Поражение малоконтрастных целей на фоне местности произвольной формы является актуальнейшей задачей при проектировании систем управления летательных аппаратов - ракет.
Рассматривается система управления ракетой, предназначенной для поражения малоконтрастных целей на произвольном фоне, состоящая из специальной головки визирования, обеспечивающей искусственный захват и сопровождение указанных целей, и самонастраивающегося автопилота, обеспечивающего выход в зону захвата и управление ракетой с минимальными ошибками.
Существующие системы управления с использованием головок самонаведения обеспечивают наведение ракет на наземную цель благодаря использованию характерных свойств цели, позволяющих отличить ее на окружающем фоне в радиолокационном инфракрасном или видимом спектре электромагнитных волн. Однако среди большого разнообразия целей существует ряд стратегически важных наземных целей, интенсивность излучения которых для работы головок самонаведения недостаточна по своей природе или искусственно ослаблена с целью ее маскировки (например, крупные военно-воздушные центры, важные промышленные объекты, береговые сооружения, порты, стартовые площадки баллистических ракет, военные базы и т.п.). Поэтому сопровождение, а следовательно, и поражение подобных малоконтрастных целей ракетой с системой управления, использующей обычные головки самонаведения, не представляется возможным, т.к. низкая контрастность целей не обеспечивает необходимую управляющую информацию.
Кроме этого путем создания контрмер в виде помех и ложных целей, интенсивность которых превышает интенсивность излучения цели, удается расстроить работу средств самонаведения, а выбор цели на мешающем контрастном фоне представляет трудную задачу. Сопровождение цели происходит обычно в узком угле зрения, что облегчает задачу создания контрмер в виде помех и ложных целей в этом угле зрения, и тем самым значительно снижается помехозащищенность средств самонаведения. Кроме того, в режиме сопровождения головками самонаведения не используется информация, полученная от участка местности в режиме поиска.
Все эти недостатки приводят к тому, что средства самонаведения, работающие по наземным целям, ограничивают тактические возможности самих ракет.
Сигналы управления с головки самонаведения поступают дальше в автопилот.
Точность стабилизации и управления при самонаведении, т.е. уменьшение величины промаха, существенно зависит от правильного выбора параметров автопилота (передаточных чисел, коэффициентов усиления и т.п.).
Параметры автопилота определяются после расчета и проверки моделированием системы ракета-автопилот. Причем как при расчете, так и при моделировании учитываются только заранее известные характеристики системы и условия полета. Поэтому обычные автопилоты не обеспечивают заданной точности, а иногда даже и надежной стабилизации ракеты, при действии неподдающихся расчету возмущений, как, например:
а) неравномерное сгорание топлива, приводящее к изменению величины силы тяги, являющейся случайной функцией времени;
б) срыв аэродинамического потока на поверхности кольев и фюзеляжа при изменении плотности воздуха. Точка срыва перемещается на профиле случайным образом;
в) перемещение жидкости в баках при действии ускорений на ракету;
г) различные атмосферные возмущения - изменение ветра, плотности воздуха при вхождении в плотные слои атмосферы и т.п.
Существенное влияние на точность управления ракетой оказывает изменение параметров автопилотного контура под действием изменения температур, влажности, атмосферного давления, степени влагопроницаемости, действии перегрузок, вибраций деформаций и т.д.
Точность при самонаведении в первую очередь зависит от правильного выбора закона самонаведения, формируемого автопилотом.
Но даже при лучших законах самонаведения, какими являются законы самонаведения с упреждением, например закон параллельного сближения: 
где  - угловая скорость линии ракета-цель, существуют ошибки попадания при самонаведении.
- угловая скорость линии ракета-цель, существуют ошибки попадания при самонаведении.
Ошибки разделяются на динамические ошибки, вызванные разбросом параметров аппаратуры управления и аэродинамических характеристик ракеты относительно их номинальных значений, и флюктуационные ошибки. Под динамическими ошибками попадания понимаются ошибки, вызванные движением цели и действием ветра. Под флюктуационными ошибками понимаются ошибки, вызванные случайным во времени перемещением центра отражения цели. Как видно из характера перечисленных ошибок, обеспечение повышенной точности, т.е. уменьшение промаха при самонаведении, можно достичь применением самонастраивающегося автопилота.
Влияние всех вышеуказанных факторов нельзя учесть при расчете или моделировании систем управления.
