Изобретение относится к области обнаружения гидроакустического шумоизлучения подводных и надводных объектов, прослушивания и регистрации гидроакустических воздействий в натурных водоемах в диапазоне частот и повышенной чувствительностью в инфразвуковой части в пределах от нуля до 5 Гц. Заявляемый способ обнаружения гидроакустических колебаний реализуется при использовании приемного модуля и основан на измерении его угловой скорости корпуса модуля до начала и в процессе шумоизлучения объектов.
Существует вид гидроакустических полей плавсредств - подводный шум, вызываемый работающими механизмами и движением плавсредств в водной среде. В области измерения гидроакустических сигналов известна потребность в возможности определять пространственное шумоизлучение надводных и подводных объектов, чтобы в дальнейшем использовать такую информацию в вычислительных программах по идентификации объектов и определению их пространственного положения.
Известен способ измерения уровня давления шумоизлучения движущегося объекта в натурном водоеме по патенту РФ №2108007, дата приоритета от 01.11.1994, заключающийся в размещении в заданной области водоема рабочего гидроакустического средства измерений, направлении контролируемого объекта с равномерной скоростью курсом к рабочему гидроакустическому средству и измерении эффективных значений напряжений на выходе рабочего средства измерений. Перед проведением измерений уровня шумоизлучения движущегося объекта на последнем устанавливают управляемый гидроакустический источник опорных сигналов с переменным уровнем излучения, а измерение эффективных значений напряжений на выходе рабочего гидроакустического средства проводят последовательно при выключенном и включенном источнике опорных сигналов. При этом при включенном источнике опорных сигналов измеряют уровень излучения последнего до момента удвоения эффективного значения напряжения на выходе рабочего средства, получаемого ранее при выключенном источнике опорных сигналов, и в момент удвоения эффективного значения напряжения на выходе рабочего средства измеряют уровень давления шумоизлучения движущегося объекта в натурном водоеме по значению уровня излучения источника опорных сигналов.
Недостатком данного способа является узкий рабочий диапазон измеряемых акустических воздействий от 5 Гц до 7-8 Гц.
Известен способ измерения параметров шумоизлучения объекта в натурном водоеме оптическими средствами, известный из заявки РФ №94006050 на изобретение с датой приоритета от 22.02.1994 г. Существо изобретения заключается в том, что в заданной области натурного водоема располагают сигнальную катушку волоконно-оптического интерференционного гидрофона, а в дополнительном водоеме располагают его опорную катушку. При этом в дополнительном водоеме формируют калиброванное гидроакустическое поле, с помощью которого непосредственно в процессе измерений периодически уточняют калибровочный коэффициент волоконно-оптического гидрофона.
Недостатком способа является узкий диапазон рабочих частот и большая сложность реализации.
Наиболее близким техническим решением к заявляемому изобретению является способ исследования первичных гидроакустических полей шумящего объекта по патенту РФ 2329474, дата приоритета от 21.06.2006, заключающийся в расположении гидроакустического приемного модуля в заданной области натурного водоема, направлении к приемному модулю исследуемого шумящего объекта и измерении приемным модулем параметров шумящего объекта при последующей обработке последних на компьютере. В качестве приемного модуля используют комбинированный гидроакустический приемник с разнесенными в пространстве на расстояние, не превышающее 0,2λ в пределах приемного модуля векторным приемником и приемником звукового давления, а в качестве измеряемого приемным модулем параметра - акустическую мощность шумящего объекта, измеряемую в плоскости, ориентированной вдоль траектории движения объекта, где λ - минимально регистрируемая длина звуковой волны в спектре шумоизлучения шумящего объекта.
Данное изобретение направлено на повышение информативности об исследуемых первичных гидроакустических полях шумящего объекта. Прослушивание гидроакустических воздействий в натурных водоемах в широком диапазоне частот при использовании данного способа невозможно.
Общей операцией в способах прослушивания и регистрации гидроакустических воздействий, рассматриваемых в качестве аналогов и прототипа, является измерение уровня звукового давления на приемный модуль, имеющий прямой контакт с внешней водной средой.
Отличительными признаками заявляемого способа является использование в качестве приемного модуля высокочувствительного датчика угловой скорости, измерение угловой скорости корпуса приемного модуля, обработка полученной информации в вычислительном модуле, определение параметров колебания водной среды по предлагаемому математическому выражению.
