Изобретение относится к области контрольно-измерительной техники и предназначено, в частности, для измерения и предобработки текущей информации от датчиков значений параметров и характеристик объектов различной физической природы, в том числе в составе территориально распределенной информационно-измерительной системы (ИИС).
Известно техническое решение «Система интеллектуальной обработки данных командно-измерительного комплекса», патент RU 121613U1, G06F 12/00 (опубликовано 27.10.2012 г.), предназначенная для получения и обработки данных от группы объектов (орбитальных аппаратов) и содержащая центральный сервер и модули:
- приема данных с синхронизирующим и информационным входами;
- интеграции сигналов (формирования выборок текущей информации);
- модификации адресов записи и считывания данных;
- приема данных эталонных цифровых описаний объектов зондирования;
- селекции опорных адресов эталонных описаний;
- идентификации данных;
- управления выборкой базы знаний.
Недостатком этого решения является строгая функциональная и структурная специализация модулей, входящих в состав системы, сопрягаемых между собой и с центральным сервером. При этом база знаний используется только для управления данными (их выбором) эталонных цифровых описаний объектов зондирования.
Известно другое техническое решение «Автономная информационно-измерительная система», патент RU 109567 U1, G01R 17/02 (опубликовано 20.10.2011 г.), предназначенная для измерения и регистрации перегрузок, действующих на объект, и содержащая типовые для ИИС блоки согласующих устройств (датчиков) измерительных преобразователей, аналоговый коммутатор, аналогово-цифровой преобразователь (АЦП), перепрограммируемый процессор (контроллер), энергонезависимую память, источник питания.
Недостатком этой системы является отсутствие функциональной возможности по автоматизации реконфигурации связей в системе по командам от системы верхнего уровня. При этом возможно только программное изменение функционирования системы путем перепрограммирования «вручную» процессора.
Последнее из перечисленных выше технических решений наиболее близко к описываемому техническому решению в части использования типовых компонентов.
Техническая задача изобретения состоит в расширении функциональных возможностей автономного интеллектуального измерительного модуля.
Решение технической задачи заключается в том, что автономный интеллектуальный измерительный модуль содержит аналоговые датчики, аналоговый коммутатор, аналогово-цифровой преобразователь (АЦП), перепрограммируемый процессор, блок энергонезависимой памяти, источники питания, цифровые датчики, цифровой коммутатор, модем и блок аппаратно-программного реконфигурирования структурной и функциональной организации модуля, причем выходы цифровых датчиков подключены к соответствующим входам цифрового коммутатора, первый управляющий вход которого подключен к первому командному выходу перепрограммируемого процессора, второй управляющий вход цифрового коммутатора соединен с первым управляющим выходом блока аппаратно-программного реконфигурирования, выход цифрового коммутатора подключен к первому сигнальному входу перепрограммируемого процессора, второй командный выход которого подключен к первому управляющему входу аналогового коммутатора, второй управляющий вход которого соединен со вторым управляющим выходом блока аппаратно-программного реконфигурирования, информационная двунаправленная шина перепрограммируемого процессора подключена к первому сигнальному входу блока аппаратно-программного реконфигурирования, второй сигнальный вход (порт) которого соединен с сигнальным выходом блока энергонезависимой памяти и с первым сигнальным входом модема, сигнальная двунаправленная шина (порт) которого соединена с третьим сигнальным входом (портом) блока аппаратно-программного реконфигурирования, четвертый сигнальный вход которого соединен с сигнальным выходом блока источников питания, управляющий вход которого подключен к третьему управляющему выходу блока аппаратно-программного реконфигурирования.
