Предлагаемое изобретение относится к области вычислительной техники и автоматизированных систем управления, в первую очередь к области средств управления мобильными роботами и беспилотными летательными аппаратами, обеспечивающих управление движением аппарата на основе обработки данных, полученных от присоединенных к устройству технических средств, таких как видеокамеры, микрофоны, датчики различных физических параметров аппарата и его окружающей среды.
В качестве ближайшего аналога предлагаемого изобретения выбрано устройство - контроллер, предназначенный для управления движением робота, описанное в патенте US 2006279246 А1, опубликован 14.12.2006 г. Известное из US 2006279246 А1 устройство включает центральный процессор, к которому подключены запоминающее устройство с произвольным доступом и контроллер процессора; а к контроллеру процессора подключены устройство управления сервоприводами, устройство управления связью, устройство управления периферийным оборудованием и запоминающее устройство с последовательным доступом. Известное устройство с очевидностью может быть использовано для управления практически в любых киберфизических системах, включающих множество отдельных объектов, либо для управления отдельным киберфизическим объектом. При этом единственным узлом контроллера, определяющим алгоритмы управления, является центральный процессор, а все прочие устройства, входящие в состав контроллера, обеспечивают обработку данных и взаимодействие с периферийным оборудованием по заранее определенным (неизменяемым) протоколам. Очевидным недостатком данного устройства является недостаточное быстродействие и ограниченное качество управления объектами в условиях, требующих анализа больших объемов данных, принимаемых сенсорами, в совокупности с высокой скоростью и динамикой управления подвижными объектами, такими как беспилотные летательные аппараты, мобильные роботы, движущиеся в иных средах, иные сложные киберфизические объекты, образующие системы. В свою очередь предлагаемое изобретение позволит устранить указанные недостатки и позволит предложить устройство управления в киберфизических системах разного уровня сложности, отличающееся надежностью управления, быстродействием, а также позволяющее использовать для управления объектами (совокупностями объектов) алгоритмы высокой вычислительной сложности.
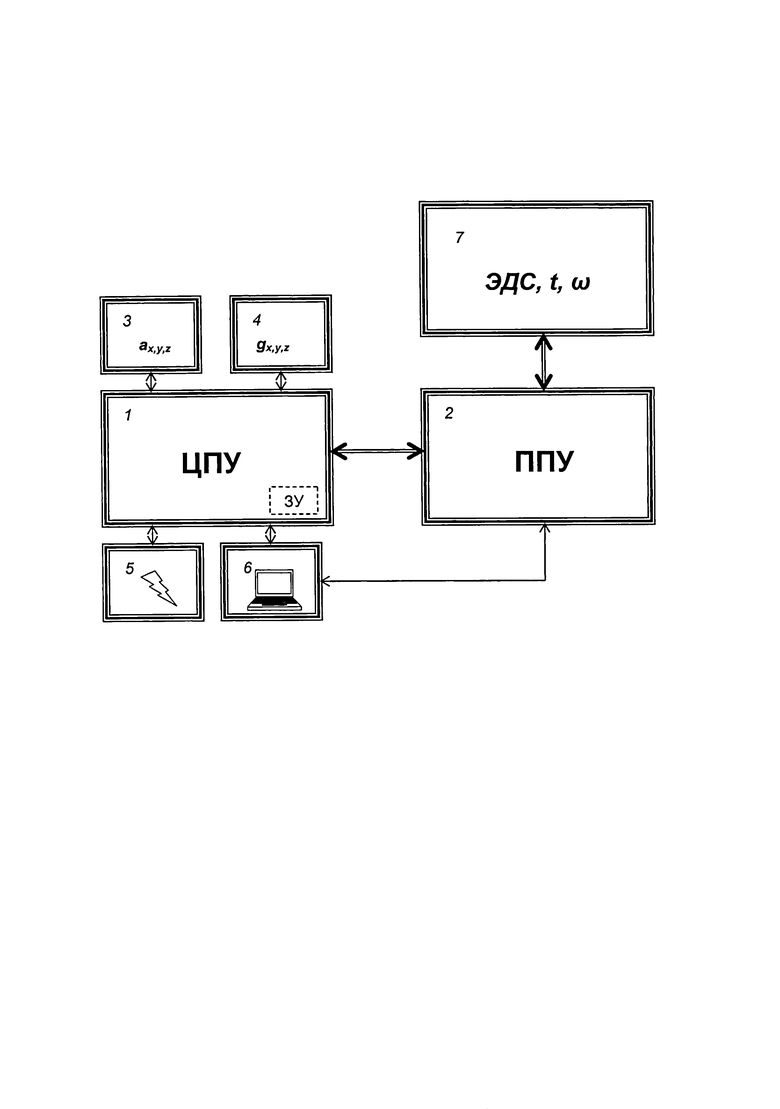
Указанный выше технический результат достигается при использовании предложенного устройства управления в киберфизических системах/управления отдельными киберфизическими системами - киберфизическими объектами, например мобильными роботами и/или беспилотными летательными аппаратами. Предложенное устройство включает центральный процессор, к которому подключены запоминающее устройство; 3-осевой акселерометр и/или 3-осевой гироскоп; интерфейс внешних устройств и пользовательский интерфейс. В отличие от известных решений, в состав устройства введен периферийный процессор, подключенный к центральному процессору, и интерфейс контроля оборудования объекта управления, подключенный к