Изобретэние относится к элементам подъемно-транспортных и роботизированных систем, предназначенных для отделения и последующего переноса мягких плоских деталей типа тканей, трикотажных полотен, нетканных материалов и т.п., и может найти применение на предприятиях швейной, обувной и трикотажной промышленности.
Известно устройство для подачи листового материала, содержащее толкатель, вы- полненный в виде полого пальца с компенсационной складкой в нижней его части, изготовленного из эластичного материала, причем на нижней части этого пальца приклеена пластинка, покрытая шероховатым материалом.
Недостатками данного устройства являются сложная конструкция захватного элемента и малая его надежность.
Известно также захватное устройство, содержащее закрепленные одним кольцом на корпусе пустотелые захватные элементы
с шероховатым материалом на их рабочей поверхности и привод перемещения корпуса, причем захватные элементы выполнены в виде продолговатой эластичной трубки с внутренним продольным ее разделением на несколько камер, на которой надеты неэластичные кольца и продольные бандажи.
Недостатком известного устройства является сложная конструкция захватного элемента, большие потери энергии на деформацию и удержание заданной формы захватного элемента
Цель изобретения заключается в упрощении конструкции и повышении надежности отделения деталей от стопы.
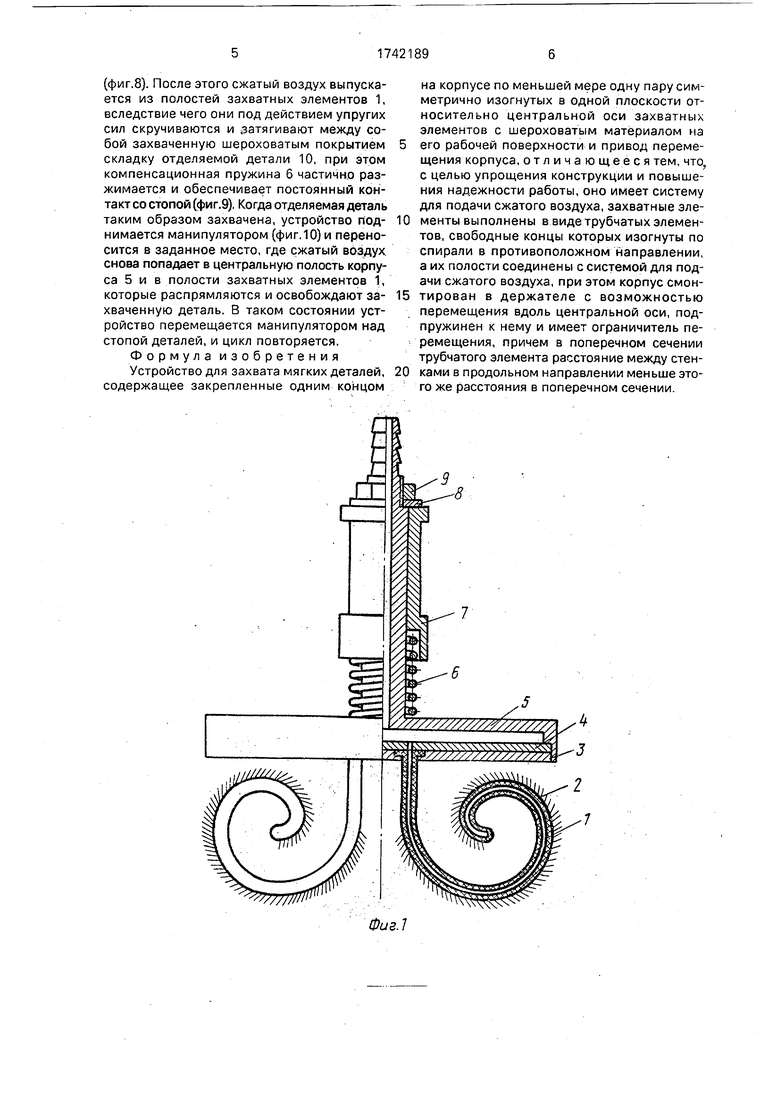
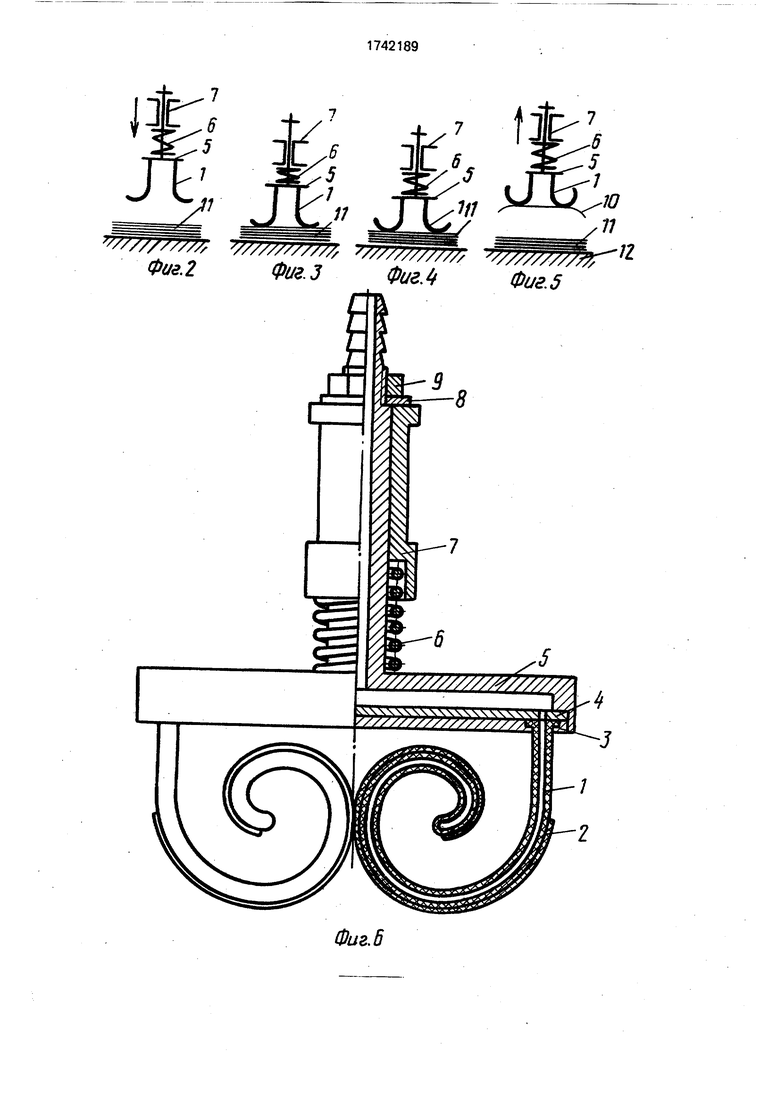
На фиг 1 представлено устройство с игольчатым покрытием рабочей поверхности захватных элементов, общий вид; на фиг.2 - момент приближения устройства с игольчатым покрытием рабочей поверхности захватных элементов к стопе; на фиг.З - момент касания устройства с игольчатым покрытием рабочей поверхности захватносл
с
х|
N
Ю «
00
ю
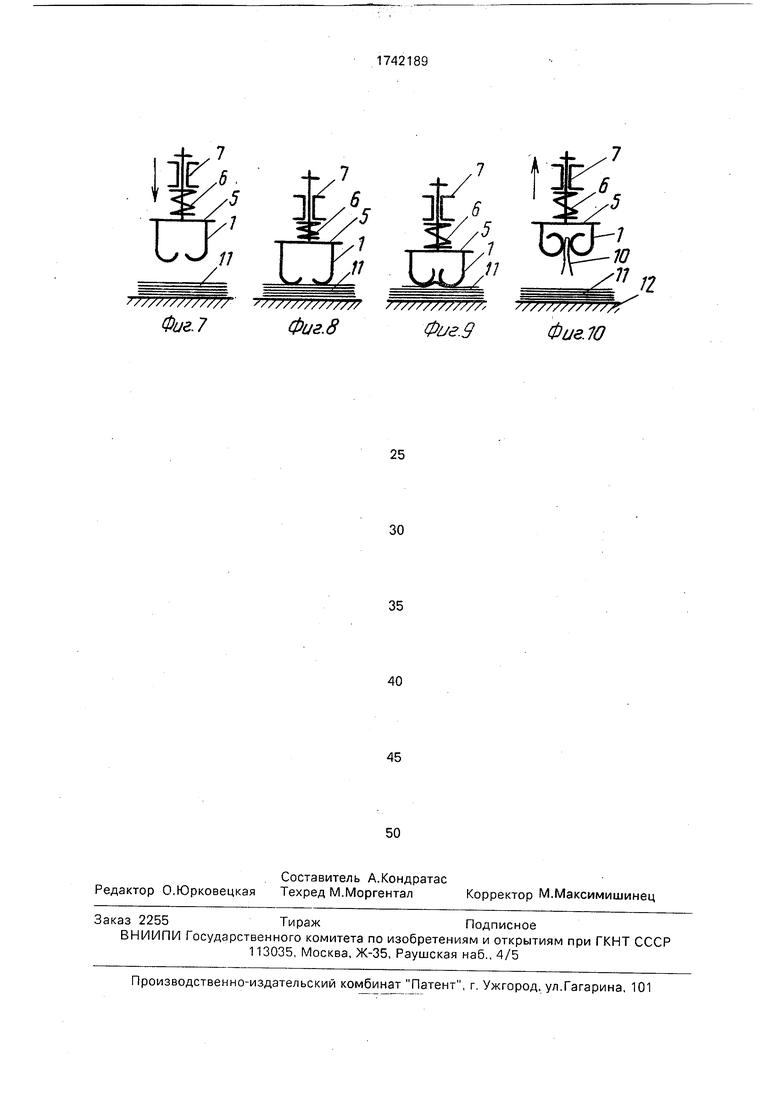
