Изобретение относится к автоматике, информационной и вычислительной технике и может быть использовано в телемеханике для управления и контроля сосредоточенными и рассредоточенными объектами.
Известны устройства сетевого управления информационными коммуникациями, из которых широкое применение получили построенные на использовании общеизвестного координатного метода управления, например, прямоугольно-матричных структур на основе декартовых систем координат (В.Н. Тутевич. Основы телемеханики. Москва. Издательство "Энергия". 1967. Стр. 73; 80.)
Прямоугольная решетка, построенная на основе декартовой системы координат, состоит из горизонтальных и вертикальных шин, на их пересечениях расположены, соединенные с ними своими входами логические элементы информационных коммуникаций, управление которыми осуществляют подачей на данные шины управляющих сигналов.
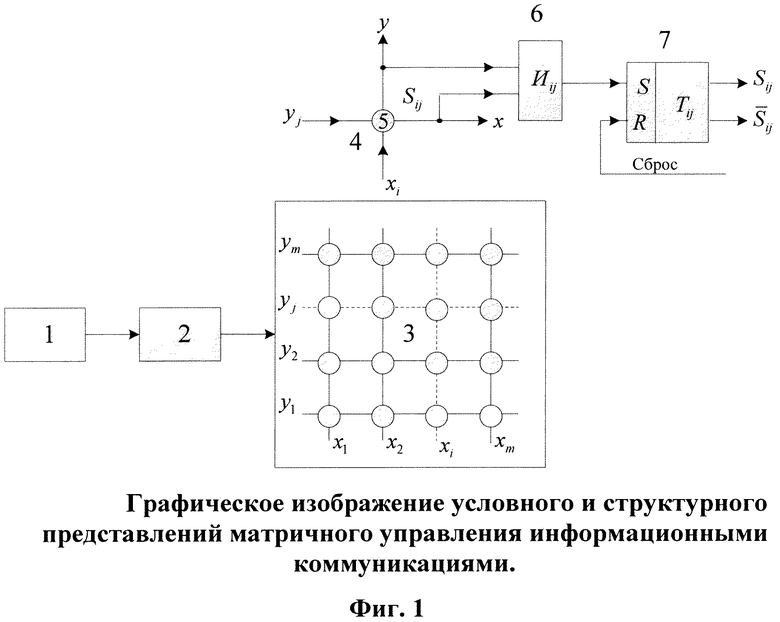
Способ матричного управления информационными коммуникациями и устройство его реализации содержат (фиг. 1) блок ввода данных 1, блок распределения управляющих сигналов 2, блок матричного управления информационными коммуникациями 3, набор координатных шин управления 4, набор логических элементов информационных коммуникаций с возможностью запоминаний их состояний "включено" и "выключено" 5, каждый из которых состоит из управляемого логического элемента И на два входа 6 и регистра (SR Триггер) 7. Первоначально (исходное состояние) блок распределения управляющих сигналов 2 находится в состоянии ожидания, все регистры выключены, на первых выходах которых имеется сигнал равное нулю (0), на вторых выходах - единице (1). При подаче с блока ввода данных первого и второго управляющих сигналов на соответствующие координатные шины матрицы, происходит включение общего для них регистра, значения сигналов, с выходов которого изменятся на противоположные, т.е. 0 на 1 и 1 на 0.
На фиг. 1 в качестве управляющих элементов использован набор координатных шин у1, у2,…, yj,…, ym и х1, х2,…, xi,…, xm прямоугольной решетки, построенной на основе декартовой системы координат, в узлах которой на их пересечениях расположены соединенные с ними своими входами логические элементы информационных коммуникаций 5, состоящих из логических элементов И 6 с возможностью запоминаний состояний объектов управления "включено" и "выключено" регистрами 7 (SR триггерами Т).
С выхода блока распределения управляющих сигналов 2 сигналы поступают на управляющие входы матрицы 3 и ее координатные шины 4, логические элементы 6 и регистры 7 состояний объектов управления информационных коммуникаций.
Матрица сетевого управления содержит m=mx+my управляющих входов, координатных шин, распределенных по осям х и у декартовой системы координат, обеспечивающих управление n=mx*my логических элементов информационных коммуникаций Sij объектов управления, расположенных в узлах матрицы.
