Предполагаемое изобретение относится к области промышленного машиностроения, связанной с созданием механизмов, при работе которых в режиме установившегося движения их начальное звено движется периодически неравномерно.
Для снижения степени отрицательного влияния этой неравномерности на характеристические параметры работы механизма применяется техническое решение, получившее надежное теоретическое обоснование [1] и широкую практику промышленного внедрения,- маховик. Неразъемно жестко связанный с начальным звеном механизма (часто являясь частью этого звена, при изготовлении с ним заодно, или выполняя его роль) маховик фактически является аккумулятором кинетической энергии, накапливая ее во время ускоренного движения начального звена (например, в режиме холостого хода механизма) и отдавая при замедлении (например, в режиме рабочего хода, при росте полезного сопротивления, преодоление которого является основной функцией механизма).
Наиболее удобной, по условиям конструирования и изготовления, геометрической формой маховика является сплошной диск с массивным ободом (из соображения экономии металла, центральную часть диска часто заменяют жесткими спицами, сохраняя неизменной форму обода). При таком исполнении соблюдается постоянство величины основной технической характеристики маховика - момента инерции, из-за чего при проектировании маховика приходится учитывать ограничения, накладываемые условиями эксплуатации на результаты расчета:
- заниженная в расчете величина момента инерции маховика способствует росту частотной характеристики неравномерного движения начального звена и увеличению инерционных нагрузок в механизме, что снижает его надежность:
- завышенная в расчете величина момента инерции маховика требует увеличения пускового момента электродвигателя, сообщающего движение начальному звену, что усложняет решение задачи оптимального энергообеспечения.
Предполагаемое изобретение решает задачу выполнения конструкции маховика с регулируемой величиной момента инерции в процессе работы механизма, чем обеспечивается возможность сужения диапазона изменения частотной характеристики периодически неравномерного движения начального звена механизма, при уменьшении потребного
пускового момента электродвигателя.
Согласно предлагаемому техническому решению эта задача решается тем, что массивный обод маховика является связующим звеном для полумуфт, размещенных на валах электродвигателя и начального звена механизма, образуя с ними кинематическую цепь, содержащую спицы и массивные ползуны; при этом ползуны, выполненные с возможностью перемещения в радиальных пазах обода; образуют с ним поступательные кинематические пары, а спицы образуют вращательные кинематические пары в соединениях с полумуфтами и ползунами.
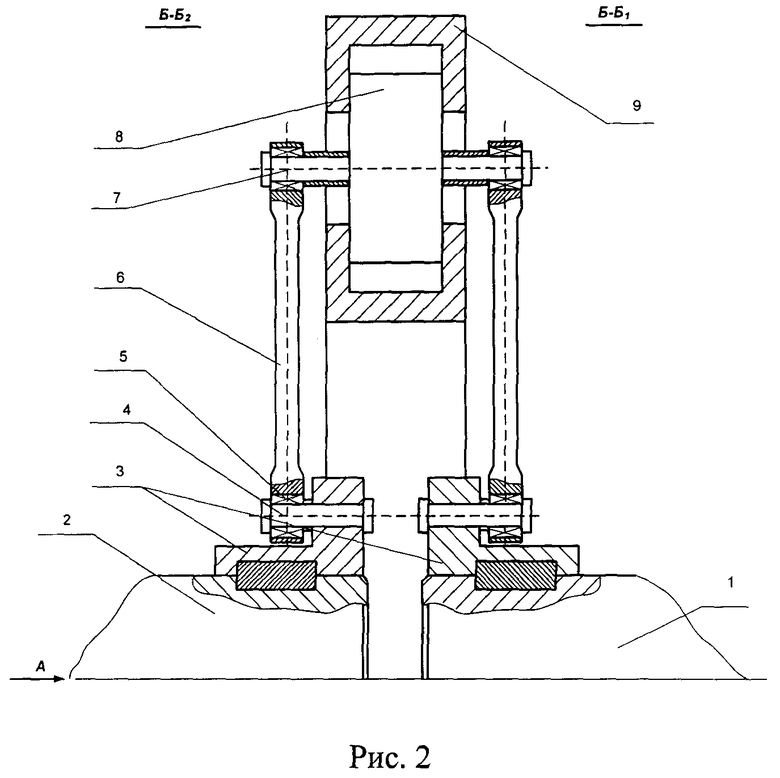
На рис. 1 и 2 представлен в общем виде один из вариантов конструкции, отвечающей предложенному техническому решению. Рис. 1 - вид на маховик вдоль оси валов (по стрелке А на рис. 2). Рис. 2 - совмещенный разрез Б-Б1 и Б-Б2 на рис. 1.
