Изобретение относится к области авиации и может быть использовано в скоростных вертолетах, выполненных по одновинтовой схеме без рулевого винта.
Известна система компенсации реактивного момента несущего винта одновинтового вертолета, содержащая рулевой винт, профилированную килевую балку, установленную на конце хвостовой балки под углом к вертикальной плоскости симметрии фюзеляжа, устройство управления шагом рулевого винта, хвостовую балку с аэродинамическим профилем внешних обводов поперечных сечений, создающим под воздействием индуктивного потока воздуха от вращения лопастей несущего винта дополнительный момент силы, противодействующей реактивному моменту. Хвостовая балка выполнена с переменным профилем поперечного сечения и имеет винтообразную форму с плавным угловым поворотом профиля обвода поперечного сечения. Центры поворота профилей поперечных сечений вдоль хвостовой балки расположены на прямой, проходящей через центр радиуса закругления сечения в начале хвостовой балки. На хвосте аэродинамического профиля вдоль хвостовой балки установлен аэродинамический щиток с возможностью изменения угла наклона относительно хорды аэродинамического профиля сечения хвостовой балки (патент РФ №2245821).
Такая система обеспечивает частичную компенсацию реактивного момента несущего винта, повышение управляемости по рысканию одновинтового вертолета, увеличение высоты полетов вертолетов за счет использования вихревого индуктивного потока воздуха, но не исключает необходимости в использовании хвостового винта и не упрощает конструкцию одновинтового вертолета.
Известен также каскадно-стабилизированный вертолет, выполненный по одновинтовой схеме, причем роль рулевого винта выполняют стабилизаторы, расположенные вертикально в зоне вращения несущего винта. Стабилизаторы установлены на поперечной балке, которая установлена на конце хвостовой балки вертолета. При этом они имеют возможность поворачиваться вокруг продольной оси поперечной балки с помощью проводки управления и шарнира. Хвостовая балка имеет возможность менять свое положение относительно несущего винта с помощью проводка управления и другого шарнира. Поперечное сечение хвостовой балки выполнено в виде крыла. (патент РФ №2266237).
Известный вертолет не имеет хвостового винта, но на режиме косой обдувки будет вести себя не устойчиво при путевом управлении и потери мощности при этом будут значительно выше, чем у обычного вертолета с активной компенсацией реактивного момента. Особенно под влиянием экранного эффекта поверхности земли при около нулевой скорости полета, когда расстояние до земли будет небольшим относительно вертикальной высоты стабилизаторов, что нарушит циркуляцию воздушного потока вокруг стабилизаторов и может привести к возникновению «вихревого кольца», приводящего к «жесткой посадке» вертолета.
Технический результат предлагаемого изобретения заключается в упрощении конструкции, снижении массы вертолета и мощности двигателей для обеспечения надежного управления вертолетом без рулевого винта.
Поставленная задача решается, заменой подвижного рулевого винта пассивным компенсатором реактивного момента с решетчатыми поликрыльями, состоящими из комплекта аэродинамических стабилизаторов, расположенных вертикально в зоне вращения несущего винта с возможностью поворота при помощи проводки управления и продольных шарниров. Установленные на фюзеляже вертолета продольные шарниры, связывают его с поперечными крыльями и хвостовыми стабилизаторами, которые соединены между собой аэродинамической решеткой из пересекающихся вертикальных полос желобкового профиля, ориентированных вогнутой стороной навстречу вращению несущего винта вертолета, у которого педали путевого управления и рычаг шаг-газ связаны через проводку управления автоматической гидросистемы с фюзеляжными гидроцилиндрами и штоками подкосов поперечных крыльев.
Проведенный заявителем анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностями признаков, тождественными всем признакам заявленной системы компенсации реактивного момента несущего винта одновинтового вертолета, отсутствуют. Следовательно, заявленное техническое решение соответствует условию патентоспособности "новизна".
Результаты поиска известных решений в данной области техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками заявляемого технического решения, показали, что они не следуют явным образом из уровня техники. Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявляемого технического решения преобразований на достижение указанного технического результата.
Следовательно, заявляемое техническое решение соответствует условию патентоспособности "изобретательский уровень", так как в отличие от существующего прототипа, предлагаемая конструкция имеет два решетчатых крыла, закрепленных на продольных шарнирах, положение которых синхронизировано с педалями путевого управления и рычага шаг-газ, что играет существенную роль в решении поставленной задачи.