Из рассмотрения коммуникационных возможностей данных матриц и эффективности их использования для управления числовое их выражение представим значением коэффициента эффективности, равным отношению числа управляемых объектов, или логических элементов информационных коммуникаций n к числу управляющих цепей, или координатных шин m, т.е. k=n/m.
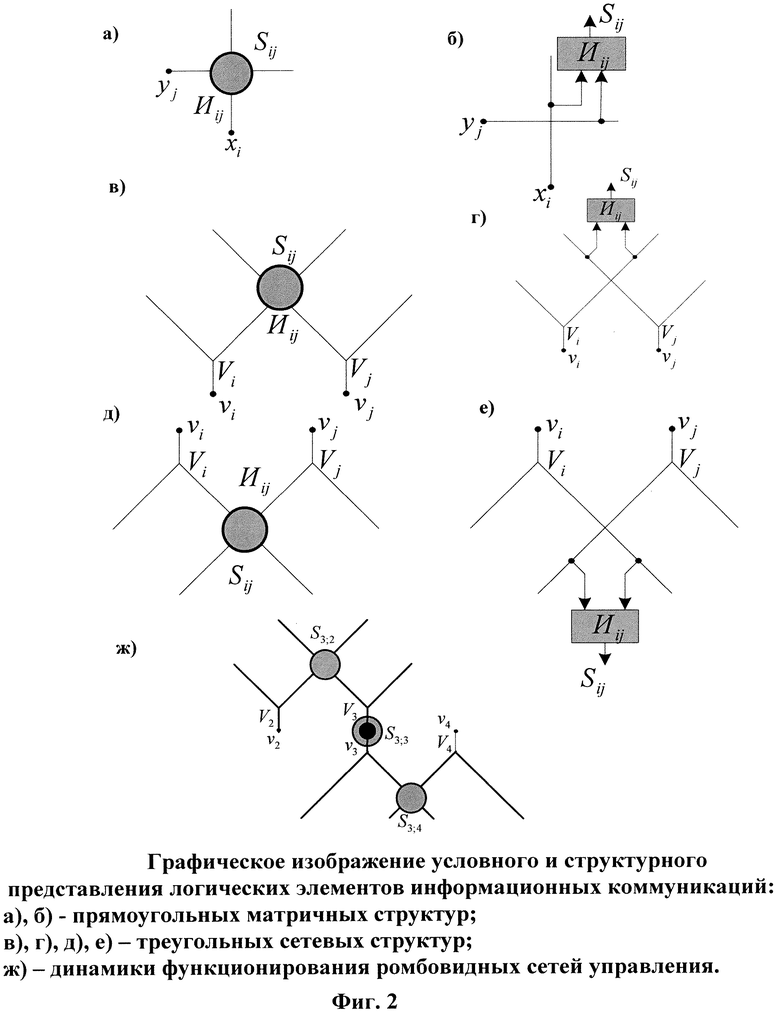
Характерным для данных структур сетевого управления является то, что они обладают малой эффективностью использования управляющих сигналов и цепей для управления информационными коммуникациями, так как для выбора и управления использованы только одна шина xi из множества х по горизонтальной оси и одна шина yj из множества у по вертикальной оси, на пересечении которых расположен общий для них управляемый элемент Sij (фиг. 2а и фиг. 26). Однако какие-либо другие шины xi и xj из множества х и шины yi и yj из множества у не использованы для управления, так как не обеспечивают выбор и управление каких-либо других объектов.
