Устройство относится к средствам автоматизации захвата и транспортирования листовых деталей и может быть использовано в роботизированных технологических комплексах производств легкой промышленности (швейного, обувного, кожгалантерейного, кожевенно-мехового).
Известно захватное устройство для мягких деталей [1], состоящее из чашеобразного корпуса и выполненных в виде системы игл, получающих движение от электромагнита, элементов механического захвата деталей. Недостатки устройства - сложность конструкции, связанная с наличием механизма перемещения игл, и возможность повреждения захватываемого материала иглами в процессе их перемещения по поверхности детали.
Известно также вакуумное захватное устройство [2], основным конструктивным элементом которого является соединенный с источником разрежения чашеобразный корпус, который разделен перегородкой на центральную и периферийную кольцевую камеры. Недостаток этого устройства - необходимость большого расхода воздуха для надежного захвата воздухопроницаемых деталей.
Ближайшим аналогом предлагаемого технического решения является устройство для захвата гибкого листового материала [3], состоящее из чашеобразного корпуса, соединенного с источником разрежения, и элементов механического захвата детали, выполненных в виде клещевого зажима с системой привода. Недостатки данного технического решения - сложность конструкции устройства и возможность повреждения материала детали при ее захвате клещевым зажимом.
Технической задачей изобретения является конструкция устройства, позволяющая надежный одиночный захват листовых деталей без их повреждения и без увеличения расхода воздуха.
Поставленная задача решается путем использования для процесса захвата деталей одновременно вакуума и механических элементов.
Предлагаемое захватное устройство для листовых деталей состоит из соединенного с источником разрежения чашеобразного корпуса, который разделен внутренней перегородкой на центральную и периферийную кольцевую камеры, и элементов механической фиксации деталей, при этом рабочая зона центральной камеры перекрыта вогнутой сеточной перегородкой, ограничивающей деформацию захватываемой детали, а элементы механического захвата деталей представляют собой систему игл, которые закреплены на поверхности кольца, разделяющего рабочие зоны центральной и периферийной камер, и расположены в плоскостях радиальных сечений корпуса с наклоном в направлении его краев.
На внутренней перегородке корпуса может быть установлено дросселирующее устройство, позволяющее изменять соотношение расходов воздуха, удаляемого из центральной и периферийной камер.
Технический эффект достигается благодаря таким конструктивным отличиям, как наличие вогнутой сеточной перегородки в рабочей зоне центральной камеры и элементов механической фиксации детали, представляющих собой систему игл на поверхности кольца, разделяющего рабочие зоны камер, и расположенных в плоскостях радиальных сечений корпуса с наклоном в направлении его краев, что повышает надежность одиночного захвата детали за счет пространственной деформации ее материала, в ходе которой в материал входят иглы, а это позволяет выполнить захват и последующее транспортирование детали без использования дополнительного механизма для перемещения игл и без увеличения расхода удаляемого воздуха.
Другое конструктивное отличие - наличие на перегородке, разделяющей полости центральной и периферийной камер, дросселя, позволяет рациональным образом распределить расходы удаляемого из этих камер воздуха и, таким образом, снизить общий его расход.
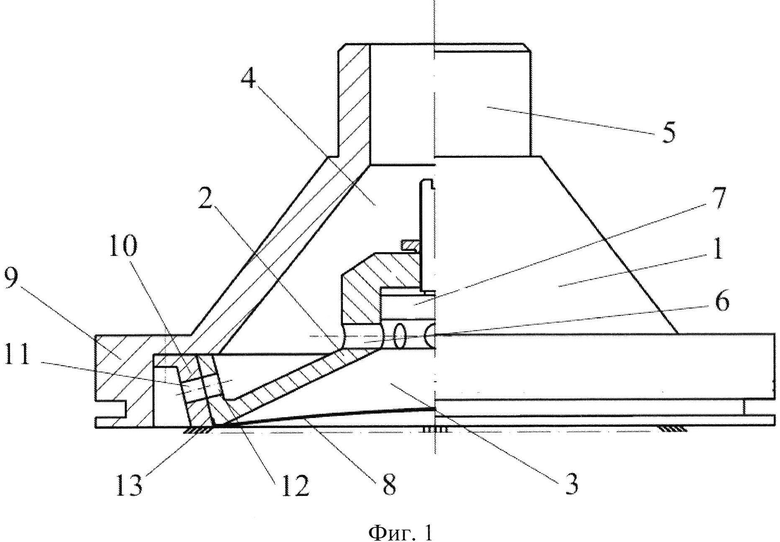
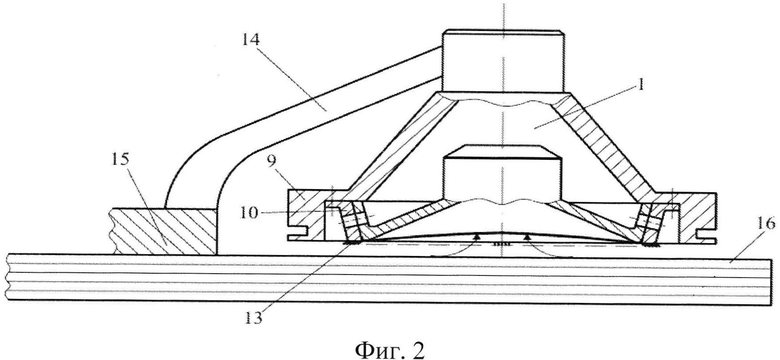
На фиг. 1 показан общий вид устройства, а на фиг. 2-4 - последовательность его взаимодействия с захватываемой деталью.
