Настоящее изобретение определяет согласно двум различным аспектам, соответственно, сенсорный элемент с датчиком акустической эмиссии для регистрации акустической эмиссии. Кроме того, изобретение относится к системе контроля, в частности к системе контроля коррозии, системе контроля подшипников или системе контроля машин.
Контроль состояния промышленных установок приобретает все большее значение. Далее применяется понятие «акустическая эмиссия». Этот иностранный термин вошел в употребление среди специалистов как точное обозначение для технологии, с помощью которой регистрируется корпусный шум, который возникает не при обратимых изменениях материала, а только при необратимых изменениях материала. Оценка корпусного шума в ультразвуковой области (акустическая эмиссия) признана в качестве инструмента для распознавания дефектов материала и процессов усталости материала. В ряде применений акустическая эмиссия предоставляет в распоряжение характеристические сигналы, которые позволяют сделать вывод о контролируемом процессе, например о контроле подшипников, контроле инструмента или распознавании коррозии. Один только сигнал акустической эмиссии часто не позволяет сделать вывод, который является в достаточной степени однозначным. Например, процессы нагрева, ввиду термического расширения, также генерируют акустическую эмиссию.
Датчиками для регистрации акустической эмиссии обычно являются изготовленные вручную пьезодатчики с широкополосной или резонансной характеристикой. Имеются системы измерений для общих лабораторных применений или для специальных применений, таких как контроль инструментов на металлообрабатывающих станках. Эти системы оценивают только сигнал акустической эмиссии. Чистая оценка зарегистрированных сигналов акустической эмиссии подвержена влиянию помеховых сигналов и предрасположена к неверным интерпретациям. Правда можно после передачи данных акустической эмиссии от датчика акустической эмиссии в вышестоящее устройство выполнять корреляцию с другими измеренными величинами (например, с помощью MATLAB на персональном компьютере). Необходимые для этого приборы являются, однако, сложными и дорогостоящими и не пригодны для интеграции в промышленную среду.
Задача настоящего изобретения заключается в том, чтобы в соответствии с двумя аспектами предоставить соответствующий сенсорный элемент с датчиком акустической эмиссии, с помощью которого выполнение задач измерения упрощается. Кроме того, задачей настоящего изобретения является предоставить систему контроля, в частности систему контроля коррозии, систему контроля подшипников или систему контроля машин, с помощью которой выполнение задач измерения упрощается.
В соответствии с изобретением эта задача решается согласно первому аспекту тем, что сенсорный элемент с датчиком акустической эмиссии для регистрации акустической эмиссии содержит второй датчик для второй измеряемой величины, которая отличается от акустической эмиссии. Тем самым с помощью только одного сенсорного конструктивного элемента экономичным образом можно предоставлять подготовленный (обогащенный) сенсорный вывод и по меньшей мере частично сэкономить затраты на дополнительный конструктивный элемент, затраты на монтаж и/или затраты на последующую подготовку исходных измеренных значений. Кроме того, надежным образом обеспечивается точное позиционирование второго датчика в отношении положения датчика акустической эмиссии.
Согласно второму аспекту эта задача решается тем, что соответствующий изобретению сенсорный элемент с датчиком акустической эмиссии для регистрации акустической эмиссии содержит интерфейс для приема внешнего сенсорного сигнала. Внешний сенсорный сигнал может, например, предоставляться от датчика числа оборотов или другого датчика, который, ввиду условий места измерений или на основе конструктивных причин, не может быть встроен в сенсорный элемент. Регистрация числа оборотов для оценки датчиков контроля состояния часто предпочтительна, так как качество диагностики может быть значительно улучшено посредством дополнительного показания дополняющего датчика. Кроме того, регистрация числа оборотов посредством синхронизации с периодическими величинами помех обеспечивает возможность улучшенного подавления этих величин помех.
В отношении системы контроля задача изобретения решается тем, что система контроля содержит соответствующий изобретению сенсорный элемент.
