Изобретение относится к области авиационной техники и касается создания авиационного комплекса вертикального взлета с распределенной тягой разновеликих винтов по схеме Х2+4, включающего со стыковочными узлами беспилотные тяжелый самолет-носитель (БТСН) и два легких многоцелевых самолета (БЛМС), снабженные соответственно большими и меньшими винтами, и позволяющего при вертикальном или горизонтальном расположении их фюзеляжей изменять трансформацию в воздухе с буксировочной шести- или двухвинтовой полетной конфигурации в раздельные три двухвинтовые конфигурации для выполнения вертикального и короткого взлета/посадки (ВВП и КВП), но и короткого взлета и вертикальной посадки (КВВП).
Известен проект "Tom-Tom" (США), состоящий из специально доработанного четырехвинтового бомбардировщика модели ЕВ-29А и авиагруппы, включающей два одновинтовых специальной конструкции истребителя модели EF-84B, которые имели возможность пристыковываться к бомбардировщику с использованием гибких креплений между законцовками трапециевидных крыльев самолетов и должны были для увеличения радиуса действия истребителей буксироваться самолетом-носителем.
Признаки, совпадающие - наличие бомбардировщика ЕВ-29А, имеющего на консолях крыла четыре тянущих винта и выполняющего роль летающего авианосца, несущего на концах крыла авиагруппировку, но и снабженного системой гибких креплений между законцовками крыльев бомбардировщика и двух истребителей EF-84B, обеспечивающих возможность при горизонтальном их полете пристыковываться последних к бомбардировщику и расстыковываться, но и осуществлять раздельный или совместный их взлет и посадку. Однако после катастрофы 24 апреля 1953 г. и с целью недопущения в дальнейшем летальных несчастных случаев, было решено не взлетать и не садиться с состыкованными истребителями, а прицепляться и отцепляться на концах крыла самолета-носителя уже в полете и на достаточной для этого высоте.
Причины, препятствующие поставленной задаче: первая - это то, что эта система проекта "Tom-Tom" показала себя опасной из-за мощных завихрений, сходящих с законцовок крыла самолета-носителя ЕВ-29, которые вызывали сильнейшие крены истребителей EF-84B, что снижало безопасность пилотируемых полетов, а для выполнения состыкованного их взлета и посадки требовалось удлинение высоты стоек шасси каждого EF-84B, выравнивающее на стоянке плоскости крыльев на едином уровне. Вторая - это то, что после стыковки в полете с самолетом-носителем один из EF-84B начал раскачиваться с большой амплитудой, но никаких систем аварийной расстыковки предусмотрено не было и при этом конусная штанга оказалась вырванной из крыла ЕВ-29А, и не все самолеты успешно выполнили посадку. Поэтому эксперименты со стыковкой "крыло-в-крыло" с применением узлов стыковки на соответствующих концах крыльев решили прекратить. Третья - это то, что эта концепция при буксировочном горизонтальном их полете является слишком опасной, так как турбулентность и спутные струи представляют серьезную проблему, усиливаемую четырьмя тянущими винтами самолета-носителя, особенно, когда консоли состыкованных крыльев находятся в единой плоскости их хорд. Все это ограничивает повышение безопасности, скорости и дальности полета, показателей транспортной и топливной эффективности, но и повышение поперечной стабилизации при буксировочном полете, а также возможность выполнения ВВП при палубном их базировании.
Известен проект самолета вертикального взлета и посадки (СВВП), выполненный по схеме "бесхвостка" под руководством академика Б.Н. Юрьева и И.П. Братухина, содержит короткий фюзеляж с взаимно перпендикулярными четырьмя консолями крестообразного крыла малого удлинения, на концах которых смонтированы четыре турбовинтовых двигателя (ТВД) в гондолах с тянущими соосными винтами, обеспечивающими выполнение технологии ВВП только при вертикальном расположении его фюзеляжа на четырехопорном шасси неубирающимся с амортизационными стойками, смонтированными в обтекателях на концах консолей крестообразного крыла.
Признаки, совпадающие - наличие фюзеляжа прямоугольного сечения с крестообразным крылом и силовой установкой (СУ), состоящей из четырех ТВД модели НК-12МВ мощностью по 12000 лс, которые использовались на бомбардировщике Ту-95 с тянущими соосными винтами диаметром 6 м, смонтированными на концах крыла и обеспечивающими выполнение ВВП только при соответствующем вертикальном расположении его фюзеляжа. Соосные винты имеют синхронизирующее и взаимно противоположное их вращение. Расчетная взлетная масса СВВП составляла 50…60 тонн в зависимости от условий полета, а максимальная взлетная тяга четырех соосных винтов - 90 тонн. Вертикально взлетающий самолет совершал вертикальный взлет, имея достаточную для набора высоты тяговооруженность (не менее 1,2-1,5), а затем должен был перейти к горизонтальному полету. В его носовой части находилась двухместная кабина экипажа. Кресла устанавливались на шарнирах с фиксацией, чтобы обеспечить комфортность экипажу при изменении положения фюзеляжа в процессе взлета и посадки. Проект 1954 года отличался оригинальностью компоновки и важнейшей особенностью этой разработки стала электрическая схема трансмиссии, заменившая традиционную механическую - с редукторами, валами и муфтами.
Причины, препятствующие поставленной задаче: первая - это то, что СВВП с движителем в виде четырех несущих соосных винтов, смонтированных в гондолах на концах прямых консолей крестообразного крыла и используемых как при выполнении ВВП, так и в горизонтальном полете, когда после набора большой вертикальной высоты до 1000 м летчик вводил его в пикирование и, набрав большую скорость из-за недостаточной несущей способности крыла, выходил на горизонтальный скоростной полет, что предопределяет значительный расход топлива при переходных режимах полета. Вторая - это то, что СВВП, имеющий четырехопорное шасси неубирающееся с амортизационными стойками, смонтированными в обтекателях на концах консолей прямого крыла, предопределяет только его вертикальный взлет при вертикальном расположении его фюзеляжа, что снижает безопасность в случае отказа одного или двух ТВД и возможности выполнить посадку "по-самолетному". Третья - это то, что в СВВП при вертикальном и горизонтальном его полете используются одни и те же его рулевые поверхности - рули направления и элевоны, находящиеся в воздушном потоке соосных винтов, неизменными из которых по своей сути остаются только элевоны для управления по тангажу, которые являются наиболее важными при переходе, что предопределяет необходимость при висении осуществлять перекладку данных рулей с управления по крену на рысканье, являющейся сложной задачей, не обеспечивающей стабильности управляемости по курсу. Все это ограничивает возможность дальнейшего упрощения управляемости по курсу при переходных режимах полета, повышения дальности полета, показателей транспортной и топливной эффективности и возможность выполнения технологии КВП при аэродромном его базировании.
Наиболее близким к предлагаемому изобретению является авиационный комплекс вертикального взлета, состоящий из беспилотных тяжелого самолета-носителя и двух буксируемых на концах крыла легких многоцелевых самолетов, каждый из которых представляет собой СВВП модели "XFV-1 Сэлмон" (США) [1] и имеет фюзеляж с передним размещением двигателя и двух соосных тянущих винтов, создающих по оси симметрии взлетную тягу, четырехопорное неубирающееся шасси с колесами, смонтированными в обтекателях на концах килей хвостового оперения.
