Изобретение относится области формирования потока видеоданных вращающимся секторным фотоприемником.
Предложен способ аналогового формирования потока видеоданных и их предварительной обработки в реальном масштабе времени без привлечения цифровых вычислительных ресурсов за счет вращения секторного приемника, а также реализующее его устройство.
Известны способы формирования потоков видеоданных вращающимися секторными приемниками.
Наиболее распространенным способом формирования потока видеоданных в оптическом диапазоне являются матричные приемники и линейки. В матричных приемниках и линейках осуществляется временное накопление зарядов и их последовательное дискретное (пиксельное) считывание.
Такой подход хорош тем, что существует отлаженная технология формирования изображения в виде дискретных пикселей, которое после аналого-цифрового преобразования вводится в ЭВМ, посредством чего могут быть переданы, сохранены и/или визуализированы пользователю. При этом за качество формирования изображения отвечает пользователь, формируя изображения в условиях хорошей освещенности сцены, что обеспечивает высокое соотношение сигнал/шум. Ситуация усугубляется тем, что единичный пиксель в конкретный момент времени несет минимальное количество полезной информации и только групповые свойства пикселей как-то отражают объективную реальность.
Таким образом, известному способу присущ недостаток, заключающийся в относительно низком качестве формируемого изображения при относительно быстрых изменениях наблюдаемого объекта в условиях низкой освещенности сцены.
Наиболее близким по технической сущности к предложенному является способ [RU 2422852, C1, G01S 17/02, 27.06.2011], основанный на приеме бликовых переотражений морской поверхностью рассеянного корпусом ракеты излучения лазерного локатора непрерывного действия, при этом обработку сигналов переотражений от морских бликов производят четырехсекторным фотоприемником, работающим в режиме гетеродинного (когерентного) приема, приходящие переотраженные бликовые излучения на который суммируют по каждой из четырех равновеликих пространственных зон морской поверхности, выходные сигналы каждого из четырех секторных фотоприемников фильтруют в широкополосных полосовых фильтрах составляющих доплеровских смещений частоты зондирующего лазерного излучения, а затем подвергают спектро-временному преобразованию с помощью дисперсионных ультразвуковых линий задержки и гетеродинирования исходных широкополосных сигналов, образующихся на выходах широкополосных полосовых фильтров, на основе единого линейно-частотно-модулируемого генератора, отклики дисперсионных ультразвуковых линий задержки используют для формирования сигналов управления сканированием лазерного локатора по угловым координатам - по азимуту и углу места, а также суммируют, а полученный суммированием сигнал используют в качестве фактора обнаружения низколетящей крылатой ракеты и для принятии решения об ее уничтожении заградительным огнем бортовой артиллерии корабля по мере приближения к последнему ракеты на заданное допустимое расстояние, которое определяют по заданному максимальному повороту линии зондирующего излучения лазерного локатора по углу места относительно исходной линии визирования.
Недостатками наиболее близкого технического решения является относительно низкое качество формируемого изображения при относительно быстрых изменениях наблюдаемых объектов и необходимости использования активной лазерной подсветки.
Вместе с тем существует задача получения видеоданных о наблюдаемой сцене, когда фотоприемник вращается с частотами до 22-30 Гц. В данном случае использование матричных приемников является малопригодным из-за смаза изображения. Увеличение частоты кадросмен ведет к удорожанию конечного изделия и порождает значительный поток видеоданных, что требует увеличения вычислительных ресурсов на борту при решении задач обнаружения и селекции объектов заданных классов на сложных подстилающих поверхностях.
Задача, которая решается в данном изобретении относительно способа, заключается в получении и предварительной обработке видеоданных за счет вращения секторного приемника, что обеспечивает реальное время и не требует цифровых вычислительных ресурсов на борту для решения указанных задач.
Требуемый технический результат заключается в повышении качества и оперативности формирования видеоданных.
Поставленная задача решается, а требуемый технический результат достигается тем, что согласно способу, основанному на формировании сигналов от фотодетекторов, установленных по площади вращающегося сенсора, а также последующей организации их в ядра пространственного дифференцирования, выходные сигналы которых подвергаются аналого-цифровому преобразованию и их дальнейшей цифровой обработке, фотодетекторы устанавливают последовательно на равных расстояниях между собой на дугах с дискретными радиусами от Rmin до Rmax на площади вращающегося сенсора, имеющего форму усеченного сектора круга, который обращен большей стороной к внешнему диаметру вращения, фототоки от каждого фотодетектора усиливают по постоянному току и ограничивают по полосе частот в зависимости от скорости вращения сенсора, минимизируют собственные шумы и корректируют амплитудно-частотные характеристики каналов передачи сигналов каждого фотодетектора с последующим формированием ядер пространственного дифференцирования, сигналы с которых подвергают аналогово-цифровому преобразованию и последующей цифровой обработке.