Формы выполнения предусматривают, что второй датчик является датчиком температуры для регистрации высоты температуры и/или градиента температуры, или что второй датчик является датчиком колебаний для регистрации характеристики колебаний, или что второй датчик является датчиком магнитного поля для регистрации напряженности магнитного поля и/или направления магнитного поля. Датчик колебаний может обозначаться также как датчик вибрации. Выбор датчиков может быть согласован с задачей контроля.
Для измерения напряженности магнитного поля и/или направления магнитного поля может, например, применяться 3D-датчик Холла. Тем самым возможна регистрация магнитного «отпечатка пальцев», который характерен для состояния машины. Возможны различные стратегии оценки: оценка собственного магнитного поля машины (например, двигателя) и/или определение числа оборотов из изменения магнитного поля вращающегося магнитного поля электродвигателя или электрического генератора. Также можно оценивать модуляцию магнитного поля (DC-магнитного поля), направление которого остается постоянным, чтобы определить положение ротора линейного двигателя посредством оценки шунтового изменения на упорах или при посадке ротора. При применении 3D-датчика магнитного поля ориентация датчика относительно магнитного поля некритична, так как может оцениваться вектор магнитного поля.
Предпочтительные дальнейшие развития сенсорного элемента включают в себя третий датчик для регистрации высоты температуры, характеристики колебания и/или напряженности магнитного поля и/или направления магнитного поля.
Также согласно первому аспекту сенсорный элемент может иметь интерфейс для приема внешнего сенсорного сигнала. Следующие отсюда преимущества уже были обсуждены.
Предпочтительно, если сенсорный элемент имеет устройство оценки для генерации консолидированного и/или сжатого сенсорного сигнала посредством оценки сенсорного сигнала датчика акустической эмиссии с учетом второго измеренного параметра и/или внешнего сенсорного сигнала. Датчик может иметь один или несколько алгоритмов для сигнального объединения измеряемых величин. Так, например, один алгоритм может включать простой контроль порогового значения или вычисление корреляции между двумя измеряемыми величинами. Алгоритмы могут быть предоставлены как блоки диагностики, которые могут активироваться и/или деактивироваться отдельно или совместно.
Особенно предпочтительно, если в устройство оценки может загружаться программный код и/или если в устройстве оценки может исполняться программный код. Тем самым специфические для применения алгоритмы оценки могут загружаться в сенсорный элемент отдельно или в комбинации друг с другом и там выполняться по выбору. Может быть предусмотрено, что программный код может загружаться в сенсорный элемент через другой или через тот же интерфейс как программный код.
Также является предпочтительным, если устройство оценки выполнено с возможностью осуществления корреляции между сигналами, которые зарегистрированы первым и вторым датчиком, и/или первым и третьим датчиком, и/или первым и четвертым датчиком, и/или парой с второго по четвертый датчики. Тем самым может быть повышена надежность выбранного сенсорным элементом показателя состояния.
Формы выполнения предусматривают, что устройство оценки выполнено с возможностью выполнения корреляции между внешним сенсорным сигналом и сенсорным сигналом первого, и/или второго, и/или третьего, и/или четвертого датчика. Также тем самым может быть повышена надежность выбранного сенсорным элементом показателя состояния.
