Настоящее изобретение относится к устройству конвейерной транспортировки, имеющему по меньшей мере один конвейер непрерывного действия, содержащий конвейерные элементы, предназначенные для людей и/или объектов, согласно с определением в независимых пунктах формулы.
Документ WO 2004/014774 раскрывает устройство конвейерной транспортировки, предназначенное для людей и имеющее поручень, где в поручень встроен по меньшей мере один приемоответчик. Устройство связи, установленное вблизи поручня, содержит передатчик и приемник. Передатчик передает энергию и данные в виде электромагнитных волн на приемоответчик. Приемоответчик передает данные измерения, связанные с физическими параметрами, например температурой, или скоростью, или ускорением поручня, на приемник. Встраиваемые в поручень приемоответчики подходят исключительно для поручней в виде ленты или ремня. Поручни этого типа можно контролировать с помощью нескольких приемоответчиков. Тем не менее, указанные приемоответчики не пригодны для других видов перил.
Устройство по п.1 формулы простыми средствами достигает цели, заключающейся в контроле конвейеров непрерывного действия, содержащих конвейерные элементы, устройства конвейерной транспортировки, предназначенного для людей и/или объектов.
Преимущественные варианты осуществления настоящего изобретения указаны в зависимых пунктах формулы.
Преимущества, достигаемые посредством настоящего изобретения, по существу заключаются в том, что могут быть обнаружены металлические или неметаллические конвейерные элементы конвейера непрерывного действия. Конвейерными элементами, подлежащими обнаружению, являются, например, элементы поручня, где поручень также может