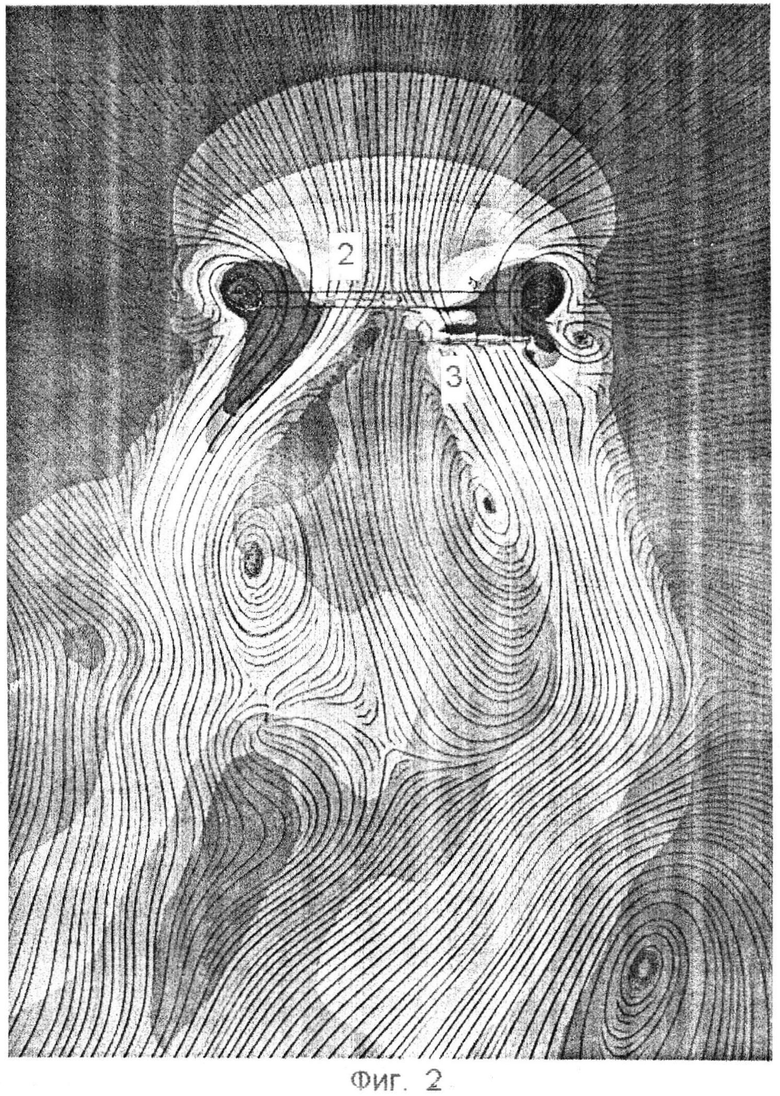
Сущность изобретения поясняется чертежами, где на Фиг. 1 показана горизонтальная проекция вертолета с предлагаемым компенсатором, на Фиг. 2 - вертикальный план поля скоростей и линий воздушного потока виртуальных испытаний его упрощенной математической модели.
Для улучшения летно-технических характеристик вертолета 1 предлагается новая конструкция компенсатора реактивного момента несущего винта 2 вертолета, выполненная по одновинтовой схеме без рулевого винта, роль которого выполняет пара аэродинамических решеток 3 и 4, расположенная между его поперечными крыльями 5, 6 и стабилизаторами 7, 8, установленными на конце хвостовой балки 9 перед вертикальным килем 10.
Аэродинамические решетки 3 и 4 установлены в зоне вращения несущего винта 2 с возможностью поворота на продольных шарнирах, пара которых 11 укреплена на фюзеляже вертолета 1, а вторая пара 12 - на конце хвостовой балки 9. Сами решетки собраны из пересекающихся вертикальных полос желобкового профиля 13, закрепленных внутри полукольцевых насадок 14 и ориентированных вогнутой стороной навстречу скорости вращения ω несущего винта вертолета, у которого педали путевого управления 15 и рычаг шаг-газ 16 связаны через проводку управления 17 автоматической гидросистемы 18 с фюзеляжными гидроцилиндрами 19 и шарнирно закрепленными штоками подкосов 20 поперечных крыльев 5 и 6 (на Фиг. 1 показаны пунктиром).
