Изобретение относится к устройствам для видеоконтроля водных акваторий с обеспечением регистрации нештатных ситуаций, связанных с движением судов (а также катеров, лодок и т.п.) по несанкционированным (запрещенным) курсам или их нахождением в запретных зонах. Данное техническое решение может найти применение для осуществления контроля обстановки на судоходных реках и других водоемах, испытывающих существенную техногенную нагрузку в виде интенсивного судоходства.
Наиболее близким к заявляемому техническому решению и принятым за прототип является комплекс панорамного видеонаблюдения и контроля территории [Патент на полезную модель РФ, №108136, G01C 23/00, 06.09.2010 г.], состоящий из стационарных и поворотных видеокамер, каждая из которых обеспечивает автоматизированное панорамное видеонаблюдение, обнаружение, идентификацию и распознавание оператором объектов в видимом и инфракрасном участках электромагнитного спектра, измерение расстояний, азимутов выбранных объектов наблюдения и их координат. Данный комплекс дополнительно включает в себя лазерный угломер-дальномер, блок детального видеообзора, тепловизор, электронный компас, размещенные на высокоточной гиростабилизированной опорно-поворотной платформе, GPS/ГЛОНАСС приемник, соединенные с блоком обработки.
Недостатками данного устройства являются сложная функциональная схема и наличие большого количества дорогостоящих узлов и блоков, что затрудняет его практическое использование, поскольку ценность подобных систем видеонаблюдения и контроля в большой степени заключается в возможности их быстрого и экономичного развертывания на реальных контролируемых объектах.
Целью создания настоящего изобретения является упрощение конструкции и повышение надежности эксплуатации при условии (наряду с функциями видеонаблюдения, обнаружения, идентификации и распознавания объектов оператором) обеспечения возможности непрерывного определения географических координат объектов на водной поверхности контролируемой акватории.
Поставленная цель достигается тем, что:
1) Предлагается использовать видеосистему, построенную на широко распространенных и доступных в настоящее время поворотных видеокамерах видимого диапазона, имеющих Ethernet-интерфейс и ПЗС-матрицу в качестве чувствительного элемента. Видеокамеры устанавливаются, по меньшей мере, на одной опоре. Кроме того, используются стандартные сетевые устройства для архивации и обработки видеоданных, а также программное обеспечение для обнаружения, идентификации и распознавания объектов оператором.
2) Данная видеосистема дополняется узконаправленными лазерными источниками света, используемыми для постановки (проекции) на контролируемой территории (поверхности водной акватории) светящихся реперных точек. Программное обеспечение дополняется модулем, реализующим аналитические и/или интерполяционные алгоритмы определения координат объектов на местности по расположению их отображений на матрице видеокамеры относительно соответствующих отображений реперных точек.
На рисунке (фиг. 1) поясняется принцип работы предлагаемой системы, включающей:
1. Лазерные источники (ЛИ) для постановки («подсветки») реперных точек (РТ)
2. Видеокамеру видимого диапазона с Ethernet-интерфейсом (ВК)
Система определяет координаты объекта (ОБ) на водной поверхности.
Вводятся следующие обозначения:
Координаты видеокамеры на местности (xc=0, yc=0; zc).
α, β, χ - углы поворота оптической оси видеокамеры в первой системе углов Эйлера (см. [Бруевич П.Н. Фотограмметрия: Учебник для ВУЗов. М.: Недра, 1990, 285 с.]).
F - фокусное расстояние объектива камеры.
dпк и hпк - горизонтальный и вертикальный размер пикселя матрицы камеры.
Координаты изображения точки m на матрице видеокамеры в пикселях (Xm, Ym)
Координаты некоторой точки Р (связанной с объектом) на местности: (xP, yP, zP), поскольку предлагаемая система рассматривается применительно к регистрации и определению координат объектов на водной поверхности, их вертикальные координаты полагаются равными нулю: zP=0.
Координаты реперных точек на матрице видеокамеры в пикселях (Xk, Yk).
Координаты реперных точек на водной поверхности (xk, yk, zk=0).
