Область техники, к которой относится изобретение
Изобретение относится к контрольно-измерительной технике, а именно к способу определения абсолютных географических координат транспортных средств. Изобретение может быть использовано в системах управления и контроля за подвижными наземными объектами, в частности автотранспортными средствами, а также для выявления и фиксации случаев нарушения правил дорожного движения и других ограничений для транспортных средств.
Уровень техники
В настоящее время известно несколько способов определения координат транспортных средств. Наиболее широко используются способы, позволяющие отслеживать отдельные транспортные средства с помощью системы спутниковой навигации.
Общим недостатком таких систем является необходимость установки на каждом идентифицируемом транспортном средстве специального навигационного приемника и средств обработки спутниковых сигналов. Кроме того, подобные системы не дают точную информацию о местоположении транспортного средства. Результаты, полученные таким способом, имеют значительные погрешности, что не позволяет использовать их, например, в системах и способах автоматизированного учета нарушений правил дорожного движения, где требуется определение точных географических координат транспортного средства.
Известна система обнаружения и идентификации транспортных средств (патент РФ №2514025, МПК G08G 1/017, 1/042, B60R 13/10, опубл. 27.04.2014 г.), содержащая установленные на транспортных средствах электронные средства идентификации с электронной памятью и считыватель для чтения и/или записи информации с электронных средств идентификации частотного диапазона HF, при этом электронные средства идентификации транспортного средства выполнены в виде встроенного в регистрационный номерной знак транспортного средства резонатора, содержащего многовитковую рамку и соединенный с ней микрочип, запитываемый электрическим током, индуцируемым внешним переменным магнитным полем, с энергонезависимой памятью, обеспечивающей хранение идентификационных данных транспортного средства, включающих, по меньшей мере, данные о регистрационном номере транспортного средства.
Для обнаружения транспортных средств, в том числе находящихся в угоне, используют также радиопоисковые системы (см., например, патент РФ №2244642, МПК B60R 25/00, опубл. 20.01.2005 г.). Для этих целей на охраняемом транспортном средстве устанавливают специальные абонентские комплексы, которые взаимодействуют с радиопоисковыми комплексами быстрого реагирования и способны передавать информацию о местоположении транспортного средства и даже блокировать его передвижение в ответ на соответствующие радиосигналы.
Вышеописанные системы требуют оснащения каждого идентифицируемого транспортного средства дополнительным оборудованием, которое будет передавать сигналы на стационарные приемники только при нахождении транспортного средства в непосредственной близости от них. Полученная таким образом информация о местонахождении транспортного средства не является достаточно полной и достоверной.
Известен способ определения скорости движения и координат транспортных средств с последующей их идентификацией и автоматической регистрацией нарушений правил дорожного движения (патент РФ №2382416, МПК G08G 1/052, 1/017, G07C 5/08, опубл. 20.02.2010 г.), в котором импульсы радиолокатора излучают синхронно с видеосъемкой того же участка дорожного полотна видеокамерой панорамного обзора, вычисляют координаты и скорости транспортных средств, находящихся в кадре, после чего сравнивают получаемые независимо друг от друга посредством радиолокатора и видеокамеры панорамного обзора потоки данных, содержащие значения скоростей и координат всех ТС, находящихся в текущий момент на выбранном участке дорожного полотна, причем для получения метрологически достоверных данных о скоростях и координатах ТС используют данные радиолокатора, а за достоверные данные о координатах тех же ТС принимают данные, полученные от видеокамеры панорамного обзора.
Указанный способ позволяет установить лишь координаты движущегося транспортного средства в момент прохождении им вблизи стационарной зоны контроля, он требует использования более сложного оборудования и неэффективен в условиях города. Подобные пункты контроля размещают в основном на дорогах с большой пропускной способностью для контроля скоростного режима.
В современных условиях особенно актуальной стала задача определения точных координат транспортных средств, например, находящихся в неподвижном состоянии в пределах городской дорожной сети. Это связано с переходом на автоматизированные системы контроля дорожного движения и фиксации нарушений, а также с тем, что для выявления и фиксации большого количества нарушений правил дорожного движения (ПДД) требуется определение точного местоположения автомобиля в месте его остановки или стоянки.
В патенте KR 101307234 В1 (МПК G01S 5/16; G08G 1/017; G08G 1/04; G08G 1/14, опубл. 11.09.2013 г.) раскрывается система управления парковкой, где с помощью нескольких видеокамер идентифицируют транспортное средство и определяют его местоположение на территории данной парковки. Несмотря на использование сразу нескольких видеокамер, данная система не позволяет определить абсолютные географические координаты транспортного средства.