Компенсатор реактивного момента несущего винта одновинтового вертолета работает следующим образом. При управлении полетом одновинтового вертолета по курсу реактивный момент MR, действующий на фюзеляж 1 от вращающего момента Mнв несущего винта 2, уравновешивается моментами сил, развиваемых распределенной аэродинамической силой Pр от профилированной лентой 13 аэродинамических решеток 3 и 4 за счет циркуляционного обтекания их вертикальной компонентой воздушного потока, создающими на хвостовой балке 9 в направлении вращения ω лопастей несущего винта 2 моменты Mр1 и Mр2, соответственно, компенсирующие момент MR. При этом горизонтальная компонента воздушного потока создает лишь незначительную силу лобового сопротивления Pл на аэродинамических решетках 3 и 4, благодаря экранирующему действию тонкой ветровой тени поперечных крыльев 5, 6 и полукольцевых насадок 14.
Поскольку вертикальный размер желобковых полос 13 невелик и практически сопоставим с аналогичным размером самого несущего винта 2, то влиянием экранирующего эффекта земли и фюзеляжа можно смело пренебречь, поэтому аэродинамическое воздействие решеток 3 и 4 сводится к созданию противоположной закрутки воздушного потока несущего винта 2, а не «вихревого кольца» вокруг него. Этому способствует и первоначальная установка желобковых полос 13 так, что касательная к их верхней кромке направлена строго вертикально для обеспечения их максимального аэродинамического качества.
Поэтому их продольный наклон приводит к уменьшению горизонтальной площади решетчатых крыльев, аэродинамической силы Pр и соответствующему снижению компенсирующих моментов Mр1 и Mр2. В результате фюзеляж вертолета 1 совершает определенный поворот по курсу, который задается соответствующей длинной подкосов 20 идроцилидров 19, которые управляются автоматической гидросистемой 18 с проводкой управления 17 от рычага шаг-газ 16 и педалей путевого управления 15, как у обычного вертолета с рулевым винтом.
Предложенный пассивный, то есть без подвижных частей, компенсатор реактивного момента несущего винта одновинтового вертолета позволит обеспечить комфортабельность и безопасность полетов вертолетов при околонулевых скоростях, особенно вблизи земли, и значительно повысить его скорость и потолок до уровня, располагаемого несущим винтом и мощностью силовой установки.
Промышленная реализуемость и применимость предложенного компенсатора подтверждается компьютерными испытаниями его упрощенной математической модели Фиг. 2 (без учета фюзеляжа), в частности прилагаемой вертикальной проекцией поля скоростей и линий воздушного потока, которая наглядно демонстрируют отсутствие «вихревого кольца» и безвихревое распределение линий тока под аэродинамическими решетками 3 и 4 даже при полной компенсации реактивного момента несущего винта 2 вертолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНВЕРТОЛЕТ | 2008 |
|
RU2369525C2 |
| КОМБИНИРОВАННЫЙ ВЕРТОЛЕТ (ВАРИАНТЫ) | 2009 |
|
RU2397919C1 |
