Область техники
Изобретение относится к области использования устройств, предназначенных для сканирования пространства (например: воздушного, околоземного, космического), а также непрерывного слежения за статическими и динамическими объектами в нем посредством приема электромагнитных волн радиочастотного, инфракрасного, видео, ультрафиолетового, рентгеновского и других диапазонов.
Устройства с аналогичной структурой могут быть использованы также для сканирования пространства и относительного расположения объектов в нем посредством преобразования в электрические сигналы волн другой физической природы. Технически возможно их применение в акустических средах, гидроакустических, в устройствах приема упругих волн в твердых средах, а также в средах со смешанным содержанием различных агрегатных состояний, например, в толще земной коры; перспективно их применение в системах гидролокации; в медицинских и промышленных системах ультразвуковой диагностики.
Уровень техники
Из уровня техники известно несколько аналогов предлагаемого устройства, а с учетом современных достижений в области генной инженерии и биологии клонирования сюда можно отнести широко изученные биологические системы и органы, известные из живой природы.
Первым известным и близким техническим аналогом является цифровая антенная решетка. Приемные антенные решетки, в которых, согласно ряду источников [1, 2, 3] обработка ведется цифровыми процессорами, называются цифровыми антенными решетками (ЦАР). В отношении таких ЦАР отмечается, что одни и те же сигналы, получаемые с множества ее элементов в цифровом вычислителе, могут использоваться для одновременного формирования множества независимых лучей. «Антенные решетки, формирующие с одного излучающего раскрыва несколько независимых (ортогональных) лучей и имеющие соответствующее число входов, называются многолучевыми [1, 3]». ЦАР по назначению не всегда предполагают наличие передающей (облучающей) части радиосистемы, и могут служить лишь для приема сигналов в сложной помеховой обстановке.
Второй аналог, являющийся дальнейшим развитием ЦАР, известен под названием активной фазированной антенной решетки (АФАР). Она также излучает импульсы для сканирования пространства, чтобы увеличить дальность обзора. «В активной антенне каждая ячейка решетки содержит свой приемопередатчик (возможны и "половинчатые" варианты, например, только приемник), имеющий центральное управление характеристиками. Ключевые преимущества полноценной АФАР такие: гораздо выше надежность (много независимых передатчиков и приемников), появляется возможность работать на нескольких частотах сразу (приемопередатчики независимы), выше чувствительность (потому что сигнал "детектируется" сразу приемником в базовом элементе). Радары с АФАР не только с легкостью обеспечивают полноценную работу одновременно по множеству целей (10-20-30, можно еще больше, с одновременным же сопровождением и атакой), но и попутно могут проводить картографирование поверхности под самолетом (с обнаружением наземных целей), очень эффективно отстраиваться от помех и тут же ставить помехи радарам противника» [4].
Современные ЦАР, АФАР и ФАР проектируют так, что «Фазированные решетки, как и все физические объекты, имеют и ограничения. Основное ограничение - диапазон углов, на которые луч может быть отклонен. Практически предел составляет 45…60 градусов от перпендикуляра к плоскости антенны. Отклонять луч ФАР целесообразно в пределах основного лепестка диаграммы направленности (ДН) элементов антенной решетки (этот луч шире главного лепестка ДН ФАР). Выход за пределы или приближение к краям основного лепестка ДН элементов антенной решетки приводит, в первом случае, к участию боковых лепестков ДН в формировании ДН ФАР, во втором случае, к уменьшению мощности излучения. В результате, при предельных значениях углов луч существенно ослаблен и расфокусирован» [3]. Плоскость решетки в них повернута к сканируемому сектору пространства одной и той же стороной. Противоположная сторона в работе не участвует.
Наиболее близким, с учетом сказанного выше, по аппаратной структуре и организации процесса обработки информации, получаемой в виде отражений, является орган зрения. Реальные органы зрения в живой природе используют для обработки медленные физико-химические процессы, что является их недостатком, устраняемым при использовании современных сверхбыстродействующих электронных средств обработки. Достоинством глаза по сравнению с двумя предыдущими аналогами является его высокая чувствительность, пассивный характер (использование естественной подсветки) и получение в результате обработки объемной динамичной картины окружающей действительности, которая по объему информации находится вне всякой конкуренции.