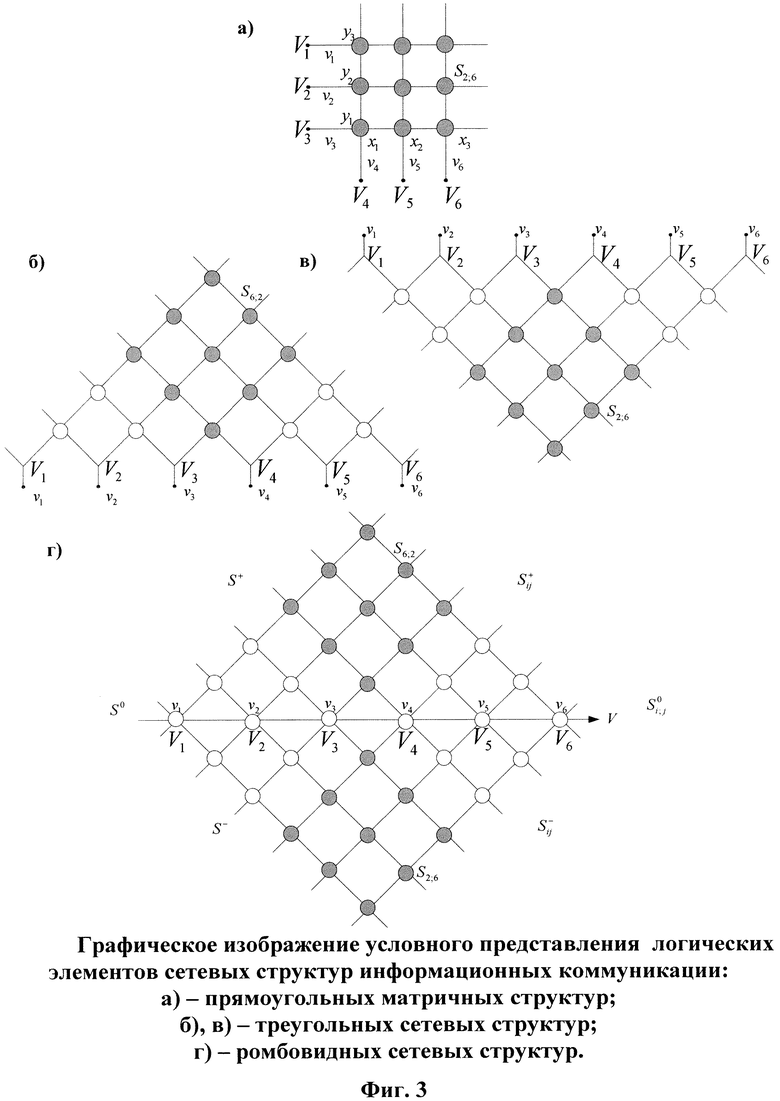
В качестве примера на фиг. 3а приведена схема прямоугольно-матричного устройства управления девяти логических элементов информационных коммуникаций и соответственно девяти объектов управления n=3*3=9 с числом управляющих входов или координатных шин m=3+3=6 при mx=3 и my=3, определяющими значение коэффициента эффективности их использования, равное k=9/6=1,5.
При других значениях управляющих входов и координатных шин число управляемых логических элементов информационных коммуникаций соответственно изменится без изменения значения эффективности их использования k=1,5.
Техническим результатом является расширение конструктивных, структурных и функциональных возможностей сетевого управления при простом наращивании числа ее управляемых элементов и минимизации числа управляющих сигналов и, соответственно, управляющих цепей, увеличение эффективности матричного управления и, следовательно, увеличения числа управляемых в сети информационных коммуникаций и соответственно объектов управления, при минимальном числе управляющих входов, обеспечение информационной совместимости частей структуры системы управления.
Это достигается тем, что в устройстве сетевого управления информационными коммуникациями на основе матричных структур, содержащем блок ввода данных, блок распределения управляющих сигналов, блок матричного управления информационными коммуникациями, набор координатных шин управления, набор логических элементов информационных коммуникаций с возможностью запоминаний их состояний "включено" и "выключено", каждый из которых состоит из управляемого логического элемента И на два входа и регистра (SR Триггер), согласно предлагаемому изобретению применены ромбовидно-матричные структуры управления информационными коммуникациями, составленные из двух треугольных матриц информационных коммуникаций, объединенных в одну, с пространственно-противоположным их расположением относительно общего для них основания, образуя геометрическую модель в виде ромба; в треугольных матрицах координатные шины матрицы изогнуты, например, V-образно и расположены своими изгибами у основания ее геометрической модели в виде треугольника, образованного из двух последовательно соединенных под углом отрезков, образуя V-образно изогнутую шину, состоящую из совокупности последовательно расположенных данных шин, ориентированную таким образом, что ее изгиб находится у основания треугольно-матричной структуры сетевого управления, образованной из пересекающихся V0,V1,…,Vi,…,Vj,…,Vm-1 управляющих шин с числом управляемых элементов Sij, равным n, определяемым числом сочетаний из m управляющих входов, матрица ромбовидной формы состоит из трех частей: верхней, центральной и нижней, содержащих логические элементы информационных коммуникаций, при этом блок ввода данных соединен через блок распределения управляющих сигналов с управляющими входами матрицы ромбовидной формы, каждая часть ромбовидной формы матрицы содержит ряды регистров R и логических элементов И: в верхней части R+ и И+, в центральной части R0 и И0 и в нижней части R- и И-, из которых входы регистров R соединены с выходами логических элементов И, образуя верхний ряд из R+ и И+, центральный ряд из R0 и И0 и нижний ряд из R- и И-, логические элементы верхнего ряда И+ имеют число входов каждый, равное значению его порядкового номера при очередности следования от начала ряда до его конца; логические элементы центрального ряда И0 имеют по три входа каждый; логические элементы нижнего ряда И- имеют число входов каждый, равное значению его порядкового номера при очередности следования от конца ряда до его начала; первые входы всех логических элементов центрального ряда, в зависимости от их порядковых номеров, через блок распределения управляющих сигналов соединены с блоком ввода данных, первые выходы верхних  и нижних
и нижних  регистров (SR триггеров) соединены с координатными шинами
