ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
По настоящей заявке испрашивается приоритет на основе предварительной заявки на патент США № 62/561991, поданной 22 сентября 2017 года.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к дорожной фрезерной машине, снабженной системой для регулирования высоты подъема подъемных колонн дорожной фрезерной машины в процессе работы. Более конкретно, настоящее изобретение включает систему для автоматической установки всех подъемных колонн в вертикальном положении с целью обеспечения контроля за точным уклоном фрезеруемой поверхности.
ПРЕДПОСЫЛКИ К СОЗДАНИЮ ИЗОБРЕТЕНИЯ И ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Зачастую ремонт дороги выполняется путем усиления слоев дорожной одежды существующего дорожного покрытия (с использованием либо бетона, либо битума для дорожного покрытия) за счет укладки нового слоя (зачастую называемого «выравнивающим слоем покрытия») бетонного или битумного материала для дорожного покрытия. Тем не менее, без предварительной обработки поверхности указанный способ дорожного ремонта в целом приводит к нанесению недостаточного количества материала для дорожного покрытия на участки, разбитые проходящим транспортом, с выбоинами или иным образом поврежденные участки, так как дополнительный верхний слой дорожной одежды будет нанесен с той же самой скоростью на единицу ширины дороги на поврежденных участках (которые характеризуются большей глубиной выбоин по ширине, которые необходимо заполнить материалом для дорожного покрытия), как и на неповрежденных участках. Из-за пониженной толщины нанесенного верхнего слоя покрытия на ранее поврежденные участки на новом дорожном покрытии вновь образуются колеи или покрытие будет иным образом повреждено вследствие износа в течение непродолжительного периода времени. Тем не менее, за счет фрезерования поверхности поврежденного дорожного покрытия до одинакового уровня по высоте поверхности ниже уровня поврежденных участков при укладке нового слоя дорожного покрытия обеспечивается создание равномерного по высоте вновь уложенного дополнительного слоя дорожного покрытия по всей ширине поверхности дорожного полотна. Указанный способ обновления дорожного покрытия может быть использован с целью достижения первоначальных высотных отметок поврежденного дорожного полотна, в то время как укладка выравнивающего слоя асфальтобетонного покрытия поверх поврежденного, но нефрезерованного дорожного покрытия, зачастую приводит к увеличению высоты поверхности дороги или к превышению первоначальных высотных отметок некоторых участков дорожного полотна. Ремонт дорожного полотна без фрезерования может привести к необходимости увеличения высоты придорожной полосы, дорожного ограждения и крышек люков, а также к корректировке габаритов эстакад по высоте, что исключается при использовании надлежащего способа фрезерования. Применение фрезерования до обновления дорожного покрытия также позволяет достичь надлежащего продольного и поперечного уклона дороги и тем самым избежать проблем дорожного дренажа и безопасности. Кроме того, фрезерование, как правило, позволяет создать грубую поверхность, обеспечивающую укладку и прочное связывание с новым слоем асфальта или иного поверхностного слоя дорожной одежды. Наконец, фрезерование позволяет получить сырьевой материал, который может быть переработан и утилизирован при производстве новых материалов для дорожного покрытия.
Дорожная фрезерная машина, как правило, представляет собой транспортное средство на колесном или гусеничном ходу, снабженное фрезерным барабаном, включающим несколько режущих зубьев, установленных по окружности фрезерного барабана, при этом фрезерный барабан установлен в корпусе барабана на раме машины с возможностью вращения в основном вокруг горизонтальной оси. Управляемые узлы привода ходовой части колесной или гусеничной машины, приводимые в действие гидравлическими двигателями, предназначены для перемещения дорожной фрезерной машины в направлении фрезерования и управления машиной по требуемой траектории фрезерования. Узлы привода присоединены к подъемным колоннам, включающим размещенные внутри них линейные исполнительные механизмы, которые могут быть приведены в действие для подъема и опускания рамы дорожной фрезерной машины по отношению к поверхности дорожного полотна. Дорожная фрезерная машина на колесном ходу включает четыре узла привода колес – один на левой передней стороне, один на правой передней стороне, один на левой задней стороне и один на правой задней стороне. Дорожные фрезерные машины на гусеничном ходу снабжены тремя или четырьмя узлами привода ходовой части гусеничной машины, включающими один на левой передней стороне и один на правой передней стороне. Некоторые указанные дорожные фрезерные машины также включают третий узел привода ходовой части гусеничной машины на левой задней стороне и четвертый узел привода ходовой части гусеничной машины на правой задней стороне; тем не менее, некоторые дорожные фрезерные машины на гусеничном ходу снабжены только одним установленным по центру задним узлом привода.
Ввиду того, что фрезерный барабан установлен с возможностью вращения в корпусе на раме дорожной фрезерной машины, при подъеме рамы на подъемных колоннах обеспечивается подъем фрезерного барабана и вывод последнего из контакта с поверхностью дорожного полотна, и при опускании рамы на подъемных колоннах обеспечивается опускание фрезерного барабана до контакта с поверхностью дорожного полотна с целью проведения фрезерования до достижения требуемой глубины. Фрезерный барабан приводится во вращение главным узлом привода фрезерного барабана, как правило, включающим приводной ремень, который приводится в движение дизельным двигателем, при этом указанный приводной ремень входит в зацепление со шкивом на первичном приводном валу для фрезерного барабана. Редуктор, как правило, расположен между шкивом и фрезерным барабаном и включает узел шестерен и вторичный приводной вал, на котором фрезерный барабан приводится во вращение. Таким образом, редуктор обеспечивает вращение вторичного приводного вала для фрезерного барабана со скоростью вращения и крутящим моментом, отличающимися по скорости вращения и крутящего момента первичного приводного вала. Как правило, дорожная фрезерная машина может включать транспортировочную конвейерную систему, предназначенную для транспортировки измельченного материала, снятого фрезерованием с дорожного полотна при вращении фрезерного барабана, для складирования указанного материала спереди, позади или сбоку от машины для его последующей загрузки в грузовики и удаления с участка фрезерования. Мощность, необходимая для работы гидравлических двигателей, которые, как правило, используют для приведения транспортировочных конвейеров и узлов привода в действие, подается с дизельного двигателя.
Дорожный стабилизатор аналогичен дорожной фрезерной машине в том, что он включает транспортное средство на колесном или гусеничном ходу, снабженное вращающимся фрезерным барабаном, на котором установлено несколько фрезерных зубьев, при этом фрезерный барабан приводится во вращение главным узлом привода фрезерного барабана, как правило, включающим приводной ремень, который входит в зацепление со шкивом на первичном приводном валу для фрезерного барабана. Редуктор, как правило, расположен между шкивом и фрезерным барабаном и включает узел шестерен и вторичный приводной вал, на котором фрезерный барабан приводится во вращение. Таким образом, редуктор обеспечивает вращение вторичного приводного вала для фрезерного барабана со скоростью вращения и крутящим моментом, отличающимися по скорости вращения и крутящего момента первичного приводного вала. Узлы привода ходовой части колесного или гусеничного дорожного стабилизатора установлены на подъемных колоннах, внутри которых размещены линейные исполнительные механизмы, которые могут быть приведены в действие для подъема и опускания рамы машины по отношению к дорожной поверхности. При этом фрезерный барабан дорожного стабилизатора в целом используют для измельчения или размалывания существующего дорожного полотна, или дорожного покрытия на глубину, превышающую глубину фрезерования с помощью дорожной фрезерной машины, до обновления дорожного покрытия (обычно указанный процесс называется восстановлением), либо до начальной укладки дорожного покрытия (обычно называемой стабилизацией), и при этом измельченный материал не извлекается из участка фрезерования. Как правило, измельченный материал, оставленный на месте проведения дорожных работ, уплотняют и покрывают одним или несколькими дополнительными слоями дробленого заполнителя до проведения работ по устройству дорожной одежды.
Ввиду того, что принцип работы фрезерных барабанов и подъемных колонн дорожной фрезерной машины и дорожного стабилизатора является аналогичным для целей настоящего изобретения, термин «дорожная фрезерная машина» ниже будет использоваться как обобщенный термин для описания обоих типов машин.
Фрезерный барабан дорожной фрезерной машины частично заключен в корпус барабана, предотвращающий выбрасывание из дорожной фрезерной машины материала, срезаемого с поверхности, и, по меньшей мере, корпус частично обеспечивает подавление пыли, образующейся в процессе фрезерования, а также позволяет избежать неумышленного несанкционированного доступа к вращающемуся фрезерному барабану. Известные дорожные фрезерные машины включают торцевые заслонки на противоположных сторонах указанного корпуса, свободно перемещающиеся до уровня поверхности дорожного полотна или иной фрезеруемой поверхности, когда фрезерный барабан отрегулирован по высоте для обеспечения требуемой глубины фрезерования. Следовательно, торцевые заслонки перемещаются по нефрезерованной поверхности дорожного полотна за пределами полосы, срезанной фрезерным барабаном. Однако состояние дорожного полотна может измениться по мере перемещения дорожной фрезерной машины в процессе фрезерования поверхности. Таким образом, оператору необходимо постоянно контролировать и корректировать положение фрезерного барабана с целью поддержания требуемой глубины резания.
Известно применение датчиков, установленных на раме дорожной фрезерной машины, позволяющих оператору управлять выдвижением передних подъемных колонн; тем не менее, выдвижение задних подъемных колонн регулируется вручную оператором дорожной фрезерной машины без входных сигналов от датчика на начальном этапе процесса фрезерования и при необходимости проведения корректировок в процессе фрезерования. Существует необходимость в разработке автоматической системы для обеспечения автоматической регулировки выдвижения подъемных колонн на протяжении всего процесса фрезерования с целью регулирования подъема фрезерного барабана по высоте в процессе фрезерования.
ПРЕИМУЩЕСТВА ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Одно из преимуществ предпочтительного варианта осуществления настоящего изобретения заключается в том, что изобретение предусматривает создание системы для автоматического управления выдвижением подъемных колонн дорожной фрезерной машины с целью регулирования высоты подъема фрезерного барабана в процессе фрезерования. Дополнительные цели и преимущества настоящего изобретения станут очевидными на основе последующего подробного описания изобретения, рассмотренного вместе с чертежамиками.