По данным различных источников количестве элементов в современных ФАР достигает тысячи, а «общее число колбочек в сетчатке человеческого глаза равно 7 млн, палочек - 130 млн. Палочки обладают очень высокой световой чувствительностью, обеспечивают сумеречное и периферическое зрение. Колбочки выполняют тонкую функцию: центральное форменное зрение и цветоощущение»[8]. Зрительный нерв, обеспечивающий передачу нервных импульсов, вызванных световым раздражением, от сетчатки к зрительному центру мозга, состоит приблизительно из 1 млн волокон [9].
Раскрытие изобретения
Основой построения и принципа работы многостанционной радиотехнической системы (МРС) пассивной локации (ПЛ) служат принцип затухания помехи (ПЗП) по п.1 ФИ 2010117813 и алгоритм пространственной селекции (АПС) [5]. ПЗП требует для получения качественной характеристики избирательности и, как следствие, получения острого луча ДН, выполнения условия неравенства (9) из [6] и тоже (2) в [7], то есть чтобы максимальные размеры антенного поля были много больше максимальной длины волны рабочего диапазона частот МРС. АПС в свою очередь, кроме производимых вычислений, требует при цифровой обработке в режиме реального времени необходимого массива памяти для хранения и сдвига выборок сигналов, объем которой возрастает пропорционально кубу от линейных размеров антенного поля (АП). Под антенным полем здесь и далее понимается плоское или трехмерное пространство, в котором расположены преобразователи волновых процессов соответствующей физической природы, в дальнейшем именуемые Антеннами.
Из-за практически трудно устранимых недостатков МРС с пространственной селекцией (МРС ПС): плохой продольной (вдоль луча) избирательности и наличия заднего лепестка ДН, - ее использование в качестве единой/единственной структуры (элементарной не структурированной НМРС ПС) для системы пассивной локации с высокой разрешающей способностью будет неэффективным. Очередное препятствие для использования напрямую НМРС ПС для пассивной локации обнаруживается при ближайшем рассмотрении и заключается в том, что технически выполнить сумматор с таким гигантским числом входных слагаемых параметров не представляется возможным.
Для устранения этих четырех недостатков, отмеченных выше подчеркиванием, используется аппаратно организованная структура обработки информации, полностью совпадающая с устройством органов зрения, за исключением устройства их преобразователей света в нервные импульсы, вместо которых используют Антенны.
В функциональном отношении в оптической части сетчатки различают три слоя нейронов: 1. Наружный световоспринимающий или нейроэпителиальный слой, представлен палочками и колбочками, которые по нервному волокну, минуя ядро первого нейрона, передают импульсы через синапсы ко второму слою нейронов. 2. Внутренний второй слой нейронов, так называемых биполярных клеток, объединяет в каждой из низ до 30 колбочек или до 500 палочек. 3. Третий слой ганглиозных клеток-нейронов образован крупными клетками с двухконтурным ядром и большим ядрышком. Ганглиозная клетка вступает в контакт с группой биполяров, а один биполяр - с гроздьями палочек и колбочек. Трансформация световой энергии в сетчатке осуществляется благодаря сложному фотохимическому процессу, сопровождающемуся распадом фотореагентов с последующим их восстановлением при участии витамина A и других веществ. При этом концентрация колбочек растет к центру сетчатки. Слой наружных отростков у палочек содержит красящее вещество родопсин, а у колбочек - иодопсин.
По аналогии со строением сетчатки, к первому слою аппаратуры МРС ПЛ следует отнести управляемые приемники, на вход которых подключены Антенны, содержащие приемные тракты с регулируемой полосой приема и аналого-цифровые преобразователи (АЦП). Во втором слое располагаются цифровые контроллеры (или процессоры), в которых выполняется функция синхронизации и суммирования сигналов с приемников первого слоя, объединенных в АП достаточно малого размера (единичных АП-ЕАП), но удовлетворяющего условию неравенства (9) из [6]. Функция задержки, или создания массива выборок, необходимого для ее получения, которая необходима для синхронизации полезного сигнала перед суммированием, может быть аппаратно организована как в приемниках, так и в контроллерах второго слоя. Аналогично сетчатке, в качестве Антенн в первом слое могут использоваться Антенны на разный частотный диапазон, высокий и низкий, с преобладанием числа высокочастотных Антенн (о причине чего будет сказано далее). Ширина частотных трактов приемников определяется заданной скоростью перемещения объектов, так как с увеличением их скорости растет доплеровский сдвиг частоты, в результате чего может произойти виртуальное исчезновение объекта из поля зрения.
