Изобретение относится к контрольно-измерительной технике и может использоваться для контроля движения на дорогах, для контроля нарушения скоростного режима транспортными средствами и др.
Известны методы, широко используемые в настоящее время дорожно-патрульной службой, основанные на зондировании участка автотрассы с помощью радиолокатора. По изменению параметров отраженного от движущегося транспортного средства (ТС) сигнала, например по изменению частоты, определяют скорость ТС [1].
Однако этот метод не позволяет идентифицировать транспортное средство, т.е. не позволяет распознать номер госрегистрации автомобиля и, следовательно, определить его принадлежность владельцу.
Для распознавания номера госрегистрации транспортного средства, нарушившего скоростной режим, применяется метод с использованием видеокамер, устанавливаемых на дорогах на пути движения транспорта.
Известен способ определения скорости ТС, выбранный в качестве прототипа [2]. Способ включает излучение в направлении движущихся по участку дорожного полотна ТС импульсов электромагнитного излучения, прием импульсов отраженного электромагнитного излучения, скорости движения ТС путем сравнения параметров излученных и принятых импульсов и сравнение измеренной скорости ТС с максимально разрешенной на данном участке с последующими формированием, в случае регистрации превышения скорости, сигнала для распознавания государственного регистрационного знака нарушающего ТС с помощью видеокамеры распознавания государственного регистрационного знака, идентификацией ТС и автоматической регистрацией нарушений скоростного режима, импульсы радиолокатора излучают синхронно с видеосъемкой того же участка дорожного полотна видеокамерой панорамного обзора, вычисляют координаты и скорости транспортных средств, находящихся в кадре, после чего сравнивают получаемые независимо друг от друга посредством радиолокатора и видеокамеры панорамного обзора потоки данных, содержащие значения скоростей и координат всех ТС, находящихся в текущий момент на выбранном участке дорожного полотна, причем для получения метрологически достоверных данных о скоростях и координатах ТС используют данные радиолокатора, а за достоверные данные о координатах тех же ТС принимают данные, полученные от видеокамеры панорамного обзора, каждому ТС, нарушающему скоростной режим, обеспечивают дальнейшее сопровождение до момента распознавания государственного регистрационного знака, затем видеокамерой распознавания государственного регистрационного знака формируют кадр изображения ТС-нарушителя с распознанным государственным регистрационным знаком, датой, временем, зафиксированной скоростью и идентификатором видеокамеры, что позволяет осуществлять автоматическую регистрацию нарушений правил дорожного движения.
Однако такой метод, как описано выше, требует использования отдельной аппаратуры для измерения скорости и распознавания номерного знака.
Технической задачей данного изобретения является создание метода измерения скорости транспортных средств, движущихся в плотном потоке, с однозначной привязкой значения измеренной скорости к ТС. Поскольку данный метод основан на использовании только одного вида аппаратуры - видеокамеры, как для распознавания номера, так и для измерения скорости, он позволяет упростить и удешевить систему для его реализации.
Поставленная задача достигается тем, что в способе определения скорости транспортного средства, заключающемся в том, что на пути движения транспортного средства (ТС) размещают видеокамеру, фиксируют видеокадры с изображением пластины государственного регистрационного знака (ГРЗ) ТС при перемещении его в зоне контроля видеокамеры и определяют значение скорости ТС за время пересечения им зоны контроля видеокамеры, согласно изобретению предварительно измеряют параметры расположения видеокамеры относительно плоскости дороги, запоминают видеокадры, полученные в начале и в конце зоны контроля видеокамеры, измеряют координаты точек углов и центра пластины ГРЗ в системе координат видеокадра в начале и в конце зоны контроля, преобразуют координаты точек углов и центра пластины ГРЗ из системы координат видеокадров в систему координат дороги с учетом параметров расположения видеокамеры относительно плоскости дороги, определяют направление перемещения пластины ГРЗ в системе координат дороги по точкам центра пластины ГРЗ в начале и в конце зоны контроля, корректируют размеры видимого изображения пластины ГРЗ на видеокадрах с учетом направления перемещения пластины ГРЗ, сравнивают скорректированные размеры пластины ГРЗ со стандартными значениями размеров пластины ГРЗ и по результатам сравнения определяют высоту, на которой перемещается точка центра пластины ГРЗ относительно плоскости дороги, преобразуют координаты точек углов и центра пластины ГРЗ из системы координат видеокадра в систему координат дороги в плоскость, параллельную плоскости дороги и расположенную на высоте перемещения точки центра пластины ГРЗ, определяют величину перемещения точки центра пластины ГРЗ в указанной плоскости, по найденной величине перемещения точки центра пластины ГРЗ и времени, за которое было совершено это перемещение, определяют скорость транспортного средства.