ПРИМЕЧАНИЯ ПО ТОЛКОВАНИЮ ТЕРМИНОВ
Термины «содержащий», «имеющий», «включающий» и «заключающий в своем составе» следует истолковывать как неограничивающие термины (т.е. означающие «включая, в частности»), если не указано иное. Термины «в основном», «в целом» и другие слова, указывающие на степень, являются относительными определениями, предназначенными для указания на допустимое отклонение от определяемой таким образом характеристики. Использование таких терминов при описании физических или функциональных характеристик настоящего изобретения не предназначено для ограничения такой характеристики до абсолютного значения, которое определяет термин, а скорее для обеспечения приближения значения такой физической или функциональной характеристики.
Термины, касающиеся присоединений, подключений и т.д., такие как «присоединенный», «подключенный», «соединенный» и «взаимосвязанный», относятся к взаимосвязи, при которой конструкции прикреплены или присоединены одна к другой либо непосредственно, либо косвенно с помощью промежуточных конструкций, а также представляют собой как подвижное, так и жесткое соединение или взаимосвязь, если не оговорено или ясно не указано иное в данном контексте. Термины «функционально соединен» и «функционально присоединенный» описывают такое присоединение, подключение или соединение, при котором обеспечивается работа соответствующих конструкций надлежащим образом в силу наличия такой взаимосвязи. Термин «гидравлическое соединение» относится к такому присоединению, прикреплению или соединению, которые обеспечивают перетекание жидкости из одной такой конструкции или компонента в другие или с помощью другой конструкции или компонента.
Использование всех примеров или пояснительного языка (например, «такой как» и «предпочтительно») в настоящем контексте предназначено исключительно для более полной иллюстрации настоящего изобретения и его предпочтительных вариантов осуществления, а не для ограничения объема настоящего изобретения. Ничто в описании настоящего изобретения не должно истолковываться как указывающее на любой элемент в качестве основного для реализации настоящего изобретения, если конкретно не указано иное. В настоящем контексте дано конкретное определение ряда терминов. Указанным терминам дается их максимально широкое толкование, соответствующее определениям, приведенным ниже:
Термин «дорожная фрезерная машина» относится к транспортному средству, снабженному фрезерным барабаном, предназначенным для придания ему вращательного движения с целью врезания в поверхность, на которой эксплуатируют транспортное средство, и данный термин включает машины, как правило, называемые дорожные фрезерные машины, холодные планировщики дорожного покрытия, дорожные стабилизаторы и машины для холодной регенерации дорожных покрытий.
Термин «направление фрезерования» относится к направлению главного перемещения дорожной фрезерной машины в процессе ее работы на дороге.
Термины «перед», «передний» и аналогичные термины при их использовании по отношению к дорожной фрезерной машине или к компоненту такой машины, означают относительное местоположение или направление к переднему концу дорожной фрезерной машины при ее перемещении в направлении фрезерования.
Термины «задняя часть», «позади» и аналогичные термины при их использовании по отношению к дорожной фрезерной машине или к компоненту такой машины, означают относительное местоположение или направление к заднему концу рабочей машины при перемещении дорожной фрезерной машины в направлении фрезерования.
Термины «верхний», «верхняя часть», «над» и аналогичные термины при их использовании по отношению к относительному местоположению или направлению дорожной фрезерной машины или по отношению к дорожной фрезерной машине, или к компоненту или части такой машины, относятся к относительному положению или направлению, находящимся на более удаленном расстоянии от поверхности, на которой размещена дорожная фрезерная машина для проведения работ.
Термины «нижний», «нижняя часть», «под» и аналогичные термины при их использовании по отношению к относительному местоположению или направлению дорожной фрезерной машины или по отношению к дорожной фрезерной машине, или к компоненту или части такой машины, относятся к относительному положению или направлению, находящимся на более близком расстоянии к поверхности, на которой размещена дорожная фрезерная машина для проведения работ.
Термин «левый» при его использовании в данном контексте для описания направления или относительного положения дорожной фрезерной машины, либо узла, компонента или части такой машины относится к положению или ориентации в направлении влево, если смотреть со стороны оператора, управляющего рабочей машиной при ее движении в рабочем направлении.
Термин «правый» при его использовании в данном контексте для описания направления или относительного положения дорожной фрезерной машины либо ее узла, компонента или части такой машины относится к положению или ориентации в направлении вправо, если смотреть со стороны оператора, управляющего рабочей машиной при ее движении в рабочем направлении.
Термины «линейный исполнительный механизм» и «исполнительный механизм» относится к электрическому, пневматическому, гидравлическому, электрогидравлическому или механическому устройству, создающему усилие, направленное по прямой линии. Типичным примером «линейного исполнительного механизма» является силовой гидравлический привод, включающий цилиндр, поршень, размещенный внутри цилиндра, и шток, присоединенный к поршню. При создании повышенного давления внутри цилиндра на одной из сторон поршня (превышающее давление на противоположной стороне поршня) шток выдвигается из цилиндра или втягивается в цилиндр.
Термины «линейный исполнительный механизм/датчик» и «исполнительный механизм/датчик» относятся к линейному исполнительному механизму, соединенному с соответствующим датчиком положения, таким как внутренний преобразователь линейных перемещений или внешний преобразователь линейных перемещений, предназначенный для измерения выдвижения штока исполнительного механизма и для передачи сигнала, указывающего на выдвижение штока, на контроллер или на процессор компьютера, с которым функционально соединен исполнительный механизм/датчик.
Термин «датчик положения по высоте» может относиться к датчику положения исполнительного механизма/датчика, используемому для корректировки положения торцевой заслонки по высоте и (или) к отдельному датчику, предназначенному для определения положения по высоте или вертикального положения торцевой заслонки дорожной фрезерной машины, выдвижения линейного исполнительного механизма в подъемной колонне или положения по высоте рамы по отношению к подъемной колонне. «Датчик положения по высоте» может быть соединен с линейным исполнительным механизмом, используемым для корректировки положения по высоте торцевой заслонки или рамы на подъемной колонне.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Настоящее изобретение включает систему для автоматического управления положением по высоте фрезерного барабана дорожной фрезерной машины в процессе ее работы по фрезерованию поверхности дорожного полотна. Дорожная фрезерная машина включает корпус фрезерного барабана. Левая и правая торцевые заслонки присоединены к корпусу и предназначены в основном для вертикального перемещения по отношению к корпусу. Дорожная фрезерная машина включает контроллер и четыре датчика положения по высоте, которые соединены с левой и правой торцевыми заслонками. Предпочтительно, чтобы первый датчик положения по высоте располагался на переднем конце левой торцевой заслонки, и второй датчик располагался на переднем конце правой торцевой заслонки. Третий датчик положения по высоте расположен на заднем конце левой торцевой заслонки, и четвертый датчик положения по высоте расположен на заднем конце правой торцевой заслонки. Контроллер функционально соединен с четырьмя датчиками положения по высоте и с линейными исполнительными механизмами, размещенными внутри передних и задних подъемных колонн дорожной фрезерной машины.
Датчик положения по высоте, расположенный на переднем конце правой торцевой заслонки, обеспечивает обратную связь для регулирования положения правой передней подъемной колонны, и датчик положения по высоте, расположенный на переднем конце левой торцевой заслонки, обеспечивает обратную связь для регулирования положения левой передней подъемной колонны. По выбору оператора датчики положения по высоте, расположенные на задних концах торцевых заслонок, предназначены для обеспечения обратной связи для регулирования положений правой и левой передних подъемных колонн, а также правой и левой задних подъемных колонн, если дорожная фрезерная машина снабжена двумя задними подъемными колоннами (ввиду того, что линейные исполнительные механизмы в двух подъемных колоннах включены в одну и ту же гидравлическую систему, и их работа взаимосвязана) или центрально расположенной задней подъемной колонной, если дорожная фрезерная машина снабжена только одной задней подъемной колонной.
Оператор устанавливает требуемую глубину фрезерования, и контроллер приводит в действие подъемные колонны для расположения фрезерного барабана по отношению к поверхности дорожного полотна для обеспечения требуемой глубины фрезерования. Правая и левая торцевые заслонки под влиянием силы тяжести перемещаются вниз до упора в поверхность дорожного полотна. Оператор также выбирает правую сторону или левую сторону дорожной фрезерной машины, предпочтительно в зависимости от того, какая торцевая заслонка (правая или левая) является более устойчивой на поверхности, и передает данные о своем выборе на контроллер. В предпочтительном варианте осуществления настоящего изобретения контроллер усредняет измеренные значения положения по высоте полученные как с переднего, так и заднего датчика положения по высоте торцевой заслонки, на стороне, не выбранной оператором (т.е. на стороне, которая находится на менее устойчивой поверхности), и использует данную информацию для обеспечения непрерывного управления линейным исполнительным механизмом в передней подъемной колонне на невыбранной стороне с целью обеспечения постоянного нахождения фрезерного барабана в положении, позволяющем достичь требуемой глубины фрезерования. Контроллер также использует измеренные значения положения по высоте, полученные от переднего датчика положения по высоте торцевой заслонки на выбранной стороне с целью непрерывного управления линейным исполнительным механизмом в передней подъемной колонне на выбранной стороне для обеспечения постоянного нахождения фрезерного барабана в положении, обеспечивающем достижение требуемой глубины фрезерования. Кроме того, контроллер использует измеренные значения положения по высоте, полученные от заднего датчика положения по высоте торцевой заслонки на выбранной стороне с целью обеспечения непрерывного управления линейным исполнительным механизмом в задней подъемной колонне (или линейными исполнительными механизмами в левой задней и правой задней подъемных колоннах) для обеспечения того, чтобы фрезерный барабан постоянно находился в положении, позволяющем достичь требуемой глубины фрезерования.
