Изобретение относится к робототехнике и может быть использовано в захватных устройствах промышленных роботов и манипуляторов.
Известно захватное устройство, содержащее полый корпус с отверстием для подвода сжатого воздуха и смонтированную в корпусе упругую пластину, выполненную из эластичного материала, например, из резины с глухим отверстием со стороны поверх- нфст й соприкосновения с деталью (прототип).
Недостатками известного устройства являются низкая надежность работы и отсутствие возможности регулировки усилия зажима. .. - - , .
Низкая надежность работы известного устройства обусловлена низкой надежностью выполнения процессов захватываний.. Процесс захватывания детали сопровождается резким осевым перемещением захватывающей части :упругого элемента (в сторону от детали). При этом сужение глухого отверстия происходит постепенно. Это может привести к ненадежному (неполноценному) захвату детали (по меньшей поверхности взаимного контакта детали с боковой поверхностью глухого отверстия упругого элемента) или к его срыву (при захвате детали возникают силы инерции, направленные в сторону противоположную перемещению упругого элемента) его центральной части (с захватываемой деталью). Кроме того процесс освобождения детали сопровождается также резким осевым перемещением упругого элемента вместе с де- талью, что может привести к опрокидыванию последней, её переориентации или к разрушению ее обработанной поверхности. Осевые координаты захватывающей части (глухого отверстия) упругого элемента и ее размеры строго зависят от давления сжатого воздуха, поступающего в полость захватного устройства, величина которого в процессе работы может измениться. Это также обусловливает низкую надежность работы известного захватного устройства, так как при этом усложняются задачи точного позиционирования захватного устройства промышленным роботом перед процессом захватывания детали.
Целью изобретения является повышение надежности работы, а также обеспечение регулировки усилия зажатия,
Поставленная цель достигается тем, что захватное устройство, содержащее полый корпус с отверстием для подвода сжатого воздуха и смонтированную в корпусе упругую пластину, выполненную из эластичного материала, например, из резины, с глухим
отверстием со стороны поверхности соприкосновения с деталью, снабжено съемной крышкой и деформируемым элементом, причем съемная крышка смонтирована на
корпусе со стороны рабочей поверхности упругой пластины с возможностью осевого перемещения и фиксации, а деформируемый элемент выполнен в виде гофрированного цилиндра, герметично закрепленного
0 одной стороной в корпусе, а другой - по периферийным участкам пластины, при этом средняя часть упругой пластины жестко связана с корпусом, а периферийные участки пластины имеют возможность
5 взаимодействия со съемной крышкой.
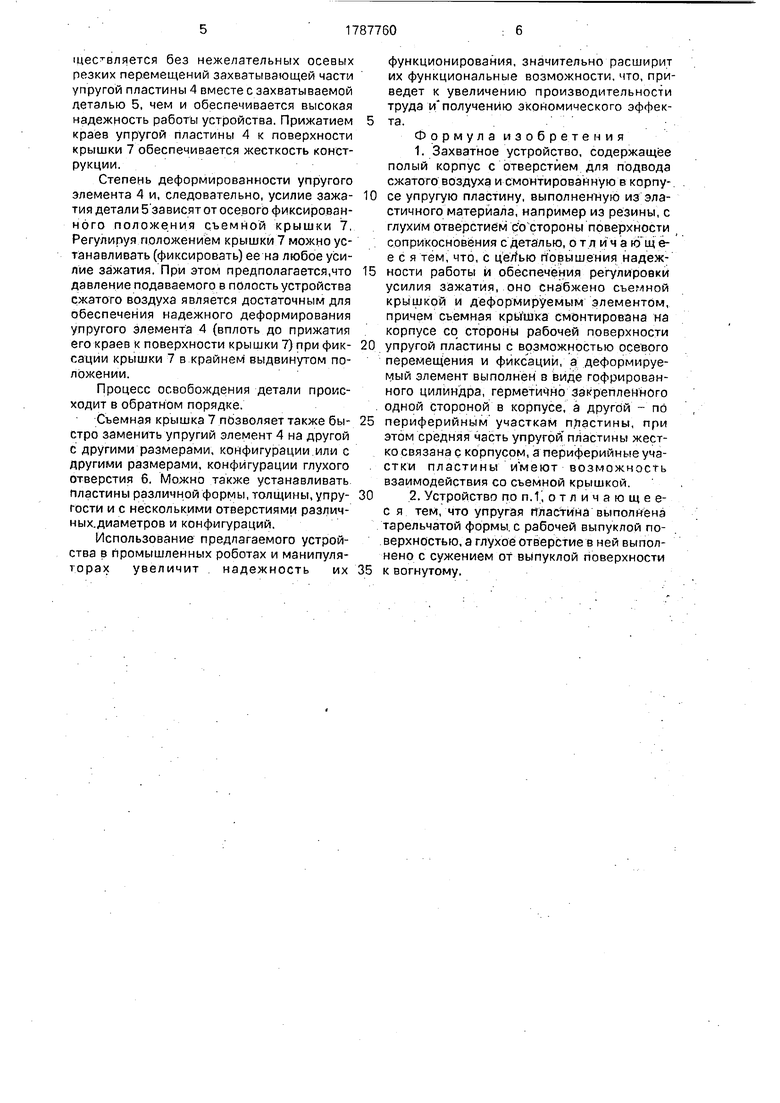
Упругий элемент может быть выполнен тарельчатой формы и установлен выпуклой поверхностью в сторону детали, а глухое отверстие в нем при этом выполнено с суже0 н ием от выпуклой поверхности к вогнутому. На фиг. 1 изображено захватное устройство, разрез; на фиг.2 - то же, с захваченной деталью.
