Изобретение относится к области приборостроения, в частности к гироскопам, и предназначено для применения в навигационных приборах.
Известны динамически настраиваемые гироскопы (ДНГ) [1, стр. 165-174], в которых ротор установлен на упругий подвес, соединенный с двигателем. Их недостатком является необходимость измерения рабочего угла между телами, движущимися по двум рабочим и четырем нерабочим координатам, что приводит к большим ошибкам. Так как подвес в этих гироскопах -плоский, то появляется значительная погрешность, связанная с изменением ориентации относительно действующего ускорения. От первого недостатка свободен гироскоп [2], в котором датчик угла помещен в герметичную ампулу, установленную в маховике гироскопа. Недостатком этого гироскопа является использование в качестве датчиков угла емкостно-частотного преобразователя с ограниченной чувствительностью и размещение маховика в корпусе с повышенным давлением. От второго недостатка свободны гироскопы [3.4], в которых весь маховик помещен в герметичную камеру, вращающуюся вместе с маховиком. Однако общий недостаток ДНГ: зависимость от ориентации относительно действующего ускорения сохраняется.
Жесткость подвеса зависит от чувствительности датчиков угла, среди которых в настоящее время чаще всего используются емкостные датчики [2-4], представляющие собой сложную гребенчатую структуру. Их недостатками являются относительно большие габариты, наличие силовых тяжений и возможность слипания обкладок. Этими недостатками не обладает пьезоэлектрический датчик [5]. Однако у него малая чувствительность. Наивысшую чувствительность имеет оптический датчик [6, стр. 170], чувствительность которого оценивается половиной длины волны света 
