Изобретение относится к измерительной технике и может быть использовано на микроспутниках и космических станциях для измерений параметров гравитационного поля Земли.
Известен гравитационный градиентометр, содержащий квадруполь с изготовленными в виде стержня и пробных масс гантелиями, следящие системы с датчиками перемещений и привод вращения со шпинделем /RU: 2577550/.
Недостатком аналога является его сложность и дороговизна.
Известен гравитационный градиентометр, принятый за прототип, содержащий цилиндрический герметичный корпус, механоэлектрический преобразовательный элемент и инерционную массу, расположенную в корпусе, а также электронный блок, соединенный входами с выходами преобразовательных элементов /RU: 2.046380/.
В прототипе имеется два акселерометра, заключенные в корпус, при этом каждый акселерометр включает чувствительную массу с упруго закрепленной инертной массой, а ось чувствительности акселерометров направлены вдоль одной оси.
Недостатком прототипа является его сложность, связанная с наличием акселерометров и наличием множества механических связей в приборе и как следствие этого недостаточная его чувствительность.
Техническим результатом, получаемым от внедрения изобретения, является упрощение гравитационного градиентометра (ГГ) и повышение его чувствительности.
Данный технический результат достигают за счет того, что известный гравитационный градиентометр, содержащий цилиндрический герметичный корпус, механоэлектрический преобразовательный элемент и инерционную массу, расположенную в корпусе, а также электронный блок, соединенный входами и выходами преобразовательных элементов дополнительно содержит компенсатор давления, установленный в центральной части корпуса, при этом механоэлектрический преобразовательный элемент выполнен в виде двух гидрофонов, установленных на торцах цилиндрического корпуса, а в качестве инерционной массы используют жидкость, заполняющую герметичный корпус.
В качестве жидкой инерционной массы применяется дистиллированная вода или ртуть.
Электронный блок выполнен в виде двух усилителей, один из которых - с регулируемым усилением, и сумматора, при этом выходы механоэлектрического преобразователя соединены с входами усилителей, подключенных выходами к входам сумматора.
Изобретение поясняется чертежами: на фиг. 1 представлена конструктивная, а на фиг. 2 - электронная схема прибора.
ГГ в виде высокочувствительный дифференциальный акселерометр выполнен в виде жесткого цилиндрического герметичного корпуса 1, внутри которого на торцах 2, 3 прикреплены механоэлектричекие преобразовательные элементы в виде датчиков микродавлений (гидрофонов), при этом внутренняя полость корпуса заполнена жидкостью 4, выполняющей роль инерционной массы ГГ, причем в центральной части корпуса 1 размещен компенсатор 5, уравнивающий внешнее в внутреннее давление.
ГГ с жидкостной инерционной массой является аналогом дифференциального акселерометра с инерционной массой в виде груза. Отличие состоит лишь в виде физического воздействия на механоэлектрический предобразовательный элемент (давление и сила) и типе преобразовательного элемента (преобразователь микродавлений- гидрофон или биморфный преобразователь изгибных деформаций - преобразователь микроускорений).
Расчитаем возможные тактико-технические характеристики жидкостного ГГ:
При вертикальном расположении корпуса ГГ (фиг. 1) на верхний гидрофон 2 действует избыточное давление Р1.

где р - удельная плотность жидкостной массы;
h - расстояние от компенсатора до гидрофона;
g0 - среднее значение ускорения свободного падения в центре инерционной массы ГГ;
gradzg0 - вертикальная составляющая градиента ускорения свободного падения, а также в центре инерционной массы.
На нижний гидрофон 3 действует избыточное давление Р2:

При параллельном включении гидрофонов 2 и 3 суммарный выходной сигнал с них будет равен:

где Кг - коэффициент преобразования гидрофонов 2 и 3.
Т.е. в общем случае выходной сигнал с ГГ пропорционален чувствительности гидрофонов (Кг), удельной плотности используемой жидкостной инерционной массы (р), величине градиента ускорения силы тяжести и квадрату расстояния от центра масс жидкостной и инерционной массы до преобразователей микродавлений гидрофонов.
Оценим среднее значения статических давлений, воздействующих на гидрофоны в покое Рс и при вращении ГГ вокруг центра масс с частотой 10 Гц, Р10, при условии h=0,1 м, g0=10 м/с2, Рс=103 кг/м3 (вода).