Признаки, совпадающие - наличие схемы моноплана с трапециевидным крылом без закрылок и Х-образным оперением, верхние и нижние кили которого отклонены наружу от плоскости симметрии под углом 45°. Среднерасположенное крыло имело удлинение λ=4 с углом стреловидности по передней кромке χ=20° и удельную нагрузку на крыло 404 кг/м2. В носовой части фюзеляжа перед крылом были расположены боковые воздухозаборники для ТВД модели Allison YT-40-A-14 со взлетной мощностью 5260 л.с. Соосные винты, имеющие взаимно противоположное вращение, расположены в передней части фюзеляжа и обеспечивают взлетную и маршевую тягу при выполнении ВВП с вертикальным и горизонтальным расположением его фюзеляжа соответственно. Использование соосных винтов позволяло избежать разворачивающего момента, который особенно трудно компенсировать при выполнении ВВП, а также устранить влияние гироскопического эффекта вращающихся масс винтов диаметром 4,88 м. Расчетная взлетная масса СВВП составляла 6800-7170 кг в зависимости от условий полета, а максимальная взлетная тяга двух соосных винтов - 9000 кг. Первый вертикальный взлет СВВП совершил 02.08.1954 г. при соответствующем положении его фюзеляжа, имел достаточную для набора высоты тяговооруженность (не менее 1,25-1,32) и возможность перехода к горизонтальному полету. В его носовой части находилась одноместная кабина летчика. Кресло устанавливалось на шарнирах и могло отклоняться на угол 45° с фиксацией, чтобы обеспечить комфортность пилоту при изменении положения фюзеляжа в процессе вертикального взлета и посадки.
Причины, препятствующие поставленной задаче: первая - это то, что СВВП, имеющий четырехопорное шасси неубирающееся с амортизационными стойками, смонтированными в обтекателях на концах килей Х-образного оперения, предопределяет только его вертикальный взлет при вертикальном расположении его фюзеляжа и исключает возможность выполнить посадку "по-самолетному", что снижает безопасность. Вторая - это то, что диаметры соосных винтов при горизонтальном расположении фюзеляжа в самолетной конфигурации и на взлетно-посадочных его режимах "по-самолетному" потребуют оснащения трапециевидного крыла закрылками и значительную высоту стоек убирающегося шасси и, как следствие, это увеличивает массу планера и ухудшает весовую отдачу, а однодвигательная СУ, снижая надежность вертикального взлета при его отказе, ухудшает безопасность. Третья - это то, что трапециевидное в плане крыло без дополнительного непосредственного управления подъемной силой не обеспечивают способности повышения аэродинамической эффективности во всех областях летных режимов и, особенно, уменьшения как дистанции, так и скорости взлета-посадки, а средства аэродинамической балансировки при помощи рулевых поверхностей килей Х-образного оперения предопределяют сложную систему отклонения рулей с триммерами, что ухудшает продольную балансировку на переходных режимах полета и не обеспечивает достаточную стабильность управления и особенно на углах атаки от 40° до 50°. Четвертая - это то, что соосные трехлопастные винты с взаимно противоположным вращением, смонтированные в носовой части фюзеляжа СВВП и имеющие минимальный разнос между его винтами, что создает при вертикальном взлете и посадке неблагоприятное взаимное влияние (индуктивные потери) и вредную обдувку нижнего несущего винта верхним, усложняет схему редуцирования, а также значительно увеличивает массу редуктора и его высоту, что ограничивает возможности базирования и транспортирования. Пятая - это то, что Х-образное оперение не обеспечивает продольно-поперечной стабильности, и для улучшения этого фюзеляж СВВП имеет увеличенную длину, почти вдвое превышающую размах крыла, что значительно увеличивает массу его конструкции и, следовательно, предопределяет возможность только аэродромного его базирования. Все это ограничивает улучшение продольной управляемости и стабильности управления, увеличение взлетного веса и весовой отдачи, показателей транспортной и топливной эффективности, но и возможность палубного его использования и даже выполнения "по-самолетному" технологии КВП при аэродромном его базировании.
Предлагаемым изобретением решается задача в указанном выше известном экспериментальном СВВП модели "XFV-1 Сэлмон" (США) обеспечения возможности в составе авиационного комплекса осуществлять трансформацию с состыкованной шести- и двухвинтовой полетной конфигурации для вертикально взлетающего и буксировочного его полета в раздельные три двухвинтовые конфигурации с обеспечением взлетно-посадочных режимов и при горизонтальном расположении фюзеляжа, упрощения продольной управляемости при висении и повышения стабильности управления, улучшения при буксировочном полете поперечной управляемости и уменьшения вибраций при поперечной балансировке, повышения безопасности, высоты и дальности полета, но и показателей транспортной и топливной эффективности.
Отличительными признаками предлагаемого изобретения от указанного выше известного авиационного комплекса вертикального взлета, состоящего из беспилотных тяжелого самолета-носителя (БТСН) и двух буксируемых на концах крыла легких многоцелевых самолетов (БЛМС), каждый из которых представляет собой СВВП модели "XFV-1 Сэлмон", наиболее близкого к нему, являются наличие того, что он выполнен по концепции распределенной тяги разновеликих винтов (РТРВ) по схеме Х2+4, обеспечивающей возможность трансформации с состыкованной полетной его конфигурацией для вертикально взлетающего и горизонтального крейсерского полета соответственно при максимальной и маршевой тяге, создаваемой шестью и только двумя большими винтами БТСН при флюгерном положении четырех меньших винтов БЛМС в раздельные три двухвинтовые полетные конфигурации для горизонтального их полета для стыковки/расстыковки в воздухе соответственно после/для как короткого взлета/вертикальной посадки, так и короткого взлета/посадки, но и обратно, каждый из упомянутых БТСН и БМЛС выполнен по концепции "бесхвостка" и дупланной схеме при близком расположении первого крыла ко второму и оснащен двумя верхними и двумя нижними килями, выполненными соответственно с рулями направления и с отклоняемыми наружу концевыми частями, имеющими высоту при коротком взлете/посадке в сложенном положении, равную половине внутреннего радиуса арочного первого крыла, и смонтированными за задней кромкой второго крыла на соответствующих частях мотогондол, каждая из последних имеет винт с передним его расположением и внутри арочной консоли первого крыла с возможностью свободного его вращения в конце расходящейся внутренней арочной ее поверхности при создании им соответствующей тяги, а для выполнения синхронной стыковки/расстыковки по технологии "крыло-в-обтекатель пилона", каждый левый и правый БЛМС оснащен соответствующим расщепляемым ловителем, имеющим систему аварийной расстыковки пироболтами от соответствующей консоли второго его крыла и смонтированным с выносом за переднюю кромку и на законцовке этих крыльев, каждый из которых выполнен в виде "пинцета-ловителя" с механическими коробчатой формы пирамидальными губками, раскрываемыми в продольной плоскости параллельно плоскости симметрии соответствующего БЛМС, и имеющий в конце раскрытого его зева достаточный внутренний объем для свободного размещения внутри него закрепленной на кронштейнах вертикальной стержневой силовой связи, выполненной в виде пальца с наружным диаметром достаточным для улавливающего его обхвата раскрытыми горизонтальными полукольцевыми губками механического захвата-замка, каждый левый и правый из которых, взаимодействующий соответственно с правым и левым пальцем, смонтирован на конце шарнирных рычагов, выполненных в виде параллелограмма, имеющего привод, обеспечивающий перпендикулярно плоскости симметрии БТСН его разворот вдоль плоскости средней линии соответствующего второго крыла БЛМС и вынос как из обтекателя, смонтированного под соответствующей консолью второго крыла БТСН на пилоне, так