Изобретение относится к геофизическому приборостроению, а именно к гравитационным градиентометрам, и предназначено для повышения точности гравитационных градиентометров и эксплуатационных характеристик.
Известны градиентометры [1], в которых разности гравитационных сил, приложенных к массам гантели (диполя), противодействует сила закручивания упругой нити. Эту силу вычисляют по измеряемому оптическими средствами углу поворота гантели относительно корпуса прибора. Недостатком таких градиентометров является необходимость установки гантели в несколько азимутальных положений для определения величины и направления изменения градиента. Вторым недостатком является длительное время измерения, определяемое малой жесткостью подвеса и малыми демпфирующими силами трения о воздух.
Второго недостатка лишены градиентометры [2], в которых диполь в вакууме устанавливается на неконтактный безмоментный подвес. Гравитационным силам противодействуют электрические силы, создаваемые следящей системой обратной связи, состоящей из датчика угла (емкостного датчика перемещений), усилителя и датчика момента (электростатического датчика силы). Обратная связь сохраняет постоянное положение гантели относительно корпуса. Градиент вычисляют по изменению параметров системы (емкости, тока или напряжения), возникающих при воздействии гравитационных сил.
Для исключения периодической перестановки гантели в азимуте вводится непрерывное вращение двух взаимно перпендикулярных гантелей - квадруполя [3]. В градиентометрах с квадруполем измеряют разность гравитационных сил, действующих на диполи. Недостатком известных систем является измерение указанной разности через измерение сил относительно корпуса и их последующее вычитание. В этом случае корпус является излишней паразитной базой измерений. Вторым недостатком является связь гантелей с корпусом с помощью микроскопически тонких растяжек, снижающих помехоустойчивость прибора на подвижном объекте. Через растяжки практически невозможно передавать вращающий момент при раскручивании квадруполя, приходится вращать промежуточный корпус, который прикладывают момент непосредственно к гантелям, что приводит к появлению ошибок, связанных с не идентичностью сил, действующих на них. Электрические наводки, создаваемые силовым полем двигателя, не исчезают и на выбеге и приводят к дополнительным погрешностям.
Целью изобретения является исключение промежуточных элементов, обеспечивающих измерения и вращение, повышение жесткости конструкции квадруполя и снижение уровня помех.
Эта цель достигается тем, что в градиентометре квадруполь отделен от привода вращения. Квадруполь выполнен в виде центрального вала, к которому на радиально расположенных ленточных пружинах присоединены гантели. Между стержнями гантелей и валом имеется зазор, и вращение вала передается гантелям через пружины. К концам гантелей тангенциально прикреплены легкие консоли так, что между консолями, принадлежащими разным гантелям, оставлены промежутки. В промежутки установлены датчики перемещений, выполненные в виде в виде зонда и подложки туннельного микроскопа. При измерении вертикального градиента в зазоры между валом и гантелями вставляются подшипники с малыми моментами сухого трения. Привод вращения состоит из подшипника, двигателя, датчика угла и шпинделя, соединяемого с центральным валом квадруполя, а между приводом и квадруполем установлен металлический экран.
Технический эффект заключается в повышении точности и помехоустойчивости градиентометра.
Устройство градиентометра приведено на схемах Фиг. 1, Фиг. 2 и Фиг. 3.
На Фиг. 1 изображены: 1 - центральный вал градиентометра, 2-5 - ленточные пружины, 6 - стержень гантели с пробными массами 7 и 8, 9 - стержень гантели с пробными массами 10 и 11, 12 - зазор между гантелями и валом, 13-20 - дуговые консоли, 21-24 - блоки следящих систем обратной связи, 30 - вычислитель.