регистров (SR триггеров) соединены с координатными шинами  и
и  соответственно верхней и нижней части матрицы; вторые выходы верхних
соответственно верхней и нижней части матрицы; вторые выходы верхних  и нижних
и нижних  регистров (SR триггеров) соединены с вторым и третьим входами логического элемента
регистров (SR триггеров) соединены с вторым и третьим входами логического элемента  центральной части матрицы; кроме этого второй выход верхнего регистра
центральной части матрицы; кроме этого второй выход верхнего регистра  соединен также с одним из входов каждого последующего логического элемента И+ верхнего ряда, второй выход нижнего регистра
соединен также с одним из входов каждого последующего логического элемента И+ верхнего ряда, второй выход нижнего регистра  соединен также с одним из входов каждого предыдущего логического элемента И- нижнего ряда.
соединен также с одним из входов каждого предыдущего логического элемента И- нижнего ряда.
На фиг. 2в, 2 г, 2д, 2е, 2ж представлено изображение условных и структурных логических элементов информационных коммуникаций.
На фиг. 3 представлено изображение условных логических элементов матричных структур информационных коммуникации.
На фиг. 4 представлено изображение условного и структурного ромбовидно-матричного устройства управления логическими элементами информационных коммуникаций.
На фиг. 5 представлено изображение условной и структурной динамики ромбовидно-матричного устройства управления логическими элементами информационных коммуникаций.
На фиг. 3б и фиг. 3в приведены в качестве примера два варианта пространственно-противоположного расположения данных структур с шестью (m=6) управляющими входами, или координатными шинами, обеспечивающими управление пятнадцатью логическими элементами информационных коммуникаций и, следовательно, пятнадцатью управляемыми объектам в каждой 
Значение показателя эффективности в данном случае равно k=15/6=2,5, что больше на единицу k=2,5=1,5+1 значения показателя эффективности прямоугольно-матричных структур сетевого управления.
Для еще большего увеличения числа управляемых элементов при минимизированном числе управляющих входов сетевого управления и, следовательно, увеличения его эффективности, две треугольные матрицы информационных коммуникаций (фиг. 3б и фиг. 3в) объединены в одну с пространственно-противоположным расположением их относительно общего для них основания или диагонали геометрической модели в виде ромба (фиг. 3 г).
Матрица ромбовидной формы состоит из трех частей логических элементов информационных коммуникаций: верхней S+, центральной S0 и нижней S-, содержащих соответственно  n0=m и
n0=m и  узлов информационных коммуникаций
узлов информационных коммуникаций  с общим их числом n=n++n0+n-, равным
с общим их числом n=n++n0+n-, равным  и эффективностью использования для управления
и эффективностью использования для управления 
Например, при m=6 ромбовидной матрицы управления число ее управляемых элементов  а показатель эффективности k=36/6=6, что в 4 раза больше k=1,5 для сетей прямоугольно-матричного управления и в 2,4 раза больше k=2,5 для сетей треугольно-матричного управления.
а показатель эффективности k=36/6=6, что в 4 раза больше k=1,5 для сетей прямоугольно-матричного управления и в 2,4 раза больше k=2,5 для сетей треугольно-матричного управления.
Информационная совместимость частей структуры системы управления обеспечивается ромбовидной матрицей  управляющие сигналы которой vi и vj с блока ввода данных через блок распределения управляющих сигналов поступают на входы распределителя (центрального ряда R0), принципиальная схема которого приведена на фиг. 4 и фиг. 5. Распределитель состоит из трех рядов регистров R+, R0 и R-, входы которых соединены с выходами, относящихся к ним логических элементов И+, И0 и И-, образуя верхний ряд R+и И+, центральный ряд и нижний ряд R- и И- из m регистров и m логических элементов в каждом (фиг. 4; фиг. 5).