Технической задачей заявленного технического решения является расширение диапазона обнаружения гидроакустических воздействий, в частности, в области инфранизких частот в пределах от нуля до 5 Гц.
Технические результаты заключаются в повышении чувствительности к измерению низкочастотных акустических сигналов и повышении точности измерения акустических колебаний, что позволит определить и контролировать движение подводных объектов на шельфе на малых глубинах и в океане на повышенных дальностях.
Данные технические результаты достигаются за счет того, что при осуществлении способа обнаружения гидроакустических воздействий располагают гидроакустический приемный модуль гидрофона в натурном водоеме на якоре с поплавком. Выполняют измерения приемным модулем параметров шумящего объекта при последующей обработке таких параметров на компьютере. Исходной информацией для прослушивания и регистрации акустических воздействий является угловая скорость колебания корпуса приемного модуля гидрофона, вызванная этим воздействием.
В качестве приемного модуля гидрофона используют высокочувствительный датчик угловой скорости. Измеряют величину угловой скорости, полученную информацию обрабатывают в вычислительном блоке и на ее основе определяют величины, характеризующие измеряемое гидроакустическое воздействие по математическому выражению:

где t - время измерений;
L - радиус поворота датчика;

S - линейное смещение.
В качестве датчика угловой скорости используется высокочувствительный волоконно-оптический гироскоп, имеющий повышенную длину волокна до 25 км, работающий в режиме измерения угловой скорости в заданном диапазоне частот от нуля до 5 Гц.
Способ обнаружения гидроакустических воздействий реализуется следующим образом.
Гидроакустический приемный модуль гидрофона располагают в натурном водоеме на якоре с поплавком. В качестве приемного модуля гидрофона используют высокочувствительный датчик угловой скорости. Приемный модуль гидроакустических сигналов выполнен в виде катушки оптоволокна, размещенной в корпусе датчика угловой скорости. Далее измеряют величину угловой скорости приемного модуля, полученную информацию обрабатывают в вычислительном блоке и на ее основе определяют величины, характеризующие измеряемое гидроакустическое воздействие по математическому выражению: 
На фигуре 1 представлена схема расположения приемного модуля гидрофона в положении равновесия и при смещении.
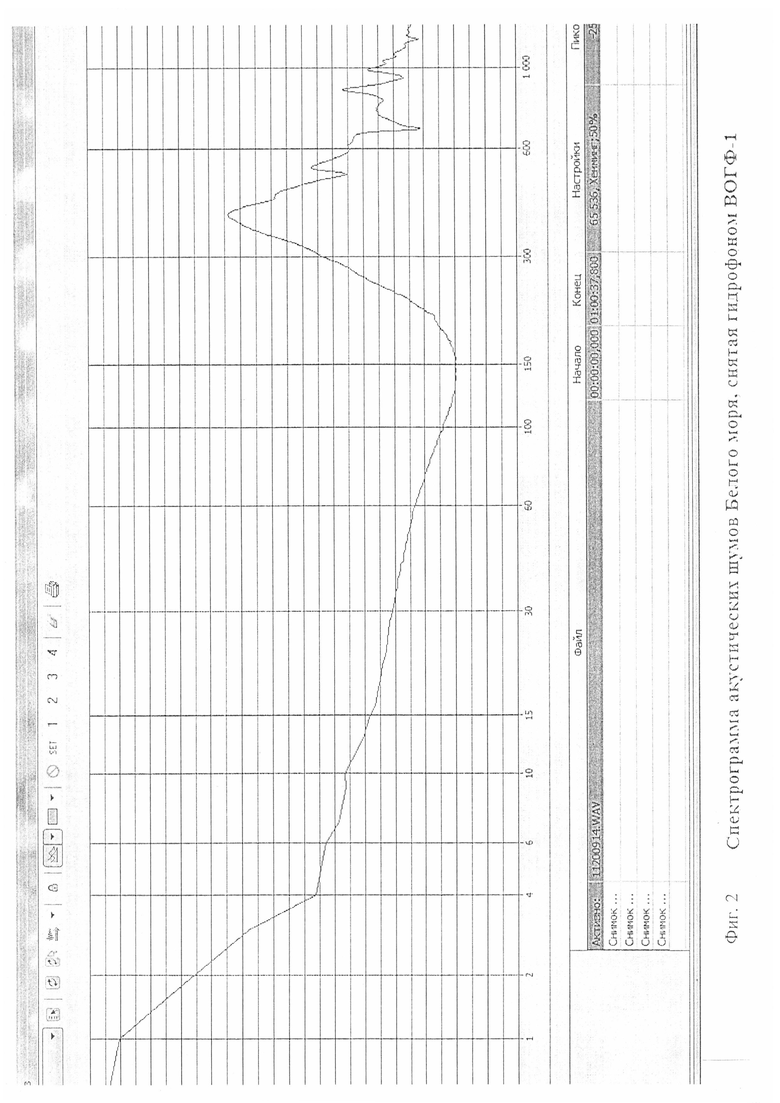
На фигуре 2 представлена спектрограмма акустических шумов Белого моря, полученная при применении гидрофона ВОГФ-1.