Известен способ определения местоположения наземных подвижных объектов, в частности автотранспортных средств (патент РФ №2445576, МПК G01C 21/12, опубл. 20.03.2012 г.), в котором осуществляют отсчет от последних известных координат, полученных при помощи обработки сигналов спутниковой навигационной системы, измеряют параметры движения объектов и производят расчет географических координат, при этом измеряют дирекционный угол с помощью измерителя угла поворота, угол места с помощью акселерометра и радиальную скорость с помощью доплеровского радиолокационного измерителя скорости, осуществляют расчет координат объекта в прямоугольной системе и путем пересчета определяют местоположение наземного подвижного объекта в географической системе координат.
Недостатком способа является то, что в качестве начальной точки отсчета в нем используют координаты транспортного средства, полученные с помощью спутниковой навигационной системы, а система расчетов требует проведения нескольких измерений, что значительно увеличивает вероятность ошибки.
Настоящее изобретение направлено на устранение недостатков, присущих аналогам.
Раскрытие изобретения
Техническим результатом заявленного изобретения является создание недорогого, точного и простого в использовании способа бесконтактного определения абсолютных географических координат движущихся и неподвижных транспортных средств, не требующего установки дополнительного оборудования на идентифицируемые транспортные средства.
Согласно изобретению для осуществления идентификации транспортного средства и определения его абсолютных географических координат используется всего одно устройство - видеокамера, что значительно удешевляет способ и не требует специального технического обслуживания оборудования или подготовки идентифицируемых транспортных средств.
Способ может быть использован для определения географических координат как находящихся в движении, так и неподвижных транспортных средств. Информация о географических координатах, а также времени фиксации транспортных средств может быть использована для определения, находится ли транспортное средство в движении или нет, а также получения другой информации о транспортном средстве, например время стоянки, время начала и конца стоянки, направление движения и даже скорость передвижения. Такая информация может быть получена в ходе специальной обработки данных о географических координатах ТС и времени их первой и последующих фиксаций.
В соответствии с одним вариантом осуществления изобретения технический результат достигается тем, что в способе определения географических координат транспортных средств при помощи видеокамеры осуществляют сканирование зоны контроля, на полученных видеокадрах выявляют и распознают государственные регистрационные знаки (ГРЗ) транспортных средств (ТС), определяют точное время и географические координаты фиксации каждого транспортного средства, при этом для определения географических координат транспортных средств предварительно осуществляют калибровку видеокамеры для определения точных размеров ее матрицы путем размещения калиброванной пластины ГРЗ на заданном расстоянии от видеокамеры, определяют фокусное расстояние объектива видеокамеры с учетом ширины ее матрицы, размеров калиброванной пластины ГРЗ и заданного расстояния от калиброванной пластины ГРЗ до видеокамеры, на полученном в результате сканирования видеокадре производят распознавание символов ГРЗ ТС, по которым определяют тип пластины ГРЗ, измеряют координаты точек вершин углов изображения пластины ГРЗ в системе координат видеокадра, определяют геометрические размеры изображения пластины ГРЗ на видеокадре в пикселях, определяют соотношение ширины и высоты изображения пластины ГРЗ на видеокадре, сравнивают это значение с эталонным для данного типа распознанной пластины ГРЗ и по результатам сравнений вычисляют коэффициент сужения пластины ГРЗ, с учетом которого корректируют измеренную ширину изображения пластины ГРЗ на видеокадре, затем по величине фокусного расстояния объектива видеокамеры, ширины матрицы видеокамеры и скорректированной ширины изображения пластины ГРЗ определяют расстояние от видеокамеры до центра пластины ГРЗ ТС, затем рассчитывают расстояние от точки проекции видеокамеры на дорогу до точки проекции центра пластины ГРЗ на дорогу по предварительно измеренному значению высоты подвеса видеокамеры над дорогой и известному расстоянию от видеокамеры до центра пластины ГРЗ, при этом из значения высоты подвеса видеокамеры вычитают высоту подвеса пластины ГРЗ на транспортном средстве, после этого рассчитывают географические координаты ТС с учетом известных географических координат видеокамеры, предварительно измеренного угла отклонения видеокамеры от направления севера и известного расстояния от точки проекции видеокамеры на дорогу до точки проекции центра пластины ГРЗ ТС на дорогу.