периферийному процессору, при этом пользовательский интерфейс подключен к центральному и периферийному процессору. Интерфейс контроля оборудования объекта управления включает средства, выбранные из перечня, содержащего, по меньшей мере: средства управления электрическими двигателями; средства управления электрическими приводами; средства контроля датчиков угловой скорости (энкодеров); средства контроля датчиков электромагнитных величин; средства контроля датчиков термодинамических величин; средства контроля датчиков пространственного положения. Интерфейс внешних устройств включает средства, выбранные из перечня, содержащего, по меньшей мере: средства подключения и контроля периферийных устройств; средства подключения и контроля датчиков; средства подключения контроллеров; средства подключения компьютера; средства приема видеосигнала; средства приема звукового сигнала. Пользовательский интерфейс включает средства, выбранные из перечня, содержащего, по меньшей мере: дисплей; оборудование световой и/или звуковой индикации; средства WiFi/Bluetooth. Периферийный процессор включает средства контроля потребления электрической энергии объектами управления.
Предложенное устройство включает центральный процессор 1 с запоминающим устройством (оперативная память, флэш память, SD карта), к которому подключены (с которым электрически соединены) периферийный процессор 2, 3-осевой акселерометр 3, 3-осевой гироскоп 4; интерфейс внешних устройств 5 и пользовательский интерфейс 6. К периферийному процессору 2 подключен интерфейс контроля оборудования объекта управления 7, пользовательский интерфейс 6 подключен к центральному 1 и периферийному 2 процессору. Акселерометр 3 и гироскоп 4 позволяют процессору 1 определять положение и траекторию движения устройства в пространстве без подключения внешних устройств. Для электрического питания устройства могут быть использованы источники постоянного тока и аккумуляторы.
Средства интерфейса внешних устройств 5 могут включать различное аппаратное оборудование, обеспечивающее подключение и контроль периферийных устройств (таймеры, порты сигнала широтно-импульсной модуляции, сигнальные порты, слоты расширения, USB порты и т.п.); подключение и контроль датчиков (энкодеры и т.п.); подключение внешних контроллеров; подключение компьютера либо иных программируемых терминалов (UART порт и т.п.); прием видеосигнала и звукового сигнала от внешних устройств.
Пользовательский интерфейс 6 может включать дисплей; оборудование световой и/или звуковой индикации; средства WiFi/Bluetooth, клавиатуру и т.п. Конкретный выбор оборудования интерфейса внешних устройств 5 и пользовательского устройства будет определяться особенностями назначения и конструкции того или иного киберфизического объекта. Оператор (пользователь) может удаленно управлять устройством с компьютера либо мобильного устройства по интерфейсу BlueTooth, а также по сети Ethernet с использованием беспроводного интерфейса WiFi. Возможно локальное управление устройством клавишами и с помощью сенсорного экрана, клавиши программируются пользователем.