где а10 - центробежное (ротационное) ускорение, воздействующее на жидкостную массу, причем следует отметить, что это завышенное значение. Учитывая линейный характер увеличения ускорения с расстоянием и неизменность р, в качестве оценки а10 целесообразно использовать выражение а10=(2πf)2×h/2 и тогда Р10=2×104 Па.
Полученные значения Рс и Р10 важны для оценки предельных статических воздействий на гидрофоны при их эксплуатации, конструировании и достижении идентичности их коэффициентов преобразования, поскольку именно они будут определять степень подавления больших, но не содержащих полезной информации синфазных сигналов.
Получив оценки неинформативных максимальных синфазных сигналов, оценим предельно достижимый на сегодня порог чувствительности ГГ по давлению при использовании в качестве МЭПЭ наиболее чувствительного из известных гидрофонов ГИ-50Э. Из его паспортных данных следует, что собственные шумы ГИ-50Э приведенные ко входу Рш в 1/3 октавной полосе 20 Гц составляют величину порядка 15 дБ относительно 20 мкПа или Рш=10-4 Па. Т.е. 10-4 Па это минимально различимая гидрофоном ГИ-50Э в полосе 5 Гц (ширина 1/3 октавной полосы 20 Гц) величина давления (порог чувствительности, при котором отношение сигнал/шум равно единице).
Оценим для выше приведенных параметров ГГ величину давления Ртр, возникающего в его жидкостной инерционной массе при воздействии на акселерометр требуемого ускорения.

Из сравнения требуемого для удовлетворения минимального измеряемого уровня давления Ртр, и эквивалентного шумового давления, которое можно измерить с использованием существующих готовых технических решений, что Рш на два порядка превышает Ртр.
Работа электронного блока ясна из фиг. 2.
Таким образом ГГ является более простым по сравнению с прототипом прибором и как показано выше более чувствительным к измеряемому параметру.
Этим достигается поставленный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАДИЕНТОМЕТР | 2019 |
|
RU2724461C1 |
| Способ морской гравиметрической съемки и устройство для его осуществления | 2020 |
|
RU2767153C1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2014 |
|
RU2572046C1 |
| ГРАДИЕНТОМЕТР СИЛЫ ТЯЖЕСТИ | 1991 |
|
RU2043644C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |
| Самовсплывающая портативная донная сейсмическая станция без оставления груза на дне моря | 2022 |
|
RU2796944C1 |
| Электрокинетический угловой акселерометр | 1988 |
|
SU1578661A1 |
| Вертикальный градиентометр | 1988 |
|
SU1836644A3 |
| Низкочастотный векторный акустический приемник | 2016 |
|
RU2650839C1 |
| КОМБИНИРОВАННЫЙ ВЕКТОРНЫЙ ПРИЕМНИК | 2019 |
|
RU2708184C1 |