Движение корпуса приемного модуля может быть представлено как движение материальной точки с массой m под действием упругой силы F=-kx, пропорциональной смещению с коэффициентом упругости k и имеющей противоположный знак. Полагая, что в начальный момент времени смещение точки х0=1 и начальная скорость V0=0, закон движения этой точки представляется в виде x=cosωt, где 
В общем случае материальная точка движется по закону:
S=Acos(ωt+φ),
где S - смещение, т.е. текущее расстояние от колеблющейся точки до положения равновесия;
А - амплитуда смещения, т.е. максимальное смещение точки от положения равновесия;
(ωt+φ) - фаза колебания;
φ - начальная фаза.
Именно такая зависимость является характеристикой колебания водной среды. Текущее значение скорости смещения точки представляется в виде V=-Aωsin(ωt+φ).
Вариант размещения приемного модуля гидрофона с гибкой подвеской на якоре с постоянной длиной каната L и поплавком для поддержания гидрофона в вертикальном положении представлен на фиг. 1.
Под действием упругой силы материальная точка со скоростью V смещается на расстояние S, что фиксируется гидрофоном как колебание водной среды, т.е. акустический сигнал.
На фиг. 1 показано, что при постоянной величине L действие упругой силы будет вызывать угловое перемещение корпуса приемного модуля вместе с его чувствительным элементом-датчиком угловой скорости, в котором частота и амплитуда измеряемых сигналов 
Ω=-Aωsin(ωt+φ), что соответствует текущему углу разворота на угол Ω=A1cos(ωt+φ) или в переводе на линейные смещения S=A1Lcos(ωt+φ).
Подобранные расчетным и подтвержденные опытным путем соотношения величины амплитуд A и A1 позволяют проводить обработку информации, полученную с датчиков угловой скорости, по алгоритмам, аналогичным имеющимся алгоритмам для традиционных способов, где измеряемой физической величиной является акустическое давление.
Волоконно-оптический гироскоп (ВОГФ-1) - это прибор, который предназначен для измерения угловой скорости и используется большей частью в инерциальных измерительных системах. В состав волоконно-оптического гироскопа входит лазер, оптическое волокно на катушке и фотоприемник. С помощью лазера в оптическое волокно вводят два встречных луча, которые после прохождения по катушке фиксируются фотоприемником. При вращении катушки вокруг оси угловая скорость этого вращения фиксируется через разность фаз встречных лучей на выходе из катушки.
Экспериментальное подтверждение эффективности заявленного способа измерения и регистрации гидроакустических воздействий получено в сентябре 2014 года на Государственном центральном морском полигоне, где проведены по согласованной программе ОАО «НПО автоматики» и в/ч 09703 с выпуском отчета натурные испытания разработанного ОАО «НПО автоматики» гидрофона ВОГФ-1, в котором реализован заявляемый способ измерения и регистрации гидроакустических воздействий на основе измерения угловой скорости корпуса приемного модуля. В частности, на фиг. 2 приведены полученные на этих испытаниях результаты измерений естественного фонового шума Белого моря в диапазоне частот от 0 до 2000 Гц.
Из спектрограммы следует, что регистрируемый сигнал в полосе частот от нуля до 1 Гц (инфразвук Белого моря) превышает сигнал в полосе частот около 100 Гц практически на 50 дБ, чем подтверждается высокая чувствительность заявленного способа измерения и регистрации гидроакустических воздействий в полосе инфранизких частот 0÷5 Гц.