Блок автономного интеллектуального измерительного модуля аппаратно-программного реконфигурирования содержит матричный процессор, блок базы знаний, содержащий, в свою очередь, память априорных ситуационных бинарных отношений и память (ОЗУ) текущих (оперативных) ситуационных отношений, память (ОЗУ) хранения текущих наборов достаточных статистик и логических заключений, память хранения априорного набора программных продуктов (программного обеспечения), блок модификации программ, причем выход (шина) памяти хранения текущих наборов достаточных статистик и логических заключений подключен к первому сигнальному входу (шине, порту) матричного процессора, первый сигнальный выход (порт) которого соединен с первым сигнальным входом памяти хранения априорного набора программных продуктов, второй сигнальный вход которой соединен с выходом (портом) блока модификации программ, первый сигнальный вход которого соединен с входом (портом) памяти хранения аппаратного набора программных продуктов, а второй сигнальный вход блока модификации программ соединен со вторым сигнальным входом (портом) матричного процессора, второй сигнальный вход которого параллельно подключен к выходам памяти блока базы знаний, управляющие входы которого подключены соответственно к третьему и четвертому командным входам матричного процессора, первый (шина «B») и второй (шина «A») командные выходы матричного процессора соответствуют шинам «B» и «A» автономного интеллектуального измерительного модуля, при этом шина «Е» сигнального входа памяти хранения текущих наборов достаточных статистик и логических заключений, двунаправленная шина «C» входа памяти хранения априорного набора программных продуктов, двунаправленная шина «D» третьего сигнального входа (порта) матричного процессора, пятый командный выход «G» матричного процессора и его управляющий вход «К» соответствуют внешним соединениям блока аппаратно-программного реконфигурирования автономного интеллектуального измерительного модуля.
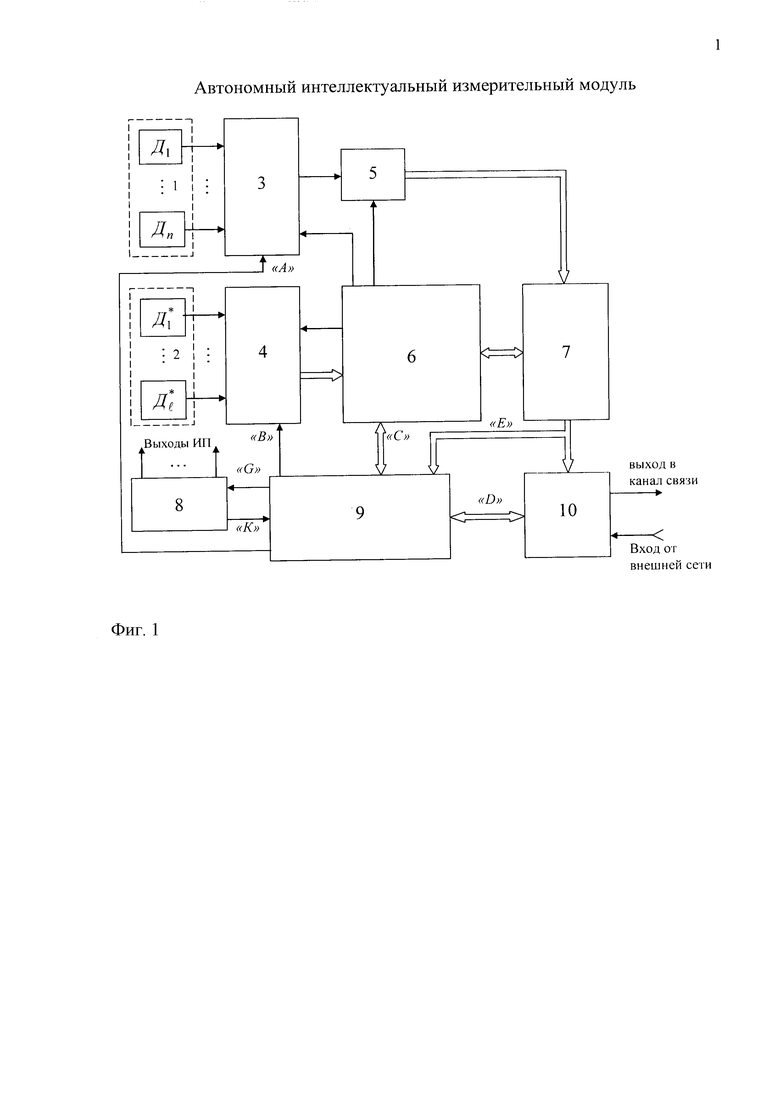
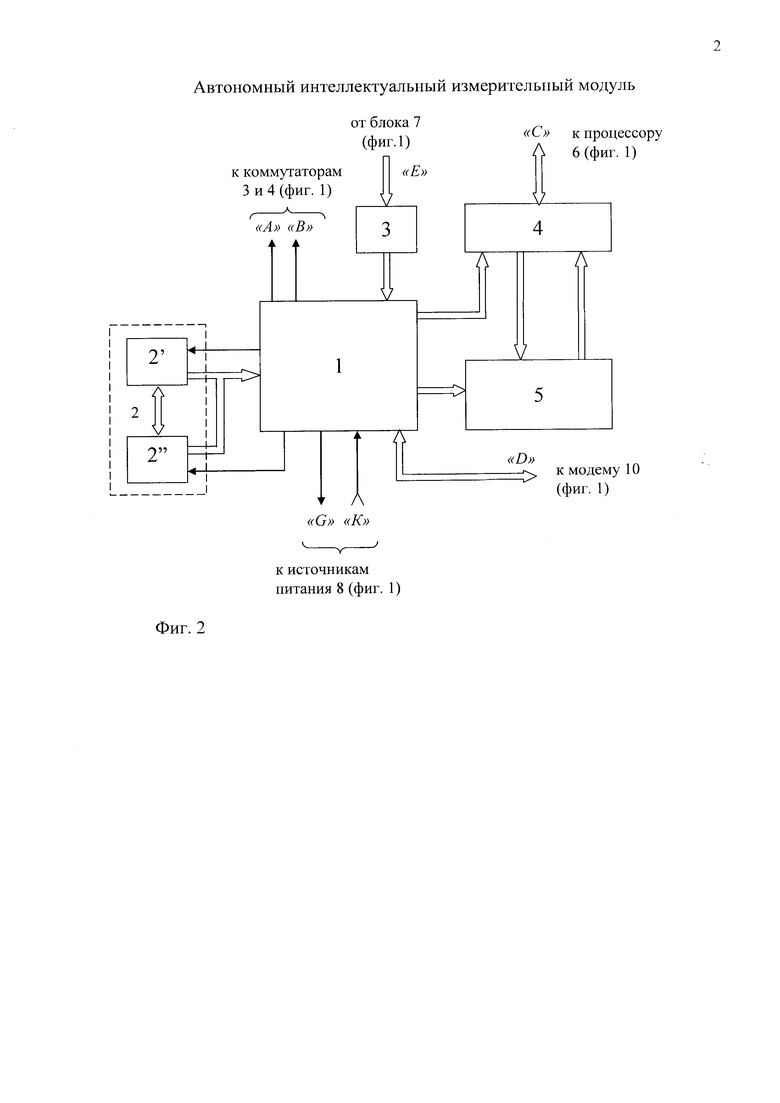
На фиг. 1 представлена структурная схема автономного интеллектуального измерительного модуля, на фиг. 2 приведена структурная схема блока аппаратно-программного реконфигурирования модуля.
В состав заявленного модуля входят (фиг. 1) аналоговые датчики 1, цифровые датчики 2, аналоговый коммутатор 3, цифровой коммутатор 4, АЦП 5, перепрограммируемый процессор 6, блок энергонезависимой памяти 7, источник питания 8, блок аппаратно-программного реконфигурирования 9 и модем 10.
Модуль работает следующим образом.