Суть изобретения состоит в том, чтобы отказаться от формирования пиксельных изображений и перейти к эксплуатации групповых свойств видеоинформации уже на уровне секторного фотоприемного устройства, где видеоданные формируются за счет вращения сенсора и встроенной аналоговой обработки. Предлагаемый подход позволит не только формировать видеоданные и осуществлять их предварительную обработку в реальном масштабе времени без привлечения цифровых вычислительных ресурсов, но и позволит перейти от временного накопления к управляемому пространственно-временному накоплению. Такой подход обеспечит устойчивое получение видеоданных о наблюдаемой сцене в условиях низкого соотношения сигнал/шум (до 10 дБ, а не 15-25 дБ, как происходит с существующими матричными приемниками и линейками сейчас), это позволит расширить диапазон внешних условий применения сенсора. Количество ядер пространственного дифференцирования равно количеству дуг, на которых размещены фотоприемники.
Известны также вращающиеся секторные приемники.
В частности, известен пятисекционный секторный приемник [RU 2422852, C1, G01S 17/02, 27.06.2011] с ограниченными полями зрения боковых секций, который вращается в режиме секторного или кругового обзора с помощью привода, смеситель, широкополосный полосовой усилитель, дисперсионная ультразвуковая линия задержки, амплитудный детектор, общий линейно-частотно-модулированный гетеродин, согласованный с параметрами дисперсионной ультразвуковой линии задержки.
Недостатком устройства является относительно низкое качество формируемого изображения при относительно быстрых изменениях наблюдаемого объекта.
Наиболее близким по технической сущности к предложенному является пятисекционный секторный приемник с ограниченными полями зрения боковых секций [RU 2327106, C1, C01C 3/08, 20.06.2008], который вращается в режиме секторного или кругового обзора с помощью привода и который состоит из двух вычитателей амплитуд, двух инверторов, измерительного устройства, индикатора, датчика азимута и азимутальных меток, блока элементов совпадения, блока вторичной обработки, двух вычитателей и блока выдачи корректируемой константы.
Недостатком устройства является относительно низкое качество формируемого изображения при относительно быстрых изменениях наблюдаемого объекта.
Задача, которая решается в данном изобретении относительно устройства, заключается в повышении качества формируемого потока видеоданных и, следовательно, наблюдаемого изображения.