Выделенный периферийный процессор 2 обеспечивает управление различными средствами интерфейса контроля 7, то есть позволяет, как высвободить ресурсы центрального процессора 1 для выполнения ресурсоемких алгоритмов анализа всей совокупности данных, принятых контроллером, так и обеспечить высокую динамику оперативного управления объектами на основе мгновенных значений параметров, измеряемых датчиками физических величин. Также периферийный процессор включает средства контроля потребления электрической энергии объектами управления и защиты объектов управления от превышения допустимых уровней тока. Распределение функций контроля между двумя процессорами позволит использовать для управления киберфизическими объектами достаточно сложные алгоритмы управления, не ухудшая при этом время реакции системы на внешние события и изменения параметров окружающей среды. Средства интерфейса контроля оборудования объекта управления 7 могут включать различное аппаратное оборудование/отдельные блоки и/или участки памяти такого, обеспечивающее управление электрическими двигателями и/или приводами (силовые драйверы электрических двигателей, ограничители силы тока); средства контроля датчиков угловой скорости (энкодеров); средства контроля датчиков электромагнитных величин (направления и напряженности электромагнитного поля и т.п.); средства контроля датчиков термодинамических величин (температуры, давления и т.п.); средства контроля датчиков пространственного положения (угла поворота и т.п.). Конкретный набор средств интерфейса контроля 7 будет определяться особенностями назначения и конструкции беспилотного летательного аппарата, робота и т.п. киберфизического объекта.
Работа предложенного устройства для управления киберфизическим системами и объектами может быть пояснена через описание отдельных подсистем, образующих данное устройство. Данные подсистемы представляют собой совокупности участков памяти центрального 1 и периферийного 2 процессора и различного оборудования, обеспечивающего исполнение различных функций.
Предложенное устройство управления в киберфизических системах/управления отдельными киберфизическими системами - киберфизическими объектами включает подсистемы: центральная подсистема общего управления; подсистема сбора и анализа видеоинформации (технического зрения); подсистема сбора и анализа звуковой информации, а также вывода звуковой информации; подсистема сбора и анализа информации аналоговых и цифровых сенсоров; подсистема локальной радиосвязи; подсистема локального управления; подсистема взаимодействия с устройствами навигации, дальней радиосвязи и радиолокации; подсистема хранения и регистрации данных; подсистема управления электроприводами и двигателями аппарата-носителя; подсистема автономного электропитания.
Центральная подсистема общего управления обеспечивает централизованное управление всеми подсистемами контроллера и выполнение алгоритмов интеллектуального анализа данных, полученных от подсистем ввода, и адаптивную коррекцию управления на основе этого анализа. Благодаря работе центральной подсистемы обеспечивается стабилизация в пространстве для мобильных роботов и беспилотных летательных аппаратов, а также для подвижных объектов, не обладающих статической устойчивостью (классические вертолеты с единственным несущим винтом, шагающие роботы, двухколесные самодвижущиеся платформы (сегвеи) и т.п.).
Подсистема сбора и анализа видеоинформации (технического зрения) обеспечивает ориентацию в пространстве аппарата-носителя, в совокупности с информацией, полученной из других каналов ввода и анализа данных, либо независимо от них. Объект достоверно идентифицируется по заданным визуальным шаблонам, а также определяется его относительное положение в пространстве за счет использования двух параллельных каналов видеоввода и алгоритмов их совместной обработки. Обеспечивается фильтрация и сжатие видеоинформации для дальнейшей передачи по радиоканалу и/или регистрации на встроенном носителе.
Подсистема сбора и анализа звуковой информации, а также последующего вывода звуковой информации обеспечивает достоверную идентификацию объектов по заданным звуковым шаблонам с использованием 2-х параллельных каналов звукового ввода, в совокупности с информацией, полученной из других каналов ввода и анализа данных, либо независимо от них. Также обеспечивается вывод звуковых сигналов по заданной программе, в том числе для обмена информацией с идентифицированным объектом.
Подсистема сбора и анализа информации аналоговых и цифровых сенсоров обеспечивает сбор и анализ навигационной и телеметрической информации от встроенного 3-осевого акселерометра, гироскопа, внешних навигационных и измерительных систем аппарата-носителя.
Подсистема локальной радиосвязи обеспечивает интерактивное взаимодействие с пользователем в зоне действия беспроводных точек доступа стандартов WiFi и BlueTooth, в том числе посредством сети Интернет.
Подсистема локального управления обеспечивает интерактивное взаимодействие с пользователем, в том числе вне зоны доступа сетей локальной радиосвязи, с помощью кнопок на лицевой панели прибора и сенсорного экрана.
Подсистема взаимодействия с устройствами навигации, дальней радиосвязи и радиолокации обеспечивает ориентацию в пространстве аппарата-носителя, в совокупности с информацией, полученной из других каналов ввода и анализа данных, либо независимо от них. Также обеспечивается удаленное взаимодействие с пользователем по каналам сотовой и дальней радиосвязи с помощью внешних подсистем (при их наличии в составе аппарата-носителя).
