Область техники, к которой относится изобретение
Изобретение относится к контрольно-измерительной технике, а также контролю и регулированию дорожного движения. Более конкретно изобретение относится к способу определения и фиксации нарушений правил дорожного движения и правил парковки транспортных средств. Предложенный способ обеспечивает контроль соблюдения правил дорожного движения, в частности требований дорожных знаков, правил остановки, стоянки и платной парковки в городских условиях.
Уровень техники
Известен способ определения скорости движения и координат транспортных средств с последующей их идентификацией и автоматической регистрацией нарушений правил дорожного движения (патент РФ №2382416, МПК G08G 1/052, 1/017, G07C5/08, опубл. 20.02.2010 г.). Данный способ включает излучение в направлении движущихся по участку дорожного полотна ТС импульсов электромагнитного излучения, прием импульсов отраженного электромагнитного излучения, скорости движения ТС путем сравнения параметров излученных и принятых импульсов и сравнение измеренной скорости ТС с максимально разрешенной на данном участке с последующими формированием, в случае регистрации превышения скорости, сигнала для распознавания государственного регистрационного знака нарушающего ТС с помощью видеокамеры распознавания государственного регистрационного знака, идентификацией ТС и автоматической регистрацией нарушений скоростного режима, импульсы радиолокатора излучают синхронно с видеосъемкой того же участка дорожного полотна видеокамерой панорамного обзора, вычисляют координаты и скорости транспортных средств, находящихся в кадре, после чего сравнивают получаемые независимо друг от друга посредством радиолокатора и видеокамеры панорамного обзора потоки данных, содержащие значения скоростей и координат всех ТС, находящихся в текущий момент на выбранном участке дорожного полотна, причем для получения метрологически достоверных данных о скоростях и координатах ТС используют данные радиолокатора, а за достоверные данные о координатах тех же ТС принимают данные, полученные от видеокамеры панорамного обзора, каждому ТС, нарушающему скоростной режим, обеспечивают дальнейшее сопровождение до момента распознавания государственного регистрационного знака, затем видеокамерой распознавания государственного регистрационного знака формируют кадр изображения ТС-нарушителя с распознанным государственным регистрационным знаком, датой, временем, зафиксированной скоростью и идентификатором видеокамеры, что позволяет осуществлять автоматическую регистрацию нарушений правил дорожного движения.
Недостатком описанного выше способа является то, что он требует использования отдельной аппаратуры для измерения скорости и распознавания номерного знака. Это усложняет и удорожает систему, а также повышает вероятность получения ошибочных данных. Кроме того, данный способ применим только для нарушений ПДД, связанных с превышением скорости. Подобными недостатками обладает также способ, описанный в патенте РФ №2488171, МПК G08G 1/017, 1/052, опубл. 20.07.2013 г.).
Известен способ контроля транспортных средств в пределах городской парковочной зоны (патент US 8682036, МПК G06K 9/00; G08G 1/017, опубл. 25.03.2014 г.), в котором используют одну видеокамеру для отслеживания, а другую - для идентификации транспортного средства потенциального нарушителя.
Известны также способы контроля нарушений правил парковки транспортных средств с помощью фото- и видеокамер (см. патент KR 100867336, МПК G08C 17/00, G08C 19/00, G08G 1/01, опубл. 10.11.2008 г., заявка KR 20040093575, МПК G08G 1/017, опубл. 06.11.2004 г., заявка KR 20060128157, MПK G08G 1/04, опубл. 14.12.2006 г., заявка ЕР 1895486, МПК G07B 15/02; G08G 1/017; G08G 1/14, опубл. 05.03.2008 г.). Все эти способы характеризуются ограниченной функциональностью и небольшой областью контроля.
В качестве аналогов можно также рассматривать патент РФ на полезную модель №136616 (МПК G08G 1/02, опубл. 10.01.2014 г.), в котором описана система видеонаблюдения, предназначенная для обнаружения нарушителей правил дорожного движения, в частности для обнаружения и видеофиксации транспортных средств, нарушающих правила стоянки, остановки и парковки. Система содержит поворотную видеокамеру, программно-аппаратные средства, которые позволяют осуществить распознавание автомобильных номеров, запоминание координат автомобилей и времени распознавания. Реализация аналогичного решения предлагается на сайте . Недостатком указанных систем является их способность определять и фиксировать нарушения только одного вида, что делает их использование эффективным только в небольших зонах с однотипными ограничениями для ТС.
