Изобретение относится к дорожной фрезерной машине для обработки дорожных покрытий в соответствии с ограничительной частью пункта 1 формулы изобретения, а также к способу поворота перемещаемого блока привода дорожной фрезерной машины, в соответствии с ограничительной частью пункта 13 формулы изобретения.
Дорожная фрезерная машина известна, например, из EP 916004 A.
Такая дорожная фрезерная машина содержит контроллер для выполнения операции перемещения, рулевого управления и фрезерования, причем указанный контроллер управляется оператором, и обеспечена рамой машины, регулируемой по высоте с помощью подъемных колонн.
Перемещаемые блоки привода расположены на нижних концах подъемных колонн, которые могут быть выполнены в виде перемещаемых колесных блоков привода или перемещаемых гусеничных блоков привода. В этой конструкции также возможно иметь комбинацию перемещаемых колесных и гусеничных блоков привода.
Рабочий барабан, вращающийся вокруг оси, размещен на раме машины.
Не менее чем одна из задних подъемных колонн с перемещаемым блоком привода, прикрепленным к ним, является поворачиваемой посредством поворотного рычага из первого внешнего крайнего положения, выступающего поперечно относительно рамы машины, во второе внутреннее крайнее положение, полностью или частично находящееся внутри рамы машины. Внутреннее положение требуется для того, чтобы иметь возможность приводить в движение машину максимально близко вдоль препятствий с так называемой нулевой стороны дорожной фрезерной машины, причем нулевой стороной дорожной фрезерной машины является та сторона, на которой передний конец рабочего барабана продолжается максимально близко к внешней стороне дорожной фрезерной машины.
Поворачиваемый перемещаемый блок привода также обеспечен рулевым устройством, которое может регулировать угол поворота для перемещаемого блока привода, который отклоняется от перемещения прямо вперед. Одно приводное устройство предназначено и для приведения в движение поворотного рычага и для приведения в движение рулевого устройства.
В таких дорожных фрезерных машинах перемещаемый блок привода должен быть поднят для того, чтобы перемещать его из одного крайнего положения в другое крайнее положение независимо от того, направляется ли подъемная колонна одним поворотным рычагом или двумя поворотными рычагами, соединенными шарнирно параллелограммообразным образом или другим образом. С этой целью рама машины должна быть поднята на первом этапе, по меньшей мере в задних перемещаемых блоках привода, до того, как рабочий барабан займет положение на некотором расстоянии от поверхности дороги. Для того чтобы защищать рабочий барабан, далее, например, деревянная балка должна быть сдвинута под рабочий барабан так, чтобы он не опирался на землю и отсутствовала возможность повреждения фрезерных инструментов, когда поворачиваемый блок привода поднимается для того, чтобы иметь возможность поворачивать его, не имея контакта с поверхностью земли.
Поэтому задача изобретения заключается в предложении дорожной фрезерной машины и способа поворота блока привода дорожной фрезерной машины, конструкция которой упрощена с одной стороны и которая проще и быстрее для работы - с другой.
Вышеуказанная задача решается с помощью признаков пунктов 1 и 13 формулы изобретения соответственно.
Изобретение предпочтительно обеспечивает привод перемещения поворачиваемого перемещаемого блока привода для образования первого приводного устройства для поворотного перемещения поворотного рычага. Таким образом, оно предназначено для поворотного рычага, чтобы не содержать отдельное, свое приводное устройство, и для привода перемещения, используемого для поворота поворотного рычага с подъемной колонной и перемещаемым блоком привода, в то время как перемещаемый блок привода находится в контакте с поверхностью земли. В результате, больше нет необходимости поднимать раму машины дорожной фрезерной машины и размещать защитное устройство под фрезерным барабаном для того, чтобы далее иметь возможность выводить поворачиваемый перемещаемый блок привода из контакта с поверхностью земли. Точнее, всего лишь необходимо, чтобы рабочий барабан больше не находился в резании, в то время как контакт с поверхностью земли поворачиваемого перемещаемого блока привода поддерживается и даже требуется для того, чтобы иметь возможность выполнять поворотное перемещение.
Контроллер может координировать привод перемещения и угол поворота поворотного перемещаемого блока привода таким образом, что перемещаемый блок привода является перемещаемым по дуге окружности из первого внешнего крайнего положения, выступающего относительно рамы машины, во второе внутреннее крайнее положение и обратно, находясь в постоянном контакте с поверхностью земли. В ходе этого процесса контроллер для перемещения блока привода из одного крайнего положения в другое может приводить в движение рулевое устройство автоматически, пока перемещаемый блок привода не будет выровнен по существу ортогонально поворотному рычагу. В этом положении контроллер управляет приводом перемещения автоматически для того, чтобы выполнять поворотное перемещение поворотного рычага к другому крайнему положению для того, чтобы далее в другом крайнем положении приводить в действие контроллер рулевого управления снова, пока перемещаемый блок привода не будет вновь выровнен для перемещения прямо вперед.