Требуемый технический результат, относящийся к устройству, заключается в повышении качества формируемого потока видеоданных в режиме реального времени и, следовательно, наблюдаемого изображения.
Поставленная задача решается, а требуемый технический результат достигается тем, что в устройстве, содержащем фоточувствительные элементы, размещенные на сенсоре, который вращается в режиме кругового обзора с помощью привода, а также блоки обработки, согласно изобретению фоточувствительные элементы выполнены в виде, по крайней мере, одной группы, в которой фоточувствительные элементы размещены последовательно на дуге с радиусом R в интервале от Rmin до Rmax на сенсоре, имеющем форму усеченного сектора круга, который обращен большей стороной к внешнему диаметру вращения, при этом, по крайней мере, одна группа фоточувствительных элементов содержит, по крайней мере, один центральный фоточувствительный элемент и, по крайней мере, по одному периферийному фоточувствительному элементу с каждой стороны, а каждый из блоков обработки, число которых соответствует числу групп фоточувствительных элементов, содержит усилители тока центрального фоточувствительного элемента, вход которого соединен с выходом центрального фоточувствительного элемента соответствующей группы, и усилители тока периферийных фоточувствительных элементов, входы которых соединены с выходами периферийных фоточувствительных элементов соответствующей группы, а также первый сумматор со взвешенными входами, которые соединены с выходами усилителей тока периферийных фоточувствительных элементов, второй взвешенный сумматор со взвешенными входами, которые соединены с выходами усилителей тока центральных фоточувствительных элементов, и операционный усилитель, функционирующий в дифференциальном режиме, первый и второй входы которого соединены с выходами соответственно первого и второго сумматоров со взвешенными входами. На чертежах представлены:
на фиг. 1 - функциональная схема вращающегося секторного приемника;
на фиг. 2 - сенсор вращающегося секторного приемника;
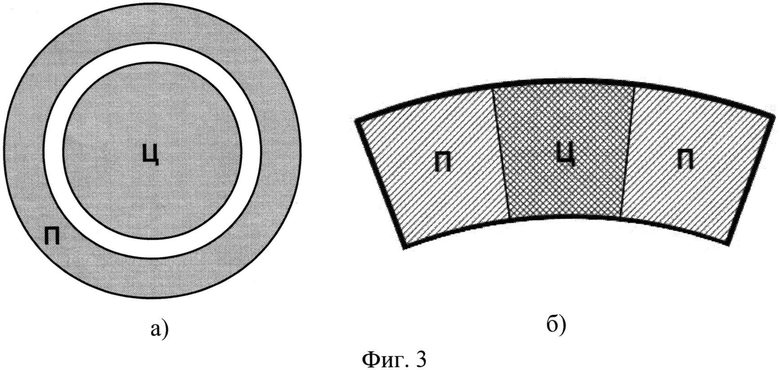
на фиг. 3 - ядро пространственного дифференцирования (3, а - общего вида, 3, б - применительно к секторному приемнику);
на фиг. 4 - выходной сигнал вращающегося секторного приемника (4, а - с одного ядра, 4, б - с группы из трех ядер);
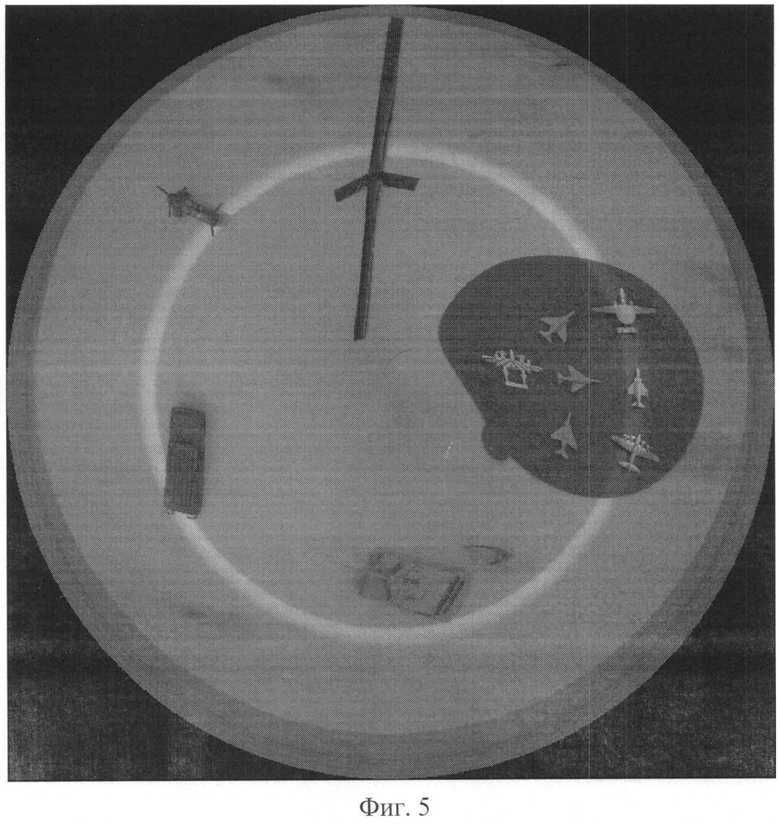
на фиг. 5 - исходное изображение;
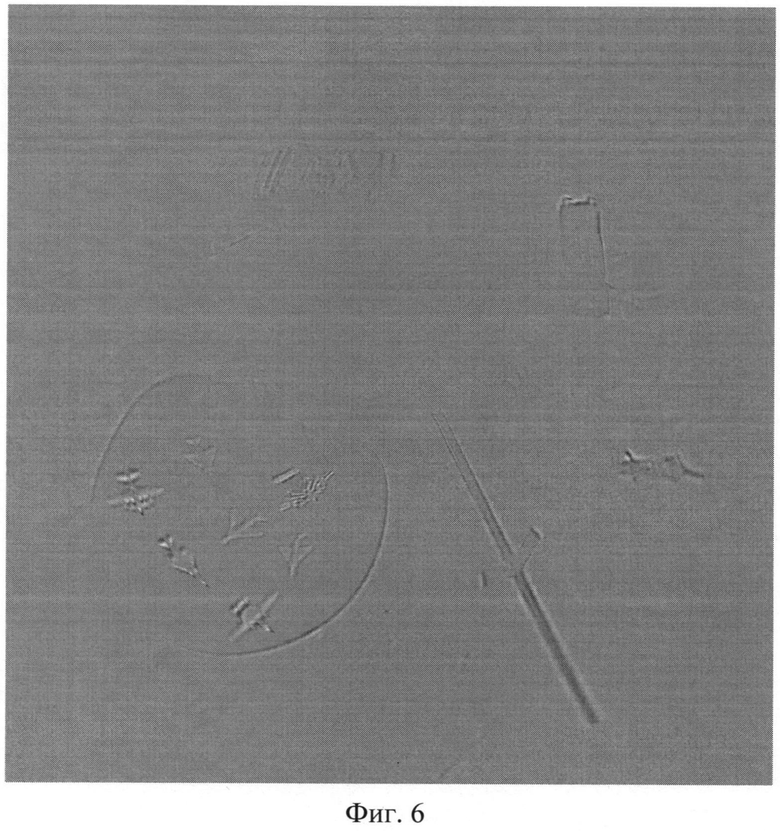
на фиг. 6 - изображение, восстановленное по сигналам секторного приемника.