Изобретение более подробно поясняется на основе приложенных чертежей, на которых показано следующее:
Фиг. 1 - блок схема сенсорного элемента,
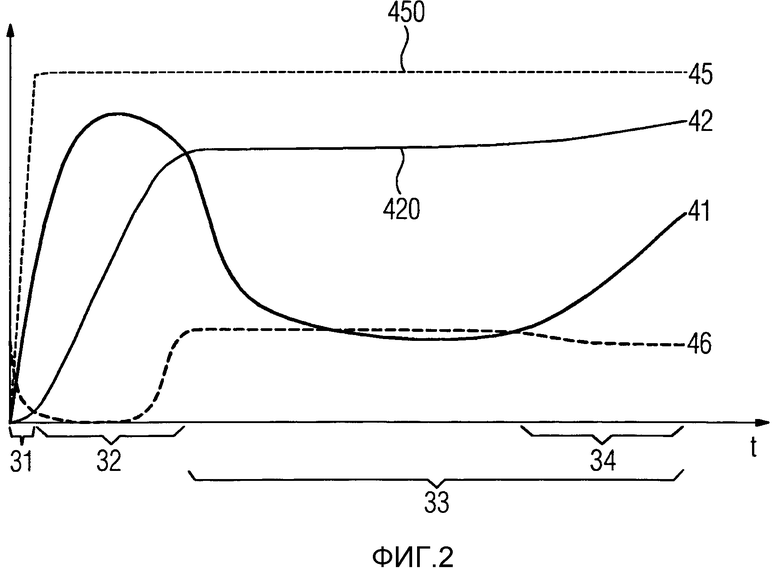
Фиг. 2 - представленная не в масштабе временная характеристика показателя правдоподобия в зависимости от различных также представленных переменных во времени измеряемых величин.
Охарактеризованные далее примеры выполнения представляют предпочтительные формы выполнения настоящего изобретения.
Показанная на фиг. 1 система 60 контроля для контроля объекта 18 контроля включает в себя вышестоящее устройство 26 контроля и подключенный к нему сенсорный элемент 10. Сенсорный элемент 10 включает в себя несколько датчиков 11, 12, 13, 14 для физически различных измеряемых величин, схему 20 регистрации данных, устройство 22 оценки для зарегистрированных измеренных значений 51, 52, 53, 54, 55 и интерфейс 24 для подключения вышестоящего устройства 26 контроля.
Первый датчик 11 является датчиком акустической эмиссии для генерации электрических сигналов в зависимости от интенсивности и/или направления зарегистрированной акустической эмиссии. Второй датчик 12 является датчиком температуры для генерации электрических сигналов в зависимости от зарегистрированной высоты температуры и/или интенсивности и/или направления температурного градиента. Третий датчик 13 является датчиком колебаний для генерации электрических сигналов в зависимости от интенсивности, частоты и/или направления зарегистрированных колебаний. Четвертый датчик 14 является датчиком магнитного поля для генерации электрических сигналов в зависимости от напряженности и/или направления зарегистрированного магнитного поля.
Опционально сенсорный элемент 10 также содержит интерфейс 28 для подачи сигналов 55 от одного или нескольких внешних датчиков 15. Независимо от этого сигналы 55 от внешнего датчика 16 также могут подаваться через тот интерфейс 24, который предусмотрен для подключения сенсорного элемента 10 к вышестоящему устройству 26 контроля. Одна форма выполнения, целесообразная для некоторых применений, предусматривает, что интерфейс 24, 28 для внешнего датчика 15, 16 выполнен с возможностью подачи сигнала 55 числа оборотов от датчика 15, 16 числа оборотов и/или сигнала 55 тока в подшипниках от датчика 15, 16 тока в подшипниках.