Изобретение относится к устройствам для измерения параметров гравитационного поля Земли. Сущность: гравитационный градиентометр содержит цилиндрический герметичный корпус (1), внутри которого размещен механоэлектрический преобразовательный элемент в виде двух гидрофонов (2, 3), установленных на торцах корпуса. Входы и выходы гидрофонов (2, 3) соединены с электронным блоком. Внутренняя полость корпуса (1) заполнена жидкостью (4), выполняющей роль инерционной массы. В центральной части корпуса (1) размещен компенсатор (5) давления, уравнивающий внешнее и внутреннее давление. Технический результат: упрощение устройства и повышение его чувствительности. 3 з.п. ф-лы, 2 ил.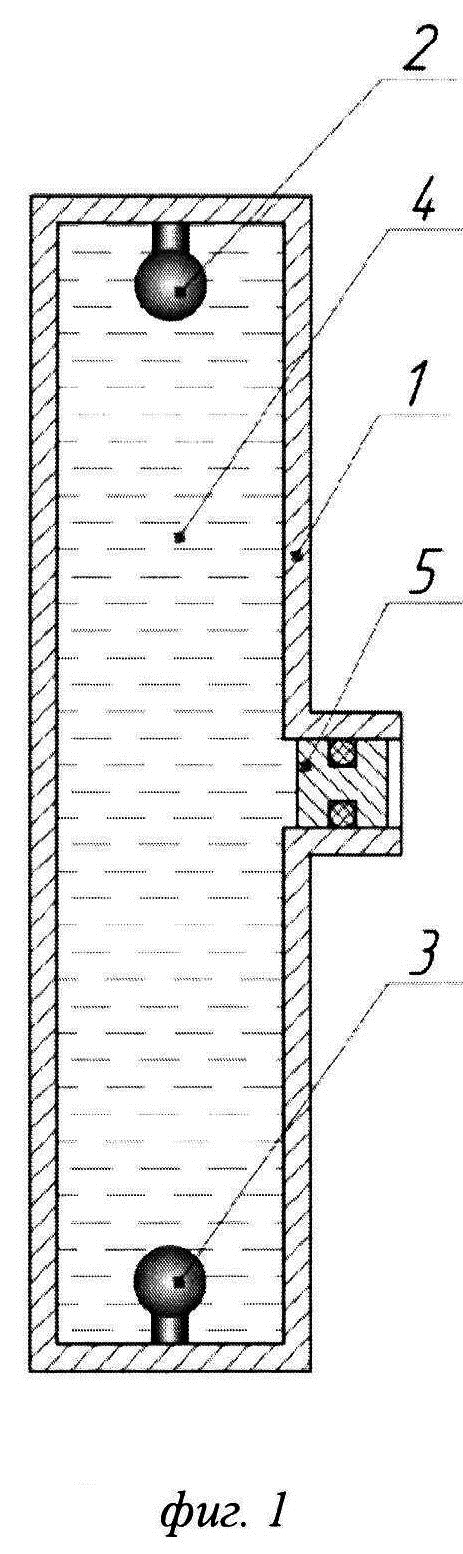
1. Гравитационный градиентометр, содержащий цилиндрический герметичный корпус, механоэлектрический преобразовательный элемент и инерционную массу, расположенную в корпусе, а также электронный блок, соединенный с входами и выходами преобразовательных элементов, отличающийся тем, что дополнительно содержит компенсатор давления, установленный в центральной части корпуса, при этом механоэлектрический преобразовательный элемент выполнен в виде двух гидрофонов, установленных на торцах цилиндрического корпуса, а в качестве инерционной массы используют жидкость, заполняющую герметичный корпус.
2. Гравитационный градиентометр по п. 1, отличающийся тем, что в качестве жидкой инерционной массы применяется дистиллированная вода.
3. Гравитационный градиентометр по п. 1, отличающийся тем, что в качестве жидкой инерционной массы применяется ртуть.
4. Гравитационный градиентометр по п. 1, отличающийся тем, что электронный блок выполнен в виде двух усилителей, один из которых с регулируемым усилением, и сумматора, при этом выходы механоэлектрического преобразователя соединены с входами усилителей, подключенных выходами к входам сумматора.
| ГРАВИТАЦИОННЫЙ ТРЕХКОМПОНЕНТНЫЙ ГРАДИЕНТОМЕТР | 1992 |
|
RU2046380C1 |
| ГРАВИТАЦИОННЫЙ ТРЕХКОМПОНЕНТНЫЙ ГРАДИЕНТОМЕТР | 1990 |
|
RU2033632C1 |
| ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 0 |
|
SU232534A1 |