Вращающийся секторный приемник содержит фоточувствительные элементы 1, размещенные на сенсоре 2, который вращается в режиме кругового обзора с помощью привода (на чертеже не показан), а также блоки обработки. Во вращающемся секторном приемнике фоточувствительные элементы 1 выполнены в виде групп, фоточувствительные элементы каждой из которых размещены последовательно на дуге с радиусом R в интервале от Rmin до Rmax на сенсоре 2, имеющем форму усеченного сектора круга, который обращен большей стороной к внешнему диаметру вращения.
В каждой группе фоточувствительных элементов имеется, по крайней мере, один центральный фоточувствительный элемент (на фиг. 1 представлен вариант из трех центральных элементов) и, по крайней мере, по одному периферийному фоточувствительному элементу (на фиг. 1 представлен вариант из трех периферийных элементов по каждую сторону от центральных), а каждый из блоков обработки, число которых соответствует числу групп фоточувствительных элементов, содержит усилители 3-1 тока центрального фоточувствительного элемента, входы которых соединены с выходами центральных фоточувствительных элементов соответствующей группы, и усилители 3-2 тока периферийных фоточувствительных элементов, входы которых соединены с выходами периферийных фоточувствительных элементов соответствующей группы, а также первый сумматор 4-1 со взвешенными входами, которые соединены с выходами усилителей 3-2 тока периферийных фоточувствительных элементов, второй взвешенный сумматор 4-2 со взвешенными входами, которые соединены с выходами усилителей тока 3-1 центральных фоточувствительных элементов, и операционный усилитель 5, функционирующий в дифференциальном режиме, первый и второй входы которого соединены с выходами соответственно первого 4-1 и второго 4-2 сумматоров со взвешенными входами.
Работает вращающийся секторный приемник следующим образом.
Фототоки от каждого фоточувствительного элемента 1 усиливаются по постоянному току в усилителях 3-1, 3-2. При усилении может проводиться ограничение по полосе частот в зависимости от скорости вращения сенсора, минимизироваться собственные шумы тракта каждого фоточувствительного элемента, корректироваться амплитудно-частотные характеристики (АЧХ) трактов каждого фоточувствительного элемента (ограничение и коррекция может быть выполнено конструкцией усилителей, в которые введены необходимые фильтрующие и корректирующие цепи) и выбираться единый для всех коэффициент усиления.
На основе сформированных таким образом сигналов формируются ядра пространственного дифференцирования, которые в секторном приемнике организуются на двух сумматорах 4-1, 4-2 со взвешенными входами и операционном усилителе 5, функционирующем в дифференциальном режиме. Количество ядер пространственного дифференцирования равно количеству дуг, на которых размещены фоточувствительные элементы. Именно такое количество выходных аналоговых сигналов от ядер пространственного дифференцирования будет сформировано сенсором в результате его вращения и только после этого они могут быть подвергнуты аналого-цифровому преобразованию (оцифровке), вследствие чего станут доступны для возможной дальнейшей цифровой обработки либо в качестве изображения наблюдаемого объекта. Внешний вид ядер пространственного дифференцирования представлен на фиг. 3.