Предлагаемая система управления представлена на блок-схеме фиг.1 и состоит из головки самонаведения, включающей визир, устройство памяти, анализирующее устройство, и самонастраивающегося автопилота, состоящего в свою очередь из блока формирования управляющего сигнала, где формируется управляющий сигнал в зависимости от метода наведения, блока самонастройки и основной части автопилота, в которую входят чувствительные элементы, усилители, коммутационные устройства и т.п.
Работа головки самонаведения основана на запоминании и сопровождении информации от всего участка местности, содержащей также изображение цели. Система самонаведения, имея запомненное изображение, соответствующее точному направлению вектора скорости ракеты на цель, и текущее изображение, полученное с выхода устройства наведения, решает задачу максимального совмещения двух изображений. Величина смещения двух изображений (запомненного и текущего) является сигналом ошибки, управляющим положением ракеты в пространстве, которая поступает в блок формирования управляющего сигнала автопилота. Таким образом, головка самонаведения будет надежно выдавать сигнал управления при визировании малоконтрастных целей на фоне мешающей местности, а также в присутствии ложных целей.
Автопилот является самонастраивающимся, т.е. автопилотом, параметры которого преобразуются при изменении внешних условий в соответствии с законом самонастройки. Автопилот работает в режиме самонастройки как в процессе стабилизации полета ракеты, так и в режиме самонаведения. Схему самонастройки в режиме стабилизации можно отнести по классификации к схемам самонастраивающихся систем с экстремальной настройкой корректирующих звеньев, и она необходима для повышения качества стабилизации, т.к. это повышает точность вывода ракеты в зону захвата цели.
Схема самонастройки в режиме самонаведения относится по классификации к самонастраивающимся системам с замкнутыми целями настройки корректирующих звеньев и необходима для уменьшения величины промаха при самонаведении.
Головка совмещения изображений.
Информацию, поступающую с выхода визира (радиолокационного, инфракрасного или телевизионного типа), можно рассматривать как некоторую непрерывную функцию времени f(t). Последовательные значения этой функции зависят от распределения физических свойств определенного участка поверхности (местности) в выбранном диапазоне волн. Эта последовательность изображения определенного сюжета запоминается в полете устройством памяти непосредственно в момент совпадения изображения цели с оптической осью визира или заблаговременно (на стартовой площадке).
В результате отклонений ракеты от выбранного направления на цель, текущая информация f(t) с выхода визира представляет собой запомненную информацию с некоторым сдвигом по времени τ. Сравнивая текущую информацию с запомненной, анализирующее устройство определяет величину сдвига τ и выдает управляющий сигнал.
Два изображения представляют по своему характеру два случайных, статистически связанных сигнала (один является задержанным и сдвинутым сигналом другого), поэтому их корреляционная функция может служить мерой пространственного совмещения двух изображений. В данном случае запомненная информация периодически воспроизводится и подается в качестве эталонного изображения на анализирующее устройство, представляющее собой электронный коррелятор. С выхода визира в анализирующее устройство поступает также текущая информация, на распределение которой будет отражаться изменение положения оси визира относительно истинного направления на цель. В результате отклонения оси визира на участке самонаведения текущая информация будет отличаться от эталонной, накопленной в устройстве памяти. В процессе сравнения двух изображений (информации) с искусственным опережением или запаздыванием τ одного изображения относительно другого анализирующим устройством решается задача нахождения максимума корреляционной связи двух изображений в зависимости от их относительного сдвига. В общем случае, если представить текущую информацию в виде случайной функции, а эталонную - в виде f(t+τ), то выражение для функции автокорреляции примет следующий вид:
или
типичные графики для функции автокорреляции R(τ) различных сюжетов представлены на фиг.2. Таким образом, используя автокорреляцию информаций двух сюжетов, можно решать задачу автоматического поиска и сравнения одинаковых распределений информаций, а момент совпадения изображений использовать для измерения пространственного смещения одного изображения по отношению к другому, вызванного смещением оси визира ракеты на участке самонаведения.
Необходимо отметить, что применяемое корреляционное устройство не направлено на измерение величины корреляции, а используется только для нахождения максимума корреляционной функции, поэтому ограничение времени интегрирования, в данном случае, не является источником ошибки, т.к. выход коррелятора сохраняет форму истинной корреляционной функции.