В данном способе принимается, что высота подвеса пластины ГРЗ на транспортном средстве может составлять от 20 до 100 см. В большинстве случаев высоту подвеса пластины ГРЗ на транспортном средстве принимают равной 40 см.
В соответствии с другим вариантом осуществления изобретения технический результат достигается тем, что в способе определения географических координат транспортных средств при помощи видеокамеры осуществляют сканирование зоны контроля, на полученных видеокадрах выявляют и распознают государственные регистрационные знаки (ГРЗ) транспортных средств (ТС), определяют точное время и географические координаты фиксации каждого транспортного средства, при этом для определения географических координат транспортных средств предварительно осуществляют калибровку видеокамеры для определения фактических размеров ее матрицы путем размещения калиброванной пластины ГРЗ на заданном расстоянии от видеокамеры, определяют фактические размеры матрицы видеокамеры с учетом фокусного расстояния ее объектива, размеров калиброванной пластины ГРЗ и заданного расстояния от калиброванной пластины ГРЗ до видеокамеры, на полученном в результате сканирования зоны контроля видеокадре производят распознавание символов ГРЗ ТС, по которым определяют тип пластины ГРЗ, измеряют координаты точек вершин углов изображения пластины ГРЗ в системе координат видеокадра, определяют геометрические размеры изображения пластины ГРЗ на видеокадре в пикселях, определяют соотношение ширины и высоты изображения пластины ГРЗ на видеокадре, а также значения углов, сравнивают эти значения с эталонными для данного типа распознанной пластины ГРЗ и по результатам сравнений вычисляют коэффициент сужения пластины ГРЗ, с учетом которого корректируют измеренную ширину изображения пластины ГРЗ на