Контроллер, используя текущие данные измерения положений по высоте, поступающие от датчиков положения по высоте торцевой заслонки, и известную конфигурацию и местоположение фрезерного барабана по отношению к корпусу, способен автоматически провести необходимые корректировки положения по высоте передней и задней подъемных колонн с учетом любых изменений высоты фрезеруемой поверхности для поддержания требуемой глубины фрезерования в течение всего процесса фрезерования.
Для упрощения понимания настоящего изобретения на чертежах проиллюстрированы предпочтительный пример осуществления настоящего изобретения, а также лучший вариант осуществления настоящего изобретения, известный изобретателям, для реализации настоящего изобретения, при этом ниже приведено их подробное описание. Тем не менее, настоящее изобретение не ограничено конкретным примером осуществления настоящего изобретения, описание которого приведено ниже, или его применением в связи устройством, проиллюстрированном на прилагаемых к данному документу чертежах. Таким образом, объем настоящего изобретения, предполагаемый изобретателями, включает все эквиваленты описанного в данном документе предмета изобретения, а также различные изменения и альтернативные варианты, которые, как правило, должны быть очевидны специалистам в области техники, к которой относится настоящее изобретение. Изобретатели предполагают, что квалифицированные специалисты внесут изменения, которые представляются им подходящими, в том числе в практику осуществления настоящего изобретения противоположно той, которая, в частности, описана в настоящем документе. Кроме того, настоящее изобретение охватывает любое сочетание элементов и компонентов настоящего изобретения, описание которых приведено в настоящем документе в любом возможном варианте, если иное не указано в настоящем документе или явно не исключено в контексте.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Данный предпочтительный пример осуществления настоящего изобретения проиллюстрирован на прилагаемых чертежах, на которых одинаковые детали обозначены одними и теми же позициями и на которых:
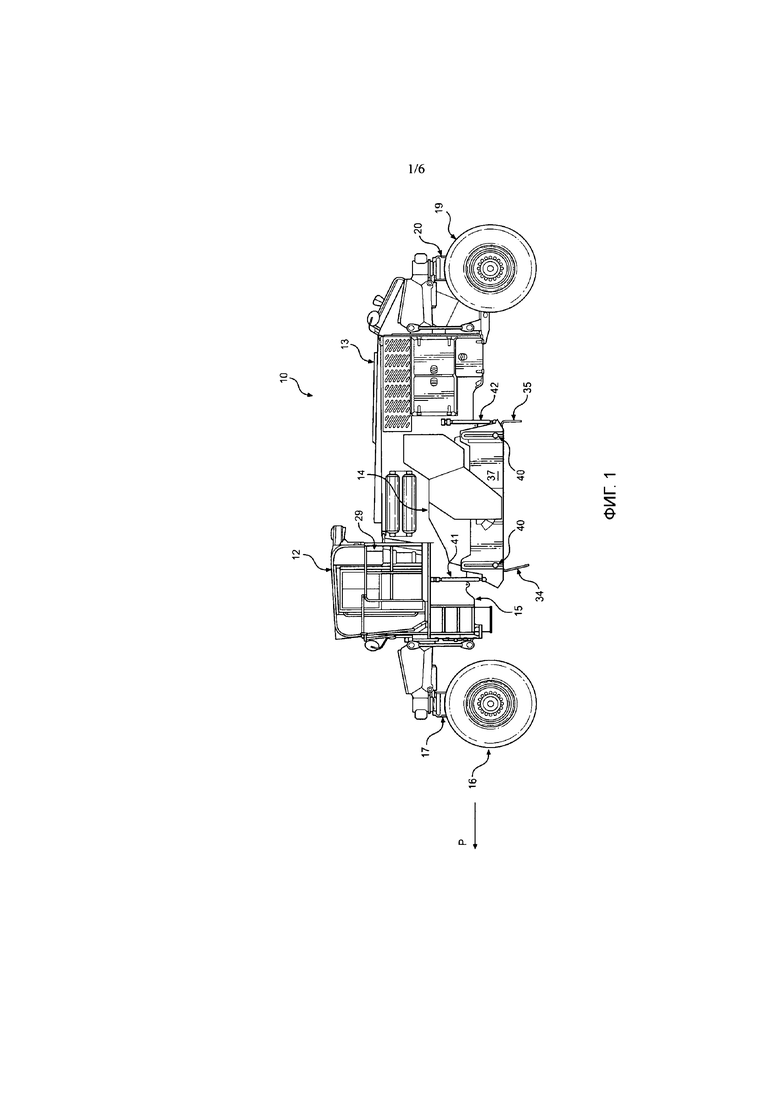
Фиг. 1 – вид сбоку первого варианта осуществления дорожной фрезерной машины, включающей настоящее изобретение.
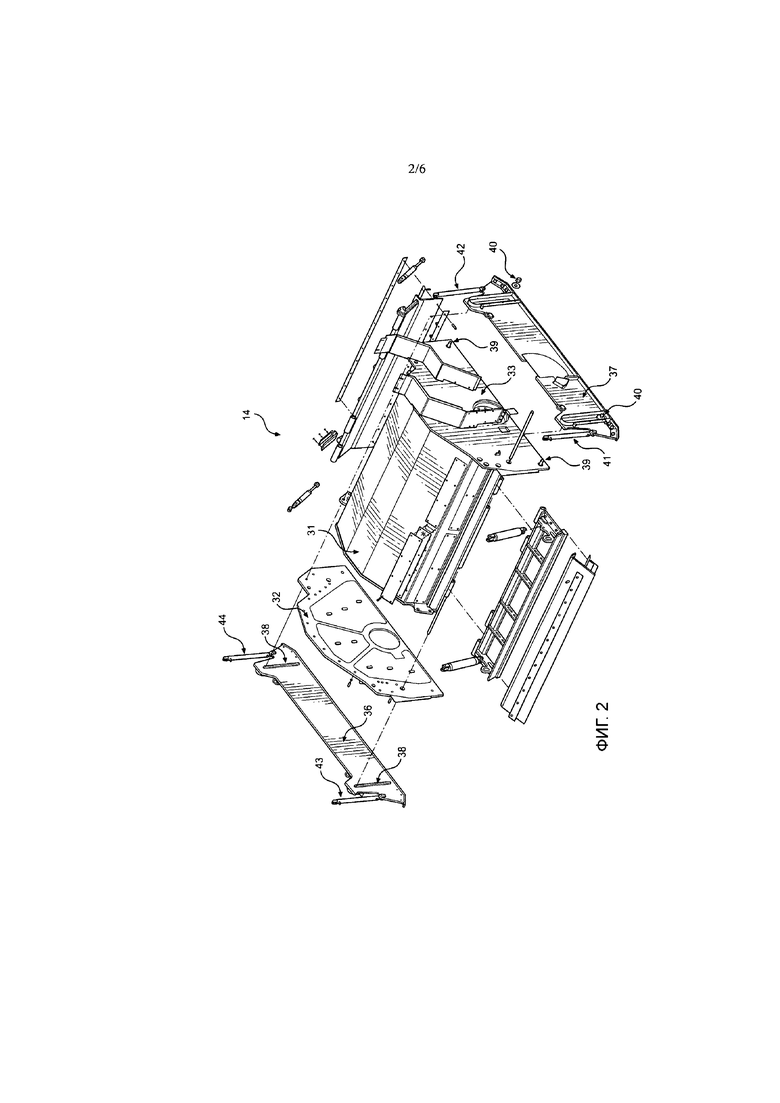
Фиг. 2 – покомпонентное изображение узла корпуса барабана дорожной фрезерной машины, проиллюстрированной на Фиг. 1.
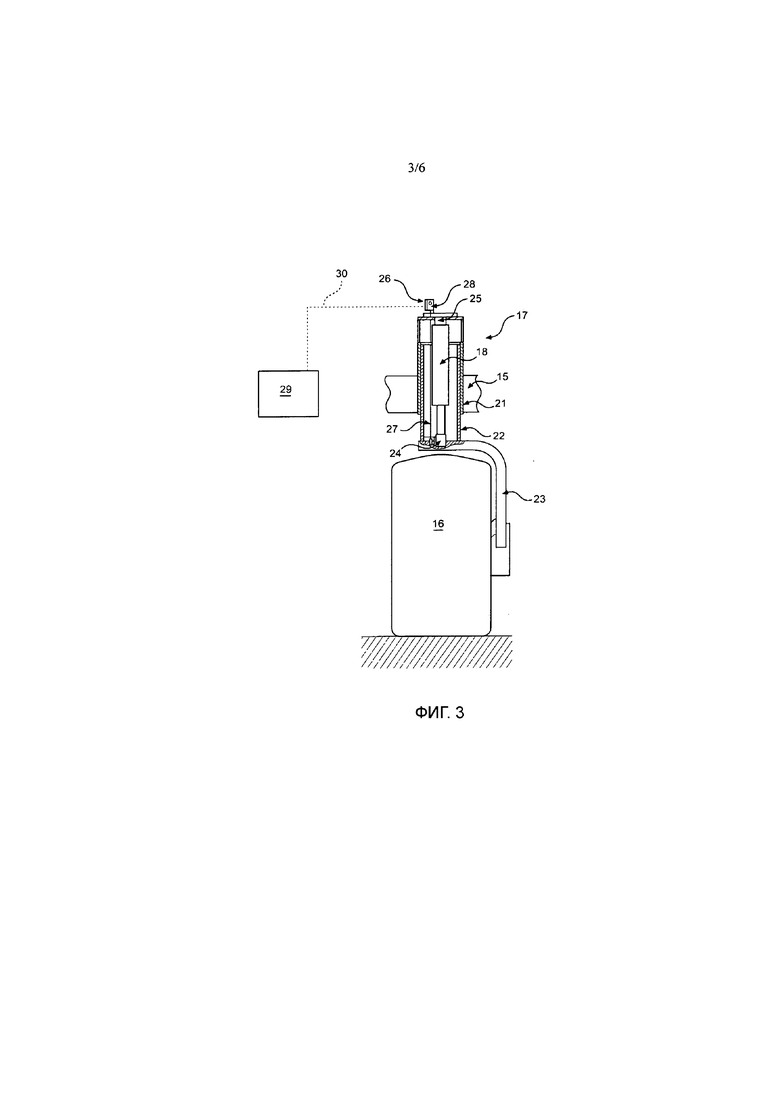
Фиг. 3 – вид спереди, частично в разрезе, подъемной колонны дорожной фрезерной машины, проиллюстрированной на Фиг. 1 и 2.