При выборе блок-схемы устройства самонаведения исходили из условия необходимости совмещения функций запоминания и преобразования радиолокационной и инфракрасной информации с выхода совмещенного визира в телевизионную. В случае использования телевизионного визира преобразование информации не требуется. Преобразование информации дает следующие преимущества:
а) наличие на борту ракеты одного канала трансляции для передачи радиолокационной, инфракрасной и телевизионной информации;
б) возможность изменения масштаба изображения непосредственно устройством памяти (изменение растра считывания по определенному закону);
в) возможность использования переменной задержки в пределах (-τ-0 +τ).
Учитывая необходимость преобразования радиолокационной и инфракрасной информации в телевизионную, макет устройства совмещения и сопровождения заполненного изображения был построен на использовании телевизионных принципов.
Изображение с выхода телевизионной камеры записывается на запоминающем приборе-графекопе и сравнивается с тем же изображением, сдвинутый на величину τ. Устройство представляет собой электронный коррелятор, отыскивающий максимум корреляции двух изображений и определяющий сигнал ошибки, пропорциональный величине τ.
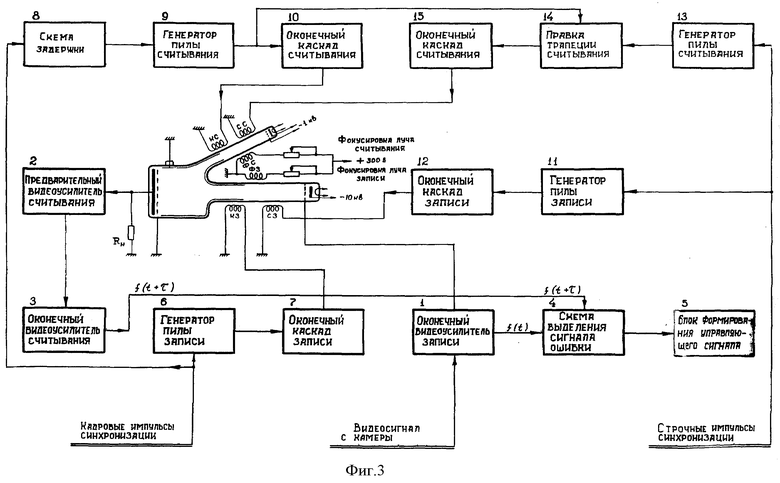
Подробная блок-схема устройства представлена на фиг.3. Видеосигнал с выхода камеры, усиленный оконечным видеоусилителем 1, подается на модулятор записывающей пушки графекона. Благодаря отклонению луча и модуляции его видеосигналом на мишени графекона возникает потенциальный рельеф, соответствующий определенному изображению. Кроме записывающего, графекон имеет считывающий луч, имеющий малое ускорение и считывающий изображение с определенным сдвигом к записывающему лучу, т.е. обеспечивается задержка считанного сигнала относительно записанного на определенное время τ. После однократной записи изображения можно производить его многократное считывание.
Сигнал с сигнальной пластины подается на видеоусилитель считывания 2, а затем на оконечный видеоусилитель 3. Сигналы с камеры f(t) и графекона f(t+τ) подаются на схему выделения сигнала ошибки 4. Сигнал ошибки подается на блок формирования управляющего сигнала 5. Импульсы синхронизации кадров синхронизируют генератор пилообразного напряжения записывающего луча 6. Пилообразное напряжение с генератора 6 подается на оконечный каскад 7, нагрузкой которого является отклоняющая катушка записи изображения по кадрам.
Импульсы синхронизации кадров подаются также на генератор пилы считывания 9, но задержанные на время τ схемой задержки 8. Пилообразное напряжение с генератора 9 подается на оконечный каскад 10, нагрузкой которого является отклоняющая катушка считывания изображения по строкам. Импульсы синхронизации строк подаются на генератор пилообразного напряжения записи 11. С генератора пилообразное напряжение подается на оконечный каскад 12.
Импульсы синхронизации строк подаются также на генератор пилы строк считывания 13. С генератора пилообразное напряжение строчной развертки подается на схему правки трапеции 14, куда также подается пилообразное напряжение кадровой развертки. Со схемы правки трапеции пилообразное напряжение строки, модулированное пилообразным напряжением кадров, подается на оконечный каскад 15.
Блок самонастройки автопилота.
а) Схема для режима стабилизации.
Схема самонастройки для режима стабилизированного полета ракеты анализирует характер переходных процессов в системе автопилот-ракета, вызванных действием различных внутренних и внешних возмущающих воздействий и осуществляет корректировку передаточных чисел. На апериодический переходный процесс схема самонастройки реагирует увеличением передаточного числа, на колебательный - уменьшением. Таким образом устанавливается передаточное число, при котором система ракета-автопилот имеет переходный процесс с небольшим перерегулированием, который обычно является оптимальным.