управляющие сигналы которой vi и vj с блока ввода данных через блок распределения управляющих сигналов поступают на входы распределителя (центрального ряда R0), принципиальная схема которого приведена на фиг. 4 и фиг. 5. Распределитель состоит из трех рядов регистров R+, R0 и R-, входы которых соединены с выходами, относящихся к ним логических элементов И+, И0 и И-, образуя верхний ряд R+и И+, центральный ряд и нижний ряд R- и И- из m регистров и m логических элементов в каждом (фиг. 4; фиг. 5).
Логические элементы верхнего ряда И+ имеют число входов каждый, равное значению его порядкового номера при очередности следования от начала ряда до его конца; логические элементы центрального ряда И0 имеют по три входа каждый; логические элементы нижнего ряда И- имеют число входов каждый, равное значению его порядкового номера при очередности следования от конца ряда до его начала; первые входы логических элементов центрального ряда, в зависимости от их порядковых номеров, соединены с соответствующими выходами блока распределения управляющих сигналов.
Расширение функциональных возможностей матричного управления информационными коммуникациями  обеспечено изменением очередности следования и значений двух управляющих сигналов vi и vj с блока ввода данных через блок распределения управляющих сигналов, что определяет динамику и организацию функционирования распределителя на выбор и управление информационными коммуникациями и элементами управления в верхней, центральной и нижней части матрицы (фиг. 2ж; фиг. 3; фиг. 4; фиг. 5).
обеспечено изменением очередности следования и значений двух управляющих сигналов vi и vj с блока ввода данных через блок распределения управляющих сигналов, что определяет динамику и организацию функционирования распределителя на выбор и управление информационными коммуникациями и элементами управления в верхней, центральной и нижней части матрицы (фиг. 2ж; фиг. 3; фиг. 4; фиг. 5).
Например, при i>j выбор и управление происходит в верхней части матрицы  так как i - j будет равно положительному числу, при i=j - в центральной части матрицы
так как i - j будет равно положительному числу, при i=j - в центральной части матрицы  так как i - j=0, при i<j - в нижней части матрицы
так как i - j=0, при i<j - в нижней части матрицы  так как i - j будет равно отрицательному числу.
так как i - j будет равно отрицательному числу.
Например, при i=3 и j=2 управление происходит в верхней части матрицы  элементом S3;2, так как 3 больше 2; при i=3 и j=3 управление происходит в центральной части матрицы
элементом S3;2, так как 3 больше 2; при i=3 и j=3 управление происходит в центральной части матрицы  элементом S3;3, так как 3=3; при i=3 и j=4 управление происходит в нижней части матрицы
элементом S3;3, так как 3=3; при i=3 и j=4 управление происходит в нижней части матрицы  элементом S3;4 (фиг. 2ж); так как 3 меньше 4.
элементом S3;4 (фиг. 2ж); так как 3 меньше 4.
При подаче первого управляющего сигнала vi происходит его регистрация в верхнем  и нижнем
и нижнем  регистрах (RS триггерами), первые выходы данных регистров соединены с координатными шинами
регистрах (RS триггерами), первые выходы данных регистров соединены с координатными шинами  соответственно, верхней и нижней части матрицы; вторые выходы данных регистров соединены с вторым и третьим входами общего для их логического элемента
соответственно, верхней и нижней части матрицы; вторые выходы данных регистров соединены с вторым и третьим входами общего для их логического элемента  центральной части матрицы. Второй выход верхнего регистра
центральной части матрицы. Второй выход верхнего регистра  соединен также с одним из входов каждого последующего логического элемента И+ верхнего ряда. Второй выход нижнего регистра
соединен также с одним из входов каждого последующего логического элемента И+ верхнего ряда. Второй выход нижнего регистра  соединен также с одним из входов каждого предыдущего логического элемента И" нижнего ряда, что обеспечивает при подаче первого управляющего сигнала vi перевод их в нулевое (выключенное) состояние и невозможность регистрации, подаваемого на их входы второго управляющего сигнала vj.