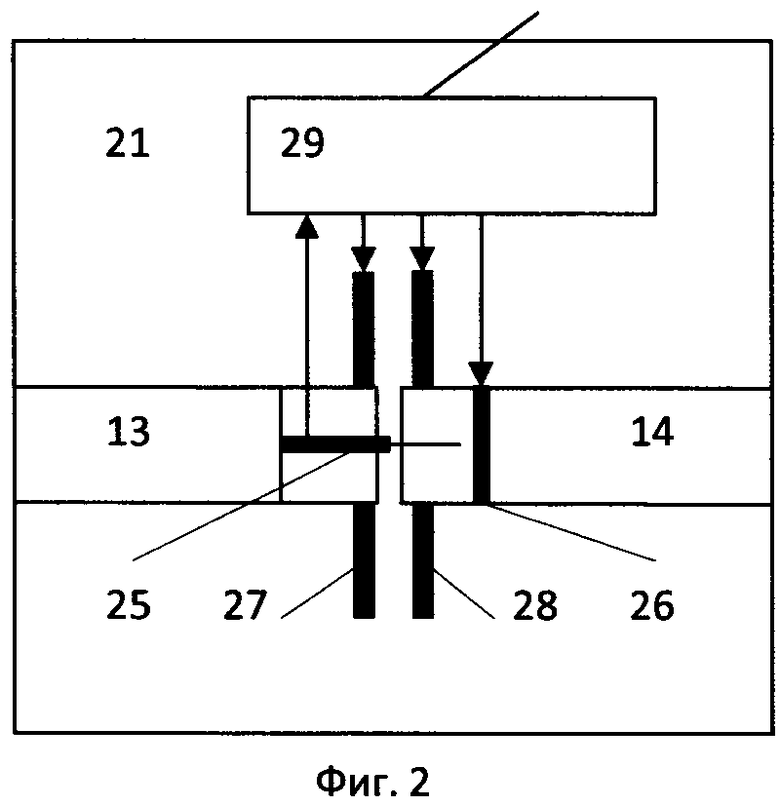
На Фиг. 2 раскрыт один из блоков обратной связи, а именно блок 21: 25, 26 - зонд и подложка туннельного микроскопа, 27, 28 - ротор и статор датчика силы, 29 - усилитель.
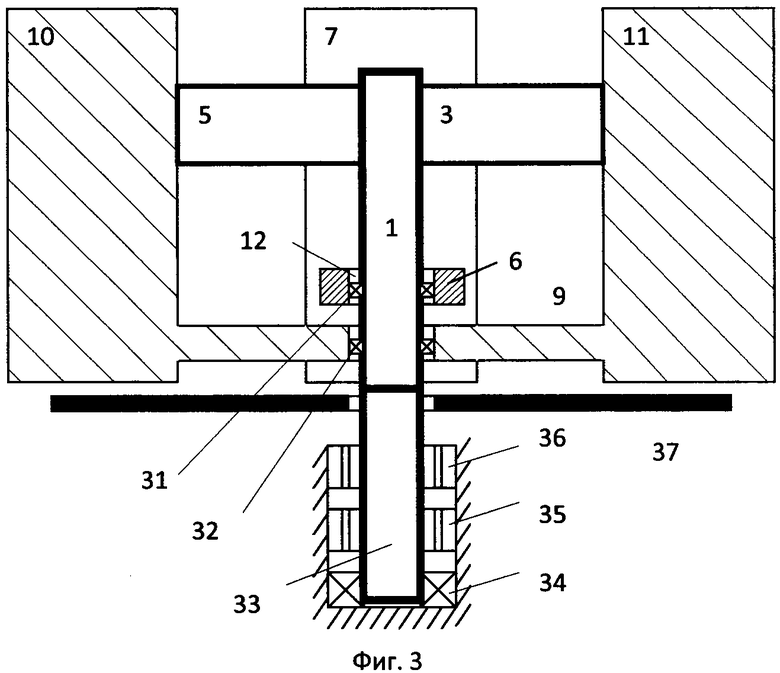
На Фиг. 3 приведен схематический разрез градиентометра вдоль одной пары пружин. На Фиг. 3 изображены: 31, 32 - подшипники в зазорах между валом и стержнями гантелей, 33 - шпиндель привода вращения, 34 - подшипник привода вращения, 35 - датчик угла поворота шпинделя, 36 - двигатель привода вращения, 37 - экран.