Время, в течение которого схема самонастройки функционирует, производит коррекцию передаточного числа, равно длительности переходного процесса.
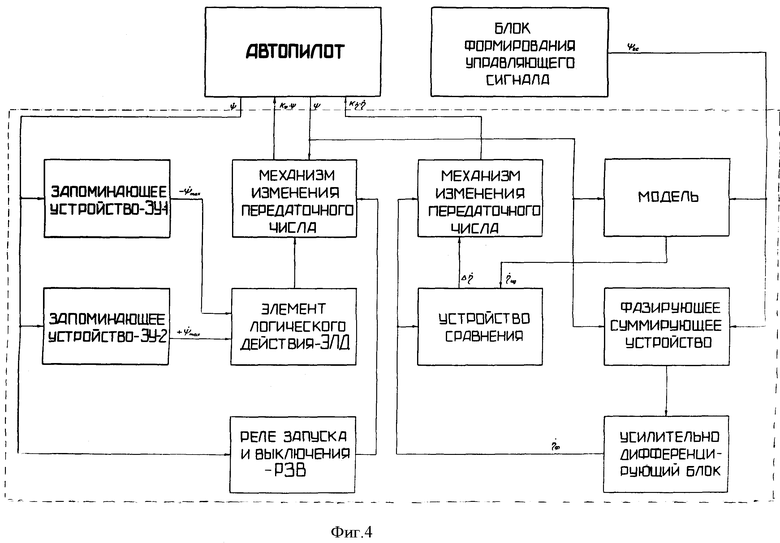
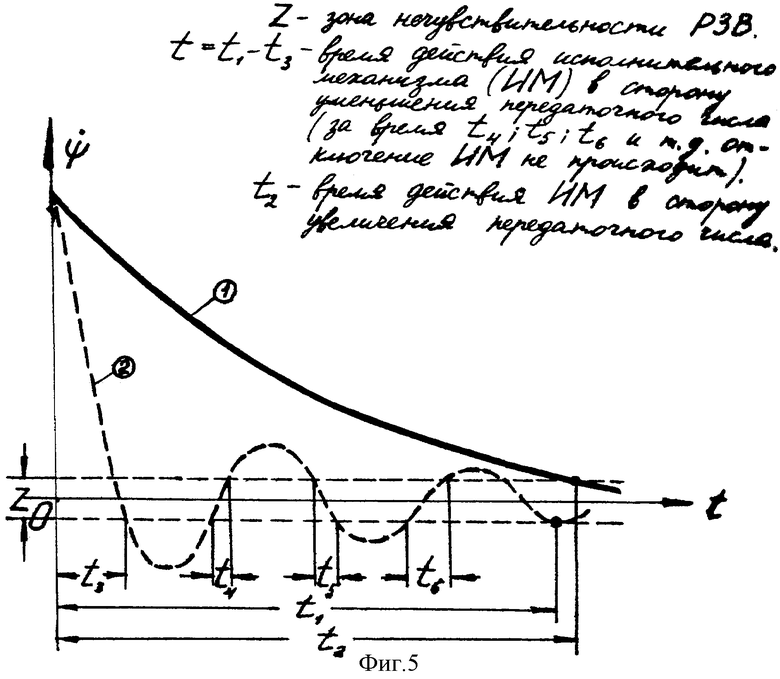
Блок-схема приставки представлена на фиг.4. Сигнал с демпфирующего гироскопа автопилота поступает одновременно на входы запоминающих устройств ЗУ-1, ЗУ-2 и реле запуска-выключения исполнительного механизма - РЗВ. В зависимости от знака и величины первого выброса сигнала -  (см. графики №1 и №2, фиг.5) РЗВ включает исполнительный механизм - ИМ, а ЗУ-1 или ЗУ-2 выдает в элемент логического действия - ЭЛД сигнал соответствующего знака.
(см. графики №1 и №2, фиг.5) РЗВ включает исполнительный механизм - ИМ, а ЗУ-1 или ЗУ-2 выдает в элемент логического действия - ЭЛД сигнал соответствующего знака.
Запоминающие устройства выполнены таким образом, чтобы ЗУ-1 запоминало максимальные отрицательные значения сигнала  , а ЗУ-2 - максимальные положительные.
, а ЗУ-2 - максимальные положительные.