На валах 1, 2 электродвигателя и начального звена механизма укреплены полумуфты 3, с которыми посредством полуосей 4 и подшипников 5 неразъемно в процессе работы механизма соединены спицы 6, которые другими своими концами соединены с осями 7, жестко связанными с ползунами 8, выполненными с возможностью перемещения в направляющих радиальных пазов в корпусе обода 9 маховика. Движение всех точек конструкции происходит в плоскостях, перпендикулярных оси вращения валов 1, 2.
Возможность относительного движения звеньев в кинематических парах. 3-6, 6-8, 8-9 обеспечивает возможность регулирования величины момента инерции маховика в процессе работы.
В начальный момент времени, предшествующий запуску электродвигателя: - угол между парой спиц 6, соединенных с одной осью 7, - минимальный; - ползуны 8 находятся на максимальном удалении от оси вращения валов 1,2; - момент инерции маховика - максимальный.
При запуске двигателя: - угол между парой спиц увеличивается до максимального; - ползуны занимают положение на минимальном удалении от оси вращения валов; - момент инерции маховика - минимальный; - момент сил инерции маховика (момент сопротивления, определяющий потребную величину пускового момента электродвигателя) - минимальный.
При работе механизма в режиме установившегося движения, для которого определены расчетные характеристики неравномерности движения начального звена:
- ускорение движения начального звена (например, в режиме холостого хода механизма) приводит: - к уменьшению угла в паре спиц; - к удалению ползунов от оси вращения валов 1, 2; - к увеличению момента инерции маховика (момента сопротивления, препятствующего росту угловой скорости начального звена);
- замедление движения начального звена (например, в режиме рабочего хода) приводит: - к увеличению угла между спицами в каждой их паре, - к приближению ползунов к оси вращения валов 1, 2; - к уменьшению момента инерции маховика; - к уменьшению момента сил инерции маховика.
Плавность и синхронность движения ползунов в радиальных пазах обода обеспечивается легко поддающимися расчету потерями на трение в их кинематических парах, а также возможностью применения устройств контроля относительного положения звеньев. Как вариант, взаимодействие этих звеньев может быть осуществлено с применением несамотормозящейся винтовой пары, в виде их связи, или сопровождается выравниванием гидравлического давления в заполненных жидкостью сообщающихся полостях обода, образующихся между ободом и ползунами при их относительном движении.
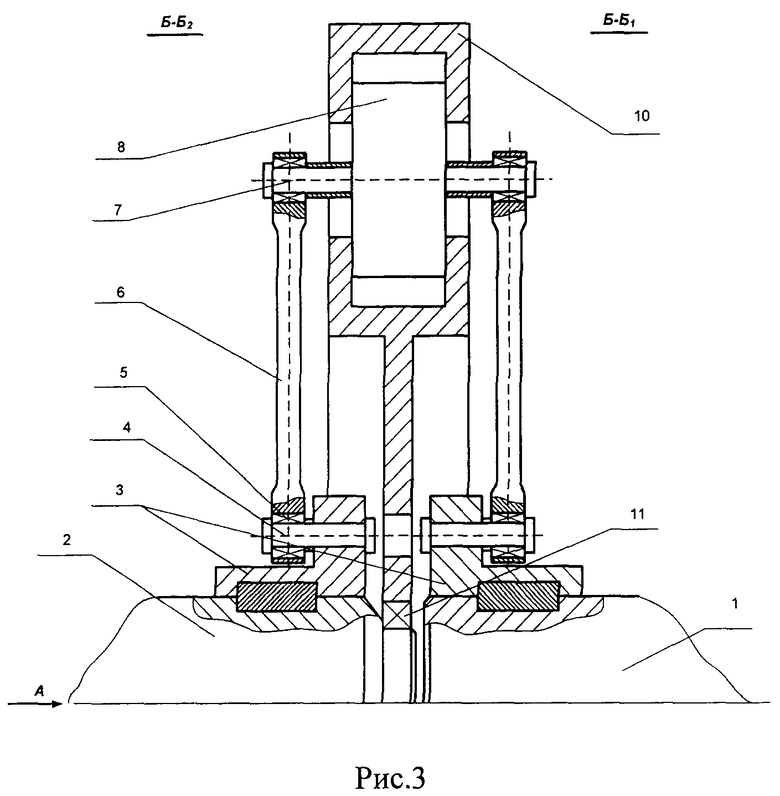
С целью предупреждения возможности возникновения биений обода относительно оси вращения валов (например, из-за нарушения балансировки) он может быть изготовлен в виде махового колеса (в форме сплошного диска или со спицами в центральной части), составляющего вращательную кинематическую пару с валом начального звена механизма, размещенную между полумуфтами. Этот вариант конструкции иллюстрирует рис. 3, где: - 10 - маховое колесо: - 11 - подшипник: - позиции 1 - 8 те же, что на рис 1, 2.