Корпус 1 устройства имеет чашеобразную форму и разделен внутренней перегородкой 2 на центральную 3 и периферийную 4 камеры. Штуцер 5 корпуса устройства связан (например, гибким шлангом) с источником разрежения (вакуум-насосом или воздуходувкой). Полости камер 3, 4 соединены между собой радиальными отверстиями 6. Степень перекрытия отверстий 6, а следовательно, и соотношение расходов воздуха, удаляемого из камер 3 и 4, можно регулировать перемещением плунжера 7 дросселирующего устройства.
Рабочая зона камеры 3 перекрыта вогнутой сеточной перегородкой 8, а рабочая зона камеры 4 представляет собой щель, ограниченную наружным кольцом 9 корпуса и разделительным кольцом 10. Эта зона соединена с полостью корпуса 1 устройства отверстиями 11, 12, расположенными соосно на кольце 10 и краевом участке перегородки 2. На находящейся между рабочими зонами центральной и периферийной камер поверхности кольца 10 закреплены элементы механического захвата деталей, которые представляют собой систему игл 13, расположенных в плоскостях радиальных сечений корпуса с наклоном в направлении его краев.
Корпус устройства связан кронштейном 14 с механизмом перемещения детали. Кронштейн имеет упор 15, обеспечивающий заданный зазор между рабочей поверхностью устройства и деталью 16, захватываемой с загрузочного столика, или из стопки кроя.
Включение разрежения в полости устройства выполняют после того, как его корпус 1 занимает положение над захватываемой деталью с зазором, задаваемым упором 15 (фиг. 2).
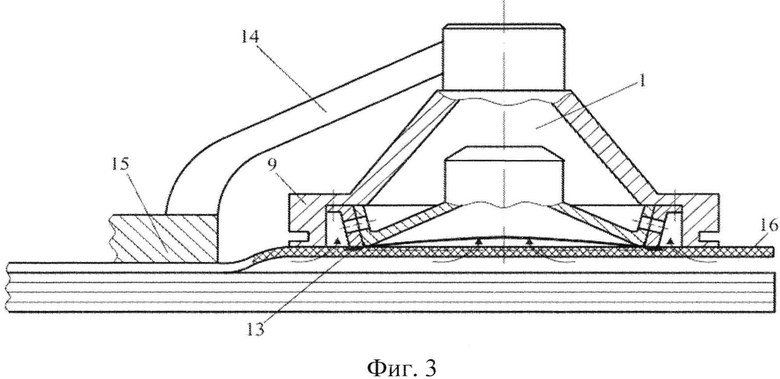
После включения разрежения отделяемая часть детали 16 сначала подсасывается к рабочей поверхности устройства, сохраняя плоскую форму, контактируя с кольцевыми элементами 9, 10 рабочей поверхности корпуса и концами расположенных здесь игл 13 (фиг. 3).