Наиболее близким аналогом является способ регистрации нарушений правил дорожного движения (патент РФ №2419884, МПК G08G 1/052, опубл. 27.05.2011 г.), в котором на пути движения ТС размещают видеокамеру и фиксируют видеокадры с изображением пластины государственного регистрационного знака 7 (ГРЗ) ТС при перемещении его в зоне контроля видеокамеры, при этом предварительно измеряют параметры расположения видеокамеры относительно плоскости дороги, запоминают видеокадры, полученные в начале и в конце зоны контроля видеокамеры, определяют временной интервал между первым и последним видеокадрами, измеряют координаты точек углов и центра пластины ГРЗ в системе координат видеокадра в начале и в конце зоны контроля, преобразуют координаты точек углов и центра пластины ГРЗ из системы координат видеокадров в систему координат дороги с учетом параметров расположения видеокамеры относительно плоскости дороги, определяют направление перемещения пластины ГРЗ в системе координат дороги по координатам точек центра пластины ГРЗ в начале и в конце зоны контроля, корректируют размеры видимого изображения пластины ГРЗ на видеокадрах с учетом направления перемещения пластины ГРЗ, сравнивают скорректированные размеры пластины ГРЗ со стандартными значениями размеров пластины ГРЗ и по результатам сравнения определяют высоту, на которой перемещается точка центра пластины ГРЗ относительно плоскости дороги, преобразуют координаты точек углов и центра пластины ГРЗ из системы координат видеокадра в систему координат дороги в плоскости, параллельной плоскости дороги и расположенной на высоте перемещения точки центра пластины ГРЗ, определяют величину перемещения точки центра пластины ГРЗ в указанной плоскости, по найденной величине перемещения точки центра пластины ГРЗ и времени, за которое было совершено это перемещение, соответствующему временному интервалу между первым и последним видеокадрами, определяют скорость ТС.
Данный способ направлен на регистрацию нарушений, связанных с превышением скорости движения транспортных средств, его использование в условиях города нецелесообразно, а фиксация нарушений, связанных, например, с правилами остановки, стоянки и парковки автомобилей невозможна.
Задачей настоящего изобретения является создание способа определения и фиксации нарушений правил дорожного движения и правил парковки транспортных средств, который обладает широкой функциональностью и предоставляет достоверную информацию о нарушениях различных типов с привязкой к географическим координатам транспортных средств.
Раскрытие изобретения
Настоящее изобретение направлено на устранение недостатков, присущих аналогам. Техническими результатами, на достижение которых направлено изобретение, являются:
- создание способа определения и фиксации нарушений правил дорожного движения и правил парковки транспортных средств, обеспечивающего привязку каждого выявленного нарушения к географическим координатам транспортных средств,
- повышение точности и достоверности данных о нарушениях правил дорожного движения и правил парковки транспортных средств, полученных с помощью стационарно закрепленной поворотной видеокамеры,
- расширение спектра нарушений, фиксируемых с помощью стационарно закрепленной поворотной видеокамеры.
Применение данного способа позволяет идентифицировать транспортное средство, определить и зафиксировать нарушение с его участием при помощи всего одной поворотной видеокамеры. Такой подход позволяет исключить ошибки, возникающие в случаях, когда измерения и идентификацию ТС производят разными устройствами, вследствие чего полученные данные могут относиться к разным транспортным средствам, попавшим в зону контроля.
В соответствии с одним вариантом осуществления изобретения указанные технические результаты достигаются тем, что в способе определения и фиксации нарушений правил дорожного движения и правил парковки транспортных средств при помощи видеокамеры осуществляют сканирование зоны контроля, на полученных видеокадрах выявляют и распознают государственные регистрационные знаки (ГРЗ) транспортных средств (ТС), определяют точное время и географические координаты фиксации каждого транспортного средства, сопоставляют полученную информацию о транспортных средствах с информацией о действующих в данной зоне ограничениях и правилах для транспортных средств, формируют и передают информацию о выявленных нарушениях, при этом для определения географических координат транспортных средств предварительно осуществляют калибровку видеокамеры для определения фактических размеров ее матрицы путем размещения калиброванной пластины ГРЗ на заданном расстоянии от видеокамеры, определяют фактические размеры матрицы видеокамеры с учетом фокусного расстояния ее объектива, размеров калиброванной пластины ГРЗ и заданного расстояния от калиброванной пластины ГРЗ до видеокамеры, на полученном в результате сканирования зоны контроля видеокадре производят распознавание символов ГРЗ ТС, по которым определяют тип пластины ГРЗ, измеряют координаты точек вершин углов изображения пластины ГРЗ в системе координат видеокадра, определяют геометрические размеры изображения пластины ГРЗ на видеокадре в пикселях, определяют соотношение ширины и высоты изображения пластины ГРЗ на видеокадре, а также значения углов, сравнивают эти значения с эталонными для данного типа распознанной пластины ГРЗ и по результатам сравнений вычисляют коэффициент сужения пластины ГРЗ, с учетом которого корректируют измеренную ширину изображения пластины ГРЗ на видеокадре, затем по величине фокусного расстояния объектива видеокамеры, ширины матрицы видеокамеры и скорректированной ширины изображения пластины ГРЗ определяют расстояние от видеокамеры до центра пластины ГРЗ ТС, затем рассчитывают расстояние от точки проекции видеокамеры на дорогу до точки проекции центра пластины ГРЗ на дорогу по предварительно измеренному значению высоты подвеса видеокамеры над дорогой и известному расстоянию от видеокамеры до центра пластины ГРЗ, при этом, из значения высоты подвеса видеокамеры вычитают высоту подвеса пластины ГРЗ на транспортном средстве, после этого рассчитывают географические координаты ТС с учетом известных географических координат видеокамеры, предварительно измеренного угла отклонения видеокамеры от начального направления и известного расстояния от точки проекции видеокамеры на дорогу до точки проекции центра пластины ГРЗ ТС на дорогу.