Принцип работы предлагаемой системы следующий.
Оператор регистрирует и идентифицирует на изображении, полученном с видеокамеры, объект, находящийся на контролируемой акватории, и с помощью программного обеспечения определяет выраженные в пикселях координаты Xm и Ym связанной с объектом точки m на матрице видеокамеры. Координаты реальной точки Р на водной поверхности, которая соответствует точке m на матрице, можно вычислить по формуле [Бруевич П.Н. Фотограмметрия: Учебник для ВУЗов. М.: Недра, 1990, 285 с.]:
Где:
(Х0, Y0) - начало координат на цифровой матрице (если отсчет по пикселям производится от начала координат в ее центре, тогда Х0=0, Y0=0).
Значения коэффициентов аik:
Прямоугольные координаты (хР, yP) точки на местности могут быть легко пересчитаны в общепринятую географическую систему координат.
Коэффициенты, необходимые для вычисления координат объектов на местности, на основе выражений (1) и (2) могут быть вычислены двумя способами:
а) Прямым арифметическим вычислением, исходя из известных координат точки установки видеокамеры (хс=0, yc=0; zc), углов поворота камеры α, β, χ, ее фокусного расстояния F, размеров пикселя матрицы по горизонтали и вертикали dпк и hпк. Все эти параметры определяются в процессе привязки к местности и калибровки видеокамер(ы), а также из технической документации.
Данный способ является очевидным и может быть использован в случае использования стационарной (не поворотной) видеокамеры с неизменным фокусным расстоянием (а значит и с фиксированным увеличением), параметры видеокамеры dпк и hпк также должны быть точно известны.
б) Решением системы вида (3), получаемой из уравнений (1) и (2) относительно неизвестных коэффициентов bij, исходя из координат реперных точек, измеренных одновременно на водной поверхности (xk, yk, zk=0) и на матрице видеокамеры (Xk, Yk) при текущих значениях углов поворота и фокусного расстояния видеокамеры.
Не вдаваясь в исследование способов решения системы (3), следует лишь заметить, что для решения такой системы необходимо некоторое минимальное количество реперных точек, при этом для повышения точности вычислений желательно иметь возможно большое количество реперных точек равномерно распределенных по площади водной поверхности на контролируемой акватории. После того как коэффициенты bij найдены, выражение вида (3) используется для нахождения координат точек (хР, yP) на водной поверхности по их координатам (Xm, Ym) на матрице видеокамеры.

Последний способ может быть применен к поворотным видеокамерам с переменным фокусным расстоянием (при условии, что для текущих значений углов поворота и фокусного расстояния в поле зрения видеокамеры попадает достаточное число реперных точек), поэтому является предпочтительным для практического применения и используется в предлагаемом в настоящей заявке техническом решении.
Однако, как было указано, для его использования необходимо иметь достаточное количество реперных точек на водной поверхности. «Естественными» реперными точками могут быть хорошо заметные неподвижные и практически точечные объекты, находящиеся на контролируемой акватории, но в реальных условиях их количество может оказаться недостаточным. Создание «искусственных» реперных точек, например, путем размещения большого количества буйков на водной поверхности не всегда возможно (они могут создавать помехи судоходству) и не экономично.
Основная идея предлагаемого технического решения состоит в проецировании светящихся реперных точек на водной поверхности с помощью узконаправленных лазерных источников света (фиг. 1), работающих в видимом (350…850 нм) или ближнем инфракрасном (850…1000 нм) спектральных диапазонах, которые совпадают со спектральной областью чувствительности большинства ПЗС матриц современных видеокамер [Кругль Г. Профессиональное видеонаблюдение. Практика и технологии аналогового и цифрового CCTV. Москва: Security Focus, 2010, 640 с.].
Идентификация каждой реперной точки может осуществляться, например, путем модуляции света лазерных источников уникальным в рамках данной системы двоичным кодом.
Для сокращения числа лазерных источников могут применяться различные светоделительные приспособления, позволяющие с помощью одного источника проецировать на водную поверхность несколько реперных точек.
Преимущества заявленного технического решения по сравнению с прототипом.