и внос обратно в обтекатель после срабатывания захвата-замка удерживающего палец стыковочного узла и сжатия пирамидальных губок, верхняя и нижняя из которых, имея с соответствующих сторон проемы, обеспечивают свободное обжатие элементов крепления захвата-замка к шарнирным рычагам, а после заведения и размещения сложенных шарнирных рычагов в стыковочном обтекателе срабатывают механические замки фиксирующего стыковочного узла, ответная часть которого расположена на конце штанги расщепляемого ловителя и в плоскости средней лини второго крыла БЛМС, при этом разновеликие крылья БТСН и каждого БЛМС, большее второе крыло из которых с наплывами, снабженное внутренними, внешними и концевыми элевонами, смонтированными соответственно на не отклоняемых и отклоняемых его секциях, установлено ниже и позади первого меньшего арочного крыла, имеющего 40% площади второго крыла и диаметральную линию полукольцевых его каналов, расположенную параллельно средней линии не отклоняемым секциям второго крыла, и обеспечивающего дополнительную подъемную силу и защиту винтов от взаимовлияний и возможных их соприкосновений при трансформации, но и позволяющего получить малые скорости сваливания и повысить безопасность, особенно как при переходных маневрах для выполнения в воздухе трансформации в состыкованную схему РТРВ-Х2+4, так и при висении и вертикальной посадке или взлете с достижением в этой схеме полной компенсации реактивных крутящих моментов при противоположном направлении вращения между соответствующими левым и правым винтом в БТСН и каждом БЛМС, но и с обеспечением одинакового направления вращения между диагонально расположенными группами винтов двух левых и двух правых меньших винтов БЛМС, имеющих при виде сверху направление вращение соответственно по часовой стрелке и против и устраняющих гироскопический эффект и создающих более плавное обтекание соответствующих крыльев воздушным потоком от винтов, причем развитые в БТСН и каждом БЛМС внутренние и внешние элевоны второго крыла, расположенные в воздушном потоке их винтов, обеспечивают при синфазном и дифференциальном их отклонении как продольное и поперечное, так и продольное и путевое управление после автоматической перекладки в программируемом системно-логическом контроллере данных рулей - элевонов с управления по крену на рысканье соответственно при переходе с самолетной полетной конфигурации в вертолетную и при соответствующих режимах их полета с достижением как стабилизации продольного и поперечного их положения, так и стабилизации по угловой скорости рысканья и управляемости по курсу соответственно, при этом полукольцевые секции консолей арочного первого крыла БТСН и каждого БЛМС в передних и задних окончаниях их трапециевидных в плане законцовок, отклоненных назад и вверх выше верхней поверхности второго крыла, снабжен двумя парами телевизионных камер переднего и заднего панорамного видового обзора горизонта, особенно как по левому, так и правому их борту, обеспечивающие условия истинно дистанционного пилотирования оператором и упрощающие осуществления трансформации полетной его конфигурации, причем для раздельного полета при выполнении вертикального взлета/посадки или висения и БТСН, и двух БЛМС, которые выполнены с возможностью синхронного отклонения у них вверх к плоскости симметрии соответствующих концевых частей второго крыла, образующих у каждого из них не отклоняемую секцию, имеющую равновеликий размах с размахом внешней арочной поверхности первого крыла и, как следствие, уменьшая габариты вертолетной и стояночной площадки, позволяют при вертикальном положении их фюзеляжей увеличить с вертикальными их килями результирующую путевую устойчивость, при этом система трансмиссии БТСН и каждого БЛМС, обеспечивая передачу взлетной мощности турбовинтовых двигателей (ТВД) между двумя винтами второго крыла и включая наряду с синхронизирующими поперечными валами, связывающими Т-образные в плане главный редуктор с двумя промежуточными, имеет соединительные центральный и консольные продольные валы, связывающие посредством муфт свободного хода соответственно вспомогательную силовую установку и каждый ТВД с соответствующим Т-образным в плане промежуточным редуктором, снабжена продольными соединительными валами, размещенными соответственно по оси каждой подкрыльевой мотогондолы и связывающими выходной вал промежуточного редуктора через муфту сцепления с редуктором винта, причем с целью обеспечения возможности размещения на земле как по отдельности, так и состыкованного БТСН с каждым БЛМС при горизонтальном расположении их фюзеляжей, каждый из них снабжен выполненным по велосипедной схеме четырехопорным колесным шасси, имеющим наряду с носовой и кормовой основными его опорами с колесами, убирающимися в соответствующие ниши их фюзеляжей, оснащено вспомогательными их подкрыльными опорами с неубирающимися амортизационными колесами в обтекателях, смонтированных снаружи в нижней части их полукольцевых каналов арочного первого крыла для обеспечения выполнения как раздельного, так и состыкованного короткого взлета и посадки при горизонтальном расположении их фюзеляжей, при этом стыковочные обтекатели БТСН, смонтированные на подкрыльевых его пилонах дальше задней кромки и ниже средней линии его второго крыла, обеспечивают в направлении горизонтального полета соответственно отступы по горизонтали и вертикали состыкованных консолей второго крыла со вторыми крыльями левого и правого БЛМС, позволяющие в состыкованной стояночной их конфигурации на земле, повышая результирующую устойчивость БТСН с двумя БЛМС, выполненными масштабируемыми, каждый планер из двух последних в 
Кроме того, турбоэлектрическая силовая установка БТСН и каждого БЛМС, выполненная по параллельно-последовательной гибридной технологии силового привода, снабжена левой и правой мотогондолами с электромоторами, вращательно связанными с редукторами винтов, а вспомогательная силовая установка представляет собой гибридную мотогондолу, в которой наряду с поршневым двигателем (ПД), имеющим для отбора взлетной его мощности передний вывод вала, передающий крутящий момент на входной вал обратимого электромотора-генератора (ОЭМГ), выходной вал которого вращательно связанный с входным валом главного редуктора посредством муфт сцепления входной и выходной, установленных на соответствующих валах соответственно перед ПД и перед главным редуктором и оснащена системой электропривода, включающей все электромоторы, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электромоторы и ПД, переключающим генерирующую мощность и порядок подзарядки аккумуляторов от ОЭМГ, который в режиме электрогенератора при полетной двухвинтовой их конфигурации обеспечивает поочередно два способа генерации мощности в соответствующей гибридной мотогондоле только от внутреннего источника энергии - ПД, при этом каждая входная и выходная электромагнитные муфты сцепления, обеспечивающие дистанционное управление их сцеплением/расцеплением соответствующего вала ОЭМГ с выходным и входным валом соответственно ПД и главного редуктора, позволяют реализовать в гибридной мотогондоле три способа работы ПД и ОЭМГ, работающего в режиме и/или электромотора, соответственно при совместной передаче их взлетной и пиковой мощности на вал главного редуктора при вертикальном взлете/посадке и висении или из-за отказа ПД при его отключении от трансмиссии самостоятельной передачи номинальной мощности ОЭМГ только как от электромотора на вал главного редуктора, но и самостоятельной работы ПД при передаче как распределенной, так и всей его номинальной мощности как на вал последнего, обеспечивающего после выполнения короткого взлета/посадки горизонтальный полет в перегрузочном варианте, но и на входной вал ОЭМГ, работающего как электрогенератор с номинальной мощностью, так и на входной вал ОЭМГ, работающего как электрогенератор с максимальной мощностью при отключенном его выходном вале от главного редуктора соответственно.