Это предпочтительно предназначено для поворачиваемой подъемной колонны, соединяемой с рамой машины с помощью одного поворотного рычага. Такое решение требует меньшего количества элементов машин и может быть осуществлено более невосприимчивым к крутящему моменту образом.
Поворотная ось перемещаемого блока привода для регулирования угла поворота может быть коаксиальной или параллельной продольной оси подъемной колонны.
В предпочтительном варианте выполнения поворачиваемая подъемная колонна является блокируемой в не менее чем одном из крайних положений.
Поворачиваемая подъемная колонна может содержать верхнюю часть, которая в продольном направлении соединена с рамой машины в неподвижном положении, и телескопически выдвигаемую нижнюю часть с перемещаемым блоком привода, прикрепленным к нижнему концу указанной нижней части.
В этой конструкции рулевое устройство соединено с выдвигаемой нижней частью подъемной колонны невосприимчивым к крутящему моменту образом.
Перемещаемый блок привода, подъемная колонна или рулевое устройство могут содержать первые блокирующие механизмы, взаимодействующие с рамой машины во внутреннем крайнем положении, причем указанные блокирующие механизмы фиксируют поперечное расстояние перемещаемого блока привода до рамы машины с одной стороны, при этом позволяя регулирование угла поворота с другой.
Перемещаемый блок привода, подъемная колонна или рулевое устройство могут содержать вторые блокирующие механизмы, взаимодействующие с рамой машины во внешнем крайнем положении, причем указанные блокирующие механизмы фиксируют и поперечное расстояние перемещаемого блока привода до рамы машины, и угол поворота перемещаемого блока привода, ортогональный оси рабочего барабана.
Таким образом, возможно во внутреннем крайнем положении фиксировать боковое положение подъемной колонны относительно рамы машины, но, тем не менее, обеспечивать рулевое управление перемещаемого блока привода, в то время как возможно во внешнем крайнем положении фиксировать не только поперечное расстояние до рамы машины, но и угол поворота для выравнивания параллельно продольной оси рамы машины или ортогонально оси рабочего барабана соответственно.
Блокирующий механизм особенно предпочтительно может быть размещен на рулевом устройстве.
Первый и второй блокирующие механизмы могут содержать выемки в рулевом кольце рулевого устройства, причем при таком расположении не менее чем один элемент зацепления, выступающий из рамы машины, например болт, зацепляется с указанными выемками или могут содержать не менее чем один элемент зацепления, прикрепленный к рулевому кольцу, например болт, который зацепляется с выемками рамы машины.
В этой конструкции выемки открыты на одной стороне так, что элементы зацепления, например болты, являются вставляемыми в выемки.
Особенно предпочтительный вариант выполнения предназначен для первого и второго приводного устройства для того, чтобы иметь возможность перемещать блок привода из первого внешнего крайнего положения во второе внутреннее крайнее положение и обратно при сохранении направления перемещения блока привода. С этой целью рулевое устройство приводится в движение в одно из конечных положений таким образом, что направление перемещения блока привода сохраняется. Далее больше нет необходимости изменять направление вращения привода перемещения.
Задача согласно способу решается с помощью признаков пункта 13 формулы изобретения.
Перемещение блока привода из одного крайнего положения в другое осуществляют посредством координации угла поворота и, по меньшей мере, привода перемещения поворачиваемого перемещаемого блока привода, причем перемещаемый блок привода может перемещаться вдоль дуги окружности, имеющей радиус поворотного рычага, из первого внешнего крайнего положения во второе внутреннее крайнее положение и обратно.
С этой целью сначала выравнивают перемещаемый блок привода, начиная с первого крайнего положения, по существу ортогонально поворотному рычагу или радиусу поворотного рычага соответственно, далее привод перемещения, по меньшей мере, поворачиваемого перемещаемого блока привода приводят в движение для того, чтобы выполнять поворотное перемещение поворотного рычага в другое крайнее положение. В другом крайнем положении перемещаемый блок привода в дальнейшем снова устанавливают в его нейтральное положение прямо вперед, а именно в положение выравнивания, параллельное раме машины и ортогональное оси рабочего барабана.
В крайних положениях поворачиваемая подъемная колонна может быть заблокирована посредством поворота перемещаемого блока привода вокруг оси рулевого управления для регулирования угла поворота. Рулевое устройство также может, в связи с этим, использоваться для блокирования подъемной колонны на раме машины.
В процессе поворота поворачиваемой подъемной колонны привод перемещения поворачиваемого перемещаемого блока привода, по меньшей мере, может быть приведен в движение скоординированным образом при прямом или обратном перемещении.
Понятно, что приводы перемещения оставшегося заднего перемещаемого блока привода и/или передних перемещаемых блоков привода также могут быть приведены в движение.