Таким образом, выполнение гидроакустического приемного модуля гидрофона на якоре с поплавком, расположение его в натурном водоеме, использование высокочувствительного датчика угловой скорости в качестве приемного модуля гидрофона, измерение величины угловой скорости, обработка полученной информации в вычислительном блоке и определение величины, характеризующей измеряемое гидроакустическое воздействие по математическому выражению
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ГИДРОДИНАМИЧЕСКИХ ВОЗДЕЙСТВИЙ | 2015 |
|
RU2587685C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И РЕГИСТРАЦИИ ГИДРОАКУСТИЧЕСКИХ И ГИДРОДИНАМИЧЕСКИХ ВОЗДЕЙСТВИЙ | 2015 |
|
RU2587523C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ПЕРВИЧНЫХ ГИДРОАКУСТИЧЕСКИХ ПОЛЕЙ ШУМЯЩЕГО ОБЪЕКТА | 2006 |
|
RU2329474C2 |
| Способ определения координат, диаграмм направленности и акустической мощности зон излучения на корпусе движущегося шумящего объекта | 2022 |
|
RU2799388C1 |
| Способ исследования структуры первичных гидроакустических полей шумящего объекта | 2022 |
|
RU2787312C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЕЙ И ГОРИЗОНТАЛЬНОЙ НАПРАВЛЕННОСТИ ШУМОВ МОРСКОГО НЕФТЕГАЗОВОГО КОМПЛЕКСА | 2011 |
|
RU2480781C2 |
| Носитель аппаратуры измерительного гидроакустического комплекса | 2016 |
|
RU2639846C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ДАВЛЕНИЯ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В НАТУРНОМ ВОДОЕМЕ | 1994 |
|
RU2108007C1 |
| ШУМОПЕЛЕНГАТОР | 1995 |
|
RU2106651C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЕЙ ДАВЛЕНИЯ И ПРОСТРАНСТВЕННОГО РАСПОЛОЖЕНИЯ ИСТОЧНИКОВ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1993 |
|
RU2092802C1 |

Изобретение относится к области метрологии, а именно к методам обнаружения гидроакустических шумоизлучений. Способ обнаружения гидроакустических воздействий заключается в расположении гидроакустического приемного модуля гидрофона в натурном водоеме на якоре с поплавком, измерении приемным модулем параметров шумящего объекта при последующей обработке таких параметров на компьютере. В качестве приемного модуля гидрофона используют высокочувствительный датчик угловой скорости. Выполняют измерение величины угловой скорости, полученную информацию обрабатывают в вычислительном блоке и на ее основе определяют величины, характеризующие измеряемое гидроакустическое воздействие по математическому выражению:
где t - время измерений; L - радиус поворота датчика; 

1. Способ обнаружения гидроакустических воздействий, заключающийся в расположении гидроакустического приемного модуля гидрофона в натурном водоеме на якоре с поплавком, измерении приемным модулем параметров шумящего объекта при последующей обработке таких параметров на компьютере, отличающийся тем, что в качестве приемного модуля гидрофона используют высокочувствительный датчик угловой скорости, измеряют величину угловой скорости, полученную информацию обрабатывают в вычислительном блоке и на ее основе определяют величины, характеризующие измеряемое гидроакустическое воздействие по математическому выражению:
где t - время измерений;
L - радиус поворота датчика;

S - линейное смещение.
2. Способ обнаружения гидроакустических воздействий по п. 1, отличающийся тем, что в качестве датчика угловой скорости используют высокочувствительный волоконно-оптический гироскоп, имеющий повышенную длину волокна до 25 км.
| СПОСОБ ИССЛЕДОВАНИЯ ПЕРВИЧНЫХ ГИДРОАКУСТИЧЕСКИХ ПОЛЕЙ ШУМЯЩЕГО ОБЪЕКТА | 2006 |
|
RU2329474C2 |
| US 6529444 B2, 04.03.2003 | |||
| US 4799752 A1, 24.01.1989 | |||
| УПРУГОЕ УСТРОЙСТВО И СПОСОБ ЗАДАНИЯ ЕГО ХАРАКТЕРИСТИКИ | 2011 |
|
RU2500937C2 |
| US 2002141681 A1, 03.10.2002 | |||
| JP 2007205940 A, 18.06.2007 | |||
| ГЕОГИДРОФОН | 2003 |
|
RU2231088C1 |