Техническим результатом предполагаемого изобретения является повышение надежности работы механизма, обусловленное возможностью выполнения оптимизационного расчета для приведения в соответствие хода ползунов с частотной характеристикой периодически неравномерного движения начального звена, чем обеспечивается оптимальное регулирование изменения величины момента инерции маховика в процессе работы механизма; а также возможностью оптимального энергообеспечения этой работы.
Информационные источники
1. Артоболевский И. И. Теория механизмов и машин./ «Наука». - М. 1988. С 640.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ МОМЕНТА ИНЕРЦИИ МАХОВИКА | 2015 |
|
RU2578443C1 |
| ИНЕРЦИОННЫЙ АВТОМАТИЧЕСКИЙ ИМПУЛЬСИВНЫЙ ВАРИАТОР | 2002 |
|
RU2212575C1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2013 |
|
RU2552403C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕКУПЕРАТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2001 |
|
RU2210849C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2012 |
|
RU2499934C2 |
| ШЕСТИЦИЛИНДРОВЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2014 |
|
RU2603878C2 |
| ТРЕХЦИЛИНДРОВОЕ УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2016 |
|
RU2672519C2 |
| ДЕСЯТИЦИЛИНДРОВЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2014 |
|
RU2604900C2 |
| ВОСЬМИЦИЛИНДРОВЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2014 |
|
RU2603045C2 |
| Регулирующее устройство | 1988 |
|
SU1610132A1 |
Изобретение относится к машиностроению. Маховик содержит массивный обод, являющийся связующим звеном для полумуфт, размещенных на валах электродвигателя и начального звена механизма. Массивные ползуны выполнены с возможностью перемещения в радиальных пазах обода и образуют с ним поступательные кинематические пары. Спицы образуют вращательные кинематические пары в соединениях с полумуфтами и ползунами. Достигаются регулирование величины момента инерции в процессе работы маховика и снижение величины пускового момента. 2 з.п. ф-лы, 3 ил.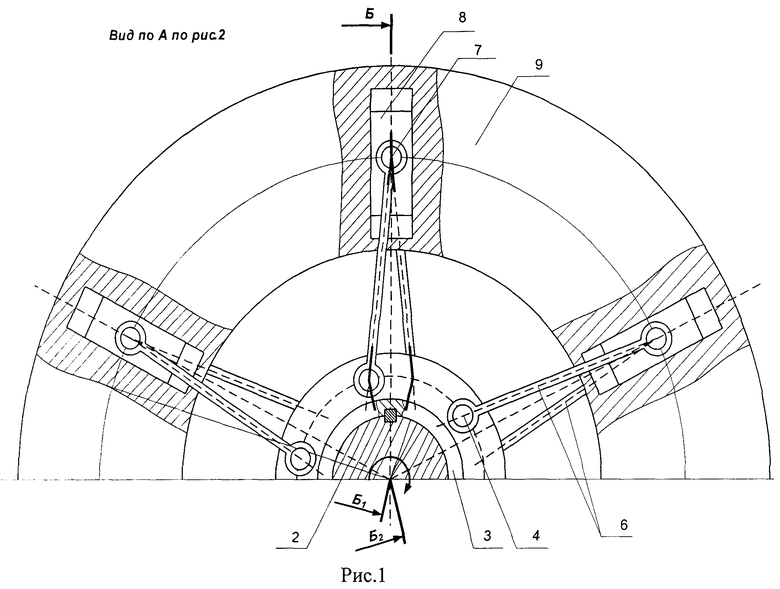
1. Маховик, составляющий неразъемное соединение с выполняющим периодически неравномерное движение начальным звеном механизма, с возможностью уменьшения степени отрицательного влияния этой неравномерности на технические характеристики механизма, отличающийся тем, что массивный обод является связующим звеном для полумуфт, размещенных на валах электродвигателя и начального звена механизма, образуя с ними кинематическую цепь, содержащую спицы и массивные ползуны; при этом ползуны, выполненные с возможностью перемещения в радиальных пазах обода, образуют с ним поступательные кинематические пары, а спицы образуют вращательные кинематические пары в соединениях с полумуфтами и ползунами.
2. Маховик по п.1, в котором взаимодействие ползунов с ободом осуществлено с применением несамотормозящейся винтовой пары, в виде их связи, или сопровождается выравниванием гидравлического давления в заполненных жидкостью сообщающихся полостях обода, образующихся между ободом и ползунами при их относительном движении.
3. Маховик по п.1 или 2, массивный обод которого является частью махового колеса, составляющего вращательную кинематическую пару с валом начального звена механизма, размещенную между полумуфтами.
| Артоболевский И.И | |||
| Теория механизмов и машин | |||
| - М.: Наука, 1988 | |||
| Упругоцентробежная муфта | 1980 |
|
SU889954A1 |
| US 5976020 A, 02.11.1999 | |||
| Вибрационная мешалка | 1975 |
|
SU598646A1 |