В данном способе принимается, что высота подвеса пластины ГРЗ на транспортном средстве может составлять от 20 до 100 см. В большинстве случаев высоту подвеса пластины ГРЗ на транспортном средстве принимают равной 40 см.
Сканирование зоны контроля осуществляют при помощи поворотной видеокамеры, которую заранее настраивают и калибруют по заданным точкам в пространстве. Географические координаты ТС определяют для каждого видеокадра, на котором зафиксировано ГРЗ данного ТС. Сканирование зоны контроля может также осуществляться одновременно двумя или более видеокамерами.
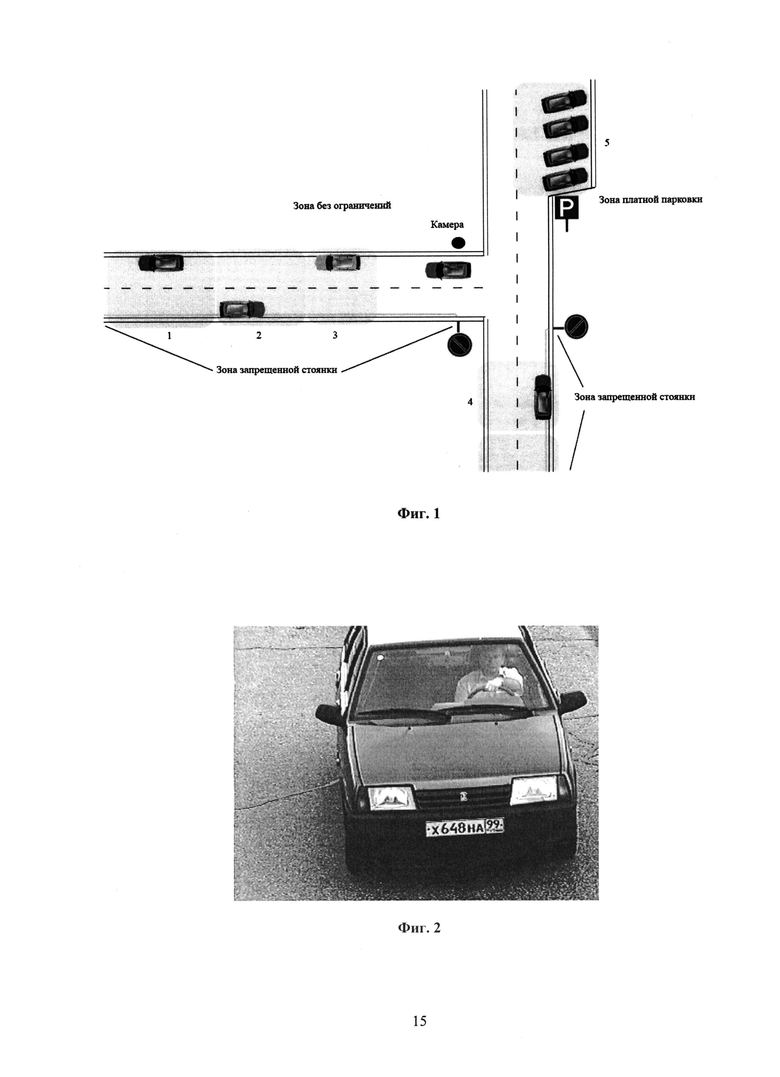
Поворотную видеокамеру закрепляют неподвижно сверху над зоной контроля. Зона контроля может охватывать дорожное полотно, зоны парковки и стоянки автотранспорта, а также другие участки, в пределах которых действуют какие-либо ограничения и правила для автотранспорта (см. Фиг. 1).
Благодаря определению точных географических координат при каждой фиксации идентифицированного в зоне контроля транспортного средства заявленный способ позволяет не только определять, находится ли транспортное средство в движении или нет, но также перемещения ТС в пределах зоны контроля видеокамеры. Такая информация может быть важной в случаях, когда транспортное средство, например, переместилось из зоны запрещенной стоянки или остановки в зону, где отсутствуют данные ограничения и наоборот и др.