Задачей изобретения является улучшение характеристик гироскопа путем повышения чувствительностью датчика угла и изменения геометрии ротора и подвеса.
Это достигается тем, что ротор выполнен в виде двух одинаковых круглых маховиков, соединенных в центре и на периферии перемычками. Подвес содержит два элемента: направленную вдоль главной оси ротора нить, которая препятствует перемещению ротора вдоль этой оси, и упругую мембрану, охватывающую центральную перемычку по экватору и исключающую перемещения вокруг главной оси и вдоль осей перпендикулярных ей. Периферийные перемычки не соприкасаются с мембраной. Мембрана может быть выполнена в виде набора пластин, и в ней могут быть сделаны отверстия. В камере и на роторе для измерения углов установлены зонды и подложки туннельных микроскопов. Камера с ротором и подвесом могут быть выполнены в виде одной детали. Полости в камере, в зависимости от условий работы, заполняются газом под разным давлением или жидкостью.
Технический результат заключается в повышении точности и чувствительности гироскопов и уменьшении их габаритов.
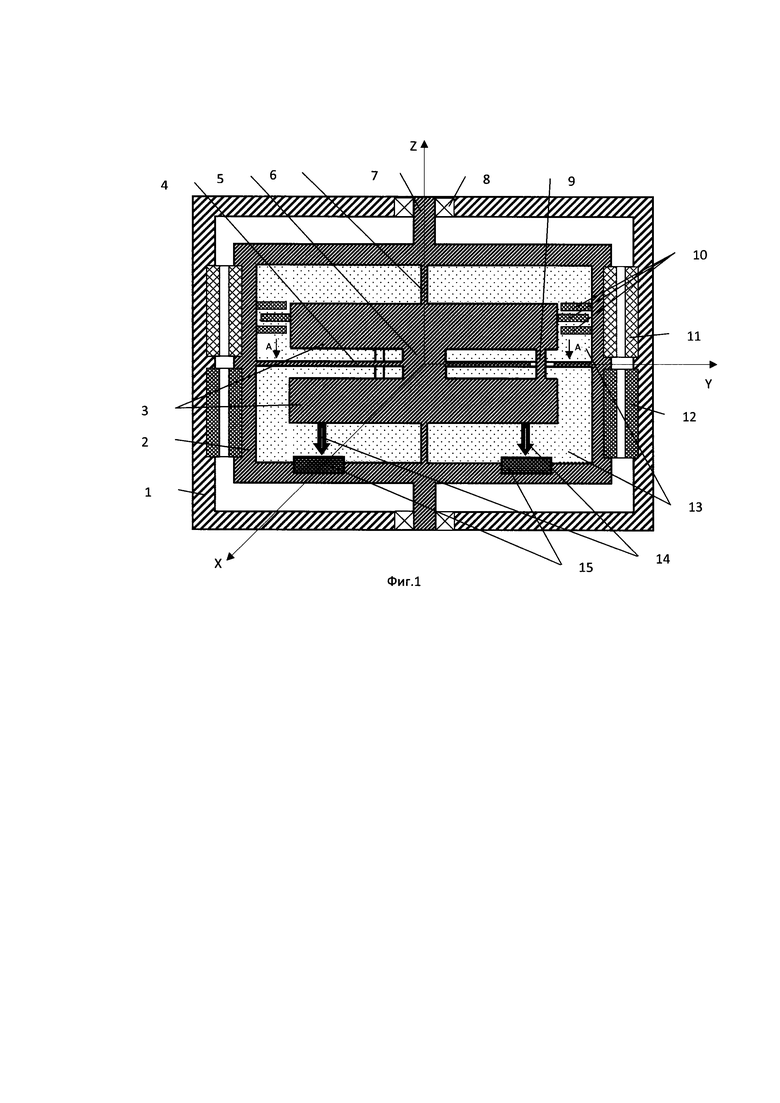
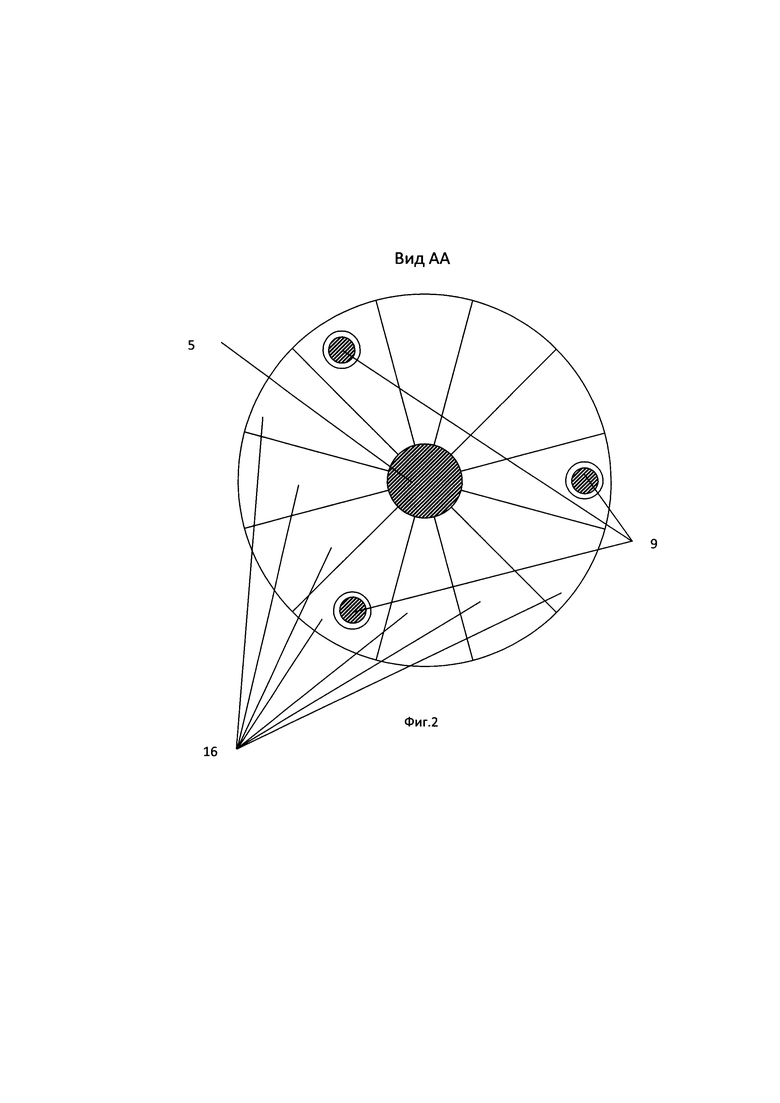
Устройство гироскопа приведено на Фиг. 1 и Фиг. 2. На них изображены следующие элементы:
1 - корпус,
2 - камера,
3 - маховики ротора,
4 - мембрана подвеса,
5 - центральная перемычка,
6 - нить подвеса,
7 - вал,
8 - подшипник,
9 - периферийная перемычка,
10 - обкладки датчика момента,
11 - двигатель гироскопа,
12 - датчик угла поворота камеры относительно корпуса гироскопа,
13 - полости камеры,
14 - зонды туннельных микроскопов,
15 - подложки туннельных микроскопов, 16- пластины мембраны,
X, Y, Z - координатные оси.