Так как обычно действия по фиксации нарушения скоростного режима ТС включают измерение скорости - выявление нарушения - распознавание номера ТС - формирование постановления и квитанции для оплаты штрафа, то очевидно, что реализация функций распознавания номера и измерения скорости ТС с помощью одного устройства позволит достичь поставленных целей и устранить недостатки, присущие традиционным системам.
Предлагаемый способ поясняется фиг.1-9.
Способ определения скорости транспортного средства осуществляется следующим образом.
Способ реализуется следующим образом. Сначала осуществляется распознавание номеров ТС с помощью видеокамеры. Предварительно измеряются параметры положения видеокамеры в пространстве относительно автодороги, на которой требуется измерять скорость ТС. Далее, при движении ТС в зоне контроля видеокамеры, формируются и фиксируются два видеокадра - фотоизображения ТС - в начале и в конце зоны контроля. По этим видеокадрам осуществляется распознавание номера государственного регистрационного знака (ГРЗ) ТС, а также определяются геометрические параметры пластины ГРЗ в системе координат видеокадра (координаты точек углов и центра пластины, искажения формы пластины ГРЗ от правильного прямоугольника), измеряют координаты точек углов и центра пластины ГРЗ в системе координат видеокадра в начале и в конце зоны контроля, преобразуют координаты точек углов и центра пластины ГРЗ из системы координат видеокадров в систему координат дороги с учетом параметров расположения видеокамеры относительно плоскости дороги, определяют направление перемещения пластины ГРЗ в системе координат дороги по точкам центра пластины ГРЗ в начале и в конце зоны контроля, корректируют размеры видимого изображения пластины ГРЗ на видеокадрах с учетом направления перемещения пластины ГРЗ, сравнивают скорректированные размеры пластины ГРЗ со стандартными значениями размеров пластины ГРЗ и по результатам сравнения определяют высоту, на которой перемещается точка центра пластины ГРЗ относительно плоскости дороги, преобразуют координаты точек углов и центра пластины ГРЗ из системы координат видеокадра в систему координат дороги в плоскость, параллельную плоскости дороги и расположенную на высоте перемещения точки центра пластины ГРЗ, определяют величину перемещения точки центра пластины ГРЗ в указанной плоскости, по найденной величине перемещения точки центра пластины ГРЗ и времени, за которое было совершено это перемещение, определяют скорость транспортного средства.
Для определения скорости ТС необходимо определить путь, пройденный ТС, и время, за которое ТС прошло данный путь. Видеокамера фиксирует проезд ТС в зоне контроля - не менее 2-х видеокадров, на которых изображено ТС с номерным знаком. Для каждого видеокадра фиксируется время его формирования, т.е. время пребывания ТС в данной точке. Чтобы определить путь, пройденный ТС по дороге, необходимо взять опорную точку ТС на видеокадре в начальный и в конечный момент времени, пересчитать ее координаты из системы координат кадра в систему координат дороги и найти расстояние между этими точками в системе координат дороги. В качестве опорной точки принимается центр номерной пластины - это точка, координаты которой можно определить с высокой точностью. Для преобразования координат из системы координат кадра в систему координат дороги необходимо знать взаимное расположение видеокамеры и пластины ГРЗ.