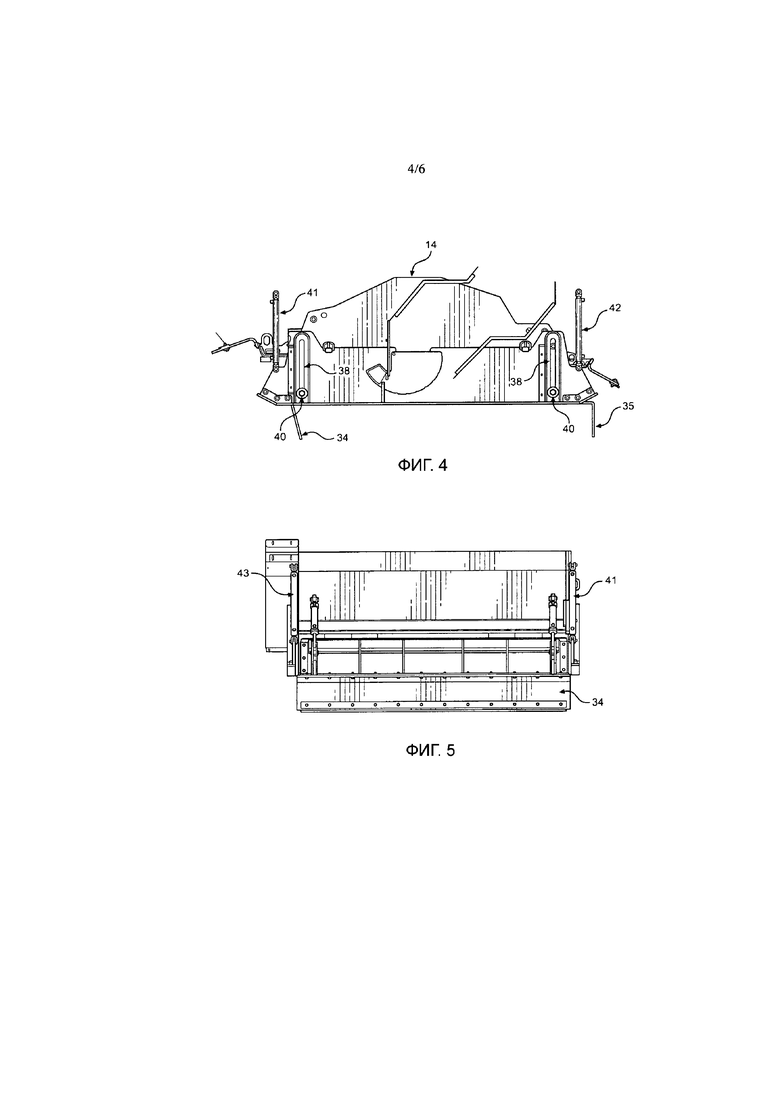
Фиг. 4 – вид сбоку узла корпуса барабана, проиллюстрированного на Фиг. 2.
Фиг. 5 – вид сзади узла корпуса барабана, проиллюстрированного на Фиг. 2 и Фиг. 4.
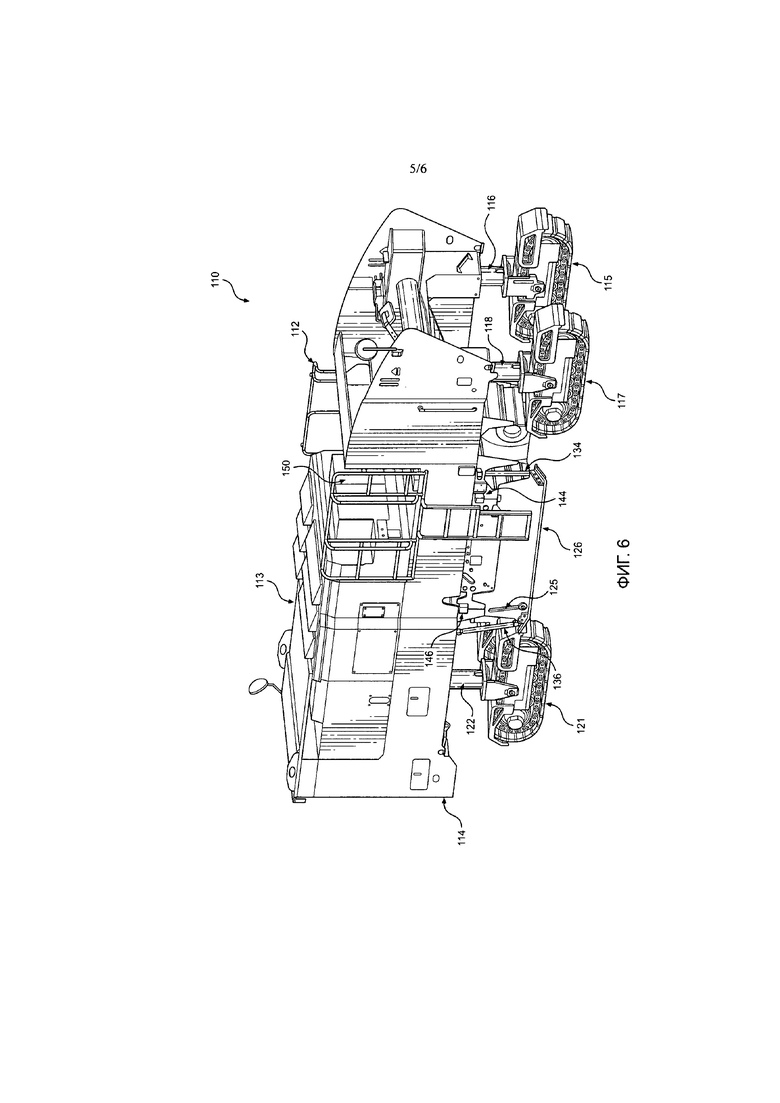
Фиг. 6 – вид в перспективе правой стороны второго варианта осуществления дорожной фрезерной машины, включающей настоящее изобретение.
Фиг. 7 – вид в перспективе левой стороны дорожной фрезерной машины, проиллюстрированной на Фиг. 6.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Прочтение нижеприведенного описания предпочтительного примера осуществления настоящего изобретения должно вестись со ссылками на прилагаемые чертежи, которые являются частью полного описания настоящего изобретения, изложенного в письменной форме. Чертежи не обязательно приведены в масштабе, и определенные элементы настоящего изобретения могут быть увеличены в масштабе или показаны в несколько схематической форме в интересах ясности и краткости.
Как проиллюстрировано на Фиг. 1, дорожная фрезерная машина 10 включает дорожный стабилизатор, снабженный рабочим местом оператора 12, и отсек 13 двигателя, в котором размещен известный источник энергии, такой как дизельный двигатель (не показан). Рабочее место оператора 12 включает все средства управления, необходимые для приведения в действие и управления движением дорожной фрезерной машины в направлении фрезерования «P», для управления работой фрезерного барабана (не показан, но размещенный внутри корпуса 14 барабана), и для управления некоторыми компонентами настоящего изобретения, в соответствии с нижеприведенными пояснениями. Энергия от двигателя на фрезерный барабан передается приводным ремнем или иными средствами, известными специалистам в данной области техники. Фрезерный барабан имеет известную конструкцию и включает несколько режущих зубьев, установленных по окружности фрезерного барабана, при этом режущие зубья предназначены для фрезерования дорожной поверхности по мере вращения фрезерного барабана и перемещения дорожной фрезерной машины по поверхности дороги в направлении фрезерования. Нижняя часть траектории перемещения фрезы совпадает с нижней частью круговой траектории зубьев фрезы, описываемой несколькими режущими зубьями по мере вращения фрезерного барабана. Линейные исполнительные механизмы предназначены для подъема и опускания рамы 15, несущей корпус 14 барабана и фрезерный барабан по отношению к дорожной поверхности, на которой размещена дорожная фрезерная машина для проведения работ. Предпочтительно, чтобы подъемные колонны, к которым присоединены колесные узлы, включали размещенные внутри линейные исполнительные механизмы, выдвигающиеся и втягивающиеся для изменения положения по высоте рамы дорожной фрезерной машины, несущей фрезерный барабан, по отношению к дорожной поверхности, на которой работает дорожная фрезерная машина. Таким образом, левый передний колесный узел 16 присоединен к левой передней подъемной колонне 17, включающей размещенный внутри нее подъемный исполнительный механизм 18 (проиллюстрирован на Фиг. 3). Правый передний колесный узел (не показан, но в основном аналогичный левому переднему колесному узлу 16) расположен напротив левого переднего колесного узла 16 на правой передней подъемной колонне, являющейся в основном аналогичной левой передней подъемной колонне 17. Подобным образом левый задний колесный узел 19 присоединен к левой задней подъемной колонне 20, включающей размещенный внутри нее подъемный исполнительный механизм (не показан, но в основном аналогичный исполнительному механизму 18). Правый задний колесный узел (не показан, но в основном аналогичный левому заднему колесному узлу 19) расположен напротив левого заднего колесного узла 19 на правой задней подъемной колонне, являющейся в основном аналогичной левой задней подъемной колонне 20. Тяговая мощность от двигателя также передается с помощью средств, известных специалистам в данной области техники, к которой относится настоящее изобретение, на колесные узлы, некоторые или все из которых являются управляемыми.