Каждое ядро пространственного дифференцирования состоит из центральной части Ц и периферийной части П. Каждая часть формируется за счет суммирования аналоговых сигналов от фоточувствительных элементов на соответствующей этой части ядра сумматоре SЦ либо SП, выходные сигналы каждого сумматора 4-1, 4-2 подаются на дифференциальные входы операционного усилителя 5, функционирующего в дифференциальном режиме. Выходным сигналом A1(t) ядра пространственного дифференцирования является разность SЦ1(t)-SП1(t), которая реализуется аппаратно с использованием дифференциальных входов операционного усилителя 5, функционирующего в дифференциальном режиме. Вид выходного аналогового сигнала с одного ядра и с группы рядом стоящих ядер представлены на фиг. 3а и 3б соответственно. Ядро пространственного дифференцирования общего вида представлено на фиг. 4, а, а для секторного фотоприемника на фиг. 4, б. На фиг. 5 представлено изображение наблюдаемой сцены, а на фиг. 6 - изображение, восстановленное по откликам, без постоянной составляющей (засветки).
На аналоговых сигналах, формируемых ядрами пространственного дифференцирования, в результате вращения секторного фотоприемника может быть решена задача автоматического обнаружения объектов на сложных подстилающих поверхностях или же может быть восстановлено изображение в полярной системе координат (привычное изображение восстанавливается путем перевода оцифрованных отсчетов получаемых сигналов из полярной в декартову систему координат). Вид восстановленного изображения представлен на фиг. 6. Изображения, полученные таким образом, лишены такого недостатка, как смазывание изображения, вызванного движением приемника либо наблюдаемого объекта, благодаря пространственно-временному накоплению в предлагаемой схеме. Восстановление изображения заключается в переводе из полярной системы координат отсчетов сигналов, полученных от ядер пространственного дифференцирования, в декартову систему координат.
Ключевым моментом является выбор размера ядра пространственного дифференцирования, которое определяется в результате компромисса между пространственным разрешением и минимально возможным условием соотношения сигнал/шум, при котором гарантирована работа сенсора, обеспечивающая в конечном итоге обнаружение и селекцию объектов заданных классов на сложных подстилающих поверхностях.
Таким образом, благодаря усовершенствованию способа достигается требуемый технический результат, заключающийся в повышении качества и оперативности формирования видеоданных в реальном масштабе времени, а благодаря усовершенствованию устройства достигается требуемый технический результат, заключающийся в повышении качества формируемого потока видеоданных и, следовательно, наблюдаемого изображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРГАНИЗАЦИИ ЯДРА ПРОСТРАНСТВЕННОЙ ФИЛЬТРАЦИИ ИЗОБРАЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2552195C1 |
| Базовый фотоприёмник системы фасеточного зрения | 2016 |
|
RU2613349C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО АНАЛИЗА КЛЕТОК КРОВИ ПОСРЕДСТВОМ ОПИСАНИЯ ЛЕЙКОЦИТОВ НА ОСНОВЕ ОПТИЧЕСКИХ ОСОБЕННОСТЕЙ СТРУКТУРЫ ЯДЕР | 2014 |
|
RU2612007C2 |
| Способ измерения нелинейных искажений растра на экране телевизионного приемника | 1990 |
|
SU1757126A1 |
| МНОГОСТАНЦИОННАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА ПАССИВНОЙ ЛОКАЦИИ (ПРОМЫШЛЕННОГО ВИДЕНИЯ) | 2012 |
|
RU2517234C2 |
| ГИБРИДНОЕ МЕЛКОЗЕРНИСТОЕ МАСШТАБИРУЕМОЕ ВИДЕОКОДИРОВАНИЕ С ЗАВИСЯЩИМ ОТ ВРЕМЕНИ ОТНОШЕНИЕМ СИГНАЛ/ШУМ | 2000 |
|
RU2294058C2 |
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2091711C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА КООРДИНАТНОГО ОБНАРУЖЕНИЯ ОЧАГОВ ВОЗГОРАНИЙ | 2021 |
|
RU2768772C1 |
| СПОСОБ ПОСТРОЕНИЯ ПРОФИЛЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2091710C1 |