Гироскоп содержит корпус 1, в котором расположена камера 2 и ротор, состоящий из двух маховиков 3. Ротор подвешен в мембране 4, соединенной с центральной перемычкой 5 и камерой. Подвес ротора содержит нить 6. Вал камеры 7 помещен в подшипник 8 корпуса. Камера, ротор, мембрана, нить и вал выполнены в виде одной детали. Маховики помимо центральной перемычки соединены периферийными перемычками 9. Угловое положение ротора в камере относительно осей X,Y удерживается датчиком момента 10, содержащим роторные и статорные обкладки. В зазоре между корпусом и камерой размещен двигатель 11, приводящий камеру во вращение относительно оси Z, и датчик угла вращения камеры 12 вокруг той же оси. Полости камеры 13 в зависимости от условий работы могут быть заполнены газом или жидкостью. Для измерения углов поворота относительно осей X,Y ротора в камере размещены туннельные микроскопы с зондами 14 и подложками 15. Мембрана может быть изготовлена в виде отдельных пластин 16.
Для уменьшения деформаций, возникающих при старении материала, изменении температуры, и механических нагрузках при изготовлении камеру 2, ротор 3, перемычки 5,9, подвес ротора 4,6 и вал 7 изготавливают в виде одной детали из анизотропного материала, например, из кварцевого стекла. Внутри камеры устанавливают датчики момента 10 и туннельные микроскопы с зондами 14 и подложками 15. Вал камеры 7 вращается в подшипниках 8, причем для увеличения скорости вращения и снижения уровня вибраций, обычно используют аэродинамические подшипники [4]. Приведение во вращение камеры обеспечивается двигателем 11, а угол поворота камеры относительно корпуса измеряется датчиком угла 12. В зависимости от условий работы полости 13 камеры заполняются газом под различным давлением или жидкостью, повышающей перегрузочные свойства гироскопа. Мембрана 4 может быть сплошной или состоять из отдельных пластин 16. Количество пластин и величина промежутков между ними могут варьироваться в зависимости от условий работы гироскопа. В мембране имеются отверстия для выравнивания давления в полостях и размещения периферийных перемычек.
Так как основным элементом подвеса гироскопа является мембрана, то рассчитаем параметры гироскопа, исходя из того, что она сделана сплошной из кварца.
Закон изменения прогиба круглой пластины под действием сосредоточенного момента в центре определяется выражением [7]

где: М - момент,
R=0,01 м - радиус диафрагмы,

 - толщина пластины,
- толщина пластины,
Е=7,3*1010 Па - модуль упругости,
μ=0,17 - модуль сдвига,
 - отношение радиуса, на котором измеряется деформация, к радиусу мембраны
- отношение радиуса, на котором измеряется деформация, к радиусу мембраны
θ - угол между плоскостью действия сил и направлением на точку деформации.
Примем, что ротор представляет собой два диска с радиусом R равным суммарной высоте двух дисков h=R=0.01 м, соединенных перемычкой радиусом r=0.2R=0,002 м
R=h
Гироскопический момент такого ротора запишется в виде

где: J - момент инерции ротора,
 - плотность кварца,
- плотность кварца,
 - угловая скорость вращения ротора,
- угловая скорость вращения ротора,
 - чувствительность гироскопа по скорости.
- чувствительность гироскопа по скорости.