При апериодическом переходном процессе в ЭЛД поступает сигнал только от одного из ЗУ (в зависимости от знака сигнала). Этого сигнала недостаточно для реверса исполнительного механизма и, начиная с момента времени t=0 (см. график №1, фиг.5) до момента t2, когда входной сигнал  упадет до величины меньшей чувствительности РЗВ, исполнительный механизм будет производить увеличение передаточного числа. По достижении момента времени t2 изменение передаточного числа прекращается, при этом автоматически снимается информация с запоминающих устройств.
упадет до величины меньшей чувствительности РЗВ, исполнительный механизм будет производить увеличение передаточного числа. По достижении момента времени t2 изменение передаточного числа прекращается, при этом автоматически снимается информация с запоминающих устройств.
Для колебательного переходного процесса, начиная с момента времени t=0 до t=t1 (см. график 2, фиг.5), будет производиться увеличение передаточного числа аналогично вышеизложенному, но по достижении момента времени t1 срабатывает второе ЗУ. Сигналов от обоих ЗУ достаточно для реверсирования исполнительного механизма. После реверса оставшееся время переходного процесса расходуется на уменьшение передаточного числа, т.е. на движение в нужном направлении.
Так как перед реверсом часть времени затрачена на неверный ход, изменение передаточного числа после реверса будет производиться с большей скоростью.
б) Схема для режима самонаведения.
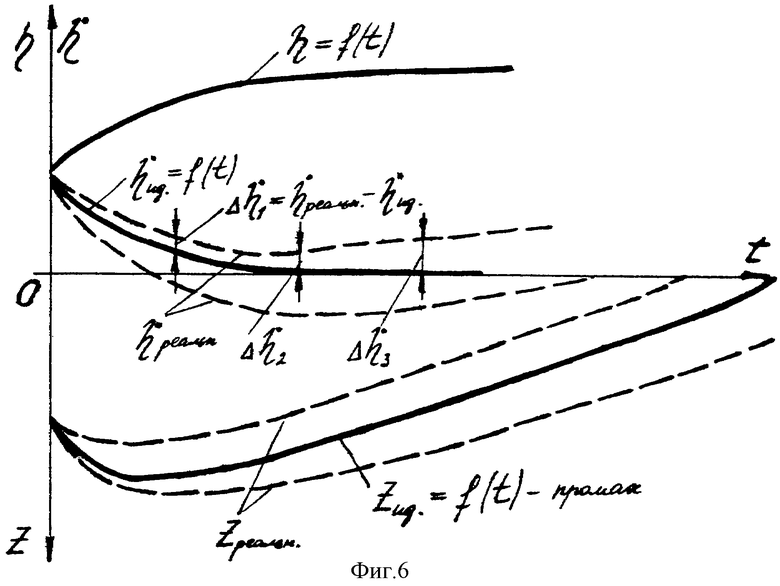
Схема построена на принципе сравнения реального управляющего сигнала, формируемого в блоках автопилота, с идеальным сигналом, который формируется в модели ракеты-автопилота. Разница этих сигналов управляет изменением передаточного числа управляющего сигнала для компенсации появившегося рассогласования. Для закона параллельного сближения возможные изменения  ,
,  и величины промаха Z приведены на графике (см. графики №3, фиг.6).
и величины промаха Z приведены на графике (см. графики №3, фиг.6).
Разница между значением  и идет в механизм изменения передаточного числа
и идет в механизм изменения передаточного числа  , до тех пор пока эта разница не сделается равной нулю. Блок-схема самонастраивающейся приставки, обеспечивающая самонаведение, представлена на фиг.4.
, до тех пор пока эта разница не сделается равной нулю. Блок-схема самонастраивающейся приставки, обеспечивающая самонаведение, представлена на фиг.4.
Сигнал с головки самонаведения, обозначенный через ψгс, и сигнал угла рыскания ψ, снимаемый с гироскопа курса, поступают одновременно на физирующий-суммирующий фильтр и на модель ракета-автопилот. На фильтре происходит физирование сигналов ψгс и ψ, т.к. они идут с различными запаздываниями, а затем их суммирование для получения величины η=ψгс+ψ.
Сигнал с физирующего фильтра поступает на усилительно-дифференцирующий блок для формирования сигнала . С модели поступает сигнал . В сравнивающем устройстве выделяется разница между и , которая через усилительный блок идет на механизм изменения передаточного числа . В механизм изменения передаточного числа поступает также величина , где и происходит формирование сигнала  , идущего на управление ракетой.