Третий и последующий слои организуются аналогично второму. При этом вверх будут идти команды управления задержками, а вниз - результаты суммирования. Величины задержек могут вычисляться в каждом из контроллеров слоя исходя из значений пространственных координат центральных точек ЕАП первого слоя. Координаты целесообразно задавать лишь при начальной инициализации всей МРС ПЛ. Последним слоем или устройством обработки, в зависимости от объема суммируемой со всего АП информации, может служить высокопроизводительная суперЭВМ. При такой аппаратной организации процесса обработки существенно, на несколько порядков, будет уменьшен объем требуемого массива динамической памяти, необходимой для хранения и сдвига во времени выборок информации, поступающей на вход всей МРС ПЛ. Такая структура реализует свойство ассоциативности для сумм, включающих в себе более трех слагаемых.
В зависимости от объема информации, принятой всем АП и подлежащей обработке, вниз к суперЭВМ необходимо организовать соответствующие по объему каналы. Они, как в органе зрения, могут быть организованы по типу передаваемой информации: 1) каналы для информации, предназначенной для алгоритмов обнаружения статических или динамических объектов, и 2) каналы для информации, используемой АПС, о более детальных свойствах обнаруженных объектов (размерах, отражающей способности, направлению и скорости перемещения). Аналогично, целесообразно выделить 3) каналы для передачи командной информации. Первые алгоритмы требуют постоянного сканирования пространства, а вторые - более детального сканирования отражений от выбранных для изучения (осмотра) объектов.
В качестве первого и второго типа алгоритмов может быть использован один и тот же АПС, но работающий в разных режимах работы. Обозначим для отличия точек приема, т.е мест расположения Антенн, от точки, выбранной в пространстве, в которой при реализации АПС находится (или отсутствует) условный источник сигнала, последнюю как точку сходимости (ТС). При совпадении всех ТС, выбранных всеми ЕАП, а также при наличии в ней (в единой ТС) источника или объекта, отражающего сигнал, на выходе последнего сумматора АПС возникнет корреляционный максимум.
Структурная схема организации потоков информации и вносимых контроллерами задержек показана на фигуре 1. Величины задержек для наглядности показаны в виде протяженности линейных размеров регулируемых линий задержки (РЛЗ). Так как объект находится слева от плоской горизонтальной решетки, то наибольшая задержка для синхронизации до суммирования вносится в левые сигналы от приемников. Сокращения на фигуре: ПРМ - управляемый цифровой приемник, ЦК1-1…1-N - цифровой контроллер первого слоя контроллеров, ЦК2-1 - цифровой контроллер второго слоя контроллеров, МП - многопроцессорное вычислительное устройство; «3D - база данных» - динамически обновляемая структурированная база данных, содержащая информацию о координатах и других свойствах просканированных точек пространства. «Источником внешней подсветки» могут служить один или несколько внешних естественных или техногенных источника. Также могут восприниматься собственные излучения объекта, например инфракрасное излучение, акустическое, виброакустическое излучение.
В качестве основного, но не единственного алгоритма используется АПС. В МРС ПЛ полезно будет также применение компенсационных методов подавления сосредоточенных помех, методов синтезирования апертуры [10] и алгоритмов обнаружения движения, основанных на эффекте Доплера. В основу работы АПС положено триединство: ПЗП, условие (9) из [6] и синхронизация сигналов МРС по воображаемому фронту волны из ТС, - и пошагово он состоит в следующем.
Шаг 1. Создаем массив принимаемых сигналов от МРС с заданным числом n, которое определяется необходимым уровнем затухания сигнал/помеха, в том числе согласно [6] и для отрицательных в дБ значений. Уровень на входе АПС - это уровень на входе МРС, а выход - это вход цифрового контроллера нижестоящего слоя или в последнем слое определителя параметров сигнала в точке сходимости. Объем массива отсчетов для цифровой обработки будет равен:
M=n·Fдис.·k·λизл./Vcp,
где n - число приемников или количество антенн в ЕАП;
Fдис. - частота дискретизации АЦП. Разрядность каждого отсчета определяется разрядностью АЦП и влияет на общий объем памяти массива в битах;
k=Lmax/λизл.max Lmax - максимальный размер ЕАП и далее послойно АП всей МРС;
Vcp. - скорость сигнала в среде распространения, для радиоволн=c.