В соответствии с другим вариантом осуществления изобретения указанные технические результаты достигаются тем, что в способе определения и фиксации нарушений правил дорожного движения и правил парковки транспортных средств при помощи видеокамеры осуществляют сканирование зоны контроля, на полученных видеокадрах выявляют и распознают государственные регистрационные знаки (ГРЗ) транспортных средств (ТС), определяют точное время и географические координаты фиксации каждого транспортного средства, сопоставляют полученную информацию о транспортных средствах с информацией о действующих в данной зоне ограничениях и правилах для транспортных средств, формируют и передают информацию о выявленных нарушениях, при этом для определения географических координат транспортных средств предварительно осуществляют калибровку видеокамеры для определения фактических размеров ее матрицы путем размещения калиброванной пластины ГРЗ на заданном расстоянии от видеокамеры, определяют фактические размеры матрицы видеокамеры с учетом фокусного расстояния ее объектива, размеров калиброванной пластины ГРЗ и заданного расстояния от калиброванной пластины ГРЗ до видеокамеры, на полученном в результате сканирования зоны контроля видеокадре производят распознавание символов ГРЗ ТС, по которым определяют тип пластины ГРЗ, измеряют координаты точек вершин углов изображения пластины ГРЗ в системе координат видеокадра, определяют геометрические размеры изображения пластины ГРЗ на видеокадре в пикселях, определяют соотношение ширины и высоты изображения пластины ГРЗ на видеокадре, а также значения углов, сравнивают эти значения с эталонными для данного типа распознанной пластины ГРЗ и по результатам сравнений вычисляют коэффициент сужения пластины ГРЗ, с учетом которого корректируют измеренную ширину изображения пластины ГРЗ на видеокадре, затем по величине фокусного расстояния объектива видеокамеры, ширины матрицы видеокамеры и скорректированной ширины изображения пластины ГРЗ определяют расстояние от видеокамеры до центра пластины ГРЗ ТС, рассчитывают расстояние от точки проекции видеокамеры на дорогу до точки проекции центра пластины ГРЗ на дорогу по известному расстоянию от видеокамеры до центра пластины ГРЗ и углу отклонения видеокамеры от вертикальной оси, после этого рассчитывают географические координаты ТС с учетом известных географических координат видеокамеры, предварительно измеренного угла отклонения видеокамеры от начального направления и известного расстояния от точки проекции видеокамеры на дорогу до точки проекции центра пластины ГРЗ ТС на дорогу.
Вышеуказанные функции позволяют размещать видеокамеру на территории, которая охватывает сразу несколько участков, для каждого из которых установлен свой перечень ограничений ПДД и/или правил парковки. В таких случаях использование заявленного способа позволяет с помощью одного комплекса охватить большую зону контроля и, следовательно, избежать дополнительных расходов на установку других аналогичных систем с более ограниченным функционалом.
Краткое описание чертежей
Предлагаемый способ поясняется фигурами 1-7.
На Фиг. 1 показан пример размещения поворотной видеокамеры в зоне контроля, транспортные средства, находящиеся на участках с разными требованиями правил дорожного движения и правил платной парковки.
На Фиг. 2 изображен видеокадр, сформированный видеокамерой и отображающий транспортное средство с ГРЗ 7, зафиксированное в зоне контроля видеокамеры.
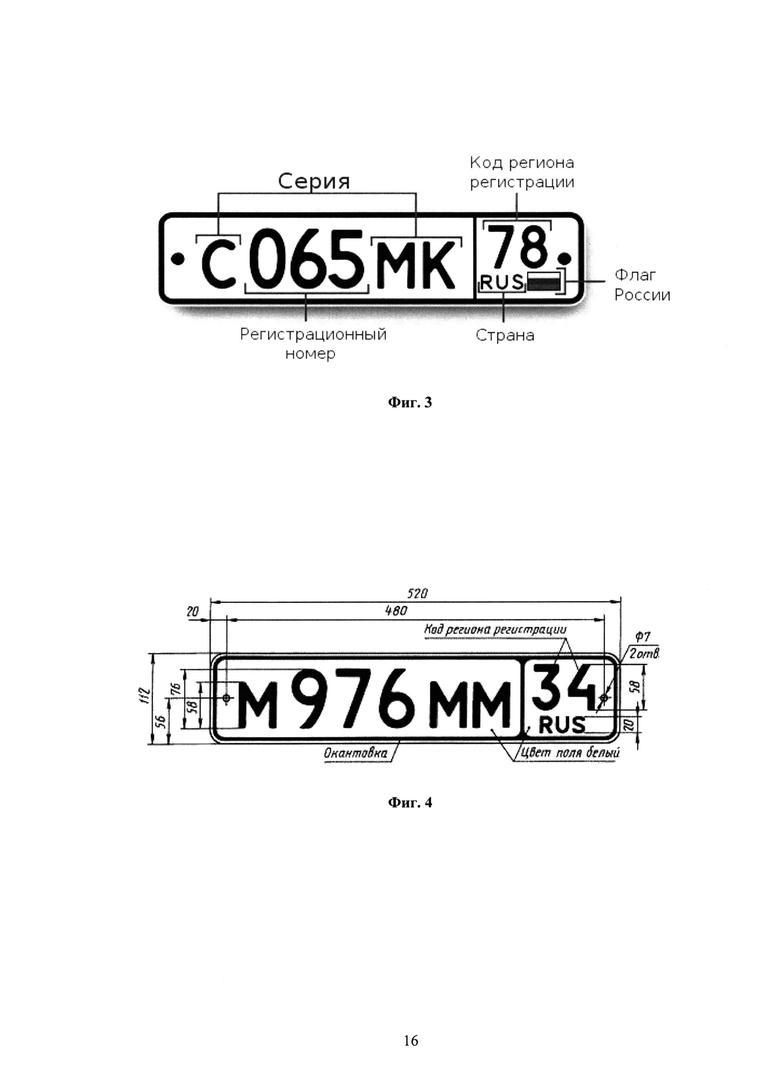
На Фиг. 3 изображена пластина ГРЗ 7 с обозначениями элементов ГРЗ 7, характерных для данного типа ГРЗ 7.