Благодаря наличию этих признаков, позволяющих выполнить авиационный комплекс вертикального взлета (АКВВ), буксирующий авиагруппировку с системой распределенной тяги разновеликих винтов (ТРТВ) по схеме РТРВ-Х2+4, обеспечивающий трансформацию с состыкованной полетной его конфигурации для вертикально взлетающего и горизонтального полета соответственно с максимальной и маршевой тягой, создаваемой шестью и только двумя большими винтами в раздельные три двухвинтовые полетные конфигурации для горизонтального их полета для стыковки/расстыковки в воздухе соответственно после/для как короткого взлета/вертикальной посадки, так и короткого взлета/посадки, но и обратно, и включающую с большими и меньшими винтами соответственно БТСН и два БЛМС, синхронно состыкованных по технологии "крыло-в-обтекатель пилона", каждый буксируемый из них БЛМС оснащен расщепляемым ловителем, выполненным в виде "пинцета-ловителя" с пирамидальными губками, смонтированными на соответствующих законцовках консолей второго крыла левого и правого БЛМС, а шарнирные рычаги с механическим захватом-замком установлены в обтекателе и нижней части пилона каждой консоли второго крыла БТСН, обеспечивают возможность выполнения стыковки/расстыковки в воздухе. При этом подкрыльевые обтекатели БТСН, смонтированные на его пилонах, создающих в состыкованной стояночной их конфигурации на земле расположение на одном уровне всех самоустанавливающихся колес двенадцатиопорного шасси соответственно и с вертикальным, и горизонтальным расположением фюзеляжей БТСН с двумя БЛМС, выполненными масштабируемыми, каждый из двух последних в  раза меньше первого. Каждый из БТСН и БЛМС выполнен по концепции "бесхвостка" и дупланной схеме с близко расположенным первым крылом и оснащен двумя верхними и двумя нижними килями, выполненными соответственно с рулями направления и с отклоняемыми наружу концевыми частями, смонтированными соответственно на концах крыльевых мотогондол второго крыла, снабженных соответствующими винтами, вынесенными за переднюю кромку второго крыла и расположенными в арочных консолях первого крыла с возможностью свободного их вращения в конце расходящейся внутренней арочной его поверхности при создании ими соответствующей тяги. Разновеликие крылья, большее второе из которых с наплывами, оснащенное элевонами и имеющее размах, способствующий свободным трансформирующим операциям по изменению полетной конфигурации как на земле при стоянке с вертикальным положением фюзеляжа, так и в воздухе при зависании и крейсерском полете соответственно с вертикальным и горизонтальным положением фюзеляжа, смонтировано ниже и позади первого меньшего арочного крыла, расположенного по внешним бортам фюзеляжа, имеющего 40% площади второго крыла и обеспечивающего дополнительную подъемную силу и защиту винтов от взаимовлияний и возможных их соприкосновений при трансформации, но и позволяющего получить малые скорости сваливания и повысить безопасность. Система трансмиссии БТСН и каждого БЛМС, обеспечивая передачу взлетной мощности двигателей между винтами двухвинтовой поперечной схемы и включая наряду с синхронизирующими поперечными валами, связывающими Т-образные в плане главный редуктор с двумя промежуточными, имеет соединительные центральный и консольные продольные валы, связывающие посредством муфт свободного хода соответственно вспомогательную СУ и каждый двигатель с соответствующим Т-образным в плане промежуточным редуктором, снабжена продольными соединительными валами, размещенными соответственно по оси каждой мотогондолы и связывающими выходной вал промежуточного редуктора через муфту сцепления с редуктором винта.
раза меньше первого. Каждый из БТСН и БЛМС выполнен по концепции "бесхвостка" и дупланной схеме с близко расположенным первым крылом и оснащен двумя верхними и двумя нижними килями, выполненными соответственно с рулями направления и с отклоняемыми наружу концевыми частями, смонтированными соответственно на концах крыльевых мотогондол второго крыла, снабженных соответствующими винтами, вынесенными за переднюю кромку второго крыла и расположенными в арочных консолях первого крыла с возможностью свободного их вращения в конце расходящейся внутренней арочной его поверхности при создании ими соответствующей тяги. Разновеликие крылья, большее второе из которых с наплывами, оснащенное элевонами и имеющее размах, способствующий свободным трансформирующим операциям по изменению полетной конфигурации как на земле при стоянке с вертикальным положением фюзеляжа, так и в воздухе при зависании и крейсерском полете соответственно с вертикальным и горизонтальным положением фюзеляжа, смонтировано ниже и позади первого меньшего арочного крыла, расположенного по внешним бортам фюзеляжа, имеющего 40% площади второго крыла и обеспечивающего дополнительную подъемную силу и защиту винтов от взаимовлияний и возможных их соприкосновений при трансформации, но и позволяющего получить малые скорости сваливания и повысить безопасность. Система трансмиссии БТСН и каждого БЛМС, обеспечивая передачу взлетной мощности двигателей между винтами двухвинтовой поперечной схемы и включая наряду с синхронизирующими поперечными валами, связывающими Т-образные в плане главный редуктор с двумя промежуточными, имеет соединительные центральный и консольные продольные валы, связывающие посредством муфт свободного хода соответственно вспомогательную СУ и каждый двигатель с соответствующим Т-образным в плане промежуточным редуктором, снабжена продольными соединительными валами, размещенными соответственно по оси каждой мотогондолы и связывающими выходной вал промежуточного редуктора через муфту сцепления с редуктором винта.
Кроме того, в гибридной СУ БТСН и каждого БЛМС во время крейсерского полета увеличение генерирующей мощности для электропитания, когда падение заряда литиево-ионных полимерных аккумуляторов снизится до 25% от его максимума, обеспечивается турболектрической СУ, выполненной по параллельно-последовательной гибридной технологии силового привода, снабжена левой и правой мотогондолами с электромоторами, вращательно связанными с редукторами соответствующих винтов, но и оснащена гибридной мотогондолой, в которой наряду с ПД, имеющим для отбора взлетной его мощности передний вывод вала, передающий крутящий момент на входной вал ОЭМГ, входной вал и выходной вал которого вращательно связанны соответственно с выходным валом ПД и входным валом главного редуктора посредством муфт сцепления, установленных на соответствующих валах соответственно перед ПД и перед главным редуктором, и оснащена системой электропривода, включающей все электромоторы, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электромоторы и ПД, переключающим генерирующую мощность и порядок подзарядки аккумуляторов от ОЭМГ, который в режиме электрогенератора вращается от внутреннего источника мощности - ПД.
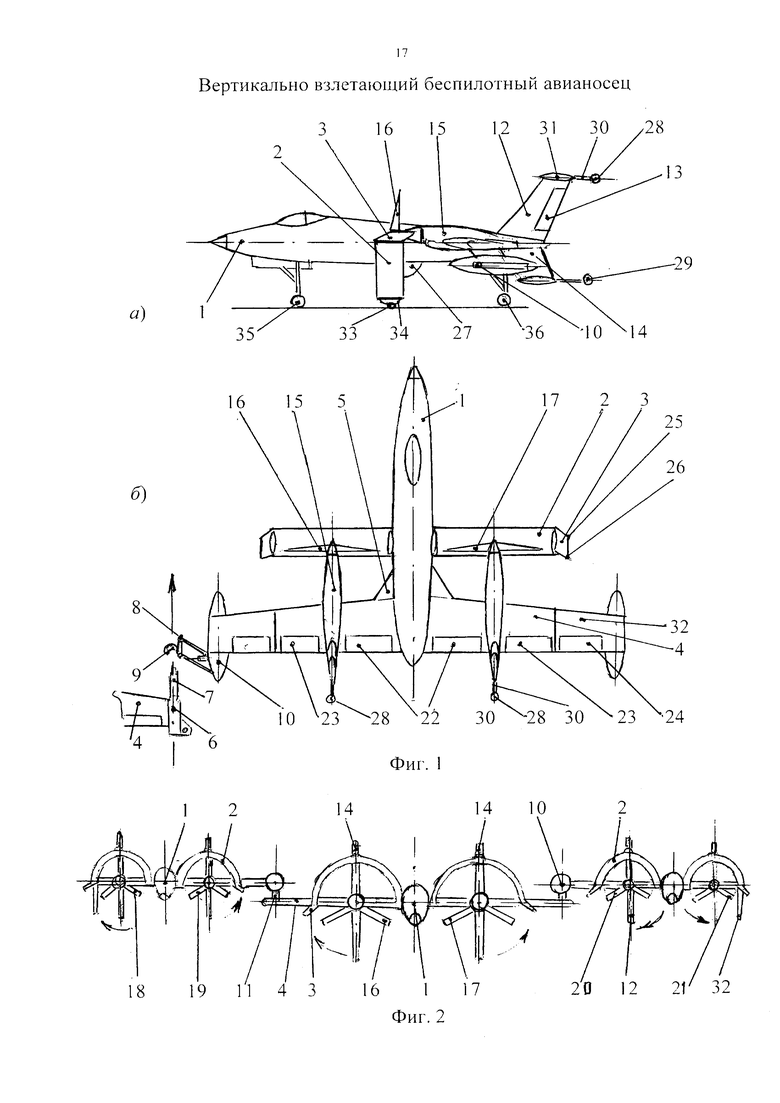
Предлагаемое изобретение многоцелевого АКВВ, состоящего из БТСН и двух БЛМС, иллюстрируется общими видами на фиг. 1 и 2 с вариантами их раздельного и совместного использования при выполнении КВП и ВВП соответственно.