При обработке сигнала в режиме реального времени массив обновляется (сдвигается) в каждом из каналов приема по принципу стека, первым вошел - первым вышел.
Шаг 2. По известным координатам вычисляем n расстояний Ri от точек приема до ТС. Поскольку АП обладает низкой продольной (вдоль луча ДН) избирательностью, то выбор координат излучателя при приеме из дальней зоны может быть приблизительным.
Шаг 3. Определяем максимальное расстояние Rmax. из полученных Ri.
Шаг 4. Вычисляем временные задержки, которые при цифровой обработке выражаются числом отсчетов определяемым из:
Ni=Fдис.·(Rmax-Ri)/Vcp.
Нулевая задержка будет у точки приема с Rmax=Ri.
Аналогично за 4 шага АПС можно выполнить в полярной системы координат, но при этом придется выполнять более сложную операцию взятия косинуса угла.
Сложность реализации МРС ПЛ непрерывного действия состоит в том, что при заданных разрешающей способности и дальности действия системы время обзора увеличивается обратно пропорционально площади минимального объекта и пропорционально квадрату расстояния до него. Учитывая динамический характер и множественность отслеживаемых целей, требования к быстродействию МРС становятся практически нереализуемыми. Выходом из создавшегося коллапса служит применение в составе алгоритмов обработки алгоритма секторного обнаружения (АСО), который реализуется тем же АПС при переносе ТС в ближнюю зону исходя из выражения.
φобз.=2·arcsin[(Lmax/2)/RTC];
Где φобз. - требуемый угол обзора;
RTC - расстояние от ценра ЕАП до TC.
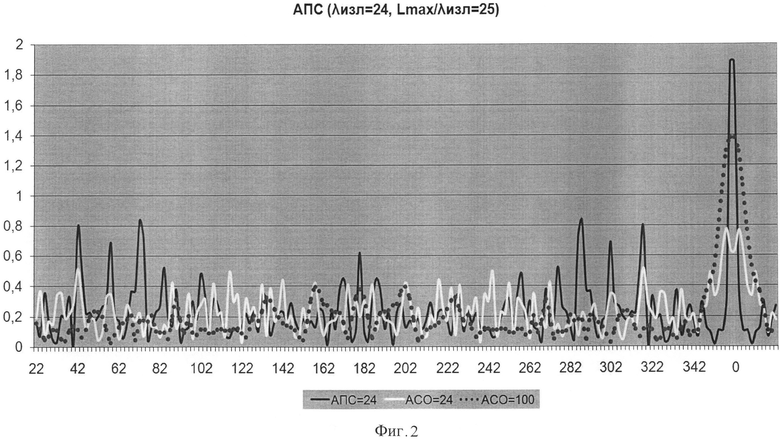
Три характеристики избирательности полученные на вычислительной модели с одинаковыми параметрами показаны на фигуре 2:
- При АПС дальность до TC равна 10000, λизл.=24, Lmax=600, k=25;
- Для АСО=24: λизл.=24, расстояние RTC=1740, k=25, φобз.=20 град.
- Для АСО=100: λизл.=100, RTC=1740, k=6, φобз.=20 град.
Из графика видно, что для разных частот при одинаковом расстоянии до ТС угол сектора обнаружения не меняется и составляет по уровню 0,4 - 20 град. Но за счет более дальнего распространения волн с большей длиной волны, что свойственно для волн любой физической природы, дальность обнаружения оказывается выше. Этим определяется необходимость применения в МРС ПЛ Антенн, позволяющих работать на существенно различающихся частотах, высоких для АПС и низких для АСО. Кроме того, отмеченное выше негативное действие задних лепестков ДН нейтрализуется, так как их ТС совпадает с ТС основных лепестков ЕАП.
Краткое описание чертежей
На фигуре 1 показана структурная схема организации потоков информации и вносимых контроллерами задержек. Величины задержек для наглядности показаны в виде протяженности линейных размеров регулируемых линий задержки (РЛЗ). Так как объект находится слева от плоской горизонтальной решетки, то наибольшая задержка для синхронизации до суммирования вносится в левые сигналы от приемников. На фигуре приняты сокращения: ПРМ - управляемый цифровой приемник, ЦК1…l-N - цифровой контроллер первого слоя контроллеров, ЦК2-1 - цифровой контроллер второго слоя контроллеров, МП - многопроцессорное вычислительное устройство; «3D - база данных» - динамически обновляемая структурированная база данных, содержащая информацию о координатах и других свойствах просканированных точек пространства. «Источником внешней подсветки» могут служить один или несколько внешних естественных или техногенных источника. Также могут восприниматься собственные излучения объекта, например, инфракрасное излучение, акустическое, виброакустическое излучение.