На Фиг. 4 изображена пластина ГРЗ 7 с ГОСТированными размерами элементов.
На Фиг. 5 изображена система координат видеокадра с указанными точками вершин пластины ГРЗ 7.
На Фиг. 6 изображены геометрические параметры изображения пластины ГРЗ 7, которые определяются в системе координат видеокадра и используются для определения искажений изображения пластины 7 и коррекции этих искажений.
На Фиг. 7 изображена схема, поясняющая закон оптики о соотношении размеров и расстояний объекта и его изображения, полученного с помощью оптической линзы: «а» - скорректированная ширина изображения пластины ГРЗ на видеокадре, «В» - стандартная ширина распознанной пластины ГРЗ, «L» - расстояние от точки фокуса видеокамеры до пластины ГРЗ, «f» - фокусное расстояние видеокамеры.
Осуществление изобретения
Способ определения и фиксации нарушений правил дорожного движения и правил парковки транспортных средств позволяет определять и фиксировать нарушения правил дорожного движения, связанные в первую очередь с ограничениями правил парковки, остановки и стоянки автотранспорта в городских условиях. Данные о транспортных средствах могут также оперативно проверяться по базам данных розыска и другим внешним базам. Полученная информация о правонарушениях направляется в государственные службы для вынесения постановлений об административных правонарушениях и др.
Использование поворотной видеокамеры позволяет контролировать зону в 360° на расстоянии от 15 до 100 и более метров от видеокамеры. Видеокамера может монтироваться на стационарных опорах круглого или прямоугольного сечения или на плоских вертикальных поверхностях.
В состав видеокамеры входит специальный датчик угла поворота, отвечающий за определение точного угла поворота оптической оси видеокамеры относительно начального направления (в диапазоне от 0° до 359°), а также за определение угла отклонения видеокамеры от вертикальной оси.
Поворотная видеокамера используется для фиксации видеоизображения (серии кадров) транспортных средств на контролируемом участке. В качестве видеокамеры используют цифровую мегапиксельную высокочувствительную камеру, оснащенную средством инфракрасного освещения для улучшения качества изображения в ночное время суток. В условиях недостаточной освещенности видеокамера автоматически переключается из цветного режима работы в черно-белый. Автоматическое переключение режимов «день/ночь» позволяет использовать видеокамеру круглосуточно. Объектив видеокамеры - оптический трансфокатор с автофокусировкой.
Моторизированное поворотное устройство позволяет позиционировать видеокамеру с высокой точностью на 360° вокруг вертикальной оси и на 90° вверх/вниз, что позволяет обозревать пространство вокруг видеокамеры в радиусе до 100 м. Защитный кожух видеокамеры позволяет эксплуатировать видеокамеру на открытом воздухе круглосуточно в любое время года.
Для выявления и фиксации нарушений правил дорожного движения и правил парковки осуществляют распознавание ГРЗ транспортных средств (ТС), попавших в зону контроля. В момент первой фиксации транспортного средства определяют его точные географические координаты и время фиксации. Данная информация анализируется при помощи специального программного обеспечения и сравнивается с информацией о существующих в зоне контроля видеокамеры участках с перечнем действующих ограничений в отношении транспортных средств. Эти ограничения могут быть связаны с правилами остановки, стоянки и парковки ТС, в том числе, в соответствии с требованиями дорожных знаков и разметки.
Если транспортное средство зафиксировано в зоне запрещенной остановки, то обрабатывается по меньшей мере еще один видеокадр с временным интервалом не менее 2 секунд, для которого также устанавливаются географические координаты транспортного средства. Если координаты ТС остались прежними, то специальное программное обеспечение формирует информацию о выявленном правонарушении, которая направляется с помощью специальных средств связи в соответствующие государственные органы.
Если транспортное средство зафиксировано в зоне запрещенной стоянки, то с момента первой фиксации осуществляется отсчет времени, в течение которого остановка на данном участке разрешена. Если после очередной или повторной фиксации установлено, что транспортное средство находится на данном участке дольше разрешенного времени, формируется пакет данных о выявленном правонарушении.