На фиг. 1 изображен турбовинтовой БТСН (БЛМС) на общих видах сбоку и сверху в полетной конфигурации самолета при выполнении КВП со сложенными нижними килями и системой стыковки в воздухе (показана только с левой стороны).
На фиг. 2 изображен шестивинтовой несущей схемы РТРВ-Х2+4 турбовинтовой АКВВ при выполнении ВВП с вертикальным расположением его фюзеляжей, имеющий один БТСН с большими винтами и два БЛМС с меньшими винтами, состыкованные "крыло-в-обтекатель пилона" узлами стыковки, смонтированными на соответствующих концах крыльев БТСН и законцовках БЛМС, а у двух крайних в АКВВ отклонены вверх к плоскости их симметрии только внешние консоли второго крыла.
Турбовинтовой БТСН (БЛМС), представленный на фиг. 1 и 2 при раздельном и состыкованном его использовании соответственно при выполнении КВП и ВВП в составе АКВВ, выполнен по концепции "бесхвостка" и дупланной схеме, содержит фюзеляж 1, имеющий удобообтекаемую форму и среднерасположенные тандемные крылья. Близкое расположение крыльев друг перед другом и уступом с арочным первым крылом 2, снабженным трапециевидными законцовками 3, отклоненными назад и вверх и размещенными выше второго трапециевидного крыла 4, имеющего наплывы 5. Стыковочная система, обеспечивающая возможность осуществления стыковки/расстыковки БТСН и двух БЛМС в составе АКВВ по технологии "крыло-в-обтекатель пилона", включает расщепляемые ловители 6, выполненные в виде "пинцета-ловителя" с пирамидальными губками 7, смонтированными на соответствующих законцовках второго крыла 4 БЛМС, а шарнирные рычаги 8 с механическим захватом-замком 9 установлены в обтекателях 10 и на подкрыльевых пилонах 11 второго крыла 4 БТСН (см. фиг. 1). Каждый БТСН (БЛМС) оснащен четырьмя килями, два верхних 12 из которых имеют рули направления 13 и два нижних 14 из них выполнены с отклоняемыми наружу концами, имеющими высоту при КВП в сложенном положении, равную половине внутреннего радиуса арочного первого крыла 2, и смонтированы на удлиненных концах мотогондол 15, снабженных флюгерно-реверсивными винтами левым/правым соответственно большими 16/17 и меньшими для левого и правого БЛМС - 18/19 и 20/21 соответственно, вынесенными за переднюю кромку второго крыла 4 и размещенными в арочных консолях первого крыла 2 с возможностью свободного их вращения в конце расходящейся внутренней арочной его поверхности при создании ими тяги. Тянущие винты левые/правые большие 16/17 и меньшие 18/19 и 20/21 с жестким креплением лопастей, вращающиеся в противоположных направлениях (см. фиг. 2), снабжены возможностью изменения скорости вращения, выполнены из угле- и стеклопластика со стальными лонжеронами и установлены в обтекателях. В обтекателе подкрыльевых мотогондол 15, имеющих спереди кок с широким диапазоном изменения углов установки их лопастей. Не отклоняемые и отклоняемые 32 секции второго крыла 4 снабжены соответственно элевонами внутренними 22, внешними 23 и концевыми 24. Каждый полукольцевой канал арочного крыла 2 БТСН (БЛМС) в передних и задних окончаниях их трапециевидных в плане законцовок 3 снабжен двумя парами телевизионных камер переднего 25 и заднего 26 панорамного видового обзора горизонта. Система трансмиссии БТСН (БЛМС), обеспечивая передачу взлетной мощности ТВД между большими винтами 16/17 (меньшими 18/19 и 20/21) и включая наряду с синхронизирующими поперечными валами, связывающими Т-образные в плане главный редуктор с двумя промежуточными, имеет соединительные центральный и консольные продольные валы, связывающие посредством муфт свободного хода соответственно вспомогательную СУ и каждый ТВД с соответствующим Т-образным в плане промежуточным редуктором, снабжена продольными соединительными валами, размещенными соответственно по оси каждой мотогондолы и связывающими выходной вал промежуточного редуктора через муфту сцепления с редуктором винта (на фиг. 1 и 2 не показаны). Для размещения целевой нагрузки - оптико-электронной, радиотехнической и разведывательной аппаратуры (для видовой разведки, телевизионного и инфракрасного наблюдения местности в реальном масштабе времени), а также широкополосного передатчика с антенной для передачи изображения по телевизионному радиоканалу предусмотрен в фюзеляже 1 отсек 27. При вертикальном расположении фюзеляжа 1 на концах килей 12 и 14 хвостового оперения используется четырехопорное неубирающееся шасси с небольшими самоустанавливающимися колесами соответственно 28 и 29 на амортизационных стойках 30, смонтированных в обтекателях 31. Для уменьшения габаритов вертолетной и стояночной площадки при выполнении ВВП с вертикальным расположением фюзеляжей 1 БТСН и БЛМС, вторые крылья 4 которых снабжены отклоняемыми у них вверх к плоскости симметрии соответствующих внешних их консолей 32 (см. фиг. 2). При горизонтальном расположении фюзеляжа 1 используются вспомогательные подкрыльные опоры с неубирающимися амортизационными колесами 33 в обтекателях 34, смонтированных снаружи в нижней части полукруглых каналов арочного крыла 2, четырехопорного шасси велосипедной схемы, носовая и кормовая основные его опоры с колесами 35 и 36 убираются в соответствующие ниши фюзеляжа 1.
Управление высокоскоростным турбовинтовым БТСН (БЛМС) и их в составе АКВВ обеспечивается общим и дифференциальным изменением шага больших 16/17 и меньших 18/19 и 20/21 винтов, но и отклонением рулей направления 13 и элевонов внутренних 22, внешних 23 и концевых 24, работающих в зоне активного обдува этих винтов. При крейсерском полете подъемная сила создается крыльями 2 и 4, горизонтальная тяга - винтами большими 16/17 и меньшим 18/19 и 20/21, на режиме висения только винтами большими 16/17 и меньшим 18/19 и 20/21, на режиме перехода - крыльями 2 и 4 с винтами большими 16/17 и меньшим 18/19 и 20/21. При взлетно-посадочных режимах полета и выполнении КВП с горизонтальным расположением фюзеляжа 1 подъемная сила создается крыльями 2 и 4 с отклоненными элевонами 22, 23 и 24 второго крыла 4 на максимальные углы. При этом современная система механизации крыла с предкрылками, закрылками и щелевыми элевонами могут генерировать коэффициент подъемной силы 5,5. Но только совместное использование перечисленных средств механизации второго крыла с концепцией близко расположенного к нему арочного крыла позволит коэффициент подъемной силы увеличить в 2-3 раза и достичь значительного роста статической подъемной силы. Это позволит уменьшить взлетную скорость с 94 км/ч до 66 км/ч, если традиционные сечения крыла были заменены полукольцевыми каналами, позволяющими подниматься в воздух на крайне малой скорости сваливания за счет интенсивного обдува верхней части арочного крыла, чем и обеспечивается ощутимый прирост подъемной силы на малой скорости.