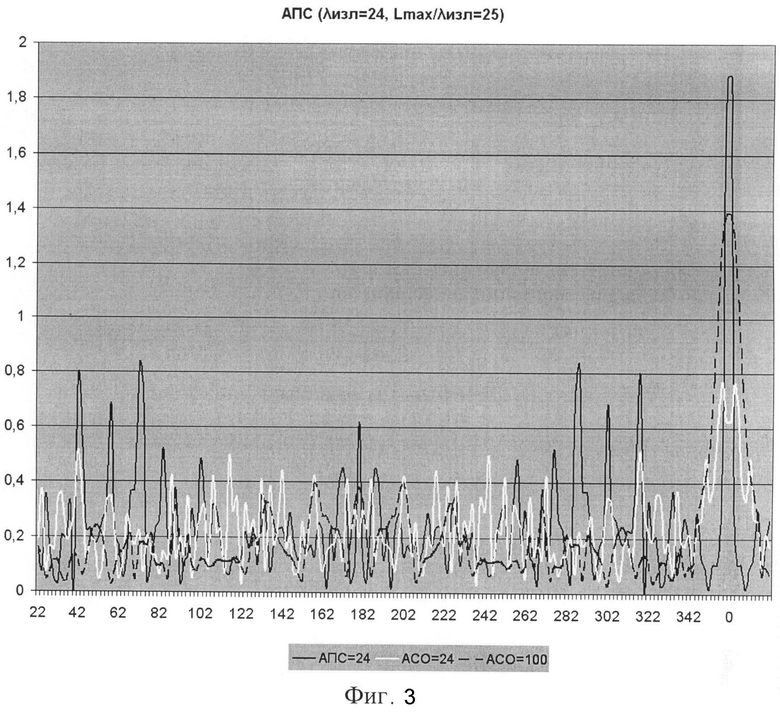
На фигуре 2 показаны три характеристики избирательности полученные на вычислительной модели с одинаковыми параметрами:
- При АПС дальность до ТС равна 10000, λизл.=24, Lmax=600, k=25;
- Для АСО=24: λизл.=24, расстояние RTC=1740, k=25, φобз.=20 град.
- Для АСО=100: λизл.=100, RTC=1740, k=6, φобз.=20 град.
Из графика видно, что для разных частот при одинаковом расстоянии до ТС угол обнаружения не меняется и составил по уровню 0,4-20 градусов. Но за счет более дальнего распространения волн с большей длиной волны дальность обнаружения оказывается выше. Этим определяется необходимость применения в МРС ПЛ Антенн, позволяющих работать на существенно различающихся частотах, высоких для АПС и низких для АСО.
Осуществление изобретения
Конструкция (аппаратная структура) МРС ПЛ в статическом состоянии, а также его работа подробно описана в предыдущем разделе описания и графически представлена на фигуре 1. Работа и режимы АПС и АСО, которые достаточны для достижения технического результата, также подробно описаны в предыдущем разделе и поясняются фигурой 2. При необходимости получения более точной объемной картины, в случае применения МРС ПЛ стационарного действия, когда невозможно применение методов синтезирования апертуры, используют две и более аналогичных структуры, разнесенных на расстояния, существенно превышающие линейные размеры их АП, и передающие информацию для обработки на единую суперЭВМ. Для понимания технических основ работоспособности заявленной системы необходимо остановиться кратко на сущности ПЗП и неравенства (9) из [6].
В ПЗП утверждается, что суммирование независимых случайных величин, каковыми являются помехи или шумы, приводит к изменению закона вероятности их распределения и в бесконечности (с ростом числа слагаемых) процесс перестает быть случайным. В противоположность помехам сигналы перед суммированием синхронизируются и случайными не являются, что приводит к линейному росту их суммы при увеличении числа слагаемых. Когда синхронизация сигналов нарушается, они также как и помехи претерпевают относительное затухание (относительно своего максимального отклонения). Полученная эмпирически «кривая затухания», определяющая скорость затухания, для случая с суммированием белого шума с большой точностью аппроксимируется выражением 
Физический смысл неравенства (9) из [6] поясняется явлением дифракции, когда на пути волны оказывается препятствие меньшее или сопоставимое по размерам с длиной волны, оно огибается волной без образования тени. И наоборот, когда препятствие существенно больше длины волны, за ним образуется область тени, которая вытянута вдоль направления движения волны. Наличие тени означает, что волна совершает некую работу. Эта работа при синхронизации и суммировании сигналов снятых с решетки превращается в рост сигнала и затухание помехи, так как при малых размерах решетки суммируемые сигналы помехи перестают быть случайными относительно друг друга, что в свою очередь не приводит к росту отношения сигнал-шум и равносильно отсутствию сигнала на фоне шума.