Как показано на Фиг. 3, подъемная колонна 17 включает два пустотелых цилиндра 21 и 22, способных совершать телескопическое перемещение по отношению друг к другу. Таким образом, подъемная колонна 17 предназначена для направления перемещения рамы 15 дорожной фрезерной машины и фрезерного барабана по отношению к поверхности дорожного полотна и для управления частью регулировки по высоте указанных компонентов. Верхний внешний цилиндр 21 присоединен к раме 15, и нижний внутренний цилиндр 22 присоединен к опоре 23 колеса 16. Внутри подъемной колонны 17 размещен линейный исполнительный механизм, включающий внутренний подъемный исполнительный механизм 18, который может быть приведен в действие для корректировки положения по высоте рамы 15 дорожной фрезерной машины и фрезерного барабана по отношению к поверхности дорожного полотна. В варианте осуществления настоящего изобретения, проиллюстрированном на Фиг. 3, конец штока 24 линейного исполнительного механизма 18 присоединен к опоре 23, и конец цилиндра 25 присоединен к верхнему внешнему цилиндру 21, присоединенному к раме 15.
Подъемная колонна 17 включает датчик положения по высоте 26 или соединена с указанным датчиком для измерения текущего положения подъема подъемной колонны 17. В варианте осуществления настоящего изобретения, проиллюстрированном на Фиг. 3, датчик положения по высоте 26 включает тросовый датчик, включающий тросик 27 и головку 28 датчика. Нижний конец тросика 27 присоединен к нижней части нижнего внутреннего цилиндра 22 или к опоре 23 колеса 16, и верхний конец тросика присоединен к головке 28 датчика, которая присоединена к верхнему концу верхнего внешнего цилиндра 21. Измеренный сигнал тракта передачи тросового датчика передается головкой 28 датчика на контроллер 29 линии 30 передачи сигнала.
Как показано на Фиг. 2, 4 и 5, корпус 14 барабана включает верхнюю ограждающую конструкцию 31 и пару боковых ограждающих конструкций, правую боковую ограждающую конструкцию 32 и левую боковую ограждающую конструкцию 33. Указанные ограждающие конструкции в целом ограждают фрезерный барабан и предотвращают неконтролируемый выброс из него фрезерованного материала. Корпус 14 барабана также снабжен передним гибким удлинением 34 и задним гибким удлинением 35, контактирующими с дорожной поверхностью и образующими защитное уплотнение, препятствующее пылевыделению при плотном прилегании к дорожной поверхности. К внешней стороне правой боковой ограждающей конструкции 32 присоединена правая торцевая заслонка 36, и к внешней стороне левой боковой ограждающей конструкции 33 присоединена левая торцевая заслонка 37. Каждая из торцевых заслонок снабжена парой направляющих пазов 38, в которые входят направляющие болты 39 на стороне ограждающих конструкций с целью создания средства контроля вертикальной корректировки положения по высоте торцевых заслонок. Гайки 40 присоединены к концам болтов 39 с целью ограничения перемещения торцевых заслонок в основном в вертикальном направлении. К концам каждой из торцевых заслонок также присоединен линейный исполнительный механизм. Каждый линейный исполнительный механизм соединен с датчиком положения или включает датчик положения, предпочтительно включающий внутренний преобразователь линейных перемещений или внешний преобразователь линейных перемещений, обеспечивающий измерение выдвижение штока исполнительного механизма для определения вертикального положения переднего или заднего конца каждой торцевой заслонки. Таким образом, левый передний исполнительный механизм/датчик 41 присоединен между рамой 15 дорожной фрезерной машины 10 и передним концом левой торцевой заслонки 37. Левый задний исполнительный механизм/датчик 42 присоединен между рамой дорожной фрезерной машины и задним концом левой торцевой заслонки 37. Подобным образом, правый передний исполнительный механизм/датчик 43 присоединен между рамой дорожной фрезерной машины и передним концом правой торцевой заслонки 36, и правый задний исполнительный механизм/датчик 44 присоединен между рамой дорожной фрезерной машины и задним концом правой торцевой заслонки 36. В других вариантах осуществления настоящего изобретения (не показаны) линейные исполнительные механизмы и датчики положения, присоединенные к переднему и заднему концу каждой торцевой заслонки, могут представлять собой отдельные блоки, функционально соединенные с контроллером 29.
Все исполнительные механизмы/датчики 41, 42, 43 и 44 и линейные исполнительные механизмы в левой передней подъемной колонне 17, правой передней подъемной колонне, левой задней подъемной колонне 20 и правой задней подъемной колонне функционально соединены с контроллером 29, размещенным на рабочем месте оператора 12. Каждый из линейных исполнительных механизмов гидравлически соединен с гидравлической системой, включающей гидравлический насос, функционально соединенный с контроллером 29. Кроме того, датчик положения по высоте 26 в левой передней подъемной колонне 17 и аналогичные датчики положения по высоте в правой передней подъемной колонне, левой задней подъемной колонне 20 и правой задней подъемной колонне также функционально соединены с контроллером 29. Каждый датчик положения по высоте, предназначен для передачи на контроллер сигнала, указывающего на относительную высоту подъемной колонны или части торцевой заслонки, с которой она соединена, и контроллер предназначен для использования данной информации для управления выдвижением линейных исполнительных механизмов в подъемных колоннах.
В контроллере 29 могут быть размещены один или несколько микропроцессоров, включающих компоненты для управления работой дорожной фрезерной машины 10 на основе команд, вводимых оператором дорожной фрезерной машины и на основе регистрируемых или иных известных рабочих параметров. В контроллере 29 предпочтительно запрограммированы вводимые данные о различных относительных положениях, конфигурациях и размерах торцевых заслонок, фрезерного барабана и подъемных колонн таким образом, чтобы контроллер обеспечивал определение конкретных корректировок положений по высоте подъемных колонн, необходимых для поддержания требуемой глубины фрезерования. Контроллер 29 включает блок памяти или соединен с указанным блоком, кроме того, контроллер предпочтительно включает компоненты для ввода данных, такие как сенсорный экран и (или) несколько кнопок управления для осуществления ввода команд оператором дорожной фрезерной машины. Контроллер 29 может также включать компоненты для вывода данных, такие как сенсорный дисплей, периферийное запоминающее устройство, процессор и иные компоненты для запуска и выполнения приложений. Различные контуры могут быть связаны и функционально соединены с контроллером, такие как элементы силового блока системы питания и элементы гидросистемы. Многочисленные имеющиеся в продаже на рынке микропроцессоры могут быть сконфигурированы для выполнения функций контроллера 29. Следует понимать, что контроллер можно было бы несложно преобразовать в компьютер общего назначения или микропроцессорное устройство управления дорожной фрезерной машиной, способное осуществлять управление многочисленными функциями дорожной фрезерной машины.
Как описано выше, контроллер 29 функционально соединен с левым передним исполнительным механизмом/датчиком 41, левым задним исполнительным механизмом/датчиком 42, правым передним исполнительным механизмом/датчиком 43 и правым задним исполнительным механизмом/датчиком 44. Контроллер 29 предназначен для приема сигналов, указывающих на положение по высоте левой торцевой заслонки по отношению к дорожной поверхности, с левого переднего исполнительного механизма/датчика 41 и левого заднего исполнительного механизма/датчика 42, и контроллер 29 также предназначен для приема сигналов, указывающих на положение по высоте правой торцевой заслонки по отношению к дорожной поверхности, с правого переднего исполнительного механизма/датчика 43 и правого заднего исполнительного механизма/датчика 44.
Контроллер 29 также функционально соединен с левым передним линейным исполнительным механизмом 18 левой передней подъемной колонны 17 и с левым передним датчиком положения по высоте 26, соединенным с левой передней подъемной колонной 17.
Контроллер 29 предназначен для приема сигнала, указывающего на положение по высоте рамы по отношению к дорожной поверхности, от датчика положения по высоте 26 и предназначен для регулирования перемещения левого переднего линейного исполнительного механизма 18 в левой передней подъемной колонне 17 по отношению к дорожной поверхности.
Подобным образом контроллер 29 функционально соединен с правым передним линейным исполнительным механизмом правой передней подъемной колонны и с правым передним датчиком положения по высоте, соединенным с правой передней подъемной колонной. Контроллер 29 предназначен для приема сигнала, указывающего на положение по высоте рамы по отношению к дорожной поверхности, с правого переднего датчика положения по высоте и предназначен для регулирования перемещения правого переднего линейного исполнительного механизма в правой передней подъемной колонне по отношению к дорожной поверхности. Контроллер 29 также функционально соединен с левым задним линейным исполнительным механизмом левой задней подъемной колонны 20 и с левым задним датчиком положения по высоте, соединенным с левой задней подъемной колонной 20. Контроллер 29 предназначен для приема сигнала, указывающего на положение по высоте рамы по отношению к дорожной поверхности, с левого заднего датчика положения по высоте, и предназначен для регулирования перемещения левого заднего линейного исполнительного механизма в левой задней подъемной колонне 20 по отношению к дорожной поверхности. Подобным образом контроллер 29 функционально соединен с правым задним линейным исполнительным механизмом правой задней подъемной колонны и с правым задним датчиком положения по высоте, соединенным с правой задней подъемной колонной. Контроллер 29 предназначен для приема сигнала, указывающего на положение по высоте рамы по отношению к дорожной поверхности, с правого заднего датчика положения по высоте и предназначен для регулирования перемещения правого заднего линейного исполнительного механизма в правой задней подъемной колонне по отношению к дорожной поверхности.
Левый передний исполнительный механизм/датчик 41 передает сигнал на контроллер 29, указывающий на положение по высоте переднего конца левой торцевой заслонки по отношению к дорожной поверхности, и контроллер 29 предназначен для регулирования положения по высоте левой передней подъемной колонны 17, по меньшей мере, частично, реагируя на такой сигнал. Подобным образом, правый передний исполнительный механизм/датчик 43 передает сигнал на контроллер 29, указывающий на положение по высоте переднего конца правой торцевой заслонки по отношению к дорожной поверхности, и контроллер 29 предназначен для регулирования положения по высоте правой передней подъемной колонны, по меньшей мере, частично реагируя на такой сигнал. Исполнительные механизмы/датчики, расположенные на задних концах торцевых заслонок, предназначены для передачи сигналов на контроллер 29, позволяющих контроллеру регулировать положения по высоте одной левой передней подъемной колонны и одной правой передней подъемной колонны в соответствии с настоящим изобретением, а также левой задней подъемной колонны 20 и правой задней подъемной колонны (ввиду того, что размещенные внутри линейные исполнительные механизмы в двух подъемных колоннах связаны с одной и той же гидравлической системой, обеспечивающей их совместную работу).