Если транспортное средство зафиксировано в зоне разрешенной платной парковки, то в отношении такого ТС формируется пакет данных, включающий данные о месте и времени нахождения данного ТС на данном участке, после чего такая информация сопоставляется с информацией о времени, которое было фактически оплачено за пользование платной парковкой. В случаях неоплаты или неполной оплаты парковки в отношении зафиксированного транспортного средства также формируется пакет информации об административном правонарушении для отправки в соответствующие государственные службы.
Для определения точных географических координат идентифицированных в зоне контроля транспортных средств осуществляют предварительную калибровку видеокамеры и датчика угла поворота видеокамеры, а также измеряют точные географические координаты самой видеокамеры. В соответствии с одним вариантом осуществления изобретения предварительно измеряют также высоту подвеса видеокамеры над землей (дорогой).
Поворотная видеокамера обозревает зону контроля путем последовательной дискретной фокусировки на различные участки (порядок наведения и перечень участков настраивается пользователем заранее), при наведении на каждый участок видеокамера формирует обзорное и детальное статичное изображение. В результате анализа статичного изображения в каждом положении производится выявление движущихся ТС и стоящих неподвижно, что позволяет отфильтровать движущиеся ТС из числа возможных нарушителей правил размещения транспортных средств (стоянки, парковки и т.п.).
Фиксируют видеокадр с изображением находящегося в зоне контроля транспортного средства с видимой пластиной государственного регистрационного знака (ГРЗ). Для определения географических координат транспортного средства достаточно одного видеокадра с изображением пластины ГРЗ (см. Фиг. 2).
Производят распознавание символов ГРЗ и определение типа ГРЗ (см. Фиг. 3). Для определения географических координат транспортного средства сначала определяют расстояние до него, т.е. до пластины ГРЗ. Для этого необходимо знать реальные размеры пластины ГРЗ. Размеры всех пластин ГРЗ ГОСТированы. При распознавании символов и определении типа ГРЗ можно узнать стандартные размеры пластины для идентифицированного типа ГРЗ из справочных данных (См. Фиг. 4).
Измеряют координаты точек вершин пластины ГРЗ в системе координат видеокадра, а затем геометрические размеры изображения ГРЗ на видеокадре в пикселях. Видеокадр, отображающий зону контроля видеокамеры, имеет размеры Vx по ширине и Vy по высоте в пикселях (см. Фиг. 5). Значения Vx и Vy известны заранее как параметры матрицы видеокамеры. С помощью программного обеспечения (ПО) определяются координаты 4-х точек вершин пластины ГРЗ в пикселях в системе координат видеокадра, а затем вычисляются геометрические размеры изображения пластины ГРЗ на видеокадре: проекция ширины пластины Sx, проекция высоты пластины Sy, углы отклонения от осей αх и αу (см. Фиг. 6).
Предварительно производят калибровку датчика угла поворота видеокамеры относительно вертикальной оси - задают значение угла поворота, соответствующее начальному (например, направление севера) направлению. Данный датчик также показывает угол отклонения видеокамеры относительно вертикальной оси.
Также предварительно калибруют видеокамеру, для чего размещают в зоне контроля калиброванную пластину ГРЗ на заданном расстоянии от видеокамеры и определяют фактическую ширину матрицы видеокамеры (размер «а», см. Фиг. 7), с учетом фокусного расстояния объектива видеокамеры (размер «f», вычисляется программным обеспечением камеры, см. Фиг. 7), размеров калиброванной пластины ГРЗ (размер «В», гостирован, см. Фиг. 7) и заданного расстояния от калиброванной пластины ГРЗ до видеокамеры (размер «L+f», измерен при калибровке, см. Фиг. 7). Находят значение «L», после чего из соотношения a/f=B/L определяют значение «а».
Используя измеренные размеры изображения пластины на видеокадре (Sx, Sy, αx и αу), вычисляют углы поворота пластины ГРЗ в пространстве относительно видеокамеры, затем вычисляют коэффициент сужения пластины ГРЗ, с учетом которого корректируют измеренную ширину изображения пластины ГРЗ на видеокадре. По известной величине фокусного расстояния объектива видеокамеры, с учетом фактически полученных размеров матрицы видеокамеры и скорректированной ширины изображения пластины ГРЗ, определяют расстояние «L+f» от видеокамеры до центра пластины ГРЗ транспортного средства (см. Фиг. 7). Из соотношения a/f=B/L определяют расстояние от точки фокуса видеокамеры до пластины ГРЗ «L», где «а» - скорректированная ширина изображения пластины ГРЗ на видеокадре, «В» - стандартная (тестированная) ширина распознанной пластины ГРЗ, «L» - расстояние от точки фокуса видеокамеры до пластины ГРЗ, «f» - фокусное расстояние видеокамеры. Затем определяют искомое расстояние от видеокамеры до пластины ГРЗ как сумму «L» и «f» (L+f). Таким образом, искомое расстояние от видеокамеры до транспортного средства определяется как расстояние от видеокамеры до центра пластины ГРЗ.