Далее один вариант выполнения изобретения объясняется более подробно со ссылкой на чертежи, где
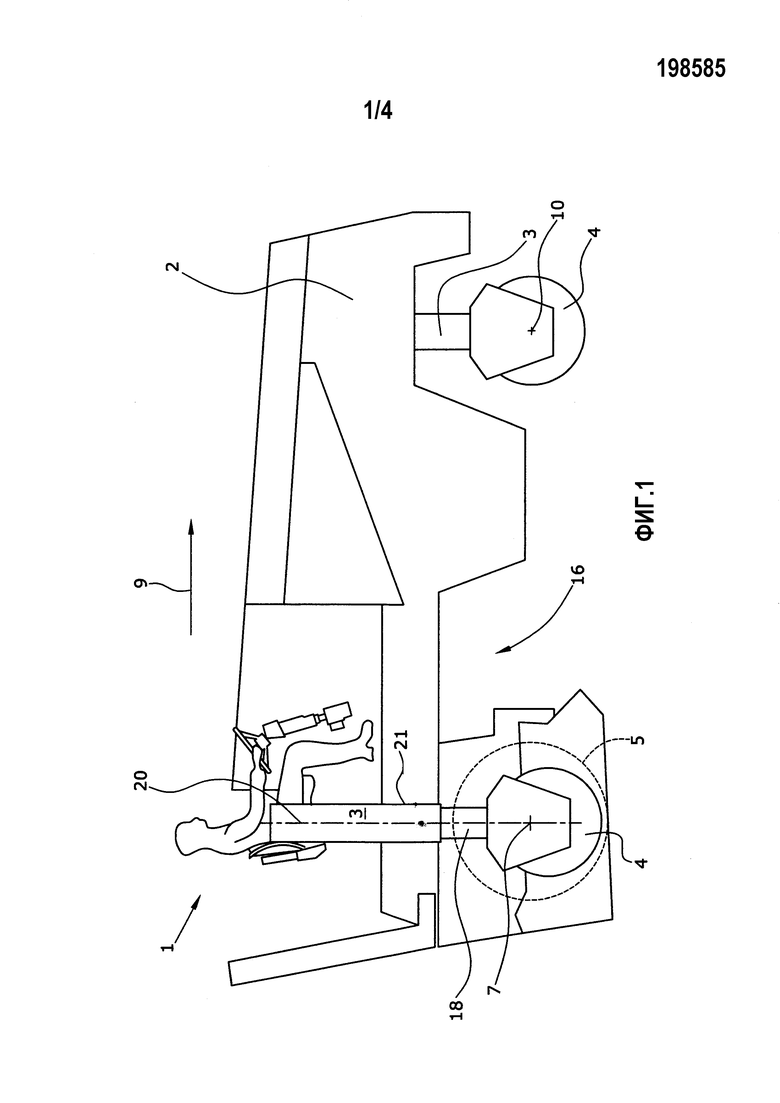
Фиг.1 представляет собой вид сбоку дорожной фрезерной машины с поворачиваемым приводом,
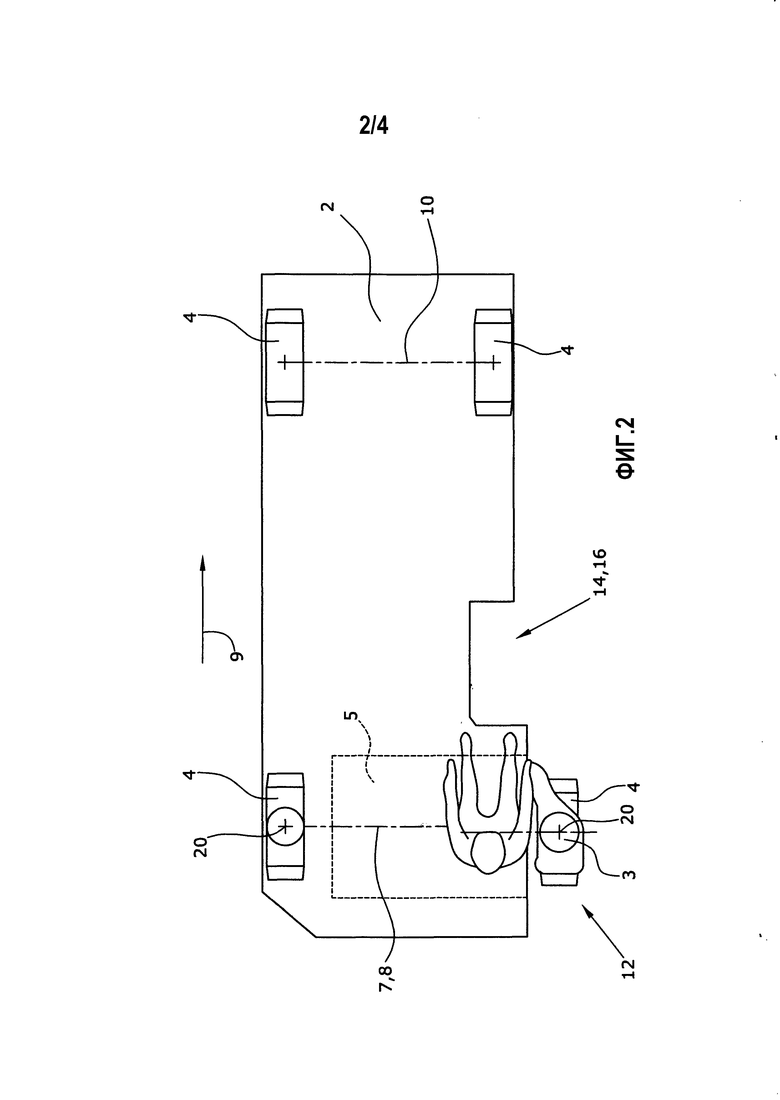
Фиг.2 представляет собой вид сверху дорожной фрезерной машины в соответствии с фиг.1,
Фиг.3 представляет собой вид в перспективе перемещаемого блока привода в виде опорного колеса,
Фиг.4 изображает поворотное перемещение и перемещение рулевого управления опорного колеса в соответствии с фиг.3,
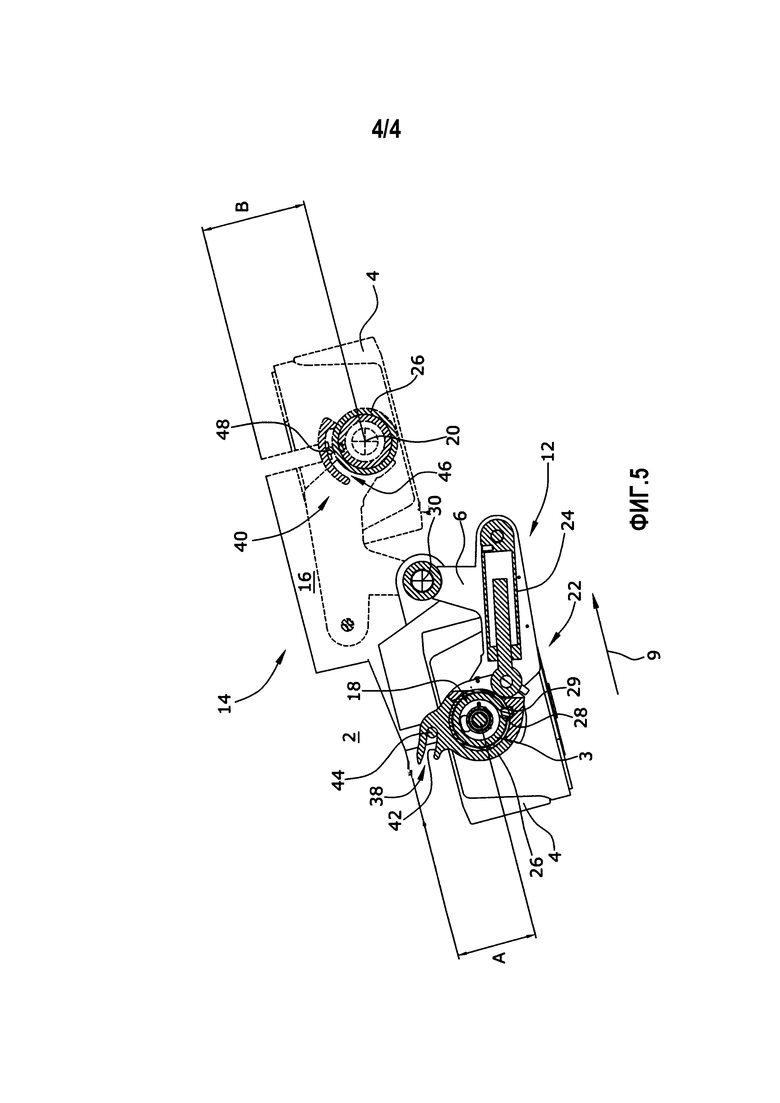
Фиг.5 представляет собой сечение подъемной колонны в соответственных крайних положениях.
Фиг.1 изображает самоходную дорожную фрезерную машину 1 с рамой 2 машины, которая является регулируемой по высоте с помощью подъемных колонн 3. Рабочий барабан 5 установлен на раме 2 машины с возможностью вращения вокруг оси 7 рабочего барабана и обычно поднимается или опускается вместе с рамой 2 машины. Альтернативно, сам рабочий барабан 5 также может быть регулируемым по высоте в отношении рамы 2 машины.
Подъемные колонны 3 могут предполагаться и на задней оси 8 и на передней оси 10. Ось 7 рабочего барабана предпочтительно продолжается в той же вертикальной плоскости, что и задняя ось 8 задних перемещаемых блоков 4 привода.
На фиг.1-5 перемещаемые блоки 4 привода показаны в виде перемещаемых колесных блоков привода. Они могут быть заменены на перемещаемые гусеничные блоки привода вместе или по отдельности.
Перемещаемые блоки 4 привода расположены на нижних концах 18 подъемных колонн 3. В нормальном рабочем положении, которое может быть видно на фиг.2, задняя ось 8 продолжается коаксиально осям задних перемещаемых колесных блоков 4 привода и в той же вертикальной плоскости, что и ось 7 рабочего барабана и продольные оси 20 задних подъемных колонн 3.