К валу 1 с помощью, например, плоских ленточных пружин 2-5 присоединены пробные массы 7, 8, 10, 11 гантелей со стержнями 6 и 9. Гантели посажены на вал с зазором 12 так, что связь гантелей между собой и с валом реализуется только через пружины. К массам гантелей приварены консоли 13-20 в виде дуг, изготовленных из легкого сплава. Между свободными концами консолей установлены блоки следящих систем 21-24. Блоки содержат датчики перемещений, выполненные в виде зонда 25 и подложки 26 туннельного микроскопа, датчики силы, например, электростатические с обкладками 27, 28 и усилители 29. Все усилители соединены с вычислителем 30. При измерении вертикального градиента в зазоры между валом и гантелями устанавливаются подшипники 31, 32. Шпиндель привода вращения 33 крепится в подшипнике 34. Угол поворота шпинделя определяется датчиком угла 35, а скорость задается двигателем 36. Для снижения влияния электромагнитных полей на следящую систему сохранения зазора между консолями используется размещенный между приводом и квадруполем экран 37.
Известно [4], что туннельный микроскоп отслеживает рельеф поверхности, используя в качестве датчика перемещений металлический зонд и проводящую подложку, между которыми приложено напряжение приблизительно 1 В. При сближении зонда и подложки на расстояние менее 10 Å между ними возникает туннельный ток J, экспоненциально зависящий от зазора L[Å]
I=I0e-2L,
где I0 - начальный ток. Точность удержания зазора в туннельном микроскопе [4] ΔL=0.01 Å. Так как в технических приложениях на предельные точности обычно не ориентируются, то примем ΔL=0.02 Å=2*10-12 м. При уменьшении зазора на ΔL=0.02 Å туннельный ток увеличится на 4%. Такого изменения вполне достаточно, чтобы преодолеть шумовые помехи электроники.
Механическая часть градиентометра представляет систему, собственные колебания которой описываемую в первом приближении уравнением

где В - динамический момент инерции, С - жесткость пружины,  - ускорение и угол поворота.
- ускорение и угол поворота.
Квадрат собственной частоты крутильных колебаний системы определится выражением  где W - минимальное ускорение, которое необходимо измерить. Если принять, что расстояние между массами гантели равно 0,1 м, а минимальный градиент 1 Э=10-9 с-2, то ускорение W=10-10 м*с-2. Емкостные, индукционные и оптические датчики перемещений имеют разрешающую способность порядка половины длины световой волны ΔL=2*10-7 м, и этим определяется частота собственных колебаний механической части градиентометров с такими датчиками, приведенная в таблице. В последней строке таблицы записаны частоты и период собственных колебаний механической системы, удерживающей гантели от смещения под действием своего веса в случае, если квадруполь вращается в горизонтальной плоскости.
где W - минимальное ускорение, которое необходимо измерить. Если принять, что расстояние между массами гантели равно 0,1 м, а минимальный градиент 1 Э=10-9 с-2, то ускорение W=10-10 м*с-2. Емкостные, индукционные и оптические датчики перемещений имеют разрешающую способность порядка половины длины световой волны ΔL=2*10-7 м, и этим определяется частота собственных колебаний механической части градиентометров с такими датчиками, приведенная в таблице. В последней строке таблицы записаны частоты и период собственных колебаний механической системы, удерживающей гантели от смещения под действием своего веса в случае, если квадруполь вращается в горизонтальной плоскости.
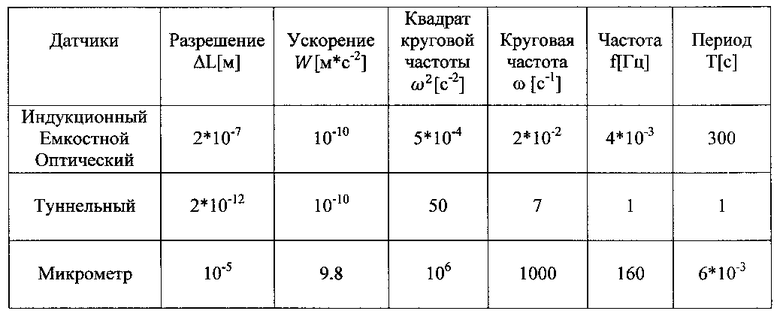
Из таблицы видно, что частота крутильных колебаний квадруполя с туннельными датчиками будет в 300 раз выше частоты колебаний квадруполя с другими датчиками.