го элемента верхней детали стопы; на фиг.4 - момент захвата верхней детали стопы устройством с игольчатым покрытием захват- ных элементов; на фиг.5 - момент отделения верхней детали стопы устройством с игольчатым покрытием рабочей поверхности захватных элементов; на фиг.6 - устройство с шероховатым покрытием рабочей поверхности захватных элементов, общий вид; на фиг.7 - момент приближения устройства с шероховатым покрытием рабочей поверхности захватных элементов к стопе; на фиг.8 - момент касания устройства с шероховатым покрытием рабочей поверхности захватных элементов верхней детали стопы; на фиг.9 - момент захвата верхней детали стопы устройством шероховатым покрытием рабочей поверхности захватных элементов; на фиг.10 - момент отделения верхней детали от стопы устройством с шероховатым покрытием рабочей поверхности захватных элементов.
Устройство (фиг.1) содержит захватные элементы, выполненные в виде трубчатых элементов 1, внешняя сторона которых покрыта шероховатым или игольчатым материалом 2, установленные посредством двух дисков 3 и 4 в корпусе 5, на котором надеты компенсационная пружина 6, втулка 7 и ограничительная шайба 8, закрепленная гайкой 9, а верхняя часть этого корпуса выполнена в виде штуцера, причем устройство содержит по меньшей мере одну пару симметрично изогнутых в одной плоскости относительно центральной оси захватных элементов, свободные концы которых изогнуты по спирали в противоположном направлении и имеют в поперечном сечении расстояние между стенками в продольном направлении меньше того же расстояния в поперечном направлении. Захватные элементы могут быть расположены относитель- но друг друга так, что их наружные распрямляющиеся и закрепленные в корпусе концы находятся между их внутренними свободными заделанными концами (фиг.1) или их внутренние свободные заделанные концы находятся между их наружными распрямляющимися и закрепленными в корпусе концами (фиг.6).
Для работы устройство фиксируется за втулку 7 в вертикальном положении в захвате промышленного манипулятора (не показан). В исходном положении втулка 7 находится в верхнем положении по отношению к корпусу 5 и прижимается компенсационной пружиной 6 к шайбе 8, а элементы 1 находятся в свободном состоянии и имеют форму плоских спиралей (фиг.1 и 6).
Устройство работает следующим образом.