соединен также с одним из входов каждого предыдущего логического элемента И" нижнего ряда, что обеспечивает при подаче первого управляющего сигнала vi перевод их в нулевое (выключенное) состояние и невозможность регистрации, подаваемого на их входы второго управляющего сигнала vj.
Кроме этого второй выход верхнего i-го регистра  распределителя соединен с одним из входов каждого последующего логического элемента И+ верхнего ряда распределителя, второй выход нижнего i-го регистра
распределителя соединен с одним из входов каждого последующего логического элемента И+ верхнего ряда распределителя, второй выход нижнего i-го регистра  распределителя соединен с одним из входов каждого предыдущего логического элемента И- нижнего ряда распределителя.
распределителя соединен с одним из входов каждого предыдущего логического элемента И- нижнего ряда распределителя.
При подаче первого управляющего сигнала vi происходит перевод их в исходное (выключенное) состояние, обеспечивая невозможность их использования для регистрации и подачи второго управляющего сигнала vj на соответствующую координатную шину матрицы.
Управление логическими элементами зависит от очередности следования двух управляющих сигналов vi и vj с блока распределения управляющих сигналов на распределитель: при подаче второго управляющего сигнала vj, при i>j выбор и управление информационными коммуникациями происходит в верхней части матрицы  при i=j выбор и управление информационными коммуникациями происходит в центральной части матрицы
при i=j выбор и управление информационными коммуникациями происходит в центральной части матрицы  при i<j выбор и управление информационными коммуникациями происходит в нижней части матрицы
при i<j выбор и управление информационными коммуникациями происходит в нижней части матрицы 
Расширение коммуникационных возможностей по групповому, избирательно-групповому и индивидуальному управлению включения и выключения объектов управления обеспечено последовательным вводом сигналов управления с блока ввода данных через блок распределения управляющих сигналов на входы распределителей поочередно от большего к меньшему, или от меньшего к большему согласно их порядковым номерам. На фиг. 4 приведена схема ромбовидно-матричного устройства управления тридцати шести логических элементов информационных коммуникаций n=36 с одним и тем же числом управляющих входов или координатных шин m=6.
На фиг. 5 приведены примеры динамики управления логическими элементами информационных коммуникаций:  при i=3 и j=2, в верхней части матрицы,
при i=3 и j=2, в верхней части матрицы,  при i=3 и j=3, в центральной части матрицы,
при i=3 и j=3, в центральной части матрицы,  при i=3 и j=4, в нижней части ромбовидной матрицы управления. При изменении очередности следования управляющих сигналов от большего к меньшему или от меньшего к большему их порядковых номеров происходит расширение коммуникационных возможностей группового, избирательно-группового и индивидуального управления.
при i=3 и j=4, в нижней части ромбовидной матрицы управления. При изменении очередности следования управляющих сигналов от большего к меньшему или от меньшего к большему их порядковых номеров происходит расширение коммуникационных возможностей группового, избирательно-группового и индивидуального управления.
Таким образом, ромбовидно-матричные структуры управления информационными коммуникациями обладают не только оптимальной структурно-функциональной организацией и наибольшим значением показателя эффективности матричного управления, но и возможностью группового, избирательно-группового и индивидуального управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО САМОЗАЩИЩЕННОГО ИНФОРМИРОВАНИЯ | 2015 |
|
RU2595758C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ И ВЫЧИСЛЕНИЯ КУВЫРКОВА (ВАРИАНТЫ) И УСТРОЙСТВО "ГЕНЕРАЛИЗАТОР" ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2012 |
|
RU2494445C1 |
| Преобразователь двоичного кода в десятичный | 1979 |
|
SU868747A1 |
| СПОСОБ СЖАТИЯ ИНФОРМАЦИИ | 2010 |
|
RU2431918C1 |
| Управляемый генератор кодовыхчиСЕл | 1979 |
|
SU851749A1 |
| Архитектура параллельной вычислительной системы | 2016 |
|
RU2644535C2 |
| ГЕНЕРАТОР КВАЗИОРТОГОНАЛЬНО-ПРОТИВОПОЛОЖНЫХ СИГНАЛОВ | 1999 |
|
RU2187144C2 |
| Ассоциативно-адресное оперативное запоминающее устройство | 1987 |
|
SU1451773A1 |
| Матричный осциллограф | 1981 |
|
SU1018021A1 |
| Устройство для телеизмерения давления скважинных штанговых насосов | 1990 |
|
SU1711218A1 |
Изобретение относится к автоматике, информационной и вычислительной технике и может быть использовано в телемеханике для управления и контроля сосредоточенными и рассредоточенными объектами. Технический результат состоит в эффективности использования управляющих цепей, или координатных шин, для управления логическими элементами информационных коммуникаций и объектов управления. Для этого в устройстве сетевого управления информационными коммуникациями применены ромбовидно-матричные структуры управления информационными коммуникациями, составленные из двух треугольных матриц, объединенных в одну, с пространственно-противоположным их расположением относительно общего для них основания, образуя геометрическую модель в виде ромба, причем в треугольных матрицах координатные шины матрицы изогнуты V-образно и расположены своими изгибами у основания ее геометрической модели в виде треугольника, образованного из двух последовательно соединенных под углом отрезков, образуя V-образно изогнутую шину. 14 ил.