Изобретение относится к области формирования потока видеоданных вращающимся секторным фотоприемником. Способ основан на формировании сигналов от фоточувствительных элементов, установленных по площади вращающегося сенсора, их последующей организации в ядра пространственного дифференцирования, выходные сигналы которых подвергаются аналого-цифровому преобразованию и их дальнейшей цифровой обработке. Фоточувствительные элементы устанавливают последовательно на равных расстояниях между собой на дугах с дискретными радиусами от Rmin до Rmax на площади вращающегося сенсора, имеющему форму усеченного сектора круга, который обращен большей стороной к внешнему диаметру вращения. Фототоки от фоточувствительных элементов усиливают по постоянному току и ограничивают по полосе частот в зависимости от чувствительности фотоэлементов и частоты вращения сенсора. Собственные шумы минимизируют и корректируют амплитудно-частотные характеристики каналов передачи сигналов каждого фоточувствительного элемента с последующим формированием ядер пространственного дифференцирования, сигналы с которых подвергают аналогово-цифровому преобразованию и последующей цифровой обработке. Технический результат - повышение качества изображения. 2 н.п. ф-лы, 6 ил.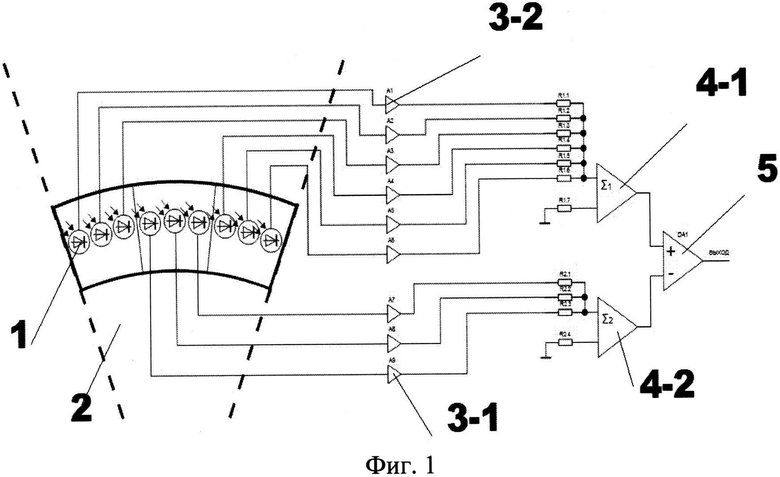
1. Способ формирования потока видеоданных вращающимся секторным приемником, основанный на формировании сигналов от фоточувствительных элементов, установленных по площади вращающегося сенсора, а также последующей организации их в ядра пространственного дифференцирования, выходные сигналы которых подвергаются аналого-цифровому преобразованию и их дальнейшей цифровой обработке, отличающийся тем, что фоточувствительные элементы устанавливают последовательно на равных расстояниях между собой на дугах с дискретными радиусами от Rmin до Rmax на площади вращающегося сенсора, имеющего форму усеченного сектора круга, который обращен большей стороной к внешнему диаметру вращения, фототоки от фоточувствительных элементов усиливают по постоянному току и ограничивают по полосе частот в зависимости от скорости вращения сенсора, минимизируют собственные шумы и корректируют амплитудно-частотные характеристики каналов передачи сигналов каждого фоточувствительного элемента с последующим формированием ядер пространственного дифференцирования, сигналы с которых подвергают аналогово-цифровому преобразованию и последующей цифровой обработке.
2. Устройство для реализации способа по п. 1, содержащее фоточувствительные элементы, размещенные на сенсоре, который вращается в режиме кругового обзора с помощью привода, а также блоки обработки, отличающееся тем, что фоточувствительные элементы выполнены в виде, по крайней мере, одной группы, в которой фоточувствительные элементы размещены последовательно на дуге с радиусом R в интервале от Rmin до Rmax на сенсоре, имеющем форму усеченного сектора круга, который обращен большей стороной к внешнему диаметру вращения, при этом, по крайней мере, одна группа фоточувствительных элементов содержит, по крайней мере, один центральный фоточувствительный элемент и, по крайней мере, по одному периферийному фоточувствительному элементу, а каждый из блоков обработки, число которых соответствует числу групп фоточувствительных элементов, содержит усилители тока центрального фоточувствительного элемента, входы которых соединены с выходами центрального фоточувствительного элемента соответствующей группы, и усилители тока периферийных фоточувствительных элементов, входы которых соединены с выходами периферийных фоточувствительных элементов соответствующей группы, а также первый сумматор со взвешенными входами, которые соединены с выходами усилителей тока периферийных фоточувствительных элементов, второй взвешенный сумматор со взвешенными входами, которые соединены с выходами усилителей тока центральных фоточувствительных элементов, и операционный усилитель, функционирующий в дифференциальном режиме, первый и второй входы которого соединены с выходами соответственно первого и второго сумматоров с взвешенными входами.
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 2012 |
|
RU2514162C1 |
| US 4703179 A, 27.10.1987 | |||
| CN 203535243 U, 09.04.2014 | |||
| US 5893972 A, 13.04.1999. | |||