Литература
1. Чиркунова Ж.В. Автореферат диссертации на соискание ученой степени кандидата технических наук. - М., 2009 г. www.spurtm.ru>nauchdeyatelnost/chirkunova.pdf
2. Фазированная антенная решетка.
http://slovari.yandex.ru/~книги/БСЭ/Фазированная антенная решетка/
3. Фазированная антенная решетка.
http://ru.wikipedia.org/wiki/Фазированная_антеннаярешетка
4. Что такое АФАР. 11/26/836/
5. Материалы XVIII Международной научно-технической конференции «Радиолокация, навигация, связь»., 2012 г.,17-19 апреля 2012 года, -Воронеж. Алгоритм пространственной селекции. Попик П.И. (стр.478).
6. Заявка PCT/RU 2011/000296 от 27.04.2011, приоритет от 04.05.2010 г.
www.wipo.int/pctdb опубликовано под №WO 2011/145981
7. Инновационная деятельность в Вооруженных силах Российской Федерации: Труды всеармейской научно-практической конференции. 25-26 ноября 2010 года, - СПб.: ВАС, 2010-568 стр. Принцип затухания помехи. Попик П.И. (стр.373).
8. Сетчатка и строение ее слоев. http://www.sfe.ru/v_book_anat6.php
9. Зрительный нерв. Зрительный тракт. http://www.sfe.ru/v_book_anat7.php
10. Основы теории синтезированных апертур. http://www.tehnoinfa.ru/radiovidenie/3.html
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ УРОВНЯ (ОТНОШЕНИЯ) СИГНАЛ-ШУМ ПРИ ПРИМЕНЕНИИ "ПРИНЦИПА ЗАТУХАНИЯ ПОМЕХИ" | 2010 |
|
RU2491717C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ, ПЕРЕДАЧИ И ПРИЕМА ЧАСТОТНО-ВРЕМЕННОЙ МАТРИЦЫ ШУМОПОДОБНОГО СИГНАЛА | 2013 |
|
RU2544735C2 |
| ПЕЛЕНГАТОР ИСТОЧНИКОВ АКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1993 |
|
RU2048678C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 2016 |
|
RU2618520C1 |
| Способ помехозащищенного приема сигналов систем спутниковой связи | 2020 |
|
RU2738409C1 |
| Способ высокоточной пеленгации постановщика многократной ответно-импульсной помехи | 2020 |
|
RU2740296C1 |
| СПОСОБ МНОГОКАНАЛЬНОГО АДАПТИВНОГО ПРИЕМА РАДИОСИГНАЛОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2477551C1 |
| Система шумопеленгования гидроакустического комплекса подводной лодки | 2020 |
|
RU2735630C1 |
| Адаптивная антенная система для панорамного радиоприемника | 2018 |
|
RU2679486C1 |
| Многоканальное автоматизированное устройство для противодействия радиолокационной разведке | 2021 |
|
RU2777376C1 |
Изобретение относится к области радиолокации и гидролокации и предназначено для сканирования пространства, а также непрерывного слежения за статическими и динамическими характеристиками объектов посредством преобразования волн любой физической природы в электрические сигналы. Технический результат - повышение помехозащищенности и точности обнаружения принятых сигналов. Для этого многостанционная радиотехническая система пассивной локации (МРС ПЛ) состоит из структурированной антенной решетки и