Подсистема хранения и регистрации данных обеспечивает хранение программы управления аппаратом, включая исполняемые машинные коды всех бортовых подсистем. Одновременно, по заданной программе обеспечивается регистрация аудиовизуальной и телеметрической информации, полученной в процессе автономной работы системы, на съемном энергонезависимом носителе.
Подсистема управления электроприводами и двигателями аппарата-носителя обеспечивает автономное управление электроприводами и двигателями на основе команд и параметров управления, вырабатываемых центральной подсистемой общего управления. Также подсистема управления электроприводами и двигателями аппарата-носителя обеспечивает режим поэтапной доставки аппарата или полезного груза к заданному объекту, с преодолением одних частей маршрута в режиме беспилотного летательного аппарата и других частей маршрута - в режиме мобильного (колесного, гусеничного или шагающего) робота. Преимущества режима поэтапной доставки выражаются в ослаблении ограничений по времени работы системы в автономном режиме, а также в увеличении возможностей доставки аппарата к труднодоступным объектам.
Подсистема автономного электропитания обеспечивает электропитание всех подсистем контроллера от низковольтных батарей постоянного тока, параметры которых могут варьироваться в зависимости от конструктивных и технических требований, предъявляемых к управляемому аппарату в целом.
В результате совместной работы перечисленных подсистем и описанных выше аппаратных средств при работе предложенного устройства выполняется определение и ввод пользователем программы управления аппаратом с помощью подключаемого компьютера либо элементов локального управления, в том числе в полевых условиях без использования внешних устройств и каналов связи. Обеспечивается автономное выполнение задачи перемещения аппарата-носителя в заданный район местности с последующим возвратом. Выполняется поиск по совокупности идентифицирующих признаков неподвижного либо мобильного объекта в этом районе с поиском места на заданном расстоянии от неподвижного либо мобильного объекта, обеспечивающего безопасное приземление беспилотного летательного аппарата с учетом его технических характеристик, и управление его приземлением. Производится достоверная идентификация заданного объекта по совокупности характеристик, определяемых с помощью визуального канала, звукового канала, дополнительных каналов измерений, предоставляемых сенсорами и прочими внешними устройствами. Обеспечивается физическое либо информационное взаимодействие с заданным объектом после его идентификации с передачей аудиовизуальной и телеметрической информации по каналам радиосвязи в режиме «прямого эфира», а также ее регистрация на встроенном энергонезависимом носителе.
Таким образом, предложено устройство управления в киберфизических системах/управления отдельными киберфизическими системами - киберфизическими объектами, отличающееся надежностью управления, быстродействием, а также позволяющие использовать для управления алгоритмы высокой вычислительной сложности.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2019 |
|
RU2717047C1 |
| Комплекс распределенного управления интеллектуальными роботами для борьбы с беспилотными аппаратами | 2024 |
|
RU2838977C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ИНЖЕНЕРНОГО ОБЕСПЕЧЕНИЯ, АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ, СВЯЗИ И ЭЛЕКТРОПИТАНИЯ (КСИАС) | 2010 |
|
RU2445693C1 |
| Многофункциональный центр управления движением и моделирования динамики летательных аппаратов | 2017 |
|
RU2646784C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| КОМПЛЕКС СРЕДСТВ ВИДЕОНАБЛЮДЕНИЯ И СВЯЗИ МОБИЛЬНОГО ПУНКТА УПРАВЛЕНИЯ | 2011 |
|
RU2468522C1 |
| Интегрированная система безопасности на основе автоматизированных функциональных систем и подсистем | 2022 |
|
RU2794559C1 |
| КОМПЛЕКСНАЯ СИСТЕМА МОНИТОРИНГА, КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ СИСТЕМАМИ ЖИЗНЕОБЕСПЕЧЕНИЯ И БЕЗОПАСНОСТИ АВТОНОМНЫХ ОБЪЕКТОВ | 2022 |