Как видно из фиг.2, в этом варианте выполнения предполагается общее количество перемещаемых колесных блоков привода, равное четырем, причем указанные перемещаемые колесные блоки привода поддерживают раму 2 машины. Передние перемещаемые колесные блоки привода также могут быть заменены одним центральным перемещаемым колесным блоком привода.
Задний перемещаемый блок 4 привода, расположенный справа, если смотреть в направлении перемещения 9, может быть повернут, начиная от нормального рабочего положения, которое изображено на фиг.2, из первого внешнего крайнего положения 12 во внутреннее второе крайнее положение 14, в котором перемещаемый блок 4 привода расположен по существу внутри выемки 16 рамы 2 машины. Во внутреннем крайнем положении 14 дорожная фрезерная машина 1 может быть направлена близко вдоль препятствий с его рабочим барабаном 5.
Фиг.3 показывает вид в перспективе подъемной колонны 3 с перемещаемым колесным блоком 4 привода, причем указанная подъемная колонна 3 соединена шарнирно на поворотном рычаге 6 на раме 2 машины. На нижней части 18 подъемной колонны 3 перемещаемый колесный блок 4 привода установлен регулируемым по высоте образом. Перемещаемый колесный блок 4 привода является ориентируемым вокруг продольной оси 20 подъемной колонны 3 посредством рулевого устройства 22. Нижняя часть 18 подъемной колонны 3, в связи с этим, является вращаемой и сдвигаемой в пределах верхней части 21 подъемной колонны 3.
Рулевое устройство 22 содержит рулевой цилиндр 24, который размещен внутри поворотного рычага 6 и может воздействовать на рулевое кольцо 26, которое может зацепляться с пазом 28 подъемной колонны 3 так, что перемещаемый блок 4 привода может поворачиваться вокруг продольной оси 20 подъемной колонны 3. В показанном варианте выполнения продольная ось 20, в связи с этим, образует ось рулевого управления для перемещаемого блока 4 привода.
Поворотный рычаг 6 является поворачиваемым вокруг поворотной оси 30, размещенной на раме 2 машины, причем указанная поворотная ось 30 продолжается параллельно продольной оси 20 подъемной колонны 3.
Фиг.4 показывает последовательность перемещений блока колесного привода из первого внешнего крайнего положения 12 во второе внутреннее крайнее положение 14 в выемке 16 рамы 2 машины.
Как может быть видно из фиг.4, поворот перемещаемого блока 4 привода начинают с того, что перемещаемый колесный блок привода поворачивают посредством рулевого устройства 22, пока он не будет ортогонален радиусу 34 поворота поворотного рычага 6. Далее приводят в движение привод 36 перемещения колесного блока привода, и перемещаемый колесный блок привода перемещают вдоль дуги 32 окружности, имеющей радиус 34 поворота, во второе крайнее положение 14, в котором рулевым устройством 22 управляют вновь для того, чтобы повторно выравнивать перемещаемый колесный блок 4 привода с направлением перемещения 9.
Если направление перемещения колесного блока 9 привода сохраняется, изменение направления вращения привода 36 перемещения 36 может быть исключено.
За счет скоординированной или последовательной работы контроллера рулевого устройства 22 и привода 36 перемещения поворот перемещаемого блока 4 привода является возможным без отдельного приводного устройства для поворотного рычага 6, и при этом перемещаемый блок 4 привода сохраняет контакт с поверхностью земли. Это перемещение может быть осуществлено либо скоординированным или последовательным образом, то есть сначала управляют рулем, далее перемещают (поворачивают) по дуге окружности и далее снова управляют рулем. В случае координированного управления отмеченные последовательные этапы могут частично также происходить одновременно, то есть перекрывающимся образом.
Фиг.5 показывает сечение подъемной колонны 3 в двух различных плоскостях рулевого кольца 26, которое содержит первый и второй блокирующие механизмы 38, 40 для внутреннего и внешнего крайних положений 12, 14 соответственно.
Для простоты оба крайних положения проиллюстрированы на фиг.5. В первом внешнем крайнем положении 12 соединение рулевого цилиндра 24 с рулевым кольцом 26 может быть видно на фиг.5, причем указанное рулевое кольцо 26 зацепляется с пазом 28 в нижней части 18 подъемной колонны 3 посредством пазовой гайки 29. В связи с этим работа рулевого цилиндра 24 позволяет рулевому кольцу 26 поворачиваться. На его стороне, обращенной к раме 2 машины, рулевое кольцо 26 обеспечено выемкой 42, которая может вмещать первый болт 44, прикрепленный к раме 2 машины в неподвижном положении. В этой конструкции выемка 42 выровнена таким образом, что при работе рулевого устройства 22 болт 44 может быть размещен в выемке 42. Когда болт 44 расположен на конце выемки 42, перемещаемый блок 4 привода выровнен и зафиксирован параллельно направлению перемещения 9, в этом случае перемещаемый колесный блок привода далее также размещается на поперечном фиксированном расстоянии A от рамы 2 машины.