Будем считать, что деформация измеряется на периферии дисков, то - есть на плече
Выражение для максимального значения (cos θ = 1)измеренной деформации получим после подстановка (2), (3), (4) в (1)

Подставив характеристики кварца и угловые скорости, получим зависимость деформации от размеров ротора и мембраны

Кварцевые пластины изготавливают толщиной 60-100 мкм [8]. Если принять толщину мембраны  то получим деформацию.
то получим деформацию.

Туннельный микроскоп [9] преобразует перемещения порядка  в электрический ток I, экспоненциально зависящий от расстояния
в электрический ток I, экспоненциально зависящий от расстояния
I=I0e-2L,
где I0 - начальный ток.
Относительное изменение тока δI в зависимости от абсолютного изменения зазора в ангстремах  определится формулой
определится формулой
δI=e-2ΔL
Точность удержания зазора в туннельном микроскопе можно определить из предположения, что для срабатывания электроники достаточно изменения тока на 5% (δI=1,05). Такое изменение тока происходит при изменении зазора на величину

Сравнивая (8) и (7), убеждаемся, что чувствительности микроскопа обеспечивает необходимую чувствительность гироскопа.
При работе в условиях больших перегрузок, полость камеры заполняется жидкостью, не препятствующей работе туннельных микроскопов [10]. Плотность жидкости может выбираться в широких пределах вплоть до обеспечения нейтральной плавучести ротора.
Можно предположить, что при радиусе и высоте ротора 0,01 м диаметр и высота всего гироскопа не превысят ∅40*30 мм, что меньше габаритов прибора [11], а чувствительность заявленного гироскопа на два порядка выше.
Технический эффект состоит в повышении чувствительности гироскопа и уменьшении его габаритов.
Источники информации.
1. Лысов А.Н., Виниченко Н.Т., Лысова А.А. Прикладная теория гироскопов. Челябинск. Издательский центр ЮУрГУ, 2009 стр. 172-177.
2. Патент РФ 2101679. Динамически настраиваемый гироскоп. Авторы: Белугин В.Б., Гулевич В.П., Невоструев В.В. Патентообладатель: Миасский электромеханический научно-исследовательский институт Научно-производственного объединения электромеханики. 1988.02.11.
3. Патент РФ №2303766. Модуляционный гироскоп. Авторы: Андреев A. Г., Ермаков B.C., Максимов А.Г., Нестеров И.И., Середа Ю.А., Чудинов А.Ю. Патентообладатель: ОАО "Пермская научно-производственная приборостроительная компания". 2005-07-19.
4. Патент РФ №2157965. Динамически настраиваемый гироскоп. Авторы: Вечтомов B.М., Кочкин Е.Ф., Малышкин Н.Н., Черепанов В.А., Люсин Ю.Б., Попов Г.В. Патентообладатель: ЦНИИ "Дельфин". 15.03.1999.
5. Патент РФ №2426072. Пьезоэлектрический вибрационный гироскоп. Авторы: Маринушкин П.С, Левицкий А.А. Патентообладатель: "Сибирский федеральный университет" (СФУ) 09.03.2010.
6. Распопов В.Я. Микромеханические приборы. М. Машиностроение. 2007.
7. Л.М. Савельев Теория пластин и оболочек Конспект лекций "Прочность конструкций летательных аппаратов. «Самарский государственный аэрокосмический университет им. С.П. Королева» (СГАУ). Самара. 2013.
8. Патент РФ 2117382. Способ изготовления кварцевых кристаллических элементов AT- среза. Авторы: Кибирев С.Н., Ярош A.M. Патентообладатель: «Омский научно-исследовательский институт приборостроения». 1995-06-06.
9. Миронов В.Л. Основы сканирующей зондовой микроскопии. РАН. Институт физики микроструктур. Нижний Новгород. 2004 г.
10. www.nkj.ru./news/29567/ Туннельный микроскоп маслом не испортишь.