ТС с пластиной ГРЗ движется по дороге, которая может иметь как продольный, так и поперечный уклон. ТС может двигаться не строго вдоль полосы, а под некоторым углом, наискосок. Пластина может быть закреплена на ТС на различной высоте над дорогой, может находиться не на фронтальной плоскости ТС, а также иметь другие особенности крепления на ТС. Сама камера имеет некоторый уклон к плоскости дороги, к тому же она может быть установлена не строго над центром полосы движения, а немного сбоку, под углом к линии движения ТС в горизонтальной плоскости. Кроме того, при монтаже может возникнуть «крен» камеры - не строго вертикальная установка, а под некоторым углом к вертикали. Все это необходимо учитывать для корректного преобразования координат.
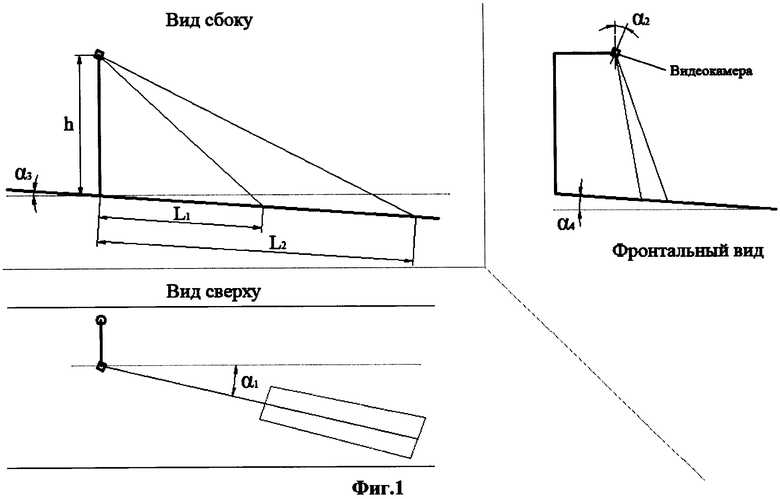
1. Предварительно измеряют следующие параметры расположения камеры относительно плоскости дороги (см. фиг.1):
- высота h подвеса камеры над дорогой (фиг.1, п.1);
- расстояние L1 от точки проекции видеокамеры на дорогу до начала зоны контроля (фиг.1, п.2);
- расстояние L2 от точки проекции камеры на дорогу до конца зоны контроля (фиг.1, п.3);
- угол α1 поворота камеры в горизонтальной плоскости от линии направления дороги (фиг.1 п.4);
- угол α2 «крена» камеры - отклонение от вертикали (фиг.1, п.5);
- угол α3 продольного уклона дороги (фиг.1, п.6);
- угол α4 поперечного уклона дороги (фиг.1, п.7).
2. Для каждого ТС, проезжающего зону контроля камеры, фиксируют не менее двух видеокадров с изображением ТС и госномера ТС в начале и в конце зоны контроля. Видеокадров для данного ТС может быть несколько, для дальнейших расчетов выбираются два, на которых номерная пластина проходит максимальный путь - видеокадры с номерной пластиной в начале и в конце зоны контроля (см. фиг 2).
3. Измеряют координаты углов пластины ГРЗ в системе координат видеокадра в начале и в конце зоны контроля. Видеокадр, отображающий зону контроля, имеет размеры Vx пикселей по ширине и Vy пикселей по высоте. Значения Vx и Vy нам известны как параметры матрицы видеокамеры. Точку начала координат расположим в левом верхнем углу кадра, ось X направим по ширине видеокадра вправо, ось Y направим по высоте видеокадра вниз.
- Первый кадр:
- опорная точка (центр пластины) Tl (X1; Y1);
- левый нижний угол пластины T1л (Х1л; Y1л);
- правый нижний угол пластины T1пр (X1 пр; Y1 пр);
- Последний кадр:
- опорная точка (центр пластины) Т2 (Х2; Y2);
- левый нижний угол пластины Т2л (Х2л; Y2л);
- правый нижний угол пластины Т2пр (Х2 пр; Y2 пр).