После крейсерского горизонтального полета и при переходе к раздельной вертикальной посадке (висению) боле приемлемой является технология постепенного перехода с увеличенным углом атаки крыльев 2 и 4, чем переход «свечкой», когда БТСН (БЛМС), сделав «свечку», переходят в вертикальное положение, после их зависания, они могут затем снижаться хвостом вниз. Причем при посадке БТСН с взлетным весом 7-9 тонн с переходом «свечкой» требуется иметь потолок вертикального подъема по крайней мере 1000 м, в то время как постепенный переход от горизонтального полета к вертикальному зависанию перед посадкой можно выполнить и на высоте 150 м. Для вертикального буксировочного подъема БТСН с БЛМС в составе АКВВ исполнения РТРВ-Х2+4 необходимо одновременно увеличить шаг шести винтов больших 16/17 и меньших 18/19 и 20/21 с одновременным с увеличением мощности всех двигателей СУ, и АКВВ вертикально поднимется до высоты 60 м. На этой высоте после уменьшения шага винтов больших 16/17 и меньших 18/19 и 20/21 и мощности двигателей до тех пор, пока АКВВ не зависнет при вертикальном положении его фюзеляжей 1. При висении на вертолетных режимах полета как продольное управление АКВВ осуществляется изменением шага винтов передней группы меньших винтов 18-19 с 20-21 и задней группы 16-17 больших винтов, так и путевое управление - изменением крутящих моментов каждой диагональной группы винтов, имеющих одинаковое направление вращения несущих винтов в левом и правом БЛМС с БТСН, например, двух винтов левый-правый 19-17 и двух правый-левый 20-16, но и соответственно при одновременном как синфазном, так и дифференциальном отклонении элевонов 22-23 в БТСН и двух БЛМС (см. фиг. 2). Поперечное управление обеспечивается изменением шага меньшей группы винтов левого и правого БЛМС соответственно винтами 18-19 и 20-21, осуществляющих поперечную балансировку при одновременном изменении шага винтов этих групп (см. фиг. 2). Отсутствие при висении перекрытия больших 16/17 и меньших 18/19 и 20/21 винтов также значительно снижает вредное взаимовлияние и повышает их заполнение, что, в свою очередь, значительно уменьшает проблему срыва потока. Для горизонтального полета после завершения режима висения АКВВ переходит на режим наклона и, наклоняясь носом вниз, он начнет перемещаться горизонтально. По мере увеличения наклона АКВВ скорость его увеличится и возможен переход к скоростному его буксировочному горизонтальному полету. После набора высоты и после перехода АКВВ на крейсерский буксировочный режим полета левого и правого БЛМС отключаются ТВД и меньшие 18/19 и 20/21 винты синхронно устанавливаются во флюгерное положение. При этом путевое управление обеспечивается рулями направления 13 БТСН и БЛМС. Продольное и поперечное управление также осуществляется в БТСН и БЛМС отклонением элевонов 22-23 и концевых элевонов 24 соответственно. На самолетных режимах полета АКВВ при создании горизонтальной тяги его большие винты левый 16 и правый 17 имеют взаимно противоположное их вращения в БТСН и тем самым соответственно устраняют гироскопический эффект и обеспечивают более плавное обтекание его крыльев 2 и 4, но и весьма повышающее эффективность крейсерского полета. При полете АКВВ в вертолетной конфигурации с шестивинтовой несущей схемой реактивные моменты от больших 16/17 и меньших 18/19 и 20/21 винтов, используемых как несущие винты, компенсируются полностью за счет также взаимно противоположного их вращения в соответствующих группах винтов БТСН и двух БЛМС.
Таким образом, аэродинамическая схема многовинтового АКВВ была принята по концепции распределенной тяги разновеликих винтов и технологии многорежимной аэродинамической системы управления балансировкой по курсу и тангажу с полной компенсацией реактивного крутящего момента. Выбор такой схемы для АКВВ исполнения РТРВ-Х2+4 обусловлен простотой и возможностью преобразования его полетной конфигурации с буксировочной шести- или двухвинтовой полетной конфигурации в раздельные три двухвинтовые конфигурации для выполнения миссии двух БЛМС и барражирующего полета БТСН возле зоны для последующей стыковки. При этом выбор аэродинамической схемы, особенно, такого АКВВ не всегда диктуется только соображениями получения наилучших летно-технических характеристик.
Поэтому при формировании аэродинамической компоновки АКВВ исполнения РТРВ-Х2+4 большую роль играет необходимость обеспечения условий его использования на протяженных трассах при длительном времени буксировочного крейсерского режима полета, а также обеспечения высокого уровня надежности и безопасности полета при его управлении, особенно при выполнении стыковки и переходного маневра, заходе на зависание и во время самой вертикальной посадки. Снижение аварийности достигается уменьшением скорости АКВВ и принятием специальных мер (дупланная схема с близким расположением крыльев, обеспечат соответственно хорошие противосрывные и противоштопорные характеристики, а переднее крыло с полукольцевыми каналами - большую подъемную силу). Ожидаемый эффект от такой конструкции и расположения тандемных крыльев при ощутимом уменьшении взлетной и скорости сваливания в 1,42 раза меньше, чем если полукольцевые каналы были заменены традиционным сечением крыла - это упрощение стыковочных операций.
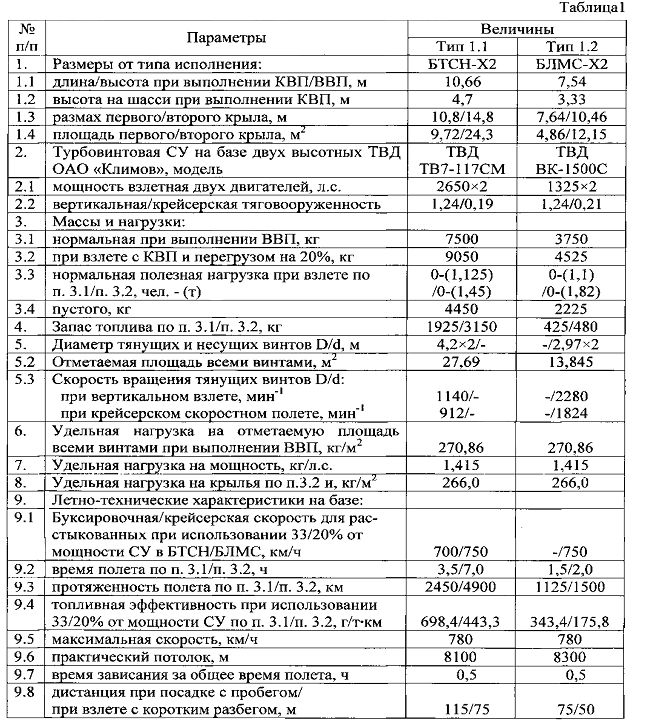
В настоящее время известно, что конструктивно-силовая дупланная схема с близкорасположенными тандемными крыльями обеспечивает максимальную разгрузку и фюзеляжа и несущих винтов от действия аэродинамических и массовых сил, а шестивинтовые вертолеты, что они устойчивы и управляемы, то, следовательно, все они пригодны для дальнейших инженерных приложений, могут и должны являться предметом их исследования и усовершенствования. Поэтому дальнейшие исследования по созданию двухвинтовых высокоскоростных вертикально взлетающих БТСН и БЛМС, которые могут применяться и АКВВ исполнения РТРВ-Х2+4, используя вышеназванные преимущества, позволят освоить ряд его компонентов (см. табл. 1).