содержать один элемент поручня, ступени, поддоны или элементы цепи. Конвейерные элементы образуют сегментированный конвейер непрерывного действия, например поручень, транспортерная лента со ступенями, транспортерная лента с поддонами или транспортерная цепь для ступеней, или поддонов, или элементов поручней. Также преимуществом является то, что датчик, необходимый для обнаружения конвейерных элементов, обнаруживает конвейерные элементы на очень близком расстоянии. В результате, устройство контроля представляет собой компактную и малогабаритную конструкцию. Устройство контроля обнаруживает каждый отдельный конвейерный элемент и затем генерирует рабочие переменные, например скорость и/или ускорение/торможение. Также могут быть обнаружены недостающие или поврежденные конвейерные элементы. В этом случае, контролируемый конвейер непрерывного действия будет остановлен и/или будет подан сигнал о неисправности. Устройство контроля также подходит для учета элементов конвейера непрерывного действия, образующих сегментированные конвейеры непрерывного действия.
Настоящее изобретение далее будет раскрыто более подробно со ссылкой на следующее подробное описание и прилагаемые чертежи.
В графических материалах:
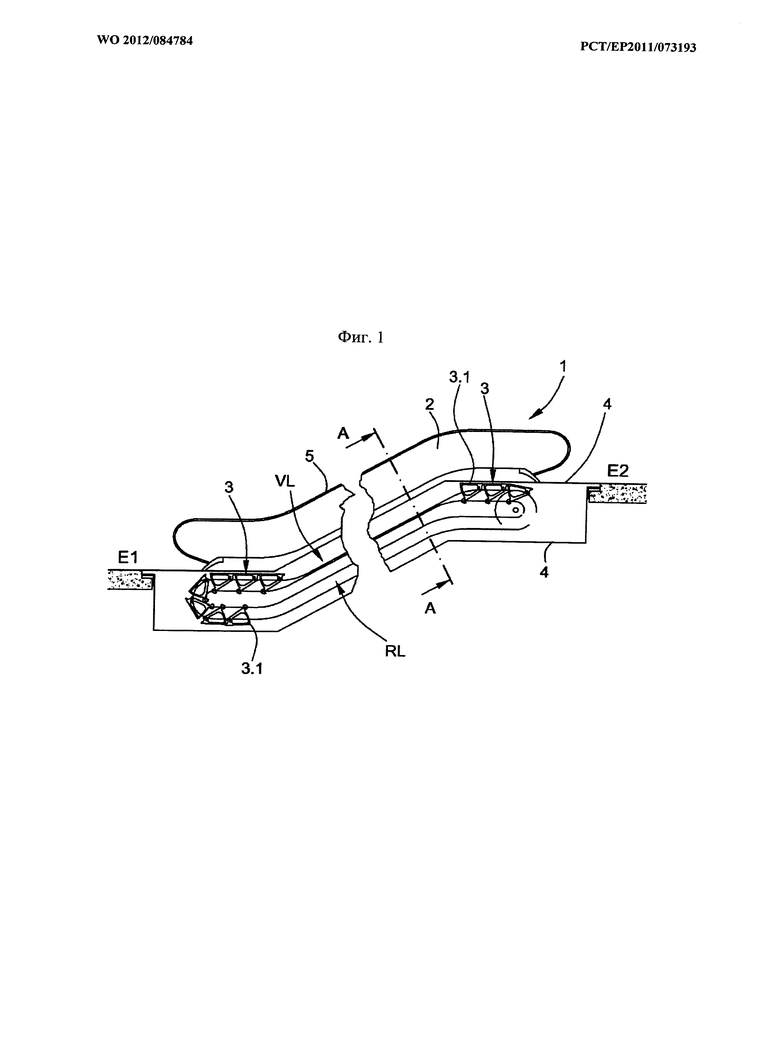
Фиг.1 показывает пример устройства конвейерной транспортировки, предназначенного для людей и/или объектов,
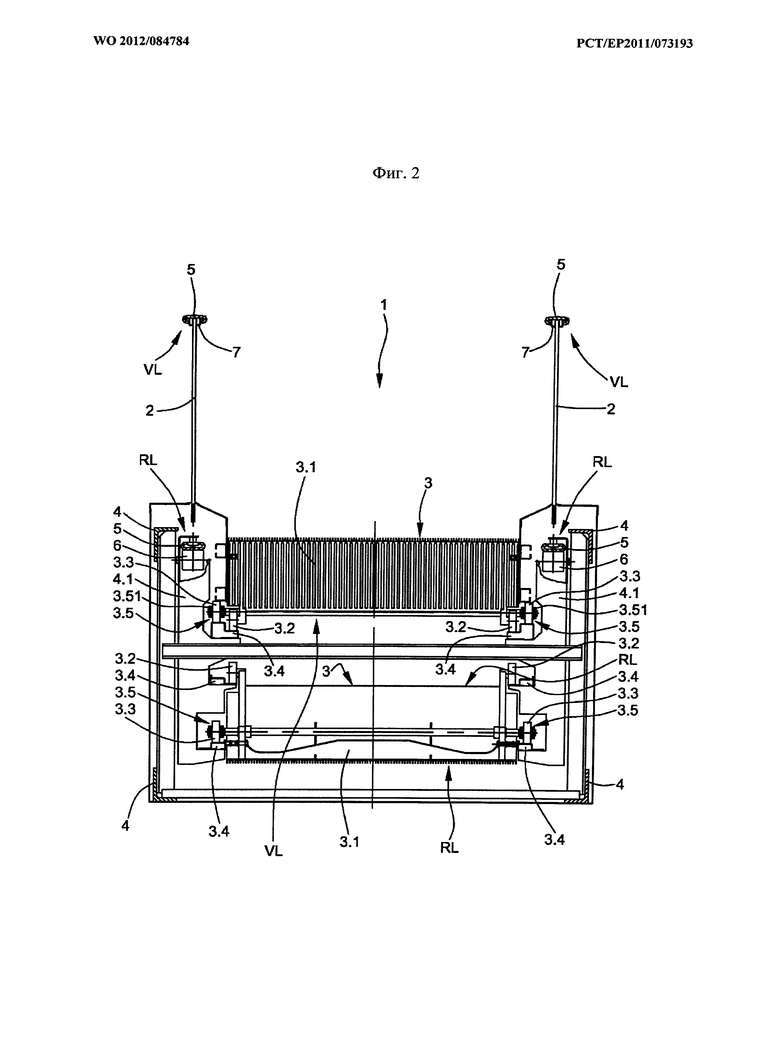
фиг.2 показывает вид устройства конвейерной транспортировки по фиг.1 в разрезе вдоль линии А-А,
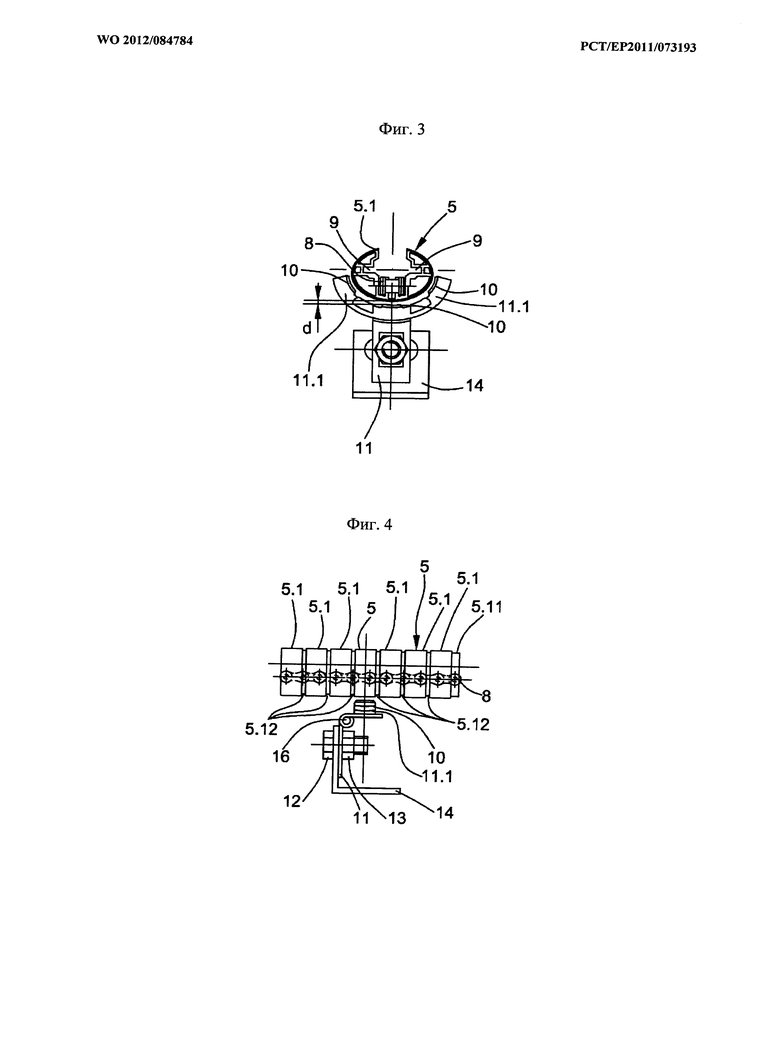
фиг.3 показывает вид поручня в поперечном сечении при движении в обратном направлении,
фиг.4 показывает вид сбоку поручня по фиг.3,