Во внутреннем втором крайнем положении 14 второй блокирующий элемент 40 размещен во второй плоскости, продолжающейся ортогонально продольной оси 20 подъемной колонны 3, например, расположенной ниже плоскости выемки 42, причем указанный блокирующий элемент 40 содержит дугообразную выемку 46, которая отлита на рулевом кольце 26 и которая может быть зацеплена с болтом 48, выступающим из рамы 2 машины в неподвижном положении.
Посредством работы рулевого устройства 22 болт 48 также может быть вставлен в выемку 46 во втором крайнем положении 14. Дугообразное направление выемки 46 является таким, что независимо от текущего положения второго болта 48 перемещаемый блок 4 привода всегда размещается на одинаковом поперечном расстоянии B до рамы 2 машины. В связи с этим выемка 46 выполнена в форме дуги окружности, при этом центр окружности находится на продольной оси 20 подъемной колонны 3.
В связи с этим во втором внутреннем крайнем положении 14 возможно сохранять подъемную колонну 3 на постоянном поперечном расстоянии от рамы 2 машины при одновременном рулевом управлении перемещаемым блоком 4 привода.

Изобретение относится к дорожной фрезерной машине. Дорожная фрезерная машина содержит контроллер для выполнения операций перемещения, рулевого управления и фрезерования, раму (2), регулируемую по высоте с помощью подъемных колонн (3), шасси с, по меньшей мере, задними перемещаемыми блоками (4) привода перемещения. Каждый блок снабжен приводом (36) перемещения. Блоки (4) расположены на нижних концах (18) подъемных колонн (3). Рабочий барабан (5) размещен на раме (2) машины. Поворотный рычаг (6) выполнен с возможностью поворота вокруг поворотной оси (30). Поворотный рычаг (6) соединяет заднюю подъемную колонну (3) с рамой (2) машины поворачиваемым образом и перемещает блок (4) привода из первого внешнего крайнего положения (12) во второе внутреннее крайнее положение (14) и обратно. Привод (36) перемещения поворотного перемещаемого блока (4) предназначен для использования в качестве первого приводного устройства, воздействующего на поворотный рычаг (6) для поворотного перемещения поворотного рычага (6). Контроллер выполнен с возможностью регулирования привода (36) перемещения поворотного перемещаемого блока (4) привода и угла поворота поворотного перемещаемого блока (4) привода таким образом, что поворотный перемещаемый блок (4) привода является перемещаемым из первого внешнего крайнего положения (12) во второе внутреннее крайнее положение (14) и обратно. Поворотный перемещаемый блок (4) привода находится в постоянном контакте с поверхностью земли. Способ поворота внутрь и наружу поворотного перемещаемого блока (4) привода дорожной фрезерной машины (1) содержит этап, на котором используют привод (36) перемещения поворотного перемещаемого блока (4) привода для поворота поворотного рычага (6) из одного крайнего положения (12; 14) в другое крайнее положение (14; 12), при этом поворотный перемещаемый блок (4) привода находится в постоянном контакте с поверхностью земли, а также этап, на котором управляют углом поворота и, по меньшей мере, приводом (36) перемещения поворотного перемещаемого блока (4) привода таким образом, что поворотный перемещаемый блок (4) привода может перемещаться из первого внешнего крайнего положения (12) во второе внутреннее крайнее положение (14) и обратно. 2 н. и 18 з.п. ф-лы, 5 ил.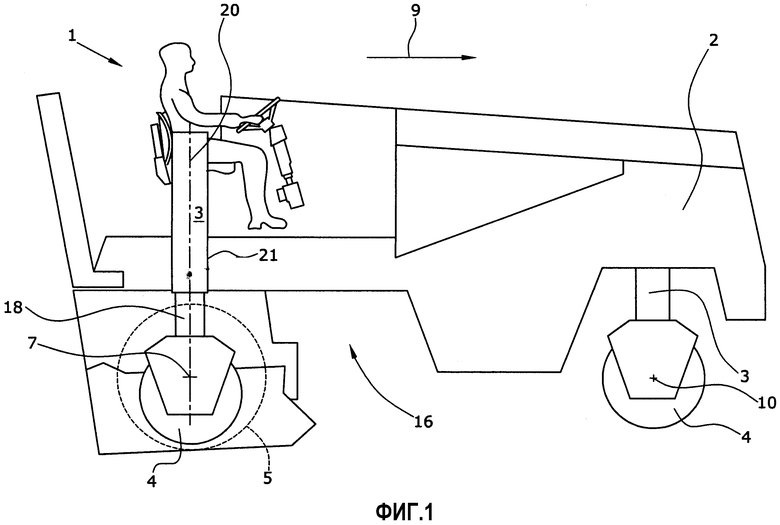
1. Дорожная фрезерная машина (1) для обработки дорожных покрытий, содержащая контроллер для выполнения операций перемещения, рулевого управления и фрезерования, раму (2) машины, регулируемую по высоте с помощью подъемных колонн (3), шасси с, по меньшей мере, задними перемещаемыми блоками (4) привода в направлении перемещения, причем каждый блок снабжен приводом (36) перемещения, при этом перемещаемые блоки (4) привода расположены на нижних концах (18) подъемных колонн (3), имеющих продольную ось (20), рабочий барабан (5), размещенный на раме (2) машины для вращения вокруг оси (7) рабочего барабана, поворотный рычаг (6), выполненный с возможностью поворота вокруг поворотной оси (30), продолжающейся параллельно продольной оси (20) подъемной колонны (3), причем поворотный рычаг (6) соединяет заднюю подъемную колонну (3) с рамой (2) машины поворачиваемым образом и перемещает блок (4) привода из первого внешнего