Предлагаемая видеосистема не содержит в отличие от прототипа лазерный угломер-дальномер, блок детального видеообзора, тепловизор, электронный компас, размещенные на высокоточной гиростабилизированной опорно-поворотной платформе, GPS/ГЛОНАСС приемник, соединенные с блоком обработки, необходимые для определения дистанций и азимутов объектов стандартными способами. Это существенно упрощает конструкцию до уровня широко распространенных стандартных систем видеонаблюдения.
Дополнительно входящие в предлагаемую систему лазерные источники света для постановки («подсветки») реперных точек по-существу являются малогабаритными (масса не более 1 кг) светильниками (модулируемыми некоторым однократно заданным двоичным кодом), которые требуют лишь надежного крепления и подачи электропитания (мощность одного источника: до 20 Вт).
При этом система позволяет, используя проецируемые реперные точки в качестве опорной сетки, определять координаты наблюдаемых объектов (и, следовательно, дистанции и азимуты относительно любой заданной точки) с помощью программного обеспечения реализующего достаточно простые аналитические или интерполяционные методы.
Предлагаемое техническое решение относится к устройствам для видеоконтроля водных акваторий с обеспечением регистрации нештатных ситуаций, связанных с движением судов по несанкционированным курсам или их нахождением в запретных зонах. Заявленное устройство содержит, по меньшей мере, одну поворотную видеокамеру видимого диапазона с Ethernet-интерфейсом и ПЗС-матрицей, устройства архивации и обработки видеоданных, обнаружения, идентификации и распознавания объектов операторов. При этом с целью постановки светящихся реперных точек, образующих опорную сетку для определения координат наблюдаемых объектов, дополнительно вводятся малогабаритные лазерные источники света. Технический результат - упрощение конструкции и повышение надежности эксплуатации при условии обеспечения возможности непрерывного определения географических координат объектов на водной поверхности контролируемой акватории. 1 ил.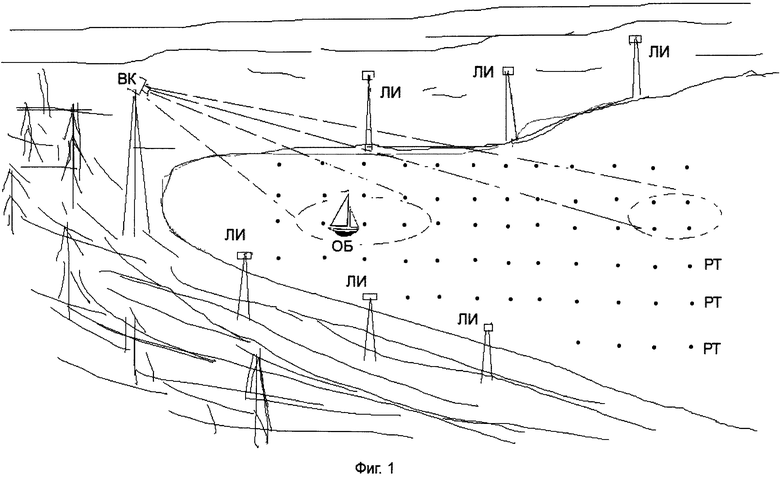
Видеосистема, включающая установленные, по меньшей мере, на одной опоре поворотные видеокамеры видимого диапазона с Ethernet-интерфейсом и ПЗС-матрицей, а также стандартные сетевые устройства для архивации и обработки видеоданных, обнаружения, идентификации и распознавания объектов оператором, отличающаяся тем, что с целью постановки светящихся реперных точек, образующих опорную сетку для определения координат наблюдаемых объектов, дополнительно вводятся малогабаритные лазерные источники света.
| Устройство для перевозки труб и тому подобных круглых предметов | 1957 |
|
SU110519A1 |
| Приспособление для перезаправки ткани на перемоточных роликах, например, отделочных текстильных машин | 1957 |
|
SU113604A1 |
| Противопыльный респиратор | 1957 |
|
SU111939A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| US 20120229282 A1, 13.09.2012. | |||