Прежде чем приступить к выполнению процесса автоматического управления, описанного в данном документе, оператор выбирает требуемую глубину фрезерования и передает данные о выборе глубины на контроллер 29. Далее контроллер приводит в действие линейные исполнительные механизмы в подъемных колоннах для расположения фрезерного барабана по отношению к поверхности дорожного полотна таким образом, чтобы обеспечить врезание на требуемую глубину фрезерования, тем самым обеспечивая установку правой торцевой заслонки 36 и левой торцевой заслонки 37 на поверхности дорожного полотна. Оператор также выбирает правый задний датчик положения по высоте 44 или левый задний датчик положения по высоте 42, предпочтительно в зависимости от того, какая торцевая заслонка (правая или левая) находится на более устойчивой поверхности. Оператор передает указанные установки и выбранные варианты на контроллер 29. Далее контроллер осуществляет управление линейным исполнительным механизмом в передней подъемной колонне на стороне, не выбранной оператором, путем усреднения измеренных значений высоты как передних, так и задних датчиков положения по высоте торцевых заслонок на невыбранной стороне и путем использования данной информации для управления линейным исполнительным механизмом в передней подъемной колонне на невыбранной стороне для обеспечения того, чтобы фрезерный барабан постоянно находился в положении, обеспечивающим достижение требуемой глубины фрезерования. Контроллер также независимо управляет линейным исполнительным механизмом в передней подъемной колонне на выбранной стороне, используя измерения с переднего датчика положения по высоте торцевой заслонки на выбранной стороне для обеспечения того, чтобы фрезерный барабан постоянно находился в положении для достижения требуемой глубины фрезерования. Кроме того, контроллер использует измеренные значения положения по высоте, полученные от заднего датчика положения по высоте торцевой заслонки на выбранной стороне, либо от правого заднего датчика положения по высоте 44, либо от левого заднего датчика положения по высоте 42, с целью обеспечения непрерывного управления линейными исполнительными механизмами в левой задней и правой задней подъемных колоннах для обеспечения того, чтобы фрезерный барабан постоянно находился в положении, позволяющем достичь требуемую глубину фрезерования.
Второй вариант осуществления настоящего изобретения проиллюстрирован на Фиг. 5 и 6. Как показано на чертежах, дорожная фрезерная машина 110 является дорожной фрезерной машиной с гусеничным приводом, включающей рабочее место оператора 112 и моторный отсек 113, в котором размещен источник энергоснабжения, такой как дизельный двигатель. Рабочее место оператора 112 включает все средства управления, необходимые для приведения в действие и управления движением дорожной фрезерной машины, для управления работой фрезерного барабана (не показан) и для управления некоторыми компонентами настоящего изобретения. Энергия от двигателя на фрезерный барабан передается приводным ремнем или иными средствами, известными специалистам в данной области техники. Фрезерный барабан включает несколько режущих зубьев, установленных по окружности фрезерного барабана, при этом режущие зубья предназначены для фрезерования дорожной поверхности по мере вращения фрезерного барабана и перемещения дорожной фрезерной машины по поверхности дороги. Линейные исполнительные механизмы предназначены для подъема и опускания рамы 114, несущей корпус барабана и фрезерный барабан по отношению к дорожной поверхности, на которой размещена дорожная фрезерная машина для проведения работ. Предпочтительно, чтобы каждая из подъемных колонн, к которым присоединены узлы гусеничного движителя, включала размещенные внутри линейные исполнительные механизмы, такие как подъемный исполнительный механизм 18. Указанные исполнительные механизмы предназначены для выдвижения и втягивания для изменения положения по высоте рамы дорожной фрезерной машины, несущей фрезерный барабан, по отношению к дорожной поверхности, на которой работает дорожная фрезерная машина. Таким образом, левый передний узел 115 гусеничного движителя присоединен к левой передней подъемной колонне 116, включающей размещенный внутри нее линейный исполнительный механизм (не показан, но в основном аналогичный линейному исполнительному механизму 18 дорожной фрезерной машины 10). Правый передний узел 117 гусеничного движителя присоединен к правой передней подъемной колонне 118, которая также включает размещенный внутри нее линейный исполнительный механизм (не показан). Подобным образом, левый задний узел 119 гусеничного движителя присоединен к левой задней подъемной колонне 120, включающей размещенный внутри нее линейный исполнительный механизм (не показан), и правый задний узел 121 гусеничного движителя присоединен к правой задней подъемной колонне 122, которая также включает размещенный внутри нее линейный исполнительный механизм (не показан). Тяговая мощность от двигателя также передается с помощью средств, известных специалистам в данной области техники, к которой относится настоящее изобретение, на узлы гусеничного движителя, некоторые или все из которых являются управляемыми.
Левая торцевая заслонка 124 присоединена к внешней стороне левой боковой ограждающей конструкции корпуса барабана, и правая торцевая заслонка 126 присоединена к внешней стороне правой боковой ограждающей конструкции корпуса барабана. Левая торцевая заслонка 124 в основном аналогична левой торцевой заслонке 37 дорожной фрезерной машины 10, и правая торцевая заслонка 126 в основном аналогична правой торцевой заслонке 36 дорожной фрезерной машины 10. В торцевых заслонках выполнены направляющие пазы 125, которые в основном аналогичны направляющим пазам 38 дорожной фрезерной машины 10, обеспечивающим средство контроля вертикального положения по высоте торцевых заслонок.
Кроме того, к каждый из торцевых заслонок присоединена пара исполнительных механизмов, предназначенных для подъема и опускания торцевых заслонок по отношению к корпусу барабана. Таким образом, левый передний исполнительный механизм 130 присоединен между рамой дорожной фрезерной машины 110 и передним концом левой торцевой заслонки 124, и левый задний исполнительный механизм 132 присоединен между рамой дорожной фрезерной машины и задним концом левой торцевой заслонки 124. Подобным образом, правый передний исполнительный механизм 134 присоединен между рамой дорожной фрезерной машины 110 и передним концом правой торцевой заслонки 126, и правый задний исполнительный механизм 136 присоединен между рамой дорожной фрезерной машины и задним концом правой торцевой заслонки 126.
Кроме того, пара грунтозацепных датчиков присоединена к каждой торцевой заслонке. В варианте осуществления настоящего изобретения, проиллюстрированном на Фиг. 6 и 7, указанные датчики являются тросовыми датчиками, которые выдвигаются для указания расстояния до поверхности земли, когда торцевая заслонка, с которой они соединены, контактирует с землей, при этом могут быть использованы любые известные датчики, способные определять высоту подъема торцевых заслонок, с которыми они соединены, относительно поверхности земли. Как проиллюстрировано на чертежах, левый передний грунтозацепный датчик 140 присоединен между рамой дорожной фрезерной машины 110 и передним концом левой торцевой заслонки 124, и левый задний грунтозацепный датчик 142 присоединен между рамой дорожной фрезерной машины и задним концом левой торцевой заслонки 124.
Подобным образом, правый передний грунтозацепный датчик 144 присоединен между рамой дорожной фрезерной машины 110 и передним концом правой торцевой заслонки 126, и правый задний грунтозацепный датчик 146 присоединен между рамой дорожной фрезерной машины и задним концом правой торцевой заслонки 126.
Датчики 140, 142, 144 и 146 и линейные исполнительные механизмы в левой передней подъемной колонне 116, правой передней подъемной колонне 118, левой задней подъемной колонне 120 и правой задней подъемной колонне 122 функционально соединены с контроллером 150. Датчики положения по высоте (не показаны, но в основном аналогичны датчику положения по высоте 26 дорожной фрезерной машины 10), соединенные с левой передней подъемной колонной 116, правой передней подъемной колонной 118, левой задней подъемной колонной 120 и правой задней подъемной колонной 122, также функционально соединены с контроллером 150, расположенным на рабочем месте оператора 112. Контроллер 150 в основном аналогичен контроллеру 29 дорожной фрезерной машины 10.
Оператор выбирает требуемую глубину фрезерования и передает данные о выбранном варианте на контроллер 150. Контроллер приводит в действие линейные исполнительные механизмы в подъемных колоннах для расположения фрезерного барабана по отношению к поверхности дорожного полотна с целью достижения требуемой глубины фрезерования. Благодаря этому обеспечивается установка левой торцевой заслонки 124 и правой торцевой заслонки 126 на поверхности дорожного полотна. Левый передний датчик 140 обеспечивает обратную связь для управления положением левой передней подъемной колонны 116 по отношению к раме 114, и правый передний датчик 144 обеспечивает обратную связь для управления положением правой передней подъемной колонны 118 по отношению к раме. Левый задний датчик 142 и правый задний датчик 146 обеспечивают обратную связь для регулирования положения по высоте либо левой передней подъемной колонны, либо правой передней подъемной колонны, а также положения по высоте левой задней подъемной колонны 120 и правой задней подъемной колонны 122 по отношению к раме (ввиду того, что линейные исполнительные механизмы в двух подъемных колоннах включены в одну и ту же гидравлическую систему, и их работа взаимосвязана). Оператор выбирает левый задний датчик 142 или правый задний датчик 146, предпочтительно в зависимости от того, какая торцевая заслонка (левая или правая) является более устойчивой на поверхности.