4. Преобразуют координаты точек пластины ГРЗ из системы координат видеокадра в систему координат дороги.
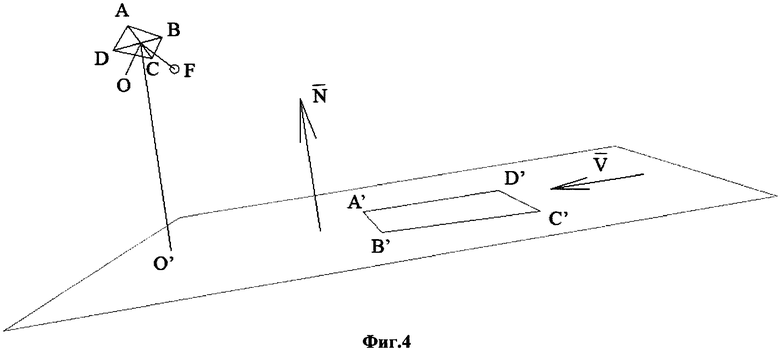
Изображение на видеокадре - это изображение, полученное от матрицы камеры. Преобразование любой точки дороги в зоне контроля камеры на матрицу камеры происходит по законам оптики в соответствии с фиг.3. Чтобы преобразовать точку видеокадра в точку на дороге, необходимо знать параметры взаимного расположения плоскости дороги и плоскости матрицы камеры. В трехмерной системе координат дороги зададим координаты матрицы камеры и плоскость дороги. С учетом параметров, измеренных в п.1, скорректируем взаимное расположение матрицы и дороги, используя аффинные преобразования (поворот и перенос). В результате будут получены координаты углов матрицы A, B, С и D, координата точки фокуса F, координаты плоскости дороги в векторном виде N, расстояние от плоскости дороги до центра матрицы ОО' (см. фиг.4). Эти данные являются необходимым и достаточным условием для преобразования координат любой точки зоны контроля A'B'C'D' в координаты матрицы ABCD и обратно.
5. Определяют направление движения пластины в системе координат дороги.
Зная координаты пластины в начале и в конце зоны контроля в плоскости дороги, определяем направление вектора движения пластины в плоскости дороги.
6. Корректируют размеры видимого изображения номерной пластины на видеокадре с учетом направления движения ТС.
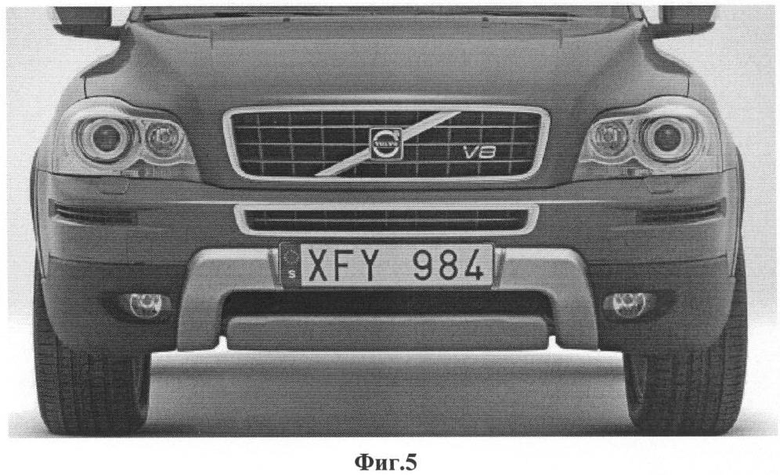
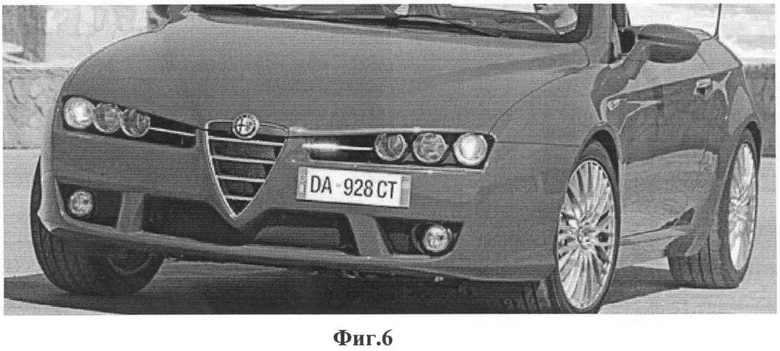
У большинства ТС пластина ГРЗ закреплена в плоскости, перпендикулярной направлению движения, и с горизонтальной нижней гранью (см. фиг.5). Однако на некоторых ТС пластина ГРЗ может быть закреплена иначе, что может привести к ошибке при вычислении ширины пластины ГРЗ. Пластина может быть закреплена под углом в любой плоскости и даже с деформацией (см фиг.6, 7, 8 и 9). Необходимо корректировать нестандартное крепление пластины ГРЗ. Для этого в системе координат дороги помещаем 4 точки, соответствующие углам пластины, закрепленной стандартно. Используя аффинные преобразования из п.4 (преобразования из системы координат дороги в систему координат видеокадра) получаем параметры пластины (координаты углов, вид граней) при стандартном креплении в системе координат видеокадра. Сравнивая полученные параметры пластины при стандартном креплении с параметрами пластины в начале и в конце зоны контроля, делаем вывод о характере крепления пластины и корректируем ширину номерной пластины с учетом нестандартного крепления.