| СИСТЕМА КОМПЕНСАЦИИ РЕАКТИВНОГО МОМЕНТА НЕСУЩЕГО ВИНТА ОДНОВИНТОВОГО ВЕРТОЛЁТА | 2003 |
|
RU2245821C1 |
| ДВИЖИТЕЛЬНАЯ СИСТЕМА ВЫСОКОСКОРОСТНОГО ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2015 |
|
RU2629635C2 |
| МНОГОФУНКЦИОНАЛЬНОЕ ХВОСТОВОЕ ОПЕРЕНИЕ ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2000 |
|
RU2186711C2 |
| ВЕРТОЛЕТ И СПОСОБ УПРАВЛЕНИЯ ОДНОВИНТОВЫМ ВЕРТОЛЕТОМ | 2002 |
|
RU2238221C2 |
| Вертолёт двухроторный с аэродинамическими компенсаторами реактивного момента роторов | 2022 |
|
RU2784735C1 |
| Одновинтовой скоростной вертолёт | 2022 |
|
RU2770945C1 |
| КАСКАДНО-СТАБИЛИЗАТОРНЫЙ ВЕРТОЛЁТ | 2000 |
|
RU2266237C2 |
| СКОРОСТНОЙ СВЕРХМАНЕВРЕННЫЙ ВИНТОКРЫЛ | 2012 |
|
RU2480379C1 |
Изобретение относится к области авиации, в частности к конструкциям вертолетов, выполненных по одновинтовой схеме без рулевого винта. Компенсатор реактивного момента несущего винта выполнен в виде ряда аэродинамических стабилизаторов, расположенных вертикально в зоне вращения несущего винта и выполненных с возможностью поворота при помощи проводки управления и продольных шарниров. Установленные на фюзеляже вертолета продольные шарниры связывают компенсатор с поперечными крыльями и хвостовыми стабилизаторами, которые соединены между собой аэродинамической решеткой из пересекающихся вертикальных полос желобкового профиля, ориентированных вогнутой стороной навстречу вращению несущего винта вертолета. Педали путевого управления и рычаг шаг-газ связаны через проводку управления автоматической гидросистемы с корпусными гидроцилиндрами и штоками подкосов поперечных крыльев. Достигается снижение веса и вибрации конструкции вертолета, повышение надежности управления и более рациональное использование мощности двигателей на создание подъемной силы несущего винта. 1 з.п. ф-лы, 2 ил.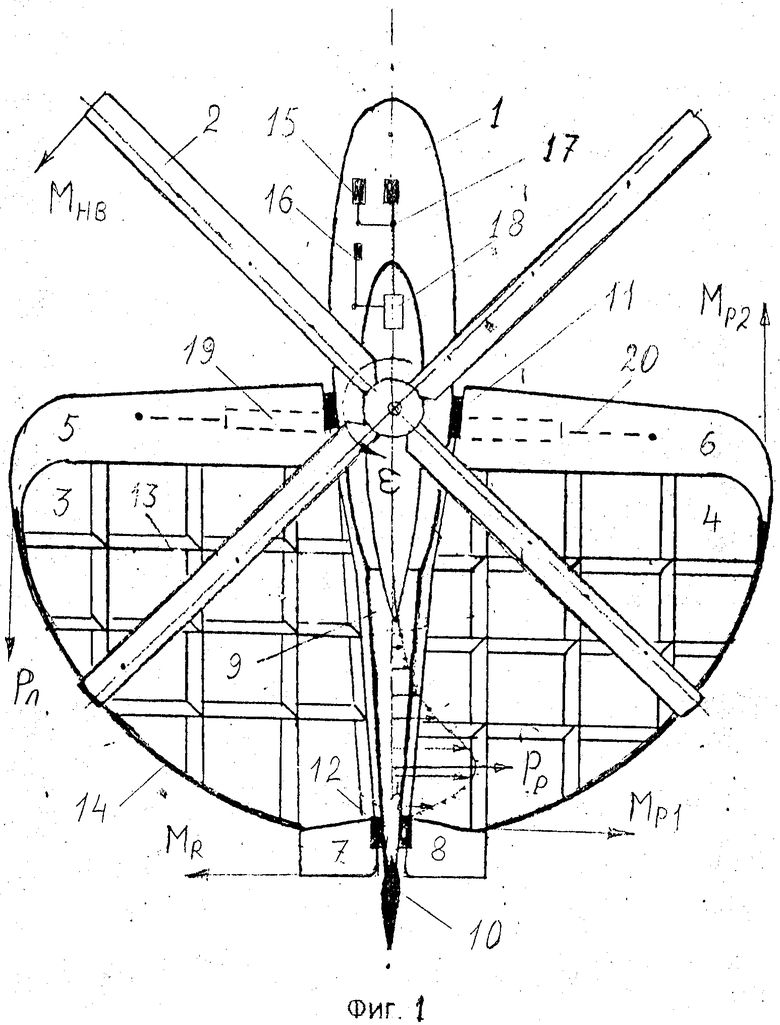
1. Компенсатор реактивного момента несущего винта одновинтового вертолета, в котором роль рулевого винта выполняет комплект аэродинамических стабилизаторов, расположенных вертикально в зоне вращения несущего винта с возможностью поворота при помощи проводки управления и крепежных шарниров, отличающийся тем, что продольные шарниры, установленные на фюзеляже вертолета, связывают его с поперечными крыльями и хвостовыми стабилизаторами, которые соединены между собой аэродинамической решеткой из пересекающихся вертикальных полос желобкового профиля, ориентированных вогнутой стороной навстречу вращению несущего винта вертолета, у которого педали путевого управления и рычаг шаг-газ связаны через проводку управления автоматической гидросистемы с гидроцилиндрами фюзеляжа и штоками подкосов поперечных крыльев.
2. Компенсатор по п.1, отличающийся тем, что касательная к верхней кромке полос желобкового профиля в аэродинамической решетке направлена вертикально.
| КАСКАДНО-СТАБИЛИЗАТОРНЫЙ ВЕРТОЛЁТ | 2000 |
|
RU2266237C2 |
| US 3902688 A, 02.09.1975 | |||
| US 6416015 B1, 09.07.2002 | |||
| US 3260582 A, 12.07.1966. | |||