крайнего положения (12), выступающего поперечно относительно рамы (2) машины, во второе внутреннее крайнее положение (14) и обратно, рулевое устройство (22) для поворотного перемещаемого блока (4) привода, первое приводное устройство, воздействующее на поворотный рычаг (6), второе приводное устройство, воздействующее на рулевое устройство (22), посредством которого угол поворота поворотного перемещаемого блока (4) привода является регулируемым, отличающаяся тем, что привод (36) перемещения поворотного перемещаемого блока (4) привода предназначен для использования в качестве первого приводного устройства, воздействующего на поворотный рычаг (6) для поворотного перемещения поворотного рычага (6), при этом контроллер выполнен с возможностью регулирования привода (36) перемещения поворотного перемещаемого блока (4) привода и угла поворота поворотного перемещаемого блока (4) привода таким образом, что поворотный перемещаемый блок (4) привода является перемещаемым из первого внешнего крайнего положения (12), выступающего относительно рамы (2) машины, во второе внутреннее крайнее положение (14) и обратно, причем поворотный перемещаемый блок (4) привода находится в постоянном контакте с поверхностью земли.
2. Машина по п. 1, отличающаяся тем, что контроллер для перемещения поворотного перемещаемого блока (4) привода из одного крайнего положения (12) в другое (14) приводит в движение рулевое устройство (22), пока поворотный перемещаемый блок (4) привода не будет выровнен по существу ортогонально поворотному рычагу (6), в этом положении приводится в движение привод (36) перемещения для осуществления поворотного перемещения поворотного рычага (6) в другое крайнее положение (14) и в другом крайнем положении (14) снова приводится в действие контроллер рулевого управления для повторного размещения перемещаемого блока (4) привода в положение прямо вперед.
3. Машина по п. 1, отличающаяся тем, что поворотная подъемная колонна (3) соединена с рамой (2) машины с помощью одного поворотного рычага (6).
4. Машина по п. 1, отличающаяся тем, что ось рулевого управления поворотного перемещаемого блока (4) привода для регулирования угла поворота является коаксиальной или параллельной продольной оси (20) подъемной колонны (3).
5. Машина по п. 1, отличающаяся тем, что поворотная подъемная колонна (3) является блокируемой в по меньшей мере одном из крайних положений (12, 14).
6. Машина по п. 1, отличающаяся тем, что поворотная подъемная колонна (3) содержит верхнюю часть, которая в продольном направлении соединена с рамой (2) машины (2) в неподвижном положении, и телескопически выдвигаемую нижнюю часть с поворотным перемещаемым блоком (4) привода, прикрепленным к нижнему концу (18) указанной нижней части, при этом рулевое устройство (22) соединено с выдвигаемой нижней частью (18) подъемной колонны (3) невосприимчивым к крутящему моменту образом.
7. Машина по п. 1, отличающаяся тем, что поворотный перемещаемый блок (4) привода, подъемная колонна (3) или рулевое устройство (22) содержат первые блокирующие механизмы (38), взаимодействующие с рамой (2) машины во внешнем крайнем положении (12), причем указанные блокирующие механизмы (38) фиксируют и поперечное расстояние А поворотного перемещаемого блока (4) привода от рамы машины, и угол поворота, ортогональный оси (7) рабочего барабана.
8. Машина по п. 1, отличающаяся тем, что поворотный перемещаемый блок (4) привода, подъемная колонна (3) или рулевое устройство (22) содержат вторые блокирующие механизмы (40), выполненные с возможностью взаимодействия с рамой (2) машины во внутреннем крайнем положении (14), причем указанные блокирующие механизмы (40) фиксируют поперечное расстояние В поворотного перемещаемого блока (4) от рамы (2) машины и обеспечивают регулирование угла поворота.
9. Машина по п. 1, отличающаяся тем, что блокирующие механизмы (38, 40) расположены на рулевом кольце (26) рулевого устройства (22).
10. Машина по п. 9, отличающаяся тем, что первые и вторые блокирующие механизмы (38, 40) содержат выемки (42, 46) в рулевом кольце (26), причем не менее чем один элемент (44, 48) зацепления, выступающий из рамы (2) машины, зацепляется с указанными выемками (42, 46) или содержат не менее чем один элемент зацепления, прикрепленный к рулевому кольцу (26), который зацепляется с выемками рамы (2) машины.