7. Сравнивают скорректированные размеры пластины ГРЗ со стандартными значениями размеров пластины и определяют высоту, на которой движется пластина относительно плоскости дороги.
Зная скорректированную видимую ширину пластины на видеокадре (из п.6), а также реальную ширину стандартной пластины ГРЗ (размеры пластины берутся из справочных данных для типа распознанного ГРЗ), используя свойства подобных треугольников, определяем высоту, на которой пластина закреплена на ТС:
Нпл=Нк·(1-a/b),
где Нпл - высота точки центра пластины ГРЗ над плоскостью дороги;
Нк - расстояние от камеры до плоскости дороги;
a - стандартная ширина пластины ГРЗ (из описания типа ГРЗ);
b - скорректированная ширина пластины ГРЗ на видеокадре.
8. С учетом высоты движения номерной пластины преобразуют координаты точек пластины из системы координат видеокадра в систему координат дороги на высоту движения пластины.
Используя аффинные преобразования (п.4), переносят координаты точек пластины в начале и в конце зоны контроля из системы координат видеокадра в систему координат дороги, в плоскость на высоте движения пластины. Для этого предварительно вводят дополнительную плоскость - это плоскость, полученная переносом плоскости дороги вдоль своей нормали на расстояние, равное высоте движения пластины в сторону матрицы видеокамеры.
9. В плоскости движения номерной пластины определяют значение перемещения пластины.
Зная координаты пластины в начале и в конце зоны контроля в системе координат дороги в плоскости на высоте движения пластины (из п.8), определяем вектор движения номерной пластины. Длина данного вектора - это путь, пройденный номерной пластиной в зоне контроля.
10. По перемещению пластины и по времени, за которое было совершено это перемещение, определяют скорость перемещения пластины, а следовательно, и скорость ТС.
Зная путь S, пройденный пластиной (из п.9), и время ДТ, за которое был пройден этот путь (как разница между временем последнего кадра и временем первого кадра), определяют скорость пластины в зоне контроля:
V=S/ΔT.
А т.к. пластина жестко закреплена на ТС, то скорость пластины и будет являться скорость ТС в зоне контроля.
Источники информации
1. Пат RU 2237266.