, идущего на управление ракетой.
Таким образом, предлагаемая система управления по сравнению с известными имеет следующие преимущества:
а) головка самонаведения обеспечивает выдачу сигнала управления при визировании малоконтрастных наземных целей, интенсивность излучения которых недостаточна для самонаведения обычными средствами;
б) обеспечивает захват и сопровождение целей, имеющих произвольную протяженную конфигурацию;
в) сопровождение цели ведется в широком угле зрения, что исключает возможность воздания ложных целей и тем самым увеличивает помехозащищенность системы;
г) в режиме сопровождения используется вся информация от запомненного участка местности, представляющего собой изображение случайной формы;
д) применение самонастраивающегося автопилота увеличивает точность системы управления, сокращает время на проектирование ракет путем сокращения времени на моделирование, так как при моделировании можно определять только примерные характеристики системы. Одним из главных преимуществ системы с применением самонастраивающегося автопилота является возможность значительно сократить объем летных испытаний ракеты. Указанная система с применением самонастраивающегося автопилота дает возможность устанавливать ее на ракетах с различными характеристиками.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКТИВНАЯ ЛАЗЕРНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2013 |
|
RU2573709C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ РАКЕТЫ | 2023 |
|
RU2826814C1 |
| СИСТЕМА УПРАВЛЕНИЯ КОРРЕКТИРУЕМОЙ АВИАЦИОННОЙ БОМБОЙ, ПРЕДНАЗНАЧЕННОЙ ДЛЯ ПОРАЖЕНИЯ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ ПРОТИВНИКА | 2011 |
|
RU2488769C2 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2015 |
|
RU2584210C1 |
| ОГНЕВАЯ СЕКЦИЯ | 2003 |
|
RU2253821C1 |
| АКТИВНАЯ ЛАЗЕРНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2016 |
|
RU2650789C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ В МОНОИМПУЛЬСНЫХ ГОЛОВКАХ САМОНАВЕДЕНИЯ | 2006 |
|
RU2303806C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |

Изобретение относится к военной технике. Технический результат - повышение точности наведения. Для достижения технического результата в системе использованы самонастривающийся автопилот с устройством для корректировки передаточных чисел и головка самонаведения на малоконтрастную цель. В системе также использованы устройства запоминания изображения участка местности и сравнения запомненного изображения с текущим изображением этого же участка в процессе полета. 1 з.п. ф-лы, 6 ил.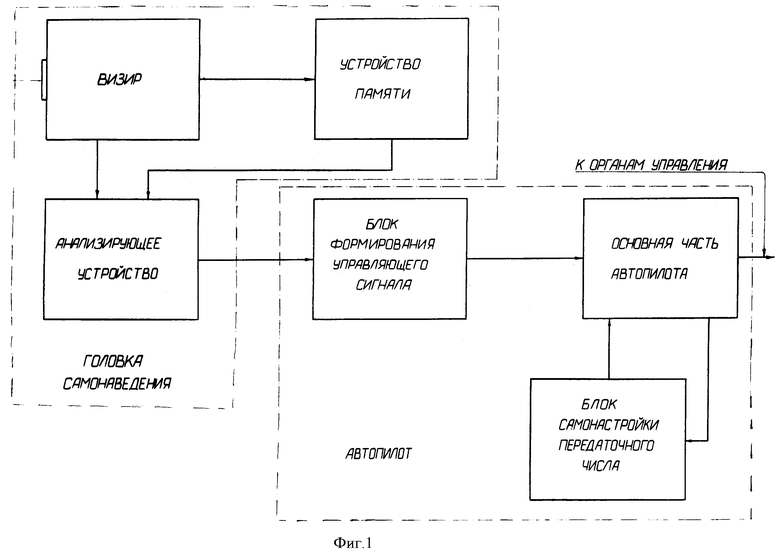
1. Система управления и самонаведения ракеты, отличающаяся тем, что, с целью точного вывода ракеты в район цели и самонаведения ее на малоконтрастную наземную цель, а также для сокращения объема летных испытаний ракет, в ней применены самонастраивающийся автопилот, с устройством для корректировки передаточных чисел и головка самонаведения на малоконтрастную цель.
2. Головка самонаведения на малоконтрастную цель в системе по п.1, отличающаяся тем, что в ней применены устройства запоминания участка местности и сравнения запомненного изобретения с текущим изображением этого же участка в процессе полета.