Примем сечение пружинной ленты прямоугольным. В нем отношение момента инерции относительно горизонтальной оси Jг к моменту относительно вертикальной оси Jв определяется соотношением  где h и b - высота и ширина ленты. Примем также, что требуемые жесткости на изгиб пропорциональны моментам инерции и квадратам угловых частот. Вычислим отношение квадратов высоты ленты к ее толщине
где h и b - высота и ширина ленты. Примем также, что требуемые жесткости на изгиб пропорциональны моментам инерции и квадратам угловых частот. Вычислим отношение квадратов высоты ленты к ее толщине  Реализация такой ленты возможна, если, например, взять b=0,1 мм, а высоту h=1,5 см.
Реализация такой ленты возможна, если, например, взять b=0,1 мм, а высоту h=1,5 см.
Градиентометр работает следующим образом. При сообщении валу 1 через шпиндель 33 скорости вращении с частотой Ω в движение пружинами 2-5 вовлекаются гантели со стержнями 6 и 9. В установившемся режиме, например на выбеге в вакууме, в равномерном гравитационном поле квадруполь вращается как единое целое, и взаимное положение гантелей не изменяется. Если же поле неравномерно, то к гантелям будет прикладываться сила, стремящаяся развернуть их относительно друг друга. Если эта сила изменит положение гантелей на величину, превышающую порог чувствительности датчика перемещений, то обратная связь приведет зазор в начальное положение, а сигнал об этом поступит в вычислитель 30. В вычислителе будет выделен полезный гармонический сигнал на частоте 2Ω. Амплитуда этого сигнала будет зависеть от величины градиента, а фаза - от направления изолинии градиента, определяемого с помощью датчика угла 35. Так как двигатель 36 может обладать значительным электромагнитным полем, то для снижения его влияния на туннельный датчик перемещений предусмотрен экран 37. При измерении вертикального градиента гантели квадруполя будут стремиться лечь на вал. Чтобы это предотвратить, необходимо либо значительно увеличивать мощность следящих систем, что может привести к потере точности измерений, либо устанавливать подшипники 31, 32 в зазоры между валом и стержнями гантелей, что скажется на точности в меньшей мере. В качестве маломоментных подшипников могут быть использованы магнитные, электростатические или жидкостные подвесы.
При работе на подвижном объекте из-за угловых и линейных ускорений последнего возникнут помехи, связанные с изменением скорости вращения вала и действием инерционных сил на гантели. Однако они будут проявляться на частотах, отличающихся от 2Ω, и могут быть отфильтрованы.
Литература
1. Грушинский Н.В. «Основы гравиметрии». М.: Наука. 1983.
2. Патент РФ №2172967, 2001.08.27. «Гравитационный вариометр».
3. Патент US №20122222481, 2012.09.16. «Квадрупольный ответчик для гравитационных градиентометров OQR».
4. Миронов В.Л. «Основы сканирующей зондовой микроскопии». РАН. Институт физики микроструктур. Нижний Новгород. 2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 2015 |