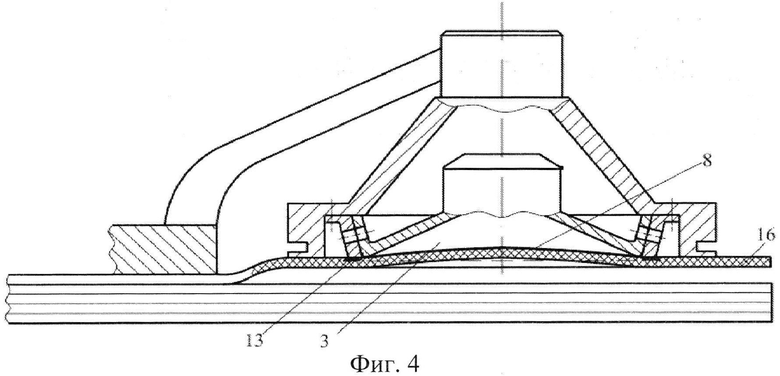
Затем участок детали, находящийся в зоне действия центральной камеры, прогибается, подсасываясь к поверхности вогнутой сетки 8, перекрывающей полость центральной камеры 3 (фиг. 4). Происходящая деформация материала вызывает смещение его участка, контактирующего с иглами 13, в сторону к центру корпуса, что приводит к накалыванию материала на кончики игл. При этом вход игл в материал происходит без смещения их кончиков относительно поверхности детали, а следовательно, снижает вероятность ее повреждения. Фиксация материала иглами позволяет снизить разрежение, а следовательно, и расход удаляемого воздуха как в период захвата, так и при последующем транспортировании детали.
Наличие дросселирующего устройства между центральной и периферийной камерами позволяет выйти на режим рационального сочетания разрежения в рабочих зонах этих камер для одновременного смещения материала детали в направлении к центру корпуса и по поверхности кольца 9, и по сеточной перегородке 8, что позволяет снизить суммарный расход удаляемого воздуха.
Источники информации
1. Авторское свидетельство SU №1811482, кл. B25J 15/04, опубл. 1981.
2. Патент RU №2050255, кл. B25J 15/04, опубл. 1995.
3. Авторское свидетельство SU №1214762, кл. C14B 17/06, B65G 47/91, опубл. 1986.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНАЯ ГОЛОВКА | 2003 |
|
RU2256549C2 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2179504C1 |
| ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА (ВАРИАНТЫ) | 2001 |
|
RU2211386C2 |
| Устройство для захвата мягких деталей | 1989 |
|
SU1742189A1 |
| Вакуумное захватное устройство | 1989 |
|
SU1815217A1 |
| Способ извлечения деталей из кассеты и устройство для его осуществления | 1989 |
|
SU1773680A1 |
| Вакуумное захватное устройство | 1990 |
|
SU1776558A1 |
| ПНЕВМАТИЧЕСКИЙ СХВАТ | 2002 |
|
RU2202466C1 |
| Захватное устройство | 1990 |
|
SU1787760A1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1994 |
|
RU2073601C1 |
Устройство относится к средствам автоматизации захвата и транспортирования листовых деталей и может быть использовано в роботизированных технологических комплексах. Захватное устройство для листовых деталей состоит из чашеобразного корпуса и элементов механической фиксации деталей. Корпус соединен с источником разрежения воздуха. Корпус разделен внутренней перегородкой на центральную и периферийную кольцевые камеры. Рабочая зона центральной камеры перекрыта вогнутой сеточной перегородкой. Элементы механического захвата деталей представляют собой систему игл. Иглы закреплены на поверхности кольца, разделяющего рабочие зоны камер. Иглы расположены в плоскостях радиальных сечений корпуса с наклоном в направлении его краев. Обеспечивается возможность надежного одиночного захвата листовых деталей без их повреждения и без увеличения расхода воздуха. 1 з.п. ф-лы, 4 ил.
1. Захватное устройство для листовых деталей, состоящее из соединенного с источником разрежения чашеобразного корпуса, который разделен внутренней перегородкой на центральную и периферийную кольцевую камеры, и элементов механической фиксации деталей, отличающееся тем, что рабочая зона центральной камеры перекрыта вогнутой сеточной перегородкой, ограничивающей деформацию захватываемой детали, а элементы механического захвата деталей представляют собой систему игл, которые закреплены на поверхности кольца, разделяющего рабочие зоны центральной и периферийной камер, и расположены в плоскостях радиальных сечений корпуса с наклоном в направлении его краев.
2. Устройство по п. 1, отличающееся тем, что на внутренней перегородке корпуса установлено дросселирующее устройство, позволяющее изменять соотношение расходов воздуха, удаляемого из центральной и периферийной камер.
| Устройство для захвата гибкого листового материала | 1984 |
|
SU1214762A1 |
| DE 19721768 A1, 26.11.1998 | |||
| Устройство для подачи листового материала | 1985 |
|
SU1348279A1 |
| Устройство для отделения листа от стопы | 1978 |
|
SU685600A1 |