Контроллер 150 предназначен для определения фактической глубины фрезерования слева спереди на левой стороне дорожной фрезерной машины с помощью сигнала с переднего конца левой торцевой заслонки, фактической глубины фрезерования слева сзади на левой стороне дорожной фрезерной машины с помощью сигнала с заднего конца левой торцевой заслонки, фактической глубины фрезерования справа спереди на правой стороне дорожной фрезерной машины с помощью сигнала с переднего конца правой торцевой заслонки и фактической глубины фрезерования справа сзади на правой стороне дорожной фрезерной машины с помощью сигнала с заднего конца правой торцевой заслонки. Контроллер 150 также предназначен для управления линейным исполнительным механизмом в передней подъемной колонне на стороне, не выбранной оператором, путем усреднения фактической передней глубины фрезерования и фактической задней глубины фрезерования на невыбранной стороне дорожной фрезерной машины и путем использования указанной усредненной величины для корректировки положения по высоте передней подъемной колонны на невыбранной стороне для поддержания требуемой глубины фрезерования. Таким образом, контроллер 150, используя выбранный оператором вариант - левый задний датчик 142 или правый задний датчик 146 - управляет линейным исполнительным механизмом в передней подъемной колонне на стороне, не выбранной оператором с помощью сигналов, принятых с переднего и заднего датчиков торцевых заслонок на невыбранной стороне для определения измеренных глубин фрезерования спереди и сзади торцевых заслонок на невыбранной стороне. Контроллер 150 далее усредняет указанные измеренные значения глубины фрезерования на невыбранной стороне и использует данную информацию для управления линейным исполнительным механизмом в передней подъемной колонне на невыбранной стороне для позиционирования фрезерного барабана для поддержания требуемой глубины фрезерования.
Контроллер 150 также независимо управляет передней подъемной колонной на выбранной стороне путем позиционирования передней подъемной колонны по отношению к раме таким образом, чтобы значения измерений с переднего датчика торцевой заслонки на выбранной стороне соответствовали положению по высоте подъемной колонны, необходимому для поддержания требуемой глубины фрезерования. Кроме того, контроллер 150 использует измеренные значения положения по высоте, полученные с заднего датчика положения по высоте торцевой заслонки на выбранной стороне, либо правого заднего датчика положения по высоте 146, либо левого заднего датчика положения по высоте 142, с целью непрерывного управления линейными исполнительными механизмами в левой задней и правой задней подъемных колоннах для обеспечения постоянного положения фрезерного барабана для достижения требуемой глубины фрезерования.
Несмотря на то, что в настоящем описании содержатся многочисленные отличительные признаки, указанные признаки не следует истолковывать как ограничивающие объем настоящего изобретения, а как лишь иллюстрирующие предпочтительные примеры осуществления настоящего изобретения, а также лучший вариант осуществления настоящего изобретения, предполагаемый изобретателями, для реализации настоящего изобретения. Настоящее изобретение в соответствии с приведенным в данном документе описанием допускает различные изменения и дополнения, которые очевидны специалистам в данной области техники, к которой относится настоящее изобретение.

Дорожная фрезерная машина включает фрезерный узел, снабженный корпусом, к которому присоединены левая и правая торцевые заслонки, контроллер, правую переднюю подъемную колонну, левую переднюю подъемную колонну и заднюю подъемную колонну. Датчики положения по высоте размещены спереди и сзади каждой из торцевых заслонок. Контроллер функционально соединен с датчиками положения по высоте и с линейными исполнительными механизмами внутри подъемных колонн дорожной фрезерной машины. Датчик положения по высоте, расположенный на переднем конце правой торцевой заслонки, обеспечивает обратную связь для управления положением правой передней подъемной колонны, и датчик положения по высоте, расположенный на переднем конце левой торцевой заслонки, обеспечивает обратную связь для управления положением левой передней подъемной колонны. По выбору оператора датчики положения по высоте, расположенные на задних концах торцевых заслонок, предназначены для обеспечения обратной связи для управления положением правой и левой передних подъемных колонн, а также задней подъемной колонны. 2 н. и 4 з.п. ф-лы, 7 ил.
1. Дорожная фрезерная машина для фрезерования дорожной поверхности, управляемая оператором, при этом дорожная фрезерная машина включает:
(a) раму;
(b) фрезерный узел, включающий корпус барабана, присоединенный к раме, при этом фрезерный узел включает:
(i) правую торцевую заслонку, присоединенную к правой стороне корпуса и предназначенную для перемещения в вертикальном направлении по отношению к корпусу;
(ii) правый передний датчик положения по высоте, присоединенный к правой торцевой заслонке и предназначенный для определения положения по высоте переднего конца правой торцевой заслонки по отношению к дорожной поверхности;
(iii) правый задний датчик положения по высоте, присоединенный к правой торцевой заслонке и предназначенный для определения положения по высоте заднего конца правой торцевой заслонки по отношению к дорожной поверхности;
(iv) левую торцевую заслонку, присоединенную к левой стороне корпуса и предназначенную для перемещения в вертикальном направлении по отношению к корпусу;
(v) левый передний датчик положения по высоте, присоединенный к левой торцевой заслонке и предназначенный для определения положения по высоте переднего конца левой торцевой заслонки по отношению к дорожной поверхности;
(vi) левый задний датчик положения по высоте, присоединенный к левой торцевой заслонке и предназначенный для определения положения по высоте заднего конца левой торцевой заслонки по отношению к дорожной поверхности;
(c) правую переднюю подъемную колонну, верхний конец которой присоединен к раме и нижний конец которой присоединен к правому переднему узлу привода, при этом правая передняя подъемная колонна включает правый передний линейный исполнительный механизм, который может быть приведен в действие для подъема и опускания рамы дорожной фрезерной машины по отношению к дорожной поверхности;
левую переднюю подъемную колонну, верхний конец которой присоединен к раме и ее нижний конец присоединен к левому переднему узлу привода, при этом левая передняя подъемная колонна включает левый передний линейный исполнительный механизм, который может быть приведен в действие для подъема и опускания рамы по отношению к дорожной поверхности;
заднюю подъемную колонну, верхний конец которой присоединен к раме и ее нижний конец присоединен к заднему узлу привода, при этом задняя подъемная колонна включает задний линейный исполнительный механизм, который может быть приведен в действие для подъема и опускания рамы дорожной фрезерной машины по отношению к дорожной поверхности;
контроллер, который:
(i) функционально соединен с правым передним датчиком положения по высоте и предназначен для приема сигнала с правого переднего конца торцевой заслонки, указывающего на положение по высоте переднего конца правой торцевой заслонки по отношению к дорожной поверхности;
(ii) функционально соединен с правым задним датчиком положения по высоте и предназначен для приема сигнала с правого заднего конца торцевой заслонки, указывающего на положение по высоте заднего конца правой торцевой заслонки по отношению к дорожной поверхности;
(iii) функционально соединен с левым передним датчиком положения по высоте и предназначен для приема сигнала с левого переднего конца торцевой заслонки, указывающего на положение по высоте переднего конца левой торцевой заслонки по отношению к дорожной поверхности;
(iv) функционально соединен с левым задним датчиком положения по высоте и предназначен для приема сигнала с левого заднего конца торцевой заслонки, указывающего на положение по высоте заднего конца левой торцевой заслонки по отношению к дорожной поверхности;
(v) функционально соединен с правым передним линейным исполнительным механизмом правой передней подъемной колонны и предназначен для регулирования положения по высоте правой передней подъемной колонны по отношению к дорожной поверхности;
(vi) функционально соединен с левым передним линейным исполнительным механизмом левой передней подъемной колонны и предназначен для регулирования положения по высоте левой передней подъемной колонны по отношению к дорожной поверхности;
(vii) предназначен для приема сигнала, определяющего выбор стороны, от оператора, выбирающего либо левую сторону, либо правую сторону дорожной фрезерной машины;
(viii) предназначен для приема сигнала, определяющего глубину фрезерования, от оператора, выбирающего требуемую глубину фрезерования;
(ix) предназначен для определения фактической правой передней глубины фрезерования на правой стороне дорожной фрезерной машины с помощью сигнала с правого переднего конца торцевой заслонки;
(x) предназначен для определения фактической правой задней глубины фрезерования на правой стороне дорожной фрезерной машины с помощью сигнала с правого заднего конца торцевой заслонки;
(xi) предназначен для определения фактической левой передней глубины фрезерования на левой стороне дорожной фрезерной машины с помощью сигнала с левого переднего конца торцевой заслонки;
(xii) предназначен для определения фактической левой задней глубины фрезерования на левой стороне дорожной фрезерной машины с помощью сигнала с левого заднего конца торцевой заслонки;
(xiii) предназначен для управления линейным исполнительным механизмом в передней подъемной колонне на стороне, не выбранной оператором, путем усреднения фактической передней глубины фрезерования и фактической задней глубины фрезерования на невыбранной стороне дорожной фрезерной машины и путем использования указанной усредненной величины для корректировки положения по высоте передней подъемной колонны на невыбранной стороне для поддержания требуемой глубины фрезерования;
(xiv) предназначен для управления линейным исполнительным механизмом в передней подъемной колонне на выбранной стороне путем использования фактической передней глубины фрезерования выбранной стороны дорожной фрезерной машины для корректировки положения по высоте передней подъемной колонны на выбранной стороне для поддержания требуемой глубины фрезерования.
2. Дорожная фрезерная машина по п. 1,
(a) включающая:
(i) правый передний датчик положения по высоте, соединенный с правой передней подъемной колонной и предназначенный для определения правого переднего положения по высоте рамы по отношению к дорожной поверхности;
(ii) левый передний датчик положения по высоте, соединенный с левой передней подъемной колонной и предназначенный для определения левого переднего положения по высоте рамы по отношению к дорожной поверхности;
(b) при этом контроллер:
(i) функционально соединен с правым передним датчиком положения по высоте правой передней подъемной колонны и предназначен для приема сигнала правой передней подъемной колонны, указывающего на правое переднее положение по высоте рамы по отношению к дорожной поверхности;
(ii) функционально соединен с левым передним датчиком положения по высоте левой передней подъемной колонны и предназначен для приема сигнала левой передней подъемной колонны, указывающего на левое переднее положение по высоте рамы по отношению к дорожной поверхности.