видеокадре, затем по величине фокусного расстояния объектива видеокамеры, ширины матрицы видеокамеры и скорректированной ширины изображения пластины ГРЗ определяют расстояние от видеокамеры до центра пластины ГРЗ ТС, рассчитывают расстояние от точки проекции видеокамеры на дорогу до точки проекции центра пластины ГРЗ на дорогу по известному расстоянию от видеокамеры до центра пластины ГРЗ и углу отклонения видеокамеры от вертикальной оси, после этого рассчитывают географические координаты ТС с учетом известных географических координат видеокамеры, предварительно измеренного угла отклонения видеокамеры от начального направления и известного расстояния от точки проекции видеокамеры на дорогу до точки проекции центра пластины ГРЗ ТС на дорогу.
Сканирование зоны контроля осуществляют при помощи поворотной видеокамеры, которую заранее настраивают и калибруют по заданным точкам в пространстве. Географические координаты ТС определяют для каждого видеокадра, на котором зафиксировано ГРЗ данного ТС. Сканирование зоны контроля может также осуществляться одновременно двумя или более видеокамерами.
Поворотную видеокамеру закрепляют неподвижно сверху над зоной контроля. Зона контроля может охватывать дорожное полотно, зоны парковки и стоянки автотранспорта, а также другие интересующие участки.
Краткое описание чертежей
Предлагаемый способ поясняется фигурами 1-6.
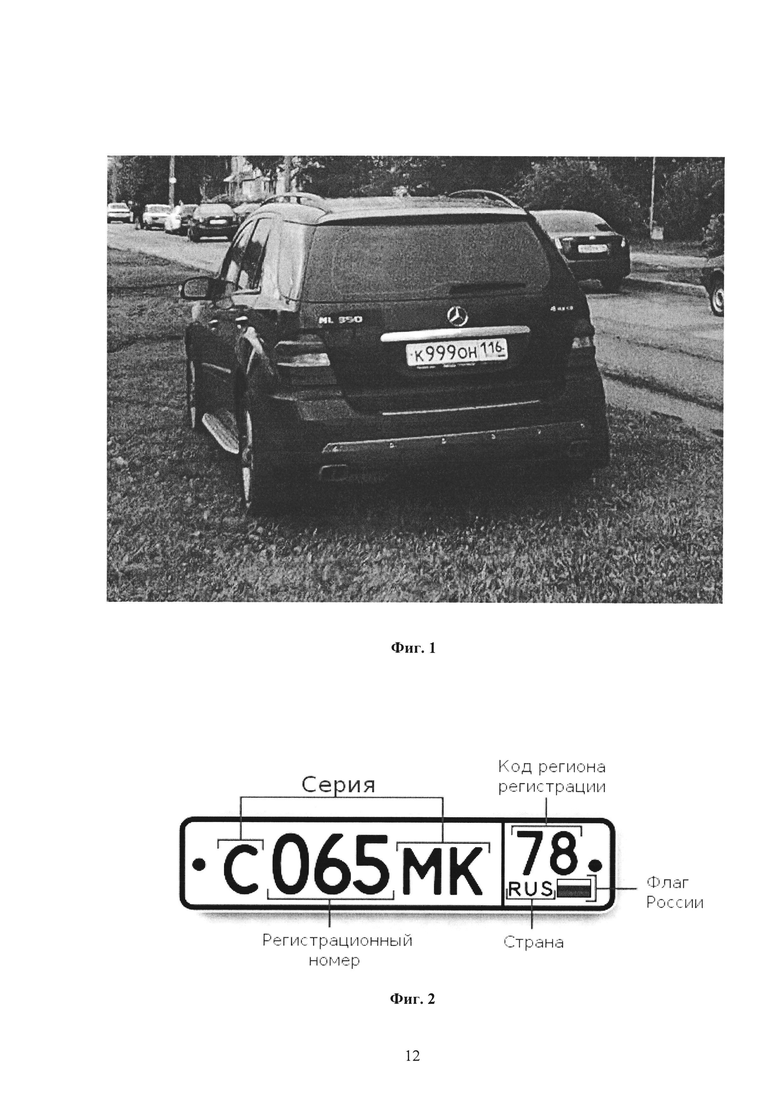
На Фиг. 1 изображен видеокадр, сформированный видеокамерой и отображающий транспортное средство с ГРЗ 7, зафиксированное в зоне контроля видеокамеры.
На Фиг. 2 изображена пластина ГРЗ 7 с обозначениями элементов ГРЗ, характерных для данного типа ГРЗ.
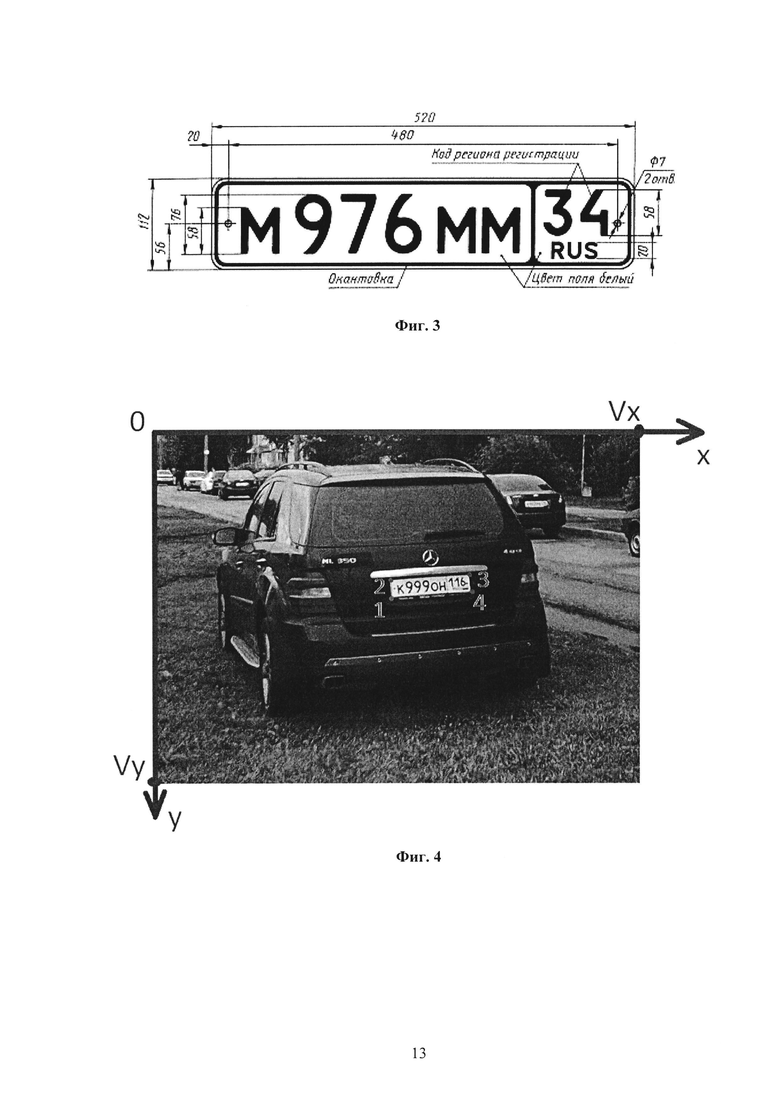
На Фиг. 3 изображена пластина ГРЗ с ГОСТированными размерами элементов.