Аналоговые сигналы от аналоговых датчиков 1 и цифровые сигналы от цифровых датчиков, фиксирующих состояние контролируемого объекта или целенаправленного процесса (ЦНП), поступают соответственно на входы аналогового коммутатора 3 и цифрового коммутатора 4. Физически коммутаторы 3 и 4 могут быть построены на базе перепрограммируемых логических интегральных схем (ППЛИС), что позволяет управлять их конфигурацией и соответственно: количеством и порядком обслуживания информационных каналов, установления приоритетов согласно формулируемой извне текущей ситуацией, блокировки временно неинформативных каналов. Непосредственно коммутацией каналов управляет перепрограммируемый процессор 6 (далее - процессор). При этом i-й сигнал Si(tj) где tj - j-й момент времени приема и отсчета сигнала  с выхода аналогового коммутатора 3 поступает на вход АЦП 5, также управляемого процессором 6. АЦП 5 реализует операцию аналого-цифрового преобразования сигнала, т.е. получение его цифрового значения
с выхода аналогового коммутатора 3 поступает на вход АЦП 5, также управляемого процессором 6. АЦП 5 реализует операцию аналого-цифрового преобразования сигнала, т.е. получение его цифрового значения

где Ζ - реализует преобразование, т.е. цифровое значение сигнала Si, в момент tj; τИЗ - время, затрачиваемое АЦП 5 на оцифровку сигнала Si(tj); Еa - оператор аналого-цифрового преобразования временной функции Si(tj). По команде готовности от АЦП 5 процессор 6 реализует процедуру записи в энергонезависимую память 7 (далее - память) текущего значения Z(tj+τИЗ). За период наблюдения TH такой, что

в памяти 7 (ее выделенном для этой цели секторе) формируется выборка текущих цифровых значений сигнала Si. Если дисциплина обслуживания датчиков такова, что «первый пришел - первый обслужен», то для каждого Si объем выборки формируется, в общем случае, неравномерно, и по достижении нужного объема Ni соответственно i-й датчик временно выводится из цикла обслуживания, пока от других датчиков не получат выборки таких же (или априори заданных) объемов. Аналогично аналоговым датчикам 1 и аналоговому коммутатору 3 функционируют цифровые датчики 2 и цифровой коммутатор 4 с той разницей, что цифровые значения сигналов  с выхода коммутатора 4 по команде процессора 6 (при условии, что с управляющего выхода цифрового коммутатора 4 на соответствующий вход процессора 6 поступает команда «готовность») поступают непосредственно параллельно поразрядно (сигнальный выход коммутатора 4 выполнен в виде шины «цифровой порт») на вход памяти 7, где в соответствующем ее адресном секторе запоминаются и накапливаются в виде выборки {Z(tj)},
с выхода коммутатора 4 по команде процессора 6 (при условии, что с управляющего выхода цифрового коммутатора 4 на соответствующий вход процессора 6 поступает команда «готовность») поступают непосредственно параллельно поразрядно (сигнальный выход коммутатора 4 выполнен в виде шины «цифровой порт») на вход памяти 7, где в соответствующем ее адресном секторе запоминаются и накапливаются в виде выборки {Z(tj)},  .
.
В момент, когда необходимые объемы выборок Ζ получены, процессор в соответствии с действующей программой производит сортировку и сжатие полученной информации путем вычисления достаточных статистик (В.Г. Репин, Г.П. Тартаковский. «Статистический синтез при априорной неопределенности и адаптация информационных систем». М., «Сов. радио», 1977, С. 28-30, раздел 2.6 «Достаточные статистики»).
Понятие достаточной статистики характерно тем, что оптимальное правило сжатия текущей информации U - Z(S) оказывается зависящим не от всех наблюдаемых данных Si(tj) в выборке объемом N, особенно большой размерности, а от сравнительно небольшой совокупности величин, являющихся функцией от S(t) или S*(t). Это может быть отношение правдоподобия Λ(S) такое, что

где Pk(S) - плотность распределения для наблюдаемых данных в k-й ситуации,
Pk=P(a=k), a - параметр сигнала S(а).