Предварительные технические требования к компонентам палубного АКВВ-Х2+4
Литература
1. Американские самолеты вертикального взлета. Ружицкий Е.И., г. Москва,
Астраль. ACT, 2000 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2016 |
|
RU2643063C2 |
| ЛЕГКИЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2579235C1 |
| МНОГОВИНТОВОЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2568517C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |
| МНОГОВИНТОВОЙ ГИБРИДНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2543120C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2548304C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2547155C1 |
| АВИАТРАНСФОРМЕР, ПРЕОБРАЗУЕМЫЙ В АВТОМОБИЛЬ | 2016 |
|
RU2650257C1 |
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОСАМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2558168C1 |
Изобретение относится к области авиационной техники. Авиационный комплекс вертикального взлета (АКВВ) состоит из беспилотных тяжелого самолета-носителя (БТСН) и двух буксируемых на концах крыла легких многоцелевых самолетов (БЛМС), каждый из которых имеет фюзеляж с передним размещением двигателя и двух соосных тянущих винтов, четырехопорное неубирающееся шасси с колесами, смонтированными в обтекателях на концах килей хвостового оперения. АКВВ выполнен по концепции распределенной тяги разновеликих винтов (РТРВ) по схеме Х2+4, обеспечивающей возможность трансформации с состыкованной полетной его конфигурации для вертикально взлетающего и горизонтального крейсерского полета в раздельные три двухвинтовые полетные конфигурации для горизонтального полета, стыковки/расстыковки в воздухе. БТСН и БМЛС выполнены по концепции "бесхвостка" и дупланной схеме и оснащен двумя верхними и двумя нижними килями. Каждая мотогондола имеет винт с передним расположением внутри арочной консоли первого крыла. Для выполнения стыковки/расстыковки по технологии "крыло - в обтекатель пилона" каждый БЛМС оснащен соответствующим расщепляемым ловителем, имеющим систему аварийной расстыковки пироболтами. Достигается упрощение продольной управляемости при висении, улучшение поперечной управляемости при буксировочном полете. 1 з.п. ф-лы, 2 ил., 1 табл.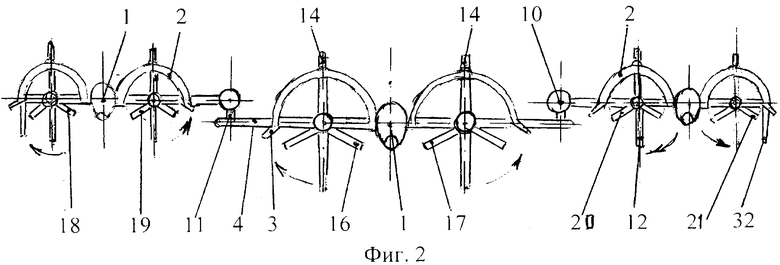
1. Авиационный комплекс вертикального взлета, состоящий из беспилотных тяжелого самолета-носителя (БТСН) и двух буксируемых на концах крыла легких многоцелевых самолетов (БЛМС), каждый из которых имеет фюзеляж с передним размещением двигателя и двух соосных тянущих винтов, создающих по оси симметрии взлетную тягу, четырехопорное неубирающееся шасси с колесами, смонтированными в обтекателях на концах килей хвостового оперения, отличающийся тем, что он выполнен по концепции распределенной тяги разновеликих винтов (РТРВ) по схеме Х2+4, обеспечивающей возможность трансформации с состыкованной полетной его конфигурации для вертикально взлетающего и горизонтального крейсерского полета соответственно при максимальной и маршевой тяге, создаваемой шестью и только двумя большими винтами БТСН при флюгерном положении четырех меньших винтов БЛМС в раздельные три двухвинтовые полетные конфигурации для горизонтального их полета для стыковки/расстыковки в воздухе соответственно после/для как короткого взлета/вертикальной посадки, так и короткого взлета/посадки, но и обратно, каждый из упомянутых БТСН и БМЛС выполнен по концепции "бесхвостка" и дупланной схеме при близком расположении первого крыла ко второму и оснащен двумя верхними и двумя нижними килями, выполненными соответственно с рулями направления и с отклоняемыми наружу концевыми частями, имеющими высоту при коротком взлете/посадке в сложенном положении равной половине внутреннего радиуса арочного первого крыла, и смонтированными за задней кромкой второго крыла на соответствующих частях мотогондол, каждая из последних имеет винт с передним его расположением и внутри арочной консоли первого крыла с возможностью свободного его вращения в конце расходящейся внутренней арочной ее поверхности при создании им соответствующей тяги, а для выполнения синхронной стыковки/расстыковки по технологии "крыло-в-обтекатель пилона", каждый левый и правый БЛМС оснащен соответствующим расщепляемым ловителем, имеющим систему аварийной расстыковки пироболтами от соответствующей консоли второго его крыла и смонтированным с выносом за переднюю кромку и на законцовке этих крыльев, каждый из которых выполнен в виде "пинцета-ловителя" с механическими коробчатой формы пирамидальными губками, раскрываемыми в продольной плоскости параллельно плоскости симметрии соответствующего БЛМС, и имеющий в конце раскрытого его зева достаточный внутренний объем для свободного размещения внутри него закрепленной на кронштейнах вертикальной стержневой силовой связи, выполненной в виде пальца с наружным диаметром, достаточным для улавливающего его обхвата раскрытыми горизонтальными полукольцевыми губками механического захвата-замка, каждый левый и правый из которых взаимодействующий соответственно с правым и левым пальцем, смонтирован на конце шарнирных рычагов, выполненных в виде параллелограмма, имеющего привод, обеспечивающий перпендикулярно плоскости симметрии БТСН его разворот вдоль плоскости средней линии соответствующего второго крыла БЛМС и вынос как из обтекателя, смонтированного под соответствующей консолью второго крыла БТСН на пилоне, так и внос обратно в обтекатель после срабатывания захвата-замка удерживающего палец стыковочного узла и сжатия пирамидальных губок, верхняя и нижняя из которых, имея с соответствующих сторон проемы, обеспечивают свободное обжатие элементов крепления захвата-замка к шарнирным рычагам, а после заведения и размещения сложенных шарнирных рычагов в стыковочном обтекателе срабатывают механические замки фиксирующего стыковочного узла, ответная часть которого расположена на конце штанги расщепляемого ловителя и в плоскости средней лини второго крыла БЛМС, при этом разновеликие крылья БТСН и каждого БЛМС, большее второе крыло из которых с наплывами, снабженное внутренними, внешними и концевыми элевонами, смонтированными соответственно на не отклоняемых и отклоняемых его секциях, установлено ниже и позади первого меньшего арочного крыла, имеющего 40% площади второго крыла и диаметральную линию полукольцевых его каналов, расположенную параллельно средней линии не отклоняемым секциям второго крыла, и обеспечивающего дополнительную подъемную силу и защиту винтов от взаимовлияний и возможных их соприкосновений при трансформации, но и позволяющего получить малые скорости сваливания и повысить безопасность, особенно как при переходных маневрах для выполнения в воздухе трансформации в состыкованную схему РТРВ-Х2+4, так и при висении и вертикальной посадке или взлете с достижением в этой схеме полной компенсации реактивных крутящих моментов при противоположном направлении вращения между соответствующими левым и правым винтом в БТСН и каждом БЛМС, но и с обеспечением одинакового направления вращения между диагонально расположенными