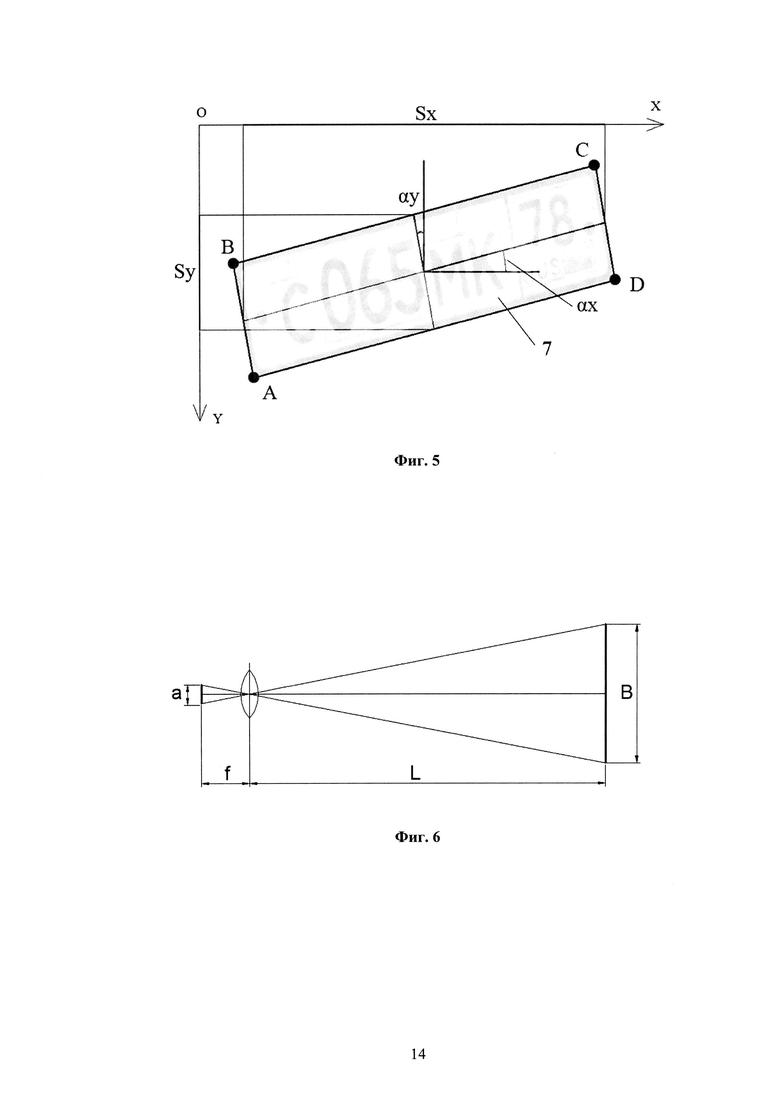
На Фиг. 4 изображена система координат видеокадра с указанными точками вершин пластины ГРЗ 7.
На Фиг. 5 изображены геометрические параметры изображения пластины ГРЗ 7, которые определяются в системе координат видеокадра и используются для определения искажений изображения пластины 7 и коррекции этих искажений.
На Фиг. 6 изображена схема, поясняющая закон оптики о соотношении размеров и расстояний объекта и его изображения, полученного с помощью оптической линзы.
Осуществление изобретения
Способ позволяет определять и фиксировать географические координаты движущихся и неподвижных транспортных средств. Особенно эффективно способ может быть реализован в городских условиях. Данные о транспортных средствах могут быть оперативно обработаны с помощью специализированных программ для дальнейшего использования специальными службами или могут подвергаться статистической обработке.
Способ определения географических координат транспортных средств реализуется следующим образом.
Для получения точных географических координат местонахождения зафиксированного видеокамерой транспортного средства предварительно проводят измерения и устанавливают точные географические координаты закрепленной на неподвижной опоре поворотной видеокамеры. В таком случае начальной точкой отсчета координат транспортного средства являются абсолютные географические координаты видеокамеры, которые являются величиной постоянной и не допускают какой-либо погрешности на данном этапе. Также производят калибровку угла отклонения оптической оси видеокамеры относительно вертикальной оси, а также угла поворота видеокамеры в горизонтальной плоскости относительно вертикальной оси (направление оптической оси). В соответствии с одним вариантом осуществления изобретения предварительно измеряют также высоту подвеса видеокамеры над землей (дорогой).