Λkm является функцией S и в сжатом виде отображает всю необходимую для принятия решения (оценивания) информацию, содержащуюся в выборке Si(tj,а) объемом N. Подобным свойством обладают и другие достаточные статистики, такие как максимум апостериорной вероятности  являющийся оптимальной оценкой параметра a. Подобными же свойствами обладают выборочное среднее и выборочная медиана
являющийся оптимальной оценкой параметра a. Подобными же свойствами обладают выборочное среднее и выборочная медиана  использование того или иного правила в детерминированном случае предполагают применение конкретного неперестраиваемого алгоритма, реализуемого в программном продукте микропроцессора 6. В случае необходимости в адаптации функциональной организации блок аппаратно-программного реконфигурирования 9 по результатам принятия решений на предыдущих шагах tj формирует команду микропроцессору 6, по которой, в соответствии с j-й ситуацией, возникла потребность в смене алгоритма обработки данных или его коррекции. В этом случае реализуется процедура пошаговой адаптации для tj+1, tj+2 и далее до тех пор, пока потери оценивания и уровень сжатия информации окажутся в допустимых пределах, а сама достаточная статистика
использование того или иного правила в детерминированном случае предполагают применение конкретного неперестраиваемого алгоритма, реализуемого в программном продукте микропроцессора 6. В случае необходимости в адаптации функциональной организации блок аппаратно-программного реконфигурирования 9 по результатам принятия решений на предыдущих шагах tj формирует команду микропроцессору 6, по которой, в соответствии с j-й ситуацией, возникла потребность в смене алгоритма обработки данных или его коррекции. В этом случае реализуется процедура пошаговой адаптации для tj+1, tj+2 и далее до тех пор, пока потери оценивания и уровень сжатия информации окажутся в допустимых пределах, а сама достаточная статистика

где С - заданный порог.
Таким образом, реализуется основное предназначение автономного модуля (полезной модели), заключающееся в сортировке и сжатии текущей информации, поступающей от датчиков, с целью уменьшения размерности выходных данных Λ(S,N),  или других текущих результатов принятия решения (оценивания) на основе первичной обработки измерительной информации. Выходные данные процессор 6 передает также в соответствующий сектор памяти 7, откуда они согласно протоколу обмена с системой верхнего уровня (ядром ИИС, сервером) поступают на вход модема, осуществляющего передачу этих данных по выбранному каналу связи соответствующему пользователю в любой штатной ситуации. Ситуация здесь определяется как система понятий, на которой задано множество бинарных отношений. Для этого в блоке аппаратно-программного реконфигурирования априори сформирован массив простейших (базовых) понятий, через которые выражаются все остальные понятия множества ситуаций (Ю.И. Клыков. Ситуационное управление большими системами. М., «Энергия», 1974, 136 с.).
или других текущих результатов принятия решения (оценивания) на основе первичной обработки измерительной информации. Выходные данные процессор 6 передает также в соответствующий сектор памяти 7, откуда они согласно протоколу обмена с системой верхнего уровня (ядром ИИС, сервером) поступают на вход модема, осуществляющего передачу этих данных по выбранному каналу связи соответствующему пользователю в любой штатной ситуации. Ситуация здесь определяется как система понятий, на которой задано множество бинарных отношений. Для этого в блоке аппаратно-программного реконфигурирования априори сформирован массив простейших (базовых) понятий, через которые выражаются все остальные понятия множества ситуаций (Ю.И. Клыков. Ситуационное управление большими системами. М., «Энергия», 1974, 136 с.).
При передаче пользователю данных в виде достаточных статистик (вместо массивов объемом N для каждого из контролируемых параметров) радикально сокращается время связи с пользователем, появляется возможность введения допустимой избыточности для обеспечения требуемой достоверности и уровня защиты информации, уменьшается степень загрузки ядра ИИС (сервера) как внешней надсистемы, что, в конечном итоге, увеличивает ее ресурс и сокращает цикл вторичной обработки данных.
Если ИИС носит территориально распределенный характер, то автономные модули являются базовыми компонентами формирования первичного информационного поля, где сокращение времени общения верхнего и нижнего уровней ИИС, достоверность данных и удобство управления является доминирующими факторами.
В процессе работы автономного модуля и его взаимодействия с системой верхнего уровня (надсистемой) могут возникнуть штатные (т.е. предусмотренные реализацией общего алгоритма функционирования) и нештатные ситуации (т.е. свидетельствующие о заранее непредусмотренном течении контролируемого ЦНП или о непрогнозируемом на интервале наблюдения ΤH состояния подконтрольного объекта), требующие изменения структуры, связей или (и) программного продукта для корректировки или даже изменения функциональной и структурной организации автономного модуля.