На основе фиг. 2 на примере диагностики подшипников поясняется, каким образом посредством сенсорного элемента из измеренных значений 51, 52, 53, 54, 55 нескольких физически различных измеряемых величин может быть сформирован показатель 46 достоверности (правдоподобия), который используется в качестве меры для применимости и/или действительности зарегистрированной активности 41 акустической эмиссии. В примере предполагается, что подшипник 18 в фазе 33 нормального режима работы работает с почти постоянным числом 450 оборотов нормального режима работы. В начале приведения в действие подшипника 18 сначала имеет место фаза 31 разгона, в которой число 42 оборотов повышается до числа 450 оборотов нормального режима работы. К фазе 31 разгона примыкает фаза 32 нагрева, в которой, хотя число 450 оборотов нормального режима работы уже достигнуто, подшипник 18 только постепенно нагревается до температуры 420 нормального режима работы. Фаза приведения в действие включает в себя, таким образом, фазу 31 разгона и фазу 32 нагрева, которые частично перекрываются во времени. Во время фазы 31, 32 приведения в действие не выполняется никакой диагностики подшипников. В фазе 33 нормального режима работы после фазы 31, 32 приведения в действие число 42 оборотов является почти постоянным. Поэтому температурные изменения в фазе 31, 32 приведения в действие обусловлены не изменениями числа оборотов. Во время квазистационарного состояния фазы 33 нормального режима работы может выполняться диагностика подшипников, которая приводит к достоверным результатам. В примере к концу 34 фазы 33 нормального режима работы наблюдается сильное повышение акустической эмиссии 41 и повышение от слабого до сильного температуры 42. Из одновременного возникновения сильного повышения акустической эмиссии 41 во взаимосвязи с ощутимым ростом температуры можно сделать вывод о возрастающем износе подшипника. Это может в сенсорном элементе 10 использоваться для того, чтобы своевременно формировать предупредительный сигнал (с соответствующим показателем состояния) для ввода мероприятий по техническому обслуживанию.
Сенсорный элемент 10 является легко параметризируемым, чтобы реализовать настройку способа оценки на конкретные применения или контролируемые объекты 18 (как, например, насосы, подшипники, редукторы, вентиляторы, компрессоры). Для этого устанавливаются соответствующие данные 52, 53, 54, 55 для объединения с сигналом 51 акустической эмиссии, соответствующий способ объединения, а также правила оценки и/или веса оценки. Далее поясняются различные подобные специфические для применения способы.
Пример распознавания кавитации в насосах: Целесообразным является объединение распознавания акустической эмиссии и распознавания температуры, так как кавитация сильно зависит от температуры. Для локализации источника кавитации необходима синхронизация с числом 45 оборотов насоса. Для этого может быть предусмотрен внешний вход 28 числа оборотов, сетевой сигнал (например, РТР-сообщения) или оценка датчика 14 магнитного поля сенсорного элемента 10 (РТР= протокол точного времени). Сигнал 53 датчика 13 колебаний сенсорного элемента 10 представляет собой указатель для величины повреждения. При высокой интенсивности этого дополнительного сигнала 53 повышается достоверность сигнала 51 акустической эмиссии, которая обосновывает то, что насос 18 должен быть отключен. Такая достоверность (как правдоподобие) может использоваться в качестве дополнительной информации для показателя состояния насоса 18.
Пример диагностики подшипников: В подшипниках акустическая эмиссия возникает в высоком диапазоне частот в течение фазы 31 разгона, на основе термического расширения компонентов 18 машины. Это, при отдельном рассмотрении, действует как кажущееся сильное повреждение подшипников. Но фактически речь идет не о действительном сигнале повреждения, а о релаксации материала при расширении из-за нагрева. Рациональная оценка акустической эмиссии для ответа на вопрос, имеет ли место дефектность или повреждение подшипников, возможна только в термически стабильном состоянии. Распознавание и контроль процесса нагрева посредством дополнительного датчика 12 температуры является рациональным, чтобы избежать быстрого разгона в холодном состоянии. Слишком сильное нагревание приводит к уменьшению зазора подшипника (люфта подшипника) и к «заеданию» подшипника 18. За счет объединения регистрации температуры и регистрации акустической эмиссии можно также сделать выводы о вязкости смазочного материала и о типе трения.
Пример подшипниковых токов в подшипниках двигателя: Подшипниковые токи проявляются также через акустическую эмиссию 41. Акустическая эмиссия обычно коррелируется с колебанием двигателя, так как разгрузка в подшипнике 18 всегда возникает при особенно высоких амплитудах колебаний (при которых зазор подшипника сужается до минимума). Также датчик 14 магнитного поля может вырабатывать сигналы при событиях подшипниковых токов. С помощью соответствующего изобретению сенсорного элемента 10 возможна классификация вида токов в подшипниках:
- Акустическая эмиссия 41 и повышение температуры являются признаком омического тока в подшипниках или тока в подшипниках, вызванного электроискровой эрозией.