Захватное устройство, смонтированное
5 на руке 1 манипулятора, содержит полый корпус 2 с отверстием 3 для подвода сжатого воздуха и смонтированную в корпусе упругую резиновую пластину 4 тарельчатой формы с выпуклой рабочей поверхностью,
0 со стороны которой в пластине выполнено коническое глухое отверстие 6. На корпусе ,2 со стороны рабочей поверхности упругой пластины 4 с возможностью осевого перемещения и .фиксации смонтирована съем5 ная крышка 7. Кроме того в корпусе 2 размещен деформируемый полый элемент, выполненный в виде гофрированного цилиндра 8, герметично закрепленного одной стороной в корпусе 2, а другой - по перифе0 рийным участкам пластины 4, при этом средняя часть упругой пластины 4 жестко связана с корпусом 2 посредством стержня 9.
Работа захватного устройства осущест5 вляется следующим образом.
Рука 1 манипулятора устанавливает захватное устройство в положение, в котором ось глухого отверстия 6 совпадает с осью детали 5, после чего опускает его и деталь
0 входит в отверстие 6. Затем включается подача сжатого воздуха, который, поступая через отверстие 3 в герметизированную гофрированным цилиндром 8 полость устройства, воздействует на упругий резино5 вый элемент 4, деформируя его в сторону детали 5. При этом тарельчатообразный упругий элемент 4, выпрямляясь, прижимается краями к поверхности съемной крышки 7, а боковые стенки отверстия 6 плотно схва тывают деталь 5. Процесс захватывания осущес вляется без нежелательных осевых резких перемещений захватывающей части упругой пластины 4 вместе с захватываемой деталью 5, чем и обеспечивается высокая надежность работы устройства. Прижатием краёв упругой пластины 4 к поверхности крышки 7 обеспечивается жесткость конструкции.
Степень деформированности упругого элемента 4 и, следовательно, усилие зажа- тия детали 5 зависят от осевого фиксирован- ного положения съемной крышки 7, Регулируя положением крышки 7 можно устанавливать (фиксировать) ее на любое усилие зажатия. При этом пред полагается, что давление подаваемого в полость устройства сжатого воздуха является достаточным для обеспечения надежного деформирования упругого элемента 4 (вплоть до прижатия его краев к поверхности крышки 7) при фик- сации крышки 7 в крайнем выдвинутом положении.
Процесс освобождения детали происходит в обратном порядке.
Съемная крышка 7 позволяет также бы- стро заменить упругий элемент 4 на другой с другими размерами, конфигурации.или с другими размерами, конфигурации глухого отверстия 6. Можно также устанавливать пластины различной формы, толщины, упру- гости и с несколькими отверстиями различ- ных.диаметров и конфигураций.
Использование предлагаемого устройства в промышленных роботах и манипуляторах увеличит . надежность их
функционирования, значительно расширит их функциональные возможности, что, приведет к увеличению производительности труда и получению экономического эффекта.. . Формула изобретения
1. Захватное устройство, содержащее полый корпус с отверстием для подвода сжатого воздуха и смонтированную в корпу-. се упругую пластину, выполненную из эластичного материала, например из резины, с глухим отверстием с о стороны поверхности соприкосновения с деталью, о т л и ч а е- е с я тем, что, с цё/Гью повышения надежности работы и обеспечения регулировки усилия зажатия, оно снабжено съемной крышкой и деформируемым элементом, причем съемная крьГшка смонтирована на корпусе со стороны рабочей поверхности упругой пластины с возможностью осевого перемещения и фиксаций, а деформируемый элемент выполнен в виде гофрированного цилиндра, герметично Закрепленного одной стороной в корпусе, а другой - по периферийным участкам пластины, при этом средняя часть упругой пластины жестко связана с корпусом, а периферийные участки пластины имеют возможность взаимодействия со съемной крышкой.