11. Машина по п. 1, отличающаяся тем, что первое и второе приводные устройства выполнены с возможностью перемещения поворотного перемещаемого блока (4) привода из первого внешнего крайнего положения (12) во второе внутреннее крайнее положение (14) и обратно при сохранении направления перемещения повоотного перемещаемого блока (4) привода в крайних положениях (12, 14).
12. Машина по п. 1, отличающаяся тем, что поворотный перемещаемый блок (4) привода выполнен с возможностью перемещения по дуге окружности (32).
13. Способ поворота внутрь и наружу поворотного перемещаемого блока (4) привода дорожной фрезерной машины (1), содержащей
раму (2) машины, регулируемую по высоте с помощью подъемных колонн (3),
шасси с, по меньшей мере, задними перемещаемыми блоками (4) привода в направлении перемещения, причем каждый блок снабжен приводом (36) перемещения, при этом перемещаемые блоки (4) привода расположены на нижних концах (18) подъемных колонн (3),
рабочий барабан (5), размещенный на раме (2) машины с возможностью вращения вокруг оси (7) рабочего барабана, с контроллером для выполнений операции перемещения, рулевого управления и фрезерования, причем для фрезерования вдоль препятствий заднюю подъемную колонну (3), соединенную с рамой (2) машины с помощью поворотного рычага (6), перемещают из первого внешнего крайнего положения (12), выступающего поперечно относительно рамы (2) машины, для нормальной операции фрезерования ко второму внутреннему крайнему положению (14) для фрезерования близко к краю,
причем угол поворота для поворотного перемещаемого блока (4) привода может регулироваться, по меньшей мере, во внутреннем крайнем положении (14), отличающийся тем, что содержит этап, на котором используют привод (36) перемещения поворотного перемещаемого блока (4) привода для поворота поворотного рычага (6) из одного крайнего положения (12; 14) в другое крайнее положение (14; 12) соответственно, при этом поворотный перемещаемый блок (4) привода находится в постоянном контакте с поверхностью земли, а также этап, на котором управляют углом поворота и, по меньшей мере, приводом (36) перемещения поворотного перемещаемого блока (4) привода таким образом, что поворотный перемещаемый блок (4) привода может перемещаться из первого внешнего крайнего положения (12), выступающего относительно рамы (2) машины, во второе внутреннее крайнее положение (14) и обратно.
14. Способ по п. 13, отличающийся тем, что содержит этап, на котором перемещают поворотный перемещаемый блок (4) привода из одного крайнего положения (12; 14) в другое крайнее положение (14; 12) соответственно, при этом поворотный перемещаемый блок (4) привода сначала выравнивают по существу ортогонально поворотному рычагу (6), далее, по меньшей мере, привод (36) перемещения поворотного перемещаемого блока (4) привода приводят в движение для осуществления поворотного перемещения поворотного рычага (6) в другое крайнее положение (14; 12), причем в другом крайнем положении (14; 12) поворотный перемещаемый блок (4) привода повторно устанавливают в положение прямо вперед.
15. Способ по п. 13, отличающийся тем, что содержит этап, на котором блокируют поворотный перемещаемый блок (4) привода во внутреннем крайнем положении (14), причем при таком расположении поперечное расстояние В поворотного перемещаемого блока (4) привода от рамы (2) машины фиксируют при сохранении возможности регулирования угла поворота.
16. Способ по п. 13, отличающийся тем, что содержит этап, на котором блокируют поворотный перемещаемый блок (4) привода во внешнем крайнем положении (12), причем при таком расположении фиксируют поперечное расстояние А поворотного перемещаемого блока (4) привода от рамы (2) машины и угол поворота, ортогональный оси (7) рабочего барабана.
17. Способ по п. 13, отличающийся тем, что рулевое кольцо (26), взаимодействующее с подъемной колонной (3), для рулевого управления используют для блокировки поворотного перемещаемого блока (4) привода в крайних положениях (12, 14).
18. Способ по п. 13, отличающийся тем, что поворачиваемую подъемную колонну (3) фиксируют в крайних положениях (12, 14) посредством поворота перемещаемого блока (4) привода вокруг оси рулевого управления для регулирования угла поворота.
19. Способ по п. 13, отличающийся тем, что в процессе поворота поворачиваемой подъемной колонны (3), по меньшей мере, привод (14) перемещения заднего поворотного перемещаемого блока (4) привода приводят в движение скоординированным образом при прямом или обратном перемещении.
20. Способ по п. 13, отличающийся тем, что перемещаемый блок (4) привода перемещают вдоль дуги окружности (32), имеющей радиус поворотного рычага (6).
| US6106073 A, 22.08.2000 | |||
| Самоходное транспортное средство | 1978 |
|
SU812634A1 |
| Машина для фрезерования бетона | 1985 |
|
SU1293265A1 |
| Прибор для нанизывания табачных листьев | 1931 |
|
SU27323A1 |
| US 5893677 A, 13.04.1999. | |||