- Пробои токов в подшипниках из-за электроискровой эрозии возникают чаще всего при низкочастотных колебаниях установки. При этом толщина смазочного зазора модулируется, и при событиях тока в подшипниках возникает акустическая эмиссия 41 и импульсы магнитного поля. Возникающее повреждение (образование рифлей во внешнем кольце и последующая полигонизация внутреннего кольца) может распознаваться с помощью низкочастотного датчика 13 колебаний.
Посредством совместной оценки данных 51 акустической эмиссии, данных 52 температуры и данных 53 колебаний (возможно, также данных 54 магнитного поля и данных 55 числа оборотов, последнее, например, посредством измерения магнитного поля) в устройстве 22 оценки может отслеживаться процесс повреждения токами в подшипниках и состояния объекта 18 контроля. Альтернативно или дополнительно к данным 55 числа оборотов в совместной оценке в качестве внешнего сигнала 55 данных могут также использоваться данные от внешнего устройства 15, 16 контроля тока в подшипниках.
Предпочтительным образом сенсорный элемент 10 содержит цифровой интерфейс 24. Является предпочтительным, если интерфейс 24 поддерживает стандарт интерфейса для проводного или для беспроводного соединения передачи данных (например, Ethernet-стандарт, такой как Fast-Ethernet-Physik, CAN-стандарт, WLAN-стандарт и/или Bluetooth). Также является рациональным, если через цифровой интерфейс 24, наряду с коммуникацией с инфраструктурой 26 контроля состояния, может выполняться также настройка на конкретное применение. При этом через цифровой интерфейс 24 могут передаваться сигналы с или без временной метки. Передача сигналов с временной меткой обеспечивает возможность синхронизации с другими элементами системы. В качестве другой возможной дополнительной пользы можно независимо от этого посредством временных меток и нескольких датчиков (например, на головке насоса) выполнять локализацию источников сигналов посредством амплитудного метода или метода на основе времени распространения.
Может быть предусмотрено, что в нормальном режиме параметры передаются или внутренним образом сохраняются. Сохранение может осуществляться в кольцевом буфере. Дальнейшее развитие может предусматривать, что создается гистограмма со сжатием самых старых значений.
При возникновении событий повреждения может предусматриваться анализ деталей. Для этого может передаваться выполненный с высоким разрешением «моментальный снимок» измеряемых данных 51, 52, 53, 54, 55. При этом может применяться сжатие данных.
Соответствующий изобретению сенсорный элемент 10 может отличаться от известных сенсорных элементов одним или более из следующих признаков:
- Объединение сенсорики для акустической эмиссии с дополнительными величинами поддерживается в сенсорном конструктивном элементе 10 (в интегрированном сенсорном конструктивном элементе), причем дополнительными величинами являются, например, колебание, температура 42 и/или магнитное поле.
- Сенсорный элемент 10 обладает интегрированной адаптируемой алгоритмикой для объединения измеряемых величин и для получения дополнительных информаций (например, информации 45 о числе оборотов из изменения магнитного поля).
- Посредством контроля достоверности контролируемых состояний 51, 52, 53, 54, 55 определяется вероятность 46 соответствия консолидированных показателей состояния и выбирается один из нескольких возможных показателей состояния в качестве результата и через интерфейс 24 предоставляется вышестоящему устройству 26 контроля в качестве сенсорного вывода сенсорного элемента 10.
Соответствующий сенсорный элемент 10 по сравнению с известными сенсорными элементами имеет одно или более из следующих преимуществ:
- Возможна простая адаптация сенсорного элемента 10 (интегрированной измерительной системы) к различным задачам измерений.
- Интегрированный датчик 14 магнитного поля обеспечивает возможность определения числа оборотов из магнитного поля - для этого не требуется никакая коммуникация с инвертором.
- Сенсорный элемент 10 может переоснащаться с незначительными затратами, и его затраты на инсталляцию незначительны.