Использование поворотной видеокамеры позволяет контролировать зону в 360° на расстоянии от 5 до 100 и более метров от видеокамеры. Видеокамера может монтироваться на стационарных опорах круглого, прямоугольного и др. сечения или на плоских вертикальных поверхностях.
В состав видеокамеры входит специальный датчик угла поворота, отвечающий за определение точного угла поворота оптической оси видеокамеры относительно начального направления (в диапазоне от 0° до 359°), а также за определение угла отклонения видеокамеры от вертикальной оси.
Поворотная видеокамера используется для фиксации видеоизображения (серии кадров) транспортных средств на контролируемом участке. В качестве видеокамеры используют цифровую мегапиксельную высокочувствительную камеру, оснащенную средством инфракрасного освещения для улучшения качества изображения в ночное время суток. В условиях недостаточной освещенности видеокамера автоматически переключается из цветного режима работы в черно-белый. Автоматическое переключение режимов «день/ночь» позволяет использовать видеокамеру круглосуточно. Объектив видеокамеры - оптический трансфокатор с автофокусировкой.
Моторизированное поворотное устройство позволяет позиционировать видеокамеру с высокой точностью на 360° вокруг вертикальной оси и на 90° вверх/вниз, что позволяет обозревать пространство вокруг видеокамеры в радиусе до 100 м. Защитный кожух видеокамеры позволяет эксплуатировать видеокамеру на открытом воздухе круглосуточно в любое время года.
При помощи поворотной видеокамеры сканируют зону контроля путем последовательной дискретной фокусировки на различные участки, при наведении на каждый участок видеокамера формирует обзорное и детальное статичное изображение. Количество таких участков (точек), их параметры и последовательность наведения на них видеокамеры настраивается в индивидуальном порядке оператором, в зависимости от особенностей конкретной зоны контроля, чтобы максимально охватить области наибольшего интереса. На этом этапе, в результате анализа статичного изображения в каждом положении возможно выявление движущихся ТС и стоящих неподвижно.
На полученных видеокадрах при помощи специализированного программного обеспечения выявляют и распознают государственные регистрационные знаки (ГРЗ) транспортных средств (ТС) (см. Фиг. 2). Для каждого идентифицированного ГРЗ автоматически записывают точное время фиксации, а также параметры, необходимые для вычисления географических координат транспортного средства. К таким параметрам, в частности, относятся угол отклонения оптической оси видеокамеры относительно вертикальной оси, а также относительно начального направления в горизонтальной плоскости. За начальное направление обычно принимают направление севера. Для определения географических координат транспортного средства достаточно одного видеокадра с изображением пластины ГРЗ (см. Фиг. 1).
Определяют расстояние до идентифицированного ТС, т.е. до пластины ГРЗ. Для этого необходимо знать реальные размеры пластины ГРЗ. Размеры всех пластин ГРЗ ГОСТированы. При распознавании символов и определении типа ГРЗ можно узнать стандартные размеры пластины для идентифицированного типа ГРЗ из справочных данных (см. Фиг. 3).
Измеряют координаты точек вершин пластины ГРЗ в системе координат видеокадра, а затем геометрические размеры изображения ГРЗ на видеокадре в пикселях. Видеокадр, отображающий зону контроля видеокамеры, имеет размеры Vx по ширине и Vy по высоте в пикселях (см. Фиг. 4). Значения Vx и Vy известны заранее как параметры матрицы видеокамеры. С помощью программного обеспечения (ПО) определяются координаты 4-х точек вершин пластины ГРЗ в пикселях в системе координат видеокадра, а затем вычисляются геометрические размеры изображения пластины ГРЗ на видеокадре: проекция ширины пластины Sx, проекция высоты пластины Sy, углы отклонения от осей αx и αy (см. Фиг. 5).
Предварительно калибруют видеокамеру, для чего размещают в зоне контроля калиброванную пластину ГРЗ на заданном расстоянии от видеокамеры и определяют фактическую ширину матрицы видеокамеры (размер «а», см. Фиг. 6) с учетом фокусного расстояния объектива видеокамеры (размер «f», вычисляется программным обеспечением камеры, см. Фиг. 6), размеров калиброванной пластины ГРЗ (размер «В», ГОСТирован, см. Фиг. 6) и заданного расстояния от калиброванной пластины ГРЗ до видеокамеры (размер «L+f», измерен при калибровке, см. Фиг. 6). Находят значение «L», после чего из соотношения a/f=B/L определяют значение «а».