|
RU2779017C1 |
| Универсальный комплекс распределенного управления интеллектуальными роботами для борьбы с малогабаритными беспилотными летательными аппаратами | 2023 |
|
RU2817740C1 |
| КОМПЛЕКС ПРОГРАММНО-ТЕХНИЧЕСКИХ СРЕДСТВ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ ОПОВЕЩЕНИЯ В ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЯХ | 2024 |
|
RU2837812C1 |
Изобретение относится к автоматизированным системам. Технический результат заключается в повышении надежности связи между устройствами. Устройство содержит: центральный процессор, к которому подключены запоминающее устройство, 3-осевой акселерометр и/или 3-осевой гироскоп, интерфейсы внешних устройств, пользовательский интерфейс и периферийные процессоры, причем выделенные периферийные процессоры выполнены с возможностью управления средствами контроля, включая средства контроля потребления электрической энергии объектами управления и защиты объектов управления от превышения допустимых уровней тока, при этом к периферийным процессорам дополнительно подключен пользовательский интерфейс и интерфейс контроля оборудования. 7 з.п. ф-лы, 1 ил.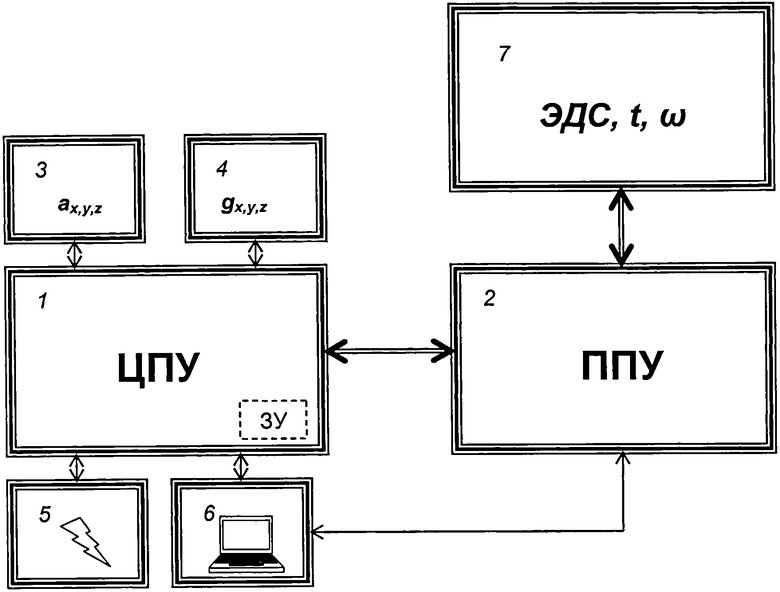
1. Устройство управления объектами при распределении функций управления и адаптивной коррекции между центральным и периферийными процессорами в киберфизических системах, характеризующееся тем, что оно включает центральный процессор, к которому подключены запоминающее устройство, 3-осевой акселерометр и/или 3-осевой гироскоп, интерфейсы внешних устройств, пользовательский интерфейс и периферийные процессоры, причем выделенные периферийные процессоры выполнены с возможностью управления средствами контроля, включая средства контроля потребления электрической энергии объектами управления и защиты объектов управления от превышения допустимых уровней тока, при этом к периферийным процессорам дополнительно подключен пользовательский интерфейс и интерфейс контроля оборудования.
2. Устройство по п. 1, отличающееся тем, что интерфейс контроля оборудования объекта управления включает средства, выбранные из перечня, содержащего, по меньшей мере:
средства управления электрическими двигателями;
средства управления электрическими приводами;
средства контроля датчиков угловой скорости (энкодеров);
средства контроля датчиков электромагнитных величин;
средства контроля датчиков термодинамических величин;
средства контроля датчиков пространственного положения.
3. Устройство по п. 1, отличающееся тем, что интерфейс внешних устройств включает средства, выбранные из перечня, содержащего, по меньшей мере:
средства подключения и контроля периферийных устройств;
средства подключения и контроля датчиков;
средства подключения контроллеров;
средства подключения компьютера;
средства приема видеосигнала;
средства приема звукового сигнала.
4. Устройство по п. 1, отличающееся тем, что пользовательский интерфейс включает средства, выбранные из перечня, содержащего, по меньшей мере:
дисплей;
оборудование световой и/или звуковой индикации;
средства беспроводной связи.
5. Устройство по п. 1, отличающееся тем, что каждый периферийный процессор включает средства контроля допустимых режимов эксплуатации устройства и подключенного к нему оборудования объекта управления.
6. Устройство по п. 1, отличающееся тем, что пользовательский интерфейс и/или интерфейс внешних устройств подключен к центральному и периферийному процессору.
7. Устройство по п. 1, отличающееся тем, что включает несколько периферийных процессоров, подключенных к центральному процессору и интерфейсов контроля оборудования объектов управления, подключенных к периферийным процессорам.
8. Устройство по любому из предшествующих пунктов, отличающееся тем, что предназначено для управления мобильными роботами и/или беспилотными летательными аппаратами.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