2. Пат.RU 32382416 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ОТ ВИДЕОКАМЕРЫ ИЗМЕРИТЕЛЯ СКОРОСТИ ДО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2011 |
|
RU2470376C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ФИКСАЦИИ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ И ПРАВИЛ ПАРКОВКИ ТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2014 |
|
RU2578651C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОРОГЕ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2559418C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2580332C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2442218C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2579645C1 |
| Универсальный способ фотофиксации нарушений ПДД | 2019 |
|
RU2749941C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ДОРОЖНОГО ДВИЖЕНИЯ И СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2021 |
|
RU2760058C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА ПРИ ПОМОЩИ КАМЕРЫ (ВАРИАНТЫ) | 2014 |
|
RU2602729C2 |
| Способ определения траектории движения автомобиля по видео для выявления нарушений правил дорожного движения | 2020 |
|
RU2746057C1 |



Изобретение относится к контрольно-измерительной технике и может использоваться для контроля движения на дорогах, для контроля нарушения скоростного режима транспортными средствами (ТС), движущимися в плотном потоке, с однозначной привязкой значения измеренной скорости к ТС. Согласно предложенному способу фиксируют видеокадры с изображением пластины государственного регистрационного знака (ГРЗ) ТС при перемещении его в зоне контроля видеокамеры и дополнительно измеряют параметры расположения видеокамеры относительно плоскости дороги. Измеряют координаты точек углов и центра пластины ГРЗ в системе координат видеокадра в начале и в конце зоны контроля и определяют направление перемещения пластины ГРЗ в системе координат дороги по точкам центра пластины ГРЗ в начале и в конце зоны контроля. Далее определяют величину перемещения точки центра пластины ГРЗ в плоскости, параллельной плоскости дороги, расположенной на высоте перемещения точки центра пластины ГРЗ. По указанной величине перемещения и времени, за которое было совершено это перемещение, определяют скорость ТС. Способ позволяет упростить и удешевить систему для его реализации, поскольку требует только одного вида аппаратуры - видеокамеры, как для распознавания номера, так и для измерения скорости ТС. 9 ил.
Способ определения скорости транспортного средства (ТС), заключающийся в том, что на пути движения ТС размещают видеокамеру и фиксируют видеокадры с изображением пластины государственного регистрационного знака (ГРЗ) ТС при перемещении его в зоне контроля видеокамеры, отличающийся тем, что предварительно измеряют параметры расположения видеокамеры относительно плоскости дороги, запоминают видеокадры, полученные в начале и в конце зоны контроля видеокамеры, определяют временной интервал между первым и последним видеокадрами, измеряют координаты точек углов и центра пластины ГРЗ в системе координат видеокадра в начале и в конце зоны контроля, преобразуют координаты точек углов и центра пластины ГРЗ из системы координат видеокадров в систему координат дороги с учетом параметров расположения видеокамеры относительно плоскости дороги, определяют направление перемещения пластины ГРЗ в системе координат дороги по координатам точек центра пластины ГРЗ в начале и в конце зоны контроля, корректируют размеры видимого изображения пластины ГРЗ на видеокадрах с учетом направления перемещения пластины ГРЗ, сравнивают скорректированные размеры пластины ГРЗ со стандартными значениями размеров пластины ГРЗ и по результатам сравнения определяют высоту, на которой перемещается точка центра пластины ГРЗ относительно плоскости дороги, преобразуют координаты точек углов и центра пластины ГРЗ из системы координат видеокадра в систему координат дороги в плоскости, параллельной плоскости дороги и расположенной на высоте перемещения точки центра пластины ГРЗ, определяют величину перемещения точки центра пластины ГРЗ в указанной плоскости, по найденной величине перемещения точки центра пластины ГРЗ и времени, за которое было совершено это перемещение, соответствующему временному интервалу между первым и последним видеокадрами, определяют скорость ТС.
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ С ПОСЛЕДУЮЩЕЙ ИХ ИДЕНТИФИКАЦИЕЙ И АВТОМАТИЧЕСКОЙ РЕГИСТРАЦИЕЙ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2382416C2 |
| US 2009207046 A1, 20.08.2009 | |||
| CN 101577050 А, 11.11.2009 | |||
| ЕР 1486928 А2, 15.12.2004. | |||