Используя измеренные размеры изображения пластины на видеокадре (Sx, Sy, αx и αy), вычисляют углы поворота пластины ГРЗ в пространстве относительно видеокамеры, затем вычисляют коэффициент сужения пластины ГРЗ, с учетом которого корректируют измеренную ширину изображения пластины ГРЗ на видеокадре. По известной величине фокусного расстояния объектива видеокамеры, с учетом фактически полученных размеров матрицы видеокамеры и скорректированной ширины изображения пластины ГРЗ, определяют расстояние «L+f» от видеокамеры до центра пластины ГРЗ транспортного средства (см. Фиг. 6). Из соотношения a/f=B/L определяют расстояние от точки фокуса видеокамеры до пластины ГРЗ «L», где «а» - скорректированная ширина изображения пластины ГРЗ на видеокадре, «В» - стандартная (ГОСТированная) ширина распознанной пластины ГРЗ, «L» - расстояние от точки фокуса видеокамеры до пластины ГРЗ, «f» - фокусное расстояние видеокамеры. Затем определяют искомое расстояние от видеокамеры до пластины ГРЗ как сумму «L» и «f» (L+f). Таким образом, искомое расстояние от видеокамеры до транспортного средства определяется как расстояние от видеокамеры до центра пластины ГРЗ.
Зная расстояние от видеокамеры до транспортного средства, а также высоту подвеса видеокамеры над землей или угол отклонения видеокамеры от вертикальной оси, вычисляют расстояние от точки проекции видеокамеры до точки проекции центра пластины ГРЗ, используя теорему Пифагора или др. формулы (например, из равенства "катет равен произведению гипотенузы на синус противолежащего угла").
По известному расстоянию от точки проекции видеокамеры до точки проекции центра пластины ГРЗ, а также углу поворота видеокамеры относительно начального направления и известным географическим координатам самой видеокамеры вычисляют абсолютные географические координаты ТС.
Данные о географических координатах рассчитывают для каждого случая фиксации транспортного средства. Эти данные, а также время каждой фиксации ТС могут быть использованы для статистической обработки информации, а также различными службами для контроля транспорта или нарушений, связанных с использованием транспортных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ И ФИКСАЦИИ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ И ПРАВИЛ ПАРКОВКИ ТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2014 |
|
RU2578651C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ОТ ВИДЕОКАМЕРЫ ИЗМЕРИТЕЛЯ СКОРОСТИ ДО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2011 |
|
RU2470376C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2579645C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2419884C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2442218C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА ПРИ ПОМОЩИ КАМЕРЫ (ВАРИАНТЫ) | 2014 |
|
RU2602729C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОРОГЕ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2559418C2 |
| Универсальный способ фотофиксации нарушений ПДД | 2019 |
|
RU2749941C2 |
| Система определения скорости транспортного средства на участке | 2020 |
|
RU2733638C1 |
| СПОСОБ И СИСТЕМА КАЛИБРОВКИ КОМПЛЕКСА ИЗМЕРЕНИЯ СКОРОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2015 |
|
RU2592711C1 |
Изобретение относится к способу определения абсолютных географических координат транспортных средств (ТС). Согласно способу при помощи по меньшей мере одной видеокамеры осуществляют сканирование зоны контроля. На полученных видеокадрах распознают государственные регистрационные знаки (ГРЗ) ТС, определяют точное время и координаты фиксации каждого ТС. При этом предварительно осуществляют калибровку видеокамеры для определения точных размеров ее матрицы путем размещения калиброванной пластины ГРЗ на заданном расстоянии от видеокамеры, определяют фокусное расстояние объектива видеокамеры с учетом ширины ее матрицы, размеров пластины и заданного расстояния от пластины до видеокамеры. На полученном видеокадре производят распознавание символов, по которым определяют тип пластины, измеряют координаты точек вершин углов ее изображения в системе координат видеокадра, определяют геометрические размеры и соотношение ширины и высоты ее изображения, сравнивают это значение с эталонным для данного типа и по результатам сравнений