11. Кулешов А.В., Подчезерцев В.П., Фатеев В.В. Методические указания к лабораторной работе по курсу «Гироскопические приборы и системы ориентации» Динамически настраиваемый гироскоп. Московский государственный технический университет им. Н.Э. Баумана. Москва. 2009.
| название | год | авторы | номер документа |
|---|---|---|---|
| Прямой преобразователь перемещений для микромеханических приборов (датчик перемещений) | 2019 |
|
RU2713964C1 |
| Комплекс для измерения абсолютного значения ускорения силы тяжести на подвижном основании | 2019 |
|
RU2705926C1 |
| ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР С ПОВЫШЕННОЙ ЧАСТОТОЙ СОБСТВЕННЫХ КОЛЕБАНИЙ | 2015 |
|
RU2577550C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2002 |
|
RU2235976C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2157965C1 |
| Способ балансировки динамически настраиваемого гироскопа | 2018 |
|
RU2690039C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| СПОСОБ РЕГУЛИРОВКИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2007 |
|
RU2344375C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2017 |
|
RU2653155C1 |
Изобретение относится к области приборостроения, в частности к гироскопам, и предназначено для применения в навигационных приборах. Гироскоп содержит корпус, вращающуюся камеру и установленный в камере на упругом подвесе ротор, при этом ротор выполнен в виде двух маховиков одинакового диаметра, соединенных в центре перемычкой меньшего диаметра, подвес выполнен в виде направленной вдоль главной оси ротора нити и мембраны, расположенной по экватору перемычки и соединяющей ее с камерой. Технический результат заключается в повышении точности и чувствительности гироскопов и уменьшении их габаритов. 5 з.п. ф-лы, 2 ил.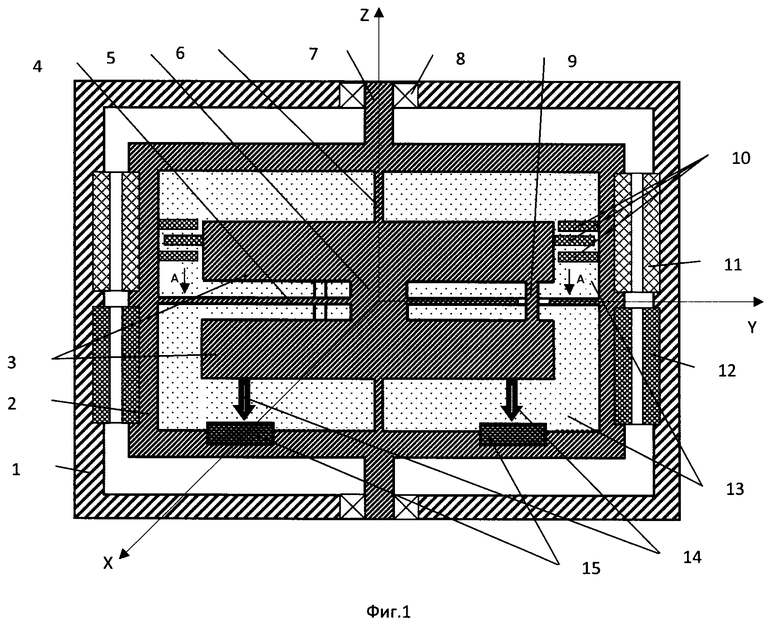
1. Гироскоп, содержащий корпус, вращающуюся камеру и установленный в камере на упругом подвесе ротор, отличающийся тем, что ротор выполнен в виде двух маховиков одинакового диаметра, соединенных в центре перемычкой меньшего диаметра, подвес выполнен в виде направленной вдоль главной оси ротора нити и мембраны, расположенной по экватору перемычки и соединяющей ее с камерой.
2. Гироскоп по п. 1, отличающийся тем, что мембрана выполнена в виде отдельных пластин.
3. Гироскоп по п. 1, отличающийся тем, что маховики соединены дополнительными перемычками на периферии.
4. Гироскоп по п. 1, отличающийся тем, что камера с ротором и подвесом выполнены в виде одной детали.
5. Гироскоп по п. 1, отличающийся тем, что на периферии маховиков и камеры установлены зонды и подложки туннельных микроскопов.
6. Гироскоп по п. 1, отличающийся тем, что вращающийся ротор помещен в жидкость.
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2157965C1 |
| Гироскоп с жидким ротором | 1960 |
|
SU134453A1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 1995 |
|
RU2116623C1 |
| US 3142991 A1, 04.08.1964. | |||