высокопроизводительной ЭВМ. Аналогом структуры решетки служит строение сетчатки глаза. Решетка состоит из активных ячеек, которые сгруппированы в единичные антенные поля (ЕАП), сигналы с которых поступают на котроллеры второго и, далее аналогично группируясь, в последующие слои, вплоть до входа в ЭВМ. В работе контроллеров и ЭВМ используют алгоритм пространственной селекции (АПС). Технический результат в работе МРС ПЛ обеспечивается размерами ЕАП, которые должны быть много больше рабочей длины волны, применением для достижения требуемой чувствительности принципа затухания помехи путем выбора числа ячеек решетки. Для резкого сокращения объема вычислений при сканировании в ЭВМ используют алгоритм секторного обнаружения, которым служит АПС с другим входным параметром. 9 з.п. ф-лы, 3 ил.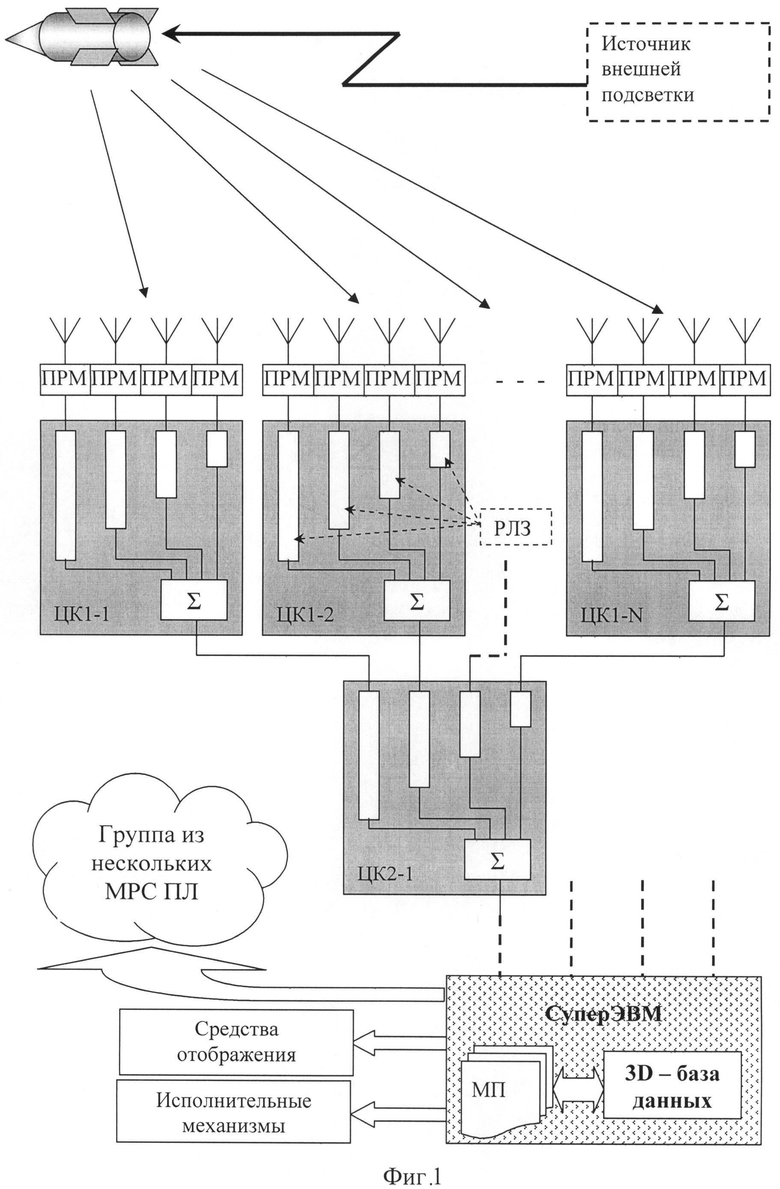
1. Устройство пассивной локации, предназначенное для сканирования пространства и относительного расположения объектов в нем посредством преобразования в электрические сигналы волн любой физической природы, работающее на внешней подсветке, включающее в себе цифровую антенную решетку, состоящую из ячеек, в каждой из которых находится управляемый широкополосный приемник, ко входу которого подключен преобразователь энергии волны в электрический сигнал и содержащий аналого-цифровой преобразователь, образуя тем самым антенное поле (АП) цифровой решетки; обработка принятых сигналов в таком радиотехническом устройстве ведется цифровыми процессорами, отличающееся тем, что:
a) ячейки цифровой антенной решетки разбиваются на группы, образующие единичные антенные поля (ЕАП), так чтобы их максимальные размеры были много больше максимальной длины волны основного рабочего диапазона частот всей системы, и далее обработка информации проводится послойно;
b) первым слоем являются управляемые приемники, оцифрованные сигналы с которых поступают на второй слой ЭВМ или контроллеров, в каждый из которых на входы поступают сигналы с одной из ЕАП, а с выхода после обработки алгоритмом пространственной селекции (АПС) единый сигнал поступает в следующий слой;
c) последним слоем служит быстродействующая ЭВМ, управляющая вышестоящими слоями и использующая в своей работе в качестве основного АПС, который заключается в формировании, кроме производимых вычислений в режиме реального времени, необходимого массива памяти для хранения и сдвига выборок сигналов, поступающих на входы, определения необходимых задержек для каждого канала ЕАП и/или вышестоящего слоя и выборки с их учетом из массива сигналов, которые далее суммируют в единый выходной сигнал; величины задержек вычисляют в каждом из контроллеров слоя и управляющей ЭВМ, исходя из значений пространственных координат центральных точек ЕАП первого слоя и точки сходимости (ТС) лучей ЕАП.