вычисляют коэффициент сужения, с учетом которого корректируют измеренную ширину ее изображения. По величине фокусного расстояния объектива видеокамеры, ширины ее матрицы и скорректированной ширины изображения пластины определяют расстояние от видеокамеры до центра пластины, рассчитывают расстояние от точки проекции видеокамеры на дорогу до точки проекции центра пластины на дорогу по предварительно измеренному значению высоты подвеса видеокамеры над дорогой и известному расстоянию от видеокамеры до центра пластины. Из значения высоты подвеса видеокамеры вычитают высоту подвеса пластины на ТС и рассчитывают координаты ТС с учетом известных координат видеокамеры, предварительно измеренного утла отклонения видеокамеры от направления севера и известного расстояния от точки проекции видеокамеры на дорогу до точки проекции центра пластины на дорогу. Технический результат - повышение точности определения координат, упрощение использования. 4 з.п. ф-лы, 6 ил.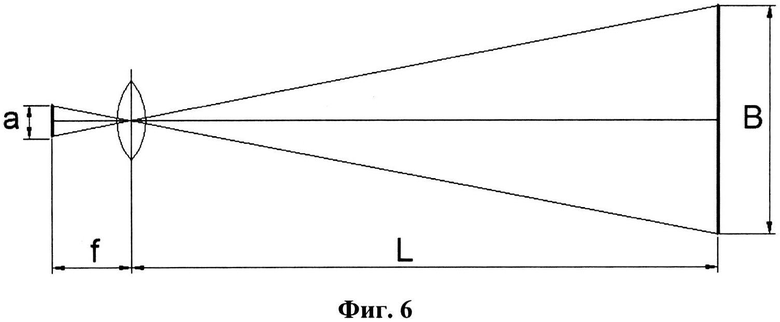
1. Способ определения географических координат транспортных средств, заключающийся в том, что при помощи, по меньшей мере, одной видеокамеры осуществляют сканирование зоны контроля, на полученных видеокадрах выявляют и распознают государственные регистрационные знаки (ГРЗ) транспортных средств (ТС), определяют точное время и географические координаты фиксации каждого транспортного средства, отличающийся тем, что для определения географических координат транспортных средств предварительно осуществляют калибровку видеокамеры для определения точных размеров ее матрицы путем размещения калиброванной пластины ГРЗ на заданном расстоянии от видеокамеры, определяют фокусное расстояние объектива видеокамеры с учетом ширины ее матрицы, размеров калиброванной пластины ГРЗ и заданного расстояния от калиброванной пластины ГРЗ до видеокамеры, на полученном в результате сканирования видеокадре производят распознавание символов ГРЗ ТС, по которым определяют тип пластины ГРЗ, измеряют координаты точек вершин углов изображения пластины ГРЗ в системе координат видеокадра, определяют геометрические размеры изображения пластины ГРЗ на видеокадре в пикселях, определяют соотношение ширины и высоты изображения пластины ГРЗ на видеокадре, сравнивают это значение с эталонным для данного типа распознанной пластины ГРЗ и по результатам сравнений вычисляют коэффициент сужения пластины ГРЗ, с учетом которого корректируют измеренную ширину изображения пластины ГРЗ на видеокадре, затем по величине фокусного расстояния объектива видеокамеры, ширины матрицы видеокамеры и скорректированной ширины изображения пластины ГРЗ определяют расстояние от видеокамеры до центра пластины ГРЗ ТС, затем рассчитывают расстояние от точки проекции видеокамеры на дорогу до точки проекции центра пластины ГРЗ на дорогу по предварительно измеренному значению высоты подвеса видеокамеры над дорогой и известному расстоянию от видеокамеры до центра пластины ГРЗ, при этом из значения высоты подвеса видеокамеры вычитают высоту подвеса пластины ГРЗ на транспортном средстве, после этого рассчитывают географические координаты ТС с учетом известных географических координат видеокамеры, предварительно измеренного утла отклонения видеокамеры от направления севера и известного расстояния от точки проекции видеокамеры на дорогу до точки проекции центра пластины ГРЗ ТС на дорогу.
2. Способ по п. 1, отличающийся тем, что высоту подвеса пластины ГРЗ на транспортном средстве принимают равной от 20 до 100 см.
3. Способ по п. 2, отличающийся тем, что высоту подвеса пластины ГРЗ на транспортном средстве принимают равной 40 см.
4. Способ по п. 1, отличающийся тем, что сканирование зоны контроля осуществляют по заранее настроенным точкам в пространстве.
5. Способ по п. 1, отличающийся тем, что географические координаты ТС определяют для каждого видеокадра, на котором зафиксировано ГРЗ данного ТС.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2010 |
|
RU2445576C1 |
| СПОСОБ РЕГИСТРАЦИИ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ | 2012 |
|
RU2493604C1 |
| СПОСОБ ТЕЛЕМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ И ФИКСАЦИИ СКОРОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2486598C1 |
| KR 101307234 B1, 11.09.2013. | |||