В предлагаемом автономном модуле эта задача решается двумя путями:
1) по командам извне (от ядра ИИС, сервера), поступающим по каналу связи на сигнальный вход модема 10 (фиг. 1), а с его информационного выхода, выполненного как двунаправленная шина (фиг. 1), в блок программно-аппаратного реконфигурирования 9 (фиг. 1);
2) в результате сопоставления текущей информации, обработанной и сжатой процессором 6 (фиг. 1), и аппаратной базы знаний 2 (фиг. 2) в матричном процессоре 1 (фиг. 2) блока аппаратно-программного реконфигурирования 9 (фиг. 1).
Структурно блок аппаратно-программного реконфигурирования 9 (фиг. 1) содержит (фиг. 2):
- матричный процессор 1;
- базу знаний 2, состоящую из двух взаимосвязанных компонентов: памяти априорных ситуационных отношений 2′ и памяти текущих (оперативных) ситуационных отношений 2″;
- память (оперативное запоминающее устройство - ОЗУ) хранения текущих наборов достаточных статистик (решений) и логических заключений 3 (далее - ОЗУ 3);
- память хранения априорного набора программных продуктов (долговременное запоминающее устройство - ДЗУ) 4 (далее ДЗУ 4);
- блок модификации программ 5;
- шины внешних связей: «A» - с аналоговым коммутатором 3 (фиг. 1); «B» - с цифровым коммутатором 4 (фиг. 1); «C» - двунаправленная шина с процессором 6 (фиг. 1); «D» - двунаправленная шина связи с модемом 10 (фиг. 1); «E» - с памятью 7 (фиг. 1).
Блок аппаратно-программного реконфигурирования 9 (фиг. 1, далее блок реконфигурирования 9) функционирует следующим образом.
При отсутствии внешних команд и модема 10 (фиг. 1) реализуется процедура сопоставления текущей сжатой информации (набора достаточных статистик Ζ и логических заключений Ζ*), доставляемой по командам процессора 6 (фиг. 1, шина «C») из соответствующего сектора памяти 7 (фиг. 1) в ОЗУ 3 (фиг. 2, шина «E»), с данными базы знаний 2 (фиг. 2), а именно: с данными памяти априорных ситуационных отношений 2′ (фиг. 2).
База знаний 2 (фиг. 2) имеет фреймовую организацию (М. Минский. Фреймы для представления знаний. М., «Энергия», 1979, 151 с.), где под фреймом понимается минимально необходимая структурированная информация, однозначно определяющая конкретную ситуацию, а в сложных случаях - класс (тип, вид) ситуации в виде бинарных отношений, заложенных в базе данных матричного процессора 1 (фиг. 2). Процессор 1 (фиг. 2) имеет традиционную матричную организацию (структуру: М.И. Соболевский. Анализ и оптимизация структур матричных вычислительных систем. М., «Энергия», 1979, 168 с.). Это позволяет:
- выполнить описание ситуаций как матричное отображение бинарных отношений: для каждой ситуации выделен матричный элемент процессора 1 (фиг. 2);
- обеспечить высокое быстродействие по идентификации текущих данных с конкретной ситуацией за счет параллельных вычислений;
- оптимизировать маршрут отождествления стереотипной ситуации, идентифицируемой в процессоре 1 (фиг. 2), с соответствующим фреймовым представлением;
- в случае определения процессором 1 (фиг. 2) нештатной (нераспознаваемой как типовая) ситуации с помощью фреймовых описаний (в базе знаний) из памяти 2′ (фиг. 2) подобрать или приспособить наилучший из отображенных фреймов к реальной нештатной ситуации и применить этот фрейм в дальнейшем для принятия решения матричным процессором 1 (фиг. 2).
Этим решением могут быть:
- команды по шинам внешних связей с коммутаторами «А» или (и) «В» для структурной реконфигурации коммутаторов 1 и 2 соответственно (фиг. 1): изменение числа каналов, установление новых приоритетов и дисциплины обслуживания, блокирования отдельных каналов (например, при выяснении неисправности датчика);
- команда для извлечения из блока памяти хранения априорных наборов программных продуктов 4 (фиг. 2) нового, более подходящего для данной ситуации программного продукта с целью перепрограммирования процессора 6 (фиг. 1);
- команда для запуска блока модификации программ с целью коррекции программы путем использования типовых программных файлов, хранящихся также в блоке 4 (фиг. 2);
- команда формирования данных для новой (прогнозируемой) ситуации в памяти оперативных текущих ситуационных отношений 2″ (фиг. 2) при использовании априорных фреймовых описаний из памяти 2′ (фиг. 2).