|
RU2578247C1 |
| Комплекс для измерения абсолютного значения ускорения силы тяжести на подвижном основании | 2019 |
|
RU2705926C1 |
| Прямой преобразователь перемещений для микромеханических приборов (датчик перемещений) | 2019 |
|
RU2713964C1 |
| Гироскоп с вращающейся камерой | 2020 |
|
RU2732789C1 |
| ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 2019 |
|
RU2724588C1 |
| Способ измерения на движущемся объекте абсолютного значения силы тяжести и гравиметры для его осуществления | 2018 |
|
RU2683117C1 |
| ГРАДИЕНТОМЕТР СИЛЫ ТЯЖЕСТИ | 1991 |
|
RU2043644C1 |
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2000 |
|
RU2172967C1 |
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2010 |
|
RU2438151C1 |
| Интерферометр абсолютного гравиметра | 2017 |
|
RU2663542C1 |
Изобретение относится к геофизическому приборостроению, а именно к гравитационным градиентометрам. Гравитационный градиентометр содержит квадруполь с изготовленными в виде стержня и пробных масс гантелями, следящие системы с датчиками перемещений и привод вращения со шпинделем, при этом квадруполь выполнен в виде центрального вала, к которому на радиально расположенных ленточных пружинах присоединены гантели так, что между стержнями гантелей и валом имеются зазоры, на концах гантелей тангенциально установлены легкие консоли, между прикрепленными к разным гантелям консолями оставлены промежутки, в которые установлены датчики перемещений в виде зондов и подложек туннельных микроскопов, центральный вал квадруполя соединен со шпинделем привода вращения, а между приводом и квадруполем установлен металлический экран. Технический результат - повышение точности и помехоустройчивости градиентометра. 1 з.п. ф-лы, 1 табл., 3 ил.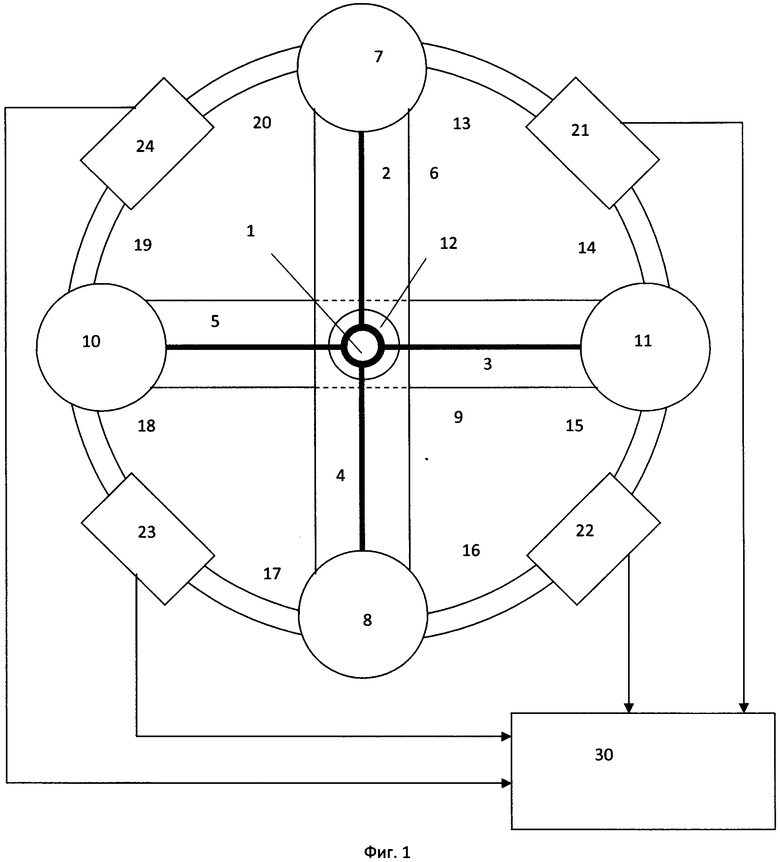
1. Гравитационный градиентометр, содержащий квадруполь с изготовленными в виде стержня и пробных масс гантелями, следящие системы с датчиками перемещений и привод вращения со шпинделем, отличающийся тем, что квадруполь выполнен в виде центрального вала, к которому на радиально расположенных ленточных пружинах присоединены гантели так, что между стержнями гантелей и валом имеются зазоры, на концах гантелей тангенциально установлены легкие консоли, между прикрепленными к разным гантелям консолями оставлены промежутки, в которые установлены датчики перемещений в виде зондов и подложек туннельных микроскопов, центральный вал квадруполя соединен со шпинделем привода вращения, а между приводом и квадруполем установлен металлический экран.
2. Градиентометр по п. 1, отличающийся тем, что в зазор между валом и стержнем каждой гантели установлен подшипник.
| ГРАВИТАЦИОННЫЙ ГРАДИОМЕТР С ТОРСИОННЫМИ СТЕРЖНЯМИ ИЗГИБА | 2009 |
|
RU2539093C2 |
| WO 2014007848 A1, 09.01.2014 | |||
| US 20120210783 A1, 23.08.2012 | |||
| Приспособление к токарному станку для расточки цилиндров и нарезки внутренней резьбы | 1919 |
|
SU12274A1 |