2. Устройство по п.1, отличающееся тем, что ячейки антенной решетки располагаются в трехмерном пространстве, и обработка принимаемых сигналов проводится с трехмерными величинами координат.
3. Устройство по п.1, отличающееся тем, что ЕАП могут перекрываться в пространстве, и иметь, в зависимости от расположения в едином АП, различную конфигурацию и размеры.
4. Устройство по п.1, отличающееся тем, что АП может содержать в своем составе ячейки, работающие в другом частотном диапазоне, необходимые для работы алгоритмов секторного обнаружения (АСО).
5. Устройство по п.1, отличающееся тем, что между первым и последним слоями может быть более одного слоя промежуточной обработки.
6. Устройство по п.1, отличающееся тем, что функция задержки и создание массива выборок, необходимого для ее получения, и предназначенная для синхронизации полезного сигнала перед суммированием, может быть аппаратно организована как в приемниках, так и в контроллерах второго слоя, в том числе, когда приемники и контроллер выполнены конструктивно в едином устройстве.
7. Устройство по п.1, отличающееся тем, что относительные координаты ЕАП задают при начальной инициализации всей системы и периодически обновляют по заданному алгоритму.
8. Устройство по п.1, отличающееся тем, что каналы для информации, передаваемой о размерах задержек вверх к ЕАП и суммарной вниз, могут быть структурированы по типу: для информации, предназначенной для АСО статических или динамических объектов; для информации, используемой АПС, о более детальных свойствах обнаруженных объектов (размерах, отражающей способности, направлению и скорости перемещения), и каналы для передачи командной информации.
9. Устройство по п.1, отличающееся тем, что в качестве АСО используют один и тот же АПС с учетом перемещения его ТС в ближнюю зону, расположенную от центра ЕАП на расстоянии одного порядка с его линейными размерами.
10. Устройство по п.1, отличающееся тем, что для обеспечения заданной чувствительности и помехозащищенности всей системы пассивной локации, вне зависимости от ее разрешающей способности, используют Принцип затухания помехи путем выбора необходимого числа ячеек решетки.
| СПОСОБ ПРОСТРАНСТВЕННОГО РАЗНЕСЕННОГО ПРИЕМА СИГНАЛА ОТ ИСТОЧНИКА ИЗЛУЧЕНИЯ, ПЕРЕДАННОГО ПО МНОГОЛУЧЕВОМУ КАНАЛУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2075832C1 |
| СПОСОБ ПОВЫШЕНИЯ УРОВНЯ (ОТНОШЕНИЯ) СИГНАЛ-ШУМ ПРИ ПРИМЕНЕНИИ "ПРИНЦИПА ЗАТУХАНИЯ ПОМЕХИ" | 2010 |
|
RU2491717C2 |
| Способ комплексной переработки природных фосфатов и щелочных глиноземсодержащих горных пород | 1952 |
|
SU95860A1 |
| Способ и печь для получения сульфида натрия из сульфата натрия | 1935 |
|
SU45915A1 |
| ПРЕОБРАЗОВАТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ ПРИЕМА/ПЕРЕДАЧИ УЛЬТРАЗВУКОВЫХ КОЛЕБАНИЙ В СРЕДЕ ЖИДКОГО НАТРИЯ, ПРИЕМНАЯ/ПЕРЕДАЮЩАЯ РЕШЕТКА, АНТЕННА, СПОСОБ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ И УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ В ОПТИЧЕСКИ НЕПРОЗРАЧНОЙ СРЕДЕ | 1997 |
|
RU2186408C2 |
| US 7545322 B1, 09.06.2009 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