Матричный процессор физически построен, как и другие компоненты автономного модуля, на базе ППЛИС и может быть сконфигурирован под конкретное применение автономного модуля.
При наличии внешних команд (от ядра ИИС, сервера) согласно их предписаниям матричный процессор 1 (фиг. 2) выполняет принудительную структурную и функциональную реконфигурацию автономного модуля под решение задач первичной обработки информации согласно командам надсистемы (пользователя).
В критических ситуациях автономный модуль (его матричный процессор) формирует через модем самостоятельно управляющие команды для подконтрольных ЦНП и объектов, информируя об этом пользователя и контролируя результаты воздействия через датчики 1 и 2 (фиг. 1).
Предлагаемый автономный интеллектуальный модуль ввиду широких функциональных возможностей и возможности адаптации к конкретной ситуации и решаемой задаче может быть использован:
1) как элемент нижнего уровня территориально распределенной ИИС, в особенности, когда число входных переменных достигает сотен и даже тысяч (объекты ЦНП теплоэнергетических отраслей, экологические и сейсмические информационные сети);
2) как базовый компонент в составе ИИС различного назначения (автоматизированное рабочее место оператора: врача, диспетчера, транспортника, контролера сети массового обслуживания);
3) как необслуживаемый дистанционно управляемый информационный пост (пожароохранные системы, управление территориально удаленным технологическим процессом, информационное оснащение беспилотных аппаратов, буев).
Поскольку все компоненты автономного модуля могут быть построены с использованием общедоступной элементной базы (в том числе ППЛИС, энергонезависимая память, серийно выпускаемые перепрограммируемые процессоры, аналоговые и цифровые схемы), то его серийное изготовление, эксплуатация и модернизация не вызывают технологических затруднений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕНЯЕМЫЙ ПОЛЕВОЙ ПРИБОР ДЛЯ АВТОМАТИЗАЦИИ ПРОЦЕССОВ | 2003 |
|
RU2327113C2 |
| ПЕРЕНОСНОЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2340926C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| ПЕРЕПРОГРАММИРУЕМЫЙ ВЫЧИСЛИТЕЛЬ ДЛЯ СИСТЕМ ОБРАБОТКИ ИНФОРМАЦИИ | 1998 |
|
RU2146389C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2399088C2 |
| Интеллектуальный счетчик электрической энергии | 2021 |
|
RU2786977C2 |
| УНИФИЦИРОВАННЫЙ МОДУЛЬ ИНТЕГРАЦИИ ОБЪЕКТОВЫХ КОМПЛЕКСОВ ТЕХНИЧЕСКИХ СРЕДСТВ ОХРАНЫ В ИНТЕГРИРОВАННУЮ СИСТЕМУ ТРАНСПОРТНОЙ БЕЗОПАСНОСТИ | 2010 |
|
RU2436166C1 |
| СИСТЕМА ДИСТАНЦИОННОГО РАДИАЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ОБЪЕКТА | 1999 |
|
RU2182343C2 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2009 |
|
RU2402807C1 |
| ПЕРЕНОСНОЙ ПРОГРАММНО-ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2363975C2 |
Изобретение относится к области контрольно-измерительной техники. Технический результат заключается в повышении скорости обработки данных. Автономный интеллектуальный измерительный модуль содержит аналоговые датчики, аналоговый коммутатор, аналогово-цифровой преобразователь (АЦП), перепрограммируемый процессор, блок энергонезависимой памяти, источники питания, цифровые датчики, цифровой коммутатор, модем и блок аппаратно-программного реконфигурирования структурной и функциональной организации модуля. 2 н.п. ф-лы, 2 ил.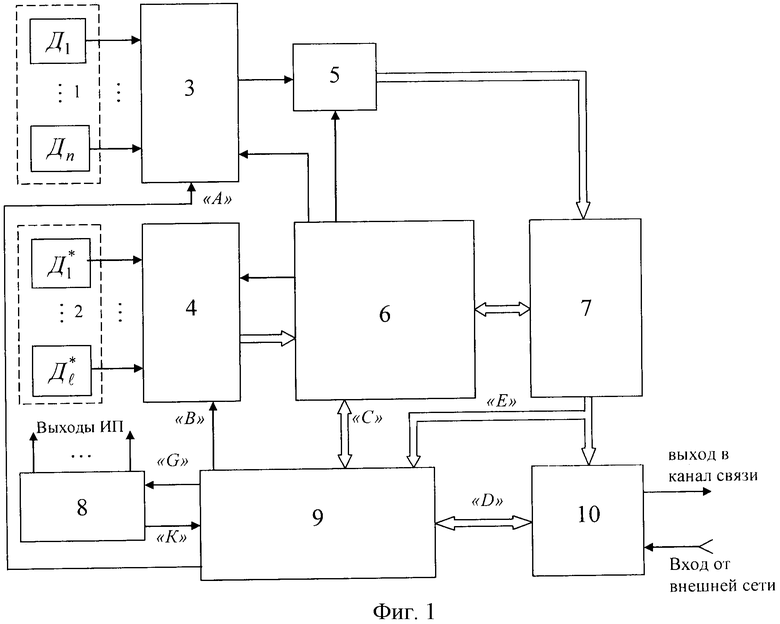