- Посредством объединения с другими измеряемыми величинами возможна проверка достоверности сигналов 51 акустической эмиссии. Сенсорный элемент 10 является устойчивым по отношению к ложной интерпретации сигналов 51 акустической эмиссии.
- Выход данных ввиду локального объединения данных различных физических величин 41, 42, 45 в сенсорном элементе 10 (в интегрированном сенсорном элементе) снижается.
- Затраты на монтаж снижаются, за счет чего также улучшается надежность системы 60 контроля.
- Системные затраты на интеграцию и многократное использование подсистем (коммуникационные интерфейсы, микропроцессоры…) снижаются.
- Адаптивность сенсорного элемента 10 снижает многообразие типов и деталей и обеспечивает высокие объемы партий.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
10 сенсорный элемент
11 датчик корпусного шума
12 датчик температуры
13 датчик колебаний
14 датчик магнитного поля
15 внешний датчик; датчик числа оборотов
16 внешний датчик; датчик числа оборотов
18 объект контроля
20 схема регистрации данных
22 устройство оценки
24 интерфейс для сенсорного элемента
26 вышестоящее устройство контроля
28 интерфейс для внешних датчиков
31 фаза разгона
32 фаза нагрева
33 фаза нормального режима работа
34 конец фазы нормального режима работа
41 акустическая эмиссия
42 температура
45 число оборотов
46 достоверность
51 сигнал акустической эмиссии
52 данные температуры
53 данные колебаний
54 данные магнитного поля
55 внешний сенсорный сигнал; данные числа оборотов
60 система контроля
420 температура нормального режима работа
450 число оборотов нормального режима работа
t время.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| УСТРОЙСТВО И СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2022 |
|
RU2784140C1 |
| СПОСОБ АКУСТИЧЕСКОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ПРОТЯЖЕННЫХ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2825120C1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697008C1 |
| Способ диагностирования электрической изоляции в процессе дистанционного компьютерного мониторинга технологического оборудования | 2018 |
|
RU2709604C1 |
| УСТРОЙСТВО ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697007C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ СЧЁТЧИК ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ СТАТИЧЕСКИЙ | 2018 |
|
RU2695451C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ОПТИМИЗАЦИИ ПРОЦЕССОВ ЛИТЬЯ ПОД ДАВЛЕНИЕМ | 2011 |
|
RU2597926C2 |
| СТРЕЛОЧНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2477695C1 |
| СПОСОБ ОПЕРАТИВНОГО ОПРЕДЕЛЕНИЯ КАЧЕСТВА МИКРОСТРУКТУРЫ ТИТАНОВОГО СПЛАВА УПРУГОГО ЭЛЕМЕНТА | 2013 |
|
RU2525320C1 |