группами винтов двух левых и двух правых меньших винтов БЛМС, имеющих при виде сверху направление вращение соответственно по часовой стрелке и против и устраняющих гироскопический эффект и создающих более плавное обтекание соответствующих крыльев воздушным потоком от винтов, причем развитые в БТСН и каждом БЛМС внутренние и внешние элевоны второго крыла, расположенные в воздушном потоке их винтов, обеспечивают при синфазном и дифференциальном их отклонении как продольное и поперечное, так и продольное и путевое управление после автоматической перекладки в программируемом системно-логическом контроллере данных рулей - элевонов с управления по крену на рысканье соответственно при переходе с самолетной полетной конфигурации в вертолетную и при соответствующих режимах их полета с достижением как стабилизации продольного и поперечного их положения, так и стабилизации по угловой скорости рысканья и управляемости по курсу соответственно, при этом полукольцевые секции консолей арочного первого крыла БТСН и каждого БЛМС в передних и задних окончаниях их трапециевидных в плане законцовок, отклоненных назад и вверх выше верхней поверхности второго крыла, снабжен двумя парами телевизионных камер переднего и заднего панорамного видового обзора горизонта, особенно как по левому, так и правому их борту, обеспечивающие условия истинно дистанционного пилотирования оператором и упрощающие осуществления трансформации полетной его конфигурации, причем для раздельного полета при выполнении вертикального взлета/посадки или висения и БТСН, и двух БЛМС, которые выполнены с возможностью синхронного отклонения у них вверх к плоскости симметрии соответствующих концевых частей второго крыла, образующих у каждого из них не отклоняемую секцию, имеющую равновеликий размах с размахом внешней арочной поверхности первого крыла и, как следствие, уменьшая габариты вертолетной и стояночной площадки, позволяют при вертикальном положении их фюзеляжей увеличить с вертикальными их килями результирующую путевую устойчивость, при этом система трансмиссии БТСН и каждого БЛМС, обеспечивая передачу взлетной мощности турбовинтовых двигателей (ТВД) между двумя винтами второго крыла и включая наряду с синхронизирующими поперечными валами, связывающими Т-образные в плане главный редуктор с двумя промежуточными, имеет соединительные центральный и консольные продольные валы, связывающие посредством муфт свободного хода соответственно вспомогательную силовую установку и каждый ТВД с соответствующим Т-образным в плане промежуточным редуктором, снабжена продольными соединительными валами, размещенными соответственно по оси каждой подкрыльевой мотогондолы и связывающими выходной вал промежуточного редуктора через муфту сцепления с редуктором винта, причем с целью обеспечения возможности размещения на земле как по отдельности, так и состыкованного БТСН с каждым БЛМС при горизонтальном расположении их фюзеляжей, каждый из них снабжен, выполненным по велосипедной схеме четырехопорным колесным шасси, имеющим наряду с носовой и кормовой основными его опорами с колесами, убирающимися в соответствующие ниши их фюзеляжей, оснащено вспомогательными их подкрыльными опорами с неубирающимися амортизационными колесами в обтекателях, смонтированных снаружи в нижней части их полукольцевых каналов арочного первого крыла для обеспечения выполнения как раздельного, так и состыкованного короткого взлета и посадки при горизонтальном расположении их фюзеляжей, при этом стыковочные обтекатели БТСН, смонтированные на подкрыльевых его пилонах дальше задней кромки и ниже средней линии его второго крыла, обеспечивают в направлении горизонтального полета соответственно отступы по горизонтали и вертикали состыкованных консолей второго крыла со вторыми крыльями левого и правого БЛМС, позволяющие в состыкованной стояночной их конфигурации на земле, повышая результирующую устойчивость БТСН с двумя БЛМС, выполненными масштабируемыми, каждый планер из двух последних в раза меньше первого, расположить на одном уровне все самоустанавливающиеся колеса двенадцатиопорного шасси соответственно с вертикальным и горизонтальным расположением их фюзеляжей.
2. Авиационный комплекс вертикального взлета по п. 1, отличающийся тем, что турбоэлектрическая силовая установка БТСН и каждого БЛМС, выполненная по параллельно-последовательной гибридной технологии силового привода, снабжена левой и правой мотогондолами с электромоторами, вращательно связанными с редукторами винтов, а вспомогательная силовая установка представляет собой гибридную мотогондолу, в которой наряду с поршневым двигателем (ПД), имеющим для отбора взлетной его мощности передний вывод вала, передающий крутящий момент на входной вал обратимого электромотора-генератора (ОЭМГ), выходной вал которого, вращательно связанный с входным валом главного редуктора посредством муфт сцепления входной и выходной, установленных на соответствующих валах соответственно перед ПД и перед главным редуктором, и оснащена системой электропривода, включающей все электромоторы, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электромоторы и ПД, переключающим генерирующую мощность и порядок подзарядки аккумуляторов от ОЭМГ, который в режиме электрогенератора при полетной двухвинтовой их конфигурации обеспечивает поочередно два способа генерации мощности в соответствующей гибридной мотогондоле только от внутреннего источника энергии - ПД, при этом каждая входная и выходная электромагнитные муфты сцепления, обеспечивающие дистанционное управление их сцеплением/расцеплением соответствующего вала ОЭМГ с выходным и входным валом соответственно ПД и главного редуктора, позволяют реализовать в гибридной мотогондоле три способа работы ПД и ОЭМГ, работающего в режиме и/или электромотора, соответственно при совместной передаче их взлетной и пиковой мощности на вал главного редуктора при вертикальном взлете/посадке и висении или из-за отказа ПД при его отключении от трансмиссии самостоятельной передачи номинальной мощности ОЭМГ только как от электромотора на вал главного редуктора, но и самостоятельной работы ПД при передаче как распределенной, так и всей его номинальной мощности как на вал последнего, обеспечивающего после выполнения короткого взлета/посадки горизонтальный полет в перегрузочном варианте, но и на входной вал ОЭМГ, работающего как электрогенератор с номинальной мощностью, так и на входной вал ОЭМГ, работающего как электрогенератор с максимальной мощностью при отключенном его выходном вале от главного редуктора соответственно.
| WO 2012030300 A1, 08.03.2012 | |||
| СПОСОБ РЕАЛИЗАЦИИ РЕЖИМА СВЕРХЗВУКОВОГО ОБТЕКАНИЯ НА ЛОПАСТИ ВОЗДУШНОГО НЕСУЩЕГО ВИНТА И АВИАЦИОННО-КОСМИЧЕСКАЯ СИСТЕМА С ОСНОВАННЫМ НА ЭТОМ СПОСОБЕ СООСНЫМ НЕСУЩИМ ВИНТОМ ИЗМЕНЯЕМОГО ДИАМЕТРА СО СВЕРХЗВУКОВЫМ ОБТЕКАНИЕМ ЛОПАСТЕЙ | 2004 |
|
RU2297949C2 |
| СПОСОБ ФУНКЦИОНАЛЬНОГО ПОДАВЛЕНИЯ ЛАЗЕРНЫХ СИСТЕМ ПОИСКА ПОГРУЖЕННЫХ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2388013C2 |
| ЦИСТЕРНА ДЛЯ СЖИЖЕННЫХ ГАЗОВ | 1992 |
|
RU2032848C1 |