Сжатый воздух через шланг (не показан), надетый на штуцер, подается в центральную полость корпуса 5, откуда попадает в полости захватных элементов 1, которые под действием избыточного давления деформируются, стремясь распрямиться. Спиральный трубчатый захватный элемент в
0 поперечном сечении имеет расстояние меж- ду стенками в продольном направлении меньше того же расстояния в поперечном направлении. Под действием давления воздуха форма поперечного сечения захватно5 го элемента стремится к окружности. Вследствие этого в материале захватных элементов возникают механические напряжения, приводящие к распрямлению этих спиральных трубчатых захватных элемен0 тов. Устройство с распрямленными захватными элементами 1 опускается на стопу 11 (фиг.2 и 7). При его опускании в контакт с верхней деталью 1U стопы 11, уложенной на основании 12, входит шероховатое покры5 тие 2, расположенное на рабочей поверхности спиральных захватных элементов 1, а втулка 7 перемещается вниз по отношению к корпусу 5 и сжимает компенсационную пружину 6 (фиг.З). После этого сжатый воз0 дух выпускается из полостей захватных элементов 1, вследствие чего они под действием упругих сил скручиваются и оттягивают верхнюю деталь 10 от стопы 11, в которую внедрились наклонные иглы 2, рас5 положенные на этих спиральных захватных элементах 1, при этом компенсационная пружина 6 частично разжимается и обеспечивает постоянный контакт схвата со стопой (фиг.4). Когда отделяемая деталь 10 таким
0 образом захвачена, устройство поднимается манипулятором (фиг.5) и переносится в заданное место, где сжатый воздух снова попадает в центральную полость корпуса 5 и в полости захватных элементов 1, которые
5 распрямляются и освобождают захваченную деталь 10. В таком состоянии устройство перемещается манипулятором над стопой деталей, и цикл повторяется снова. Если рабочая поверхность захватных
0 элементов покрыта шероховатым материалом, захват верхней детали стопы осуществляется путем образования складки на ней. Устройство с распрямленными захватными элементами 1 опускается на стопу 11 (фИ| .7).