2. Устройство по п.1, о т л и ч а ю щ е е- с я тем, что упругая пластина выполнена тарельчатой формы, с рабочей выпуклой поверхностью, а глухое отверстие в ней выполнено с сужением от выпуклой поверхности к вогнутому.
(pl :2,2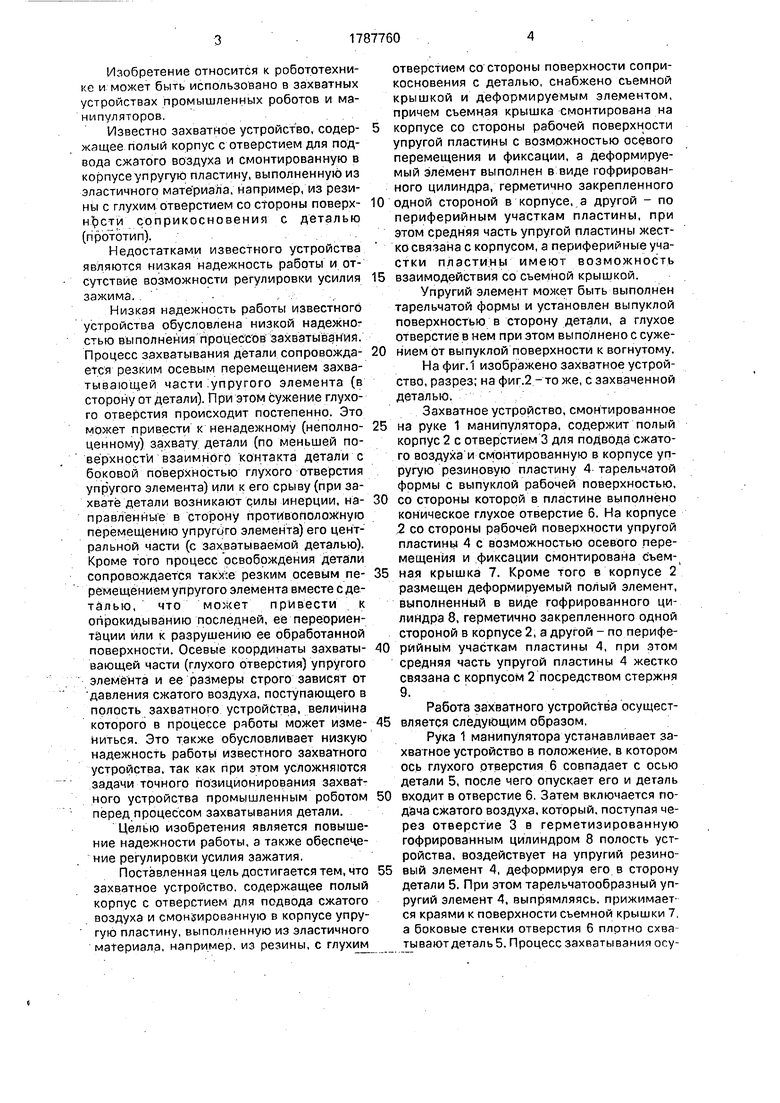
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1990 |
|
SU1768383A2 |
| Захватное устройство конструкции Г.М.Хачатряна и С.А.Новоселова | 1988 |
|
SU1537530A1 |
| Захватное устройство | 1989 |
|
SU1743853A2 |
| Захватное устройство | 1989 |
|
SU1743854A1 |
| Очувствленное захватное устройство | 1990 |
|
SU1808693A1 |
| Захватное устройство | 1989 |
|
SU1710339A1 |
| Пневматический захват | 1983 |
|
SU1117207A1 |
| Очувствленное захватное устройство | 1989 |
|
SU1743857A1 |
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Захватное устройство | 1986 |
|
SU1393627A1 |

Использование: в робототехнике, в захватных устройствах промышленных роботов и манипуляторов, Сущность изобретения: рука 1 манипулятора устанавливает захватное устройство в положение, в : f э котором ось глухого отверстия 6 упругого тарельчатообразнсго элемента 5 совпадает с осью детали 5, после чего опускает его и деталь входит в отверстие 6. Затем в герметизированную гофрированным элементом 8 полость через отверстие 3 подается сжатый воздух. Упругий.элемент 4 деформируется в сторону детали и прижимается краями к поверхности схемной крышки. Боковые стенки отверстия 6 схватывают деталь 5, Усилие зажатия детали регулируется осевым положением съемной крышки 7. 1 з.п.ф-лы. 2 йл.
| Захватное устройство | 1989 |
|
SU1717340A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