Устройство сетевого управления информационными коммуникациями на основе матричных структур, содержащее блок ввода данных, блок распределения управляющих сигналов, набор координатных шин управления, набор логических элементов информационных коммуникаций с возможностью запоминаний их состояний "включено" и "выключено", каждый из которых состоит из управляемого логического элемента И на два входа и регистра, отличающееся тем, что применены ромбовидно-матричные структуры управления информационными коммуникациями, составленные из двух треугольных матриц, объединенных в одну, с пространственно-противоположным их расположением относительно общего для них основания, образуя геометрическую модель в виде ромба; в треугольных матрицах координатные шины матрицы изогнуты V-образно и расположены своими изгибами у основания ее геометрической модели в виде треугольника, образованного из двух последовательно соединенных под углом отрезков, образуя V-образно изогнутую шину, состоящую из совокупности последовательно расположенных данных шин, ориентированную таким образом, что ее изгиб находится у основания треугольно-матричной структуры сетевого управления, образованной из пересекающихся V0, V1, …, Vi, …, Vj, …, Vm-1 управляющих шин с числом управляемых элементов Sij, равным n, определяемым числом сочетаний из m управляющих входов, матрица ромбовидной формы состоит из трех частей: верхней, центральной и нижней, содержащих логические элементы информационных коммуникаций, при этом блок ввода данных соединен через блок распределения управляющих сигналов с управляющими входами матрицы ромбовидной формы, каждая часть ромбовидной формы матрицы содержит ряды регистров R и логических элементов И: в верхней части R+ и И+, в центральной части R0 и И0 и в нижней части R- и И-, из которых входы регистров R соединены с выходами логических элементов И, образуя верхний ряд из R+и И+, центральный ряд из R0 и И0 и нижний ряд из R- и И-, логические элементы верхнего ряда И+ имеют число входов каждый, равное значению его порядкового номера при очередности следования от начала ряда до его конца; логические элементы центрального ряда И0 имеют по три входа каждый; логические элементы нижнего ряда И- имеют число входов каждый, равное значению его порядкового номера при очередности следования от конца ряда до его начала; первые входы всех логических элементов центрального ряда, в зависимости от их порядковых номеров, через блок распределения управляющих сигналов соединены с блоком ввода данных, первые выходы верхних Ri + и нижних Rj - регистров соединены с координатными шинами Vi + и Vi - соответственно верхней и нижней части матрицы; вторые выходы верхних Ri + и нижних Ri - регистров соединены с вторым и третьим входами логического элемента Иi 0 центральной части матрицы; кроме этого второй выход верхнего регистра Ri + соединен также с одним из входов каждого последующего логического элемента И+ верхнего ряда, второй выход нижнего регистра Ri - соединен также с одним из входов каждого предыдущего логического элемента И- нижнего ряда.
| УСОВЕРШЕНСТВОВАННЫЙ СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО СМЕЩЕНИЯ МЕЖДУ ПАКЕТАМИ МАРШРУТИЗАЦИИ И КОММУТАЦИИ В СЕТИ ПЕРЕДАЧИ ДАННЫХ | 1997 |
|
RU2189072C2 |
| ПАРАЛЛЕЛЬНАЯ ПРОЦЕССОРНАЯ СИСТЕМА | 1991 |
|
RU2084953C1 |
| Устройство для контроля матриц памяти | 1982 |
|
SU1027780A2 |
| US 5926643 A1, 20.07.1999 | |||
| US 5963746 A1, 05.10.1999. | |||