5 При этом в контакт с верхней деталью 10 стопы 11, уложенной на основании 12, входит шероховатое покрытие 2 спиральных захватных элементов 1, а втулка 7 перемещается вниз по отношению к корпусу 5 и сжимает компенсационную пружину 6
(фиг.8). После этого сжатый воздух выпускается из полостей захватных элементов 1, вследствие чего они под действием упругих сил скручиваются и .затягивают между собой захваченную шероховатым покрытием складку отделяемой детали 10, при этом компенсационная пружина 6 частично разжимается и обеспечивает постоянный контакт со стопой (фиг.9). Когда отделяемая деталь таким образом захвачена, устройство под- нимается манипулятором (фиг. 10) и переносится в заданное место, где сжатый воздух снова попадает в центральную полость корпуса 5 и в полости захватных элементов 1, которые распрямляются и освобождают за- хваченную деталь. В таком состоянии устройство перемещается манипулятором над стопой деталей,и цикл повторяется, Формула изобретения Устройство для захвата мягких деталей, содержащее закрепленные одним концом
на корпусе по меньшей мере одну пару симметрично изогнутых в одной плоскости относительно центральной оси захватных элементов с шероховатым материалом на его рабочей поверхности и привод перемещения корпуса, отличающееся тем, что, с целью упрощения конструкции и повышения надежности работы, оно имеет систему для подачи сжатого воздуха, захватные элементы выполнены в виде трубчатых элементов, свободные концы которых изогнуты по спирали в противоположном направлении, а их полости соединены с системой для подачи сжатого воздуха, при этом корпус смонтирован в держателе с возможностью перемещения вдоль центральной оси, подпружинен к нему и имеет ограничитель перемещения, причем в поперечном сечении трубчатого элемента расстояние между стенками в продольном направлении меньше этого же расстояния в поперечном сечении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1989 |
|
SU1717511A1 |
| Устройство для захвата мягких деталей | 1990 |
|
SU1713875A1 |
| Устройство для захвата уложенных в стопу текстильных заготовок | 1990 |
|
SU1733361A1 |
| Захватное устройство для отделения текстильных изделий от стопы | 1989 |
|
SU1719291A1 |
| Устройство для отделения деталей от стопы | 1989 |
|
SU1650542A1 |
| Устройство для захвата текстильных изделий | 1989 |
|
SU1742188A1 |
| Захватное устройство | 1989 |
|
SU1726242A1 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Захватное устройство для захвата мягких деталей | 1987 |
|
SU1419879A1 |
| Захватное устройство | 1984 |
|
SU1220793A1 |
Сущность: устройство для захвата мягких деталей содержит корпус, пневмопривод и захватные элементы в виде пружин. Захватные элементы выполнены в виде спиральных пружин овального сечения, внешняя сторона которых покрыта полем наклонных игл. Захватные элементы установлены посредством двух дисков в корпусе, на который надеты компенсационная пружина, втулка и ограничительная шайба, закрепленная гайкой. Верхняя часть этого корпуса выполнена в виде штуцера. Спиральные пружины расположены одна относительно другой так, что их наружные распрямляющиеся и закрепленные в корпусе концы находятся между их внутренними заделанными концами. 10 ил.
8
Ъ ///////////// WSM////S/, Фаг. 2Фиг.Зфаг.4Фиг. 5
Фиг. 6
-I- ,7
Г.
.6 ,
пт
OvJ /7
///////////// Фиг. 7
////7/////////
Фиг. 8
Vfti
n
777777777////
Фиг.9
Фиг.10
| Патент США № 4815782, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