3. Дорожная фрезерная машина по п. 1, в которой:
(a) корпус включает:
(i) левую боковую ограждающую конструкцию, имеющую внешнюю сторону, к которой присоединена пара левых боковых направляющих болтов;
(ii) правую боковую ограждающую конструкцию, имеющую внешнюю сторону, к которой присоединена пара правых боковых направляющих болтов;
(b) левая торцевая заслонка включает пару левых боковых направляющих пазов, входящих в зацепление с левыми боковыми направляющими болтами, с целью обеспечения средств контроля в отношении вертикального регулирования положения по высоте левой торцевой заслонки;
(c) гайка соединена с торцами каждого из левых боковых направляющих болтов для ограничения перемещения левой торцевой заслонки, в основном перемещения в вертикальном направлении;
(d) правая торцевая заслонка включает пару правых боковых направляющих пазов, входящих в зацепление с правыми боковыми направляющими болтами, с целью обеспечения средств контроля в отношении вертикального регулирования положения по высоте правой торцевой заслонки;
(e) гайка соединена с торцами каждого из правых боковых направляющих болтов для ограничения перемещения правой торцевой заслонки, в основном перемещения в вертикальном направлении.
4. Дорожная фрезерная машина по п. 1, в которой контроллер:
(a) функционально соединен с задним линейным исполнительным механизмом задней подъемной колонны и предназначен для регулирования положения по высоте задней подъемной колонны по отношению к дорожной поверхности;
(b) предназначен для определения фактической левой задней глубины фрезерования на левой стороне дорожной фрезерной машины с помощью сигнала с левого заднего конца торцевой заслонки;
(c) предназначен для определения фактической правой задней глубины фрезерования на правой стороне дорожной фрезерной машины с помощью сигнала с правого заднего конца торцевой заслонки;
(d) предназначен для управления линейным исполнительным механизмом в задней подъемной колонне путем использования фактической задней глубины фрезерования выбранной стороны дорожной фрезерной машины для корректировки положения по высоте задней подъемной колонны для поддержания требуемой глубины фрезерования.
5. Дорожная фрезерная машина по п. 4:
(a) включающая задний датчик положения по высоте, соединенный с задней подъемной колонной и предназначенный для определения заднего положения по высоте рамы по отношению к дорожной поверхности;
(b) в которой контроллер функционально соединен с задним датчиком положения по высоте задней подъемной колонны и предназначен для приема сигнала задней подъемной колонны, указывающего на положение по высоте рамы по отношению к дорожной поверхности.
6. Способ управления дорожной фрезерной машиной, включающей:
(a) раму;
(b) фрезерный узел, включающий корпус барабана, присоединенный к раме, при этом корпус включает:
(i) правую торцевую заслонку, присоединенную к правой стороне корпуса и предназначенную для перемещения в вертикальном направлении по отношению к корпусу;
(ii) правый передний датчик положения по высоте, присоединенный к правой торцевой заслонке и предназначенный для определения положения по высоте переднего конца правой торцевой заслонки по отношению к дорожной поверхности;
(iii) правый задний датчик положения по высоте, присоединенный к правой торцевой заслонке и предназначенный для определения положения по высоте заднего конца правой торцевой заслонки по отношению к дорожной поверхности;
(iv) левую торцевую заслонку, присоединенную к левой стороне корпуса и предназначенную для перемещения в вертикальном направлении по отношению к корпусу;
(v) левый передний датчик положения по высоте, присоединенный к левой торцевой заслонке и предназначенный для определения положения по высоте переднего конца левой торцевой заслонки по отношению к дорожной поверхности;
(vi) левый задний датчик положения по высоте, присоединенный к левой торцевой заслонке и предназначенный для определения положения по высоте заднего конца левой торцевой заслонки по отношению к дорожной поверхности;
(b) правую переднюю подъемную колонну, верхний конец которой присоединен к раме и нижний конец которой присоединен к правому переднему узлу привода, при этом правая передняя подъемная колонна включает правый передний линейный исполнительный механизм, который может быть приведен в действие для подъема и опускания рамы дорожной фрезерной машины по отношению к дорожной поверхности;
(c) левую переднюю подъемную колонну, верхний конец которой присоединен к раме и ее нижний конец присоединен к левому переднему узлу привода, при этом левая передняя подъемная колонна включает левый передний линейный исполнительный механизм, который может быть приведен в действие для подъема и опускания рамы по отношению к дорожной поверхности;
(d) заднюю подъемную колонну, верхний конец которой присоединен к раме и нижний конец которой присоединен к заднему узлу привода, при этом задняя подъемная колонна включает задний линейный исполнительный механизм, который может быть приведен в действие для подъема и опускания рамы дорожной фрезерной машины по отношению к дорожной поверхности;
(e) контроллер, который:
(i) функционально соединен с правым передним датчиком положения по высоте и предназначен для приема сигнала с правого переднего конца торцевой заслонки, указывающего на положение по высоте переднего конца правой торцевой заслонки по отношению к дорожной поверхности;
(ii) функционально соединен с правым задним датчиком положения по высоте и предназначен для приема сигнала с правого заднего конца торцевой заслонки, указывающего на положение по высоте заднего конца правой торцевой заслонки по отношению к дорожной поверхности;
(iii) функционально соединен с левым передним датчиком положения по высоте и предназначен для приема сигнала с левого переднего конца торцевой заслонки, указывающего на положение по высоте переднего конца левой торцевой заслонки по отношению к дорожной поверхности;
(iv) функционально соединен с левым задним датчиком положения по высоте и предназначен для приема сигнала с левого заднего конца торцевой заслонки, указывающего на положение по высоте заднего конца левой торцевой заслонки по отношению к дорожной поверхности;
(v) функционально соединен с правым передним линейным исполнительным механизмом правой передней подъемной колонны и предназначен для регулирования положения по высоте правой передней подъемной колонны по отношению к дорожной поверхности;
(vi) функционально соединен с левым передним линейным исполнительным механизмом левой передней подъемной колонны и предназначен для регулирования положения по высоте левой передней подъемной колонны по отношению к дорожной поверхности;
(vii) функционально соединен с задним линейным исполнительным механизмом задней подъемной колонны и предназначен для регулирования положения по высоте задней подъемной колонны по отношению к дорожной поверхности;
(viii) предназначен для приема сигнала, определяющего выбор стороны, от оператора, выбирающего либо левую сторону, либо правую сторону дорожной фрезерной машины;
(ix) предназначен для приема сигнала, определяющего глубину фрезерования, от оператора, выбирающего требуемую глубину фрезерования;
(x) предназначен для определения фактической правой передней глубины фрезерования на правой стороне дорожной фрезерной машины с помощью сигнала с правого переднего конца торцевой заслонки;
(xi) предназначен для определения фактической правой задней глубины фрезерования на правой стороне дорожной фрезерной машины с помощью сигнала с правого заднего конца торцевой заслонки;
(xii) предназначен для определения фактической левой передней глубины фрезерования на левой стороне дорожной фрезерной машины с помощью сигнала с левого переднего конца торцевой заслонки;
(xiii) предназначен для определения фактической левой задней глубины фрезерования на левой стороне дорожной фрезерной машины с помощью сигнала с левого заднего конца торцевой заслонки;
(xiv) предназначен для управления линейным исполнительным механизмом в передней подъемной колонне на стороне, не выбранной оператором, путем усреднения фактической передней глубины фрезерования и фактической задней глубины фрезерования на невыбранной стороне дорожной фрезерной машины и путем использования указанной усредненной величины для корректировки положения по высоте передней подъемной колонны на невыбранной стороне для поддержания требуемой глубины фрезерования;
(xv) предназначен для управления линейным исполнительным механизмом в передней подъемной колонне на выбранной стороне путем использования фактической передней глубины фрезерования выбранной стороны дорожной фрезерной машины для корректировки положения по высоте передней подъемной колонны на выбранной стороне для поддержания требуемой глубины фрезерования;
(xvi) предназначен для управления линейным исполнительным механизмом в задней подъемной колонне путем использования фактической задней глубины фрезерования выбранной стороны дорожной фрезерной машины для корректировки положения по высоте задней подъемной колонны для поддержания требуемой глубины фрезерования; при этом способ включает:
(g), осуществление выбора требуемой глубины фрезерования и передачу данных о требуемой глубине фрезерования на контроллер;
(h) осуществление выбора либо правой стороны дорожной фрезерной машины, либо левой стороны дорожной фрезерной машины;
(i) функционирование контроллера для управления линейным исполнительным механизмом в передней подъемной колонне на стороне, не выбранной оператором, путем усреднения фактической передней глубины фрезерования и фактической задней глубины фрезерования на невыбранной стороне дорожной фрезерной машины и путем использования указанной усредненной величины для корректировки положения по высоте передней подъемной колонны на невыбранной стороне для поддержания требуемой глубины фрезерования;
(j) функционирование контроллера для управления линейным исполнительным механизмом в передней подъемной колонне на выбранной стороне путем использования фактической передней глубины фрезерования выбранной стороны дорожной фрезерной машины для корректировки положения по высоте передней подъемной колонны на выбранной стороне для поддержания требуемой глубины фрезерования;
(k) функционирование контроллера для управления линейным исполнительным механизмом в задней подъемной колонне путем использования фактической задней глубины фрезерования выбранной стороны дорожной фрезерной машины для корректировки положения по высоте задней подъемной колонны для поддержания требуемой глубины фрезерования.
| МАШИНА ДЛЯ ДОРОЖНОГО СТРОИТЕЛЬСТВА, ВЫРАВНИВАЮЩЕЕ УСТРОЙСТВО, А ТАКЖЕ СПОСОБ УПРАВЛЕНИЯ ГЛУБИНОЙ ФРЕЗЕРОВАНИЯ ИЛИ УКЛОНОМ ФРЕЗЕРОВАНИЯ МАШИНЫ ДЛЯ ДОРОЖНОГО СТРОИТЕЛЬСТВА | 2007 |
|
RU2394122C1 |
| US 20090108663 A1, 30.04.2009 | |||
| US 20140379227 A1, 25.12.2014 | |||
| US 20140333115 A1, 13.11.2014 | |||
| Устройство управления машиной для регенерирования и уплотнения асфальтобетонных покрытий | 1989 |
|
SU1620523A1 |