Зная расстояние от видеокамеры до транспортного средства, а также высоту подвеса видеокамеры над землей или угол отклонения видеокамеры от вертикальной оси, вычисляют расстояние от точки проекции видеокамеры до точки проекции центра пластины ГРЗ, используя теорему Пифагора или др. формулы (например из равенства "катет равен произведению гипотенузы на синус противолежащего угла").
По известному расстоянию от точки проекции видеокамеры до точки проекции центра пластины ГРЗ, а также углу поворота видеокамеры относительно начального направления и известным географическим координатам самой видеокамеры вычисляют абсолютные географические координаты ТС.
Данные о географических координатах рассчитывают для каждого случая фиксации транспортного средства. Эти данные, а также время каждой фиксации ТС используются для выявления и фиксации нарушений правил дорожного движения и правил парковки с участием транспортных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2580332C1 |
| Система определения скорости транспортного средства на участке | 2020 |
|
RU2733638C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2579645C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ОТ ВИДЕОКАМЕРЫ ИЗМЕРИТЕЛЯ СКОРОСТИ ДО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2011 |
|
RU2470376C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2419884C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2442218C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ С ПОСЛЕДУЮЩЕЙ ИХ ИДЕНТИФИКАЦИЕЙ И АВТОМАТИЧЕСКОЙ РЕГИСТРАЦИЕЙ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2382416C2 |
| Система видеофиксации нарушений правил дорожного движения на перекрестке и способ ее работы | 2017 |
|
RU2668878C1 |
| Система фото-, видеофиксации нарушений правил дорожного движения и способ её работы | 2018 |
|
RU2711825C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОРОГЕ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2559418C2 |


Изобретение относится к контрольно-измерительной технике, а также контролю и регулированию дорожного движения. Более конкретно изобретение относится к способу определения и фиксации нарушений правил дорожного движения и правил парковки транспортных средств. Способ заключается в том, что при помощи видеокамеры осуществляют сканирование зоны контроля, на полученных видеокадрах выявляют и распознают государственные регистрационные знаки (ГРЗ) транспортных средств (ТС), определяют точное время и географические координаты фиксации каждого транспортного средства, сопоставляют полученную информацию о транспортных средствах с информацией о действующих в данной зоне ограничениях и правилах платной парковки транспортных средств для принятия решения о возможных нарушениях, при этом для определения географических координат транспортных средств предварительно осуществляют калибровку видеокамеры для определения точных размеров ее матрицы путем размещения калиброванной пластины ГРЗ на заданном расстоянии от видеокамеры, определяют фокусное расстояние объектива видеокамеры с учетом ширины ее матрицы, размеров калиброванной пластины ГРЗ и заданного расстояния от калиброванной пластины ГРЗ до видеокамеры, на полученном в результате сканирования видеокадре производят распознавание символов ГРЗ ТС, по которым определяют тип пластины ГРЗ, измеряют координаты точек вершин углов изображения пластины ГРЗ в системе координат видеокадра, определяют геометрические размеры изображения пластины ГРЗ на видеокадре в пикселях, определяют соотношение ширины и высоты изображения пластины ГРЗ на видеокадре, сравнивают это значение с эталонным для данного типа распознанной пластины ГРЗ и по результатам сравнений вычисляют коэффициент. Обеспечивается контроль соблюдения правил дорожного движения, в частности требований дорожных знаков, правил остановки, стоянки и платной парковки в городских условиях. 2 н. и 5 з.п. ф-лы, 7 ил.