Использование: для регистрации сигналов акустической эмиссии. Сущность изобретения заключается в том, что сенсорный элемент для контроля системы с датчиком акустической эмиссии для регистрации акустической эмиссии содержит второй датчик для регистрации высоты температуры и/или градиента температуры и устройство оценки для формирования консолидированного и/или сжатого сенсорного сигнала посредством оценки сенсорного сигнала датчика акустической эмиссии с учетом второй измеряемой величины, причем формирование консолидированного и/или сжатого сенсорного сигнала в фазе нормального режима работы контролируемой системы осуществляется после фазы приведения в действие контролируемой системы. Технический результат: повышение качества диагностики объекта. 2 н. и 6 з.п. ф-лы, 2 ил.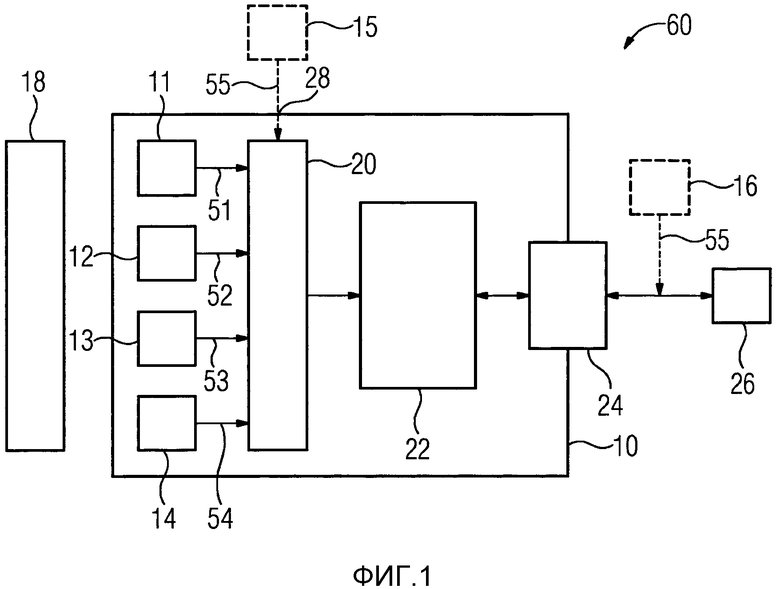
1. Сенсорный элемент (10) для контроля системы с датчиком (11) акустической эмиссии для регистрации акустической эмиссии (41), со вторым датчиком (12) для регистрации высоты (42) температуры и/или градиента температуры и устройством (22) оценки для формирования консолидированного и/или сжатого сенсорного сигнала посредством оценки сенсорного сигнала (51) датчика (11) акустической эмиссии с учетом второй измеряемой величины (52), причем формирование консолидированного и/или сжатого сенсорного сигнала в фазе (33) нормального режима работы контролируемой системы осуществляется после фазы (31, 32) приведения в действие контролируемой системы.
2. Сенсорный элемент (10) по п. 1, отличающийся третьим датчиком (12, 13, 14) для регистрации высоты (42) температуры, характеристики колебания и/или напряженности магнитного поля и/или направления магнитного поля.
3. Сенсорный элемент (10) по любому из пп. 1 или 2, отличающийся интерфейсом (28) для приема внешнего сигнала (55) датчика.
4. Сенсорный элемент (10) по п. 1, отличающийся тем, устройство (22) оценки выполнено с возможностью формирования консолидированного и/или сжатого сенсорного сигнала посредством оценки сенсорного сигнала (51) датчика (11) акустической эмиссии с учетом внешнего сенсорного сигнала (55).
5. Сенсорный элемент (10) по п. 4, отличающийся устройством (22) оценки, в которое может загружаться программный код и/или в котором может выполняться программный код.
6. Сенсорный элемент (10) по п. 4, отличающийся тем, что устройство (22) оценки выполнено с возможностью осуществления корреляции между сигналами (51, 52, 53, 54), которые зарегистрированы первым (11) и вторым (12) датчиком, и/или первым (11) и третьим (13) датчиком, и/или первым (11) и четвертым (14) датчиком, и/или парой с второго (12) по четвертый (13) датчик.
7. Сенсорный элемент (10) по п. 4, отличающийся тем, что устройство (22) оценки выполнено с возможностью выполнения корреляции между внешним сенсорным сигналом (55) и сенсорным сигналом (51) первого (11) и/или второго (12), и/или третьего (13), и/или четвертого (14) датчика.
8. Система (60) контроля, в особенности система контроля коррозии, система контроля подшипников или система контроля машин, отличающаяся сенсорным элементом (10) по любому из пп. 1-7.
| Способ управления процессом бурения | 1988 |
|
SU1548419A1 |
| JPH 08159151A, 18.06.1996 | |||
| US 20050286823A1, 29.12.2005 | |||
| Способ диагностики повреждаемости элементов конструкций | 1985 |
|
SU1330549A1 |
| Устройство для определения качества материалов | 1988 |
|
SU1589199A2 |
| Способ определения остаточных напряжений в изделиях | 1984 |
|
SU1180707A1 |