1. Автономный интеллектуальный измерительный модуль, содержащий аналоговые датчики, аналоговый коммутатор, аналогово-цифровой преобразователь (АЦП), перепрограммируемый процессор, блок энергонезависимой памяти, источники питания, цифровые датчики, цифровой коммутатор, модем и блок аппаратно-программного реконфигурирования структурной и функциональной организации модуля, причем выходы цифровых датчиков подключены к соответствующим входам цифрового коммутатора, первый управляющий вход которого подключен к первому командному выходу перепрограммируемого процессора, второй управляющий вход цифрового коммутатора соединен с первым управляющим выходом блока аппаратно-программного реконфигурирования, выход цифрового коммутатора подключен к первому сигнальному входу перепрограммируемого процессора, второй командный выход которого подключен к первому управляющему входу аналогового коммутатора, второй управляющий вход которого соединен со вторым управляющим выходом блока аппаратно-программного реконфигурирования, информационная двунаправленная шина перепрограммируемого процессора подключена к первому сигнальному входу блока аппаратно-программного реконфигурирования, второй сигнальный вход которого соединен с сигнальным выходом блока энергонезависимой памяти и с первым сигнальным входом модема, сигнальная двунаправленная шина которого соединена с третьим сигнальным входом блока аппаратно-программного реконфигурирования, четвертый сигнальный вход которого соединен с сигнальным выходом блока источников питания, управляющий вход которого подключен к третьему управляющему выходу блока аппаратно-программного реконфигурирования.
2. Блок автономного интеллектуального измерительного модуля аппаратно-программного реконфигурирования содержит матричный процессор, блок базы знаний, содержащий, в свою очередь, память априорных ситуационных бинарных отношений и оперативную память текущих ситуационных отношений, память хранения текущих наборов достаточных статистик и логических заключений, память хранения априорного набора программных продуктов (программного обеспечения), блок модификации программ, причем выход памяти хранения текущих наборов достаточных статистик и логических заключений подключен к первому сигнальному входу матричного процессора, первый сигнальный выход которого соединен с первым сигнальным входом памяти хранения априорного набора программных продуктов, второй сигнальный вход которой соединен с выходом блока модификации программ, первый сигнальный вход которого соединен с входом памяти хранения аппаратного набора программных продуктов, а второй сигнальный вход блока модификации программ соединен со вторым сигнальным входом (портом) матричного процессора, второй сигнальный вход которого параллельно подключен к выходам памяти блока базы знаний, управляющие входы которого подключены соответственно к третьему и четвертому командным входам матричного процессора.
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Сепаратор-пеногаситель для масла | 1953 |
|
SU109567A1 |
| Камышеуборочная машина | 1958 |
|
SU121613A1 |