1. Способ определения и фиксации нарушений правил дорожного движения и правил парковки транспортных средств, заключающийся в том, что при помощи видеокамеры осуществляют сканирование зоны контроля, на полученных видеокадрах выявляют и распознают государственные регистрационные знаки (ГРЗ) транспортных средств (ТС), определяют точное время и географические координаты фиксации каждого транспортного средства, сопоставляют полученную информацию о транспортных средствах с информацией о действующих в данной зоне ограничениях и правилах для транспортных средств, формируют и передают информацию о выявленных нарушениях, отличающийся тем, что для определения географических координат транспортных средств предварительно осуществляют калибровку видеокамеры для определения фактических размеров ее матрицы путем размещения калиброванной пластины ГРЗ на заданном расстоянии от видеокамеры, определяют фактические размеры матрицы видеокамеры с учетом фокусного расстояния ее объектива, размеров калиброванной пластины ГРЗ и заданного расстояния от калиброванной пластины ГРЗ до видеокамеры, на полученном в результате сканирования зоны контроля видеокадре производят распознавание символов ГРЗ ТС, по которым определяют тип пластины ГРЗ, измеряют координаты точек вершин углов изображения пластины ГРЗ в системе координат видеокадра, определяют геометрические размеры изображения пластины ГРЗ на видеокадре в пикселях, определяют соотношение ширины и высоты изображения пластины ГРЗ на видеокадре, а также значения углов, сравнивают эти значения с эталонными для данного типа распознанной пластины ГРЗ и по результатам сравнений вычисляют коэффициент сужения пластины ГРЗ, с учетом которого корректируют измеренную ширину изображения пластины ГРЗ на видеокадре, затем по величине фокусного расстояния объектива видеокамеры, ширины матрицы видеокамеры и скорректированной ширины изображения пластины ГРЗ определяют расстояние от видеокамеры до центра пластины ГРЗ ТС, затем рассчитывают расстояние от точки проекции видеокамеры на дорогу до точки проекции центра пластины ГРЗ на дорогу по предварительно измеренному значению высоты подвеса видеокамеры над дорогой и известному расстоянию от видеокамеры до центра пластины ГРЗ, при этом из значения высоты подвеса видеокамеры вычитают высоту подвеса пластины ГРЗ на транспортном средстве, после этого рассчитывают географические координаты ТС с учетом известных географических координат видеокамеры, предварительно измеренного угла отклонения видеокамеры от начального направления и известного расстояния от точки проекции видеокамеры на дорогу до точки проекции центра пластины ГРЗ ТС на дорогу.
2. Способ по п. 1, отличающийся тем, что высоту подвеса пластины ГРЗ на транспортном средстве принимают равной от 20 до 100 см.
3. Способ по п. 2, отличающийся тем, что высоту подвеса пластины ГРЗ на транспортном средстве принимают равной 40 см.
4. Способ по п. 1, отличающийся тем, что сканирование зоны контроля осуществляют по заранее настроенным точкам в пространстве.
5. Способ по п. 1, отличающийся тем, что географические координаты ТС определяют для каждого видеокадра, на котором зафиксировано ГРЗ данного ТС.
6. Способ по п. 1, отличающийся тем, что сканирование зоны контроля осуществляют одновременно двумя или более видеокамерами.
7. Способ определения и фиксации нарушений правил дорожного движения и правил парковки транспортных средств, заключающийся в том, что при помощи видеокамеры осуществляют сканирование зоны контроля, на полученных видеокадрах выявляют и распознают государственные регистрационные знаки (ГРЗ) транспортных средств (ТС), определяют точное время и географические координаты фиксации каждого транспортного средства, сопоставляют полученную информацию о транспортных средствах с информацией о действующих в данной зоне ограничениях и правилах для транспортных средств, формируют и передают информацию о выявленных нарушениях, отличающийся тем, что для определения географических координат транспортных средств предварительно осуществляют калибровку видеокамеры для определения фактических размеров ее матрицы путем размещения калиброванной пластины ГРЗ на заданном расстоянии от видеокамеры, определяют фактические размеры матрицы видеокамеры с учетом фокусного расстояния ее объектива, размеров калиброванной пластины ГРЗ и заданного расстояния от калиброванной пластины ГРЗ до видеокамеры, на полученном в результате сканирования зоны контроля видеокадре производят распознавание символов ГРЗ ТС, по которым определяют тип пластины ГРЗ, измеряют координаты точек вершин углов изображения пластины ГРЗ в системе координат видеокадра, определяют геометрические размеры изображения пластины ГРЗ на видеокадре в пикселях, определяют соотношение ширины и высоты изображения пластины ГРЗ на видеокадре, а также значения углов, сравнивают эти значения с эталонными для данного типа распознанной пластины ГРЗ и по результатам сравнений вычисляют коэффициент сужения пластины ГРЗ, с учетом которого корректируют измеренную ширину изображения пластины ГРЗ на видеокадре, затем по величине фокусного расстояния объектива видеокамеры, ширины матрицы видеокамеры и скорректированной ширины изображения пластины ГРЗ определяют расстояние от видеокамеры до центра пластины ГРЗ ТС, рассчитывают расстояние от точки проекции видеокамеры на дорогу до точки проекции центра пластины ГРЗ на дорогу по известному расстоянию от видеокамеры до центра пластины ГРЗ и углу отклонения видеокамеры от вертикальной оси, после этого рассчитывают географические координаты ТС с учетом известных географических координат видеокамеры, предварительно измеренного угла отклонения видеокамеры от начального направления и известного расстояния от точки проекции видеокамеры на дорогу до точки проекции центра пластины ГРЗ ТС на дорогу.
| Гидрогранулятор для грануляции расплавов | 1961 |
|
SU144184A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ С ПОСЛЕДУЮЩЕЙ ИХ ИДЕНТИФИКАЦИЕЙ И АВТОМАТИЧЕСКОЙ РЕГИСТРАЦИЕЙ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2382416C2 |
| Газовая горелка для водоподогревателей проточного типа | 1956 |
|
SU113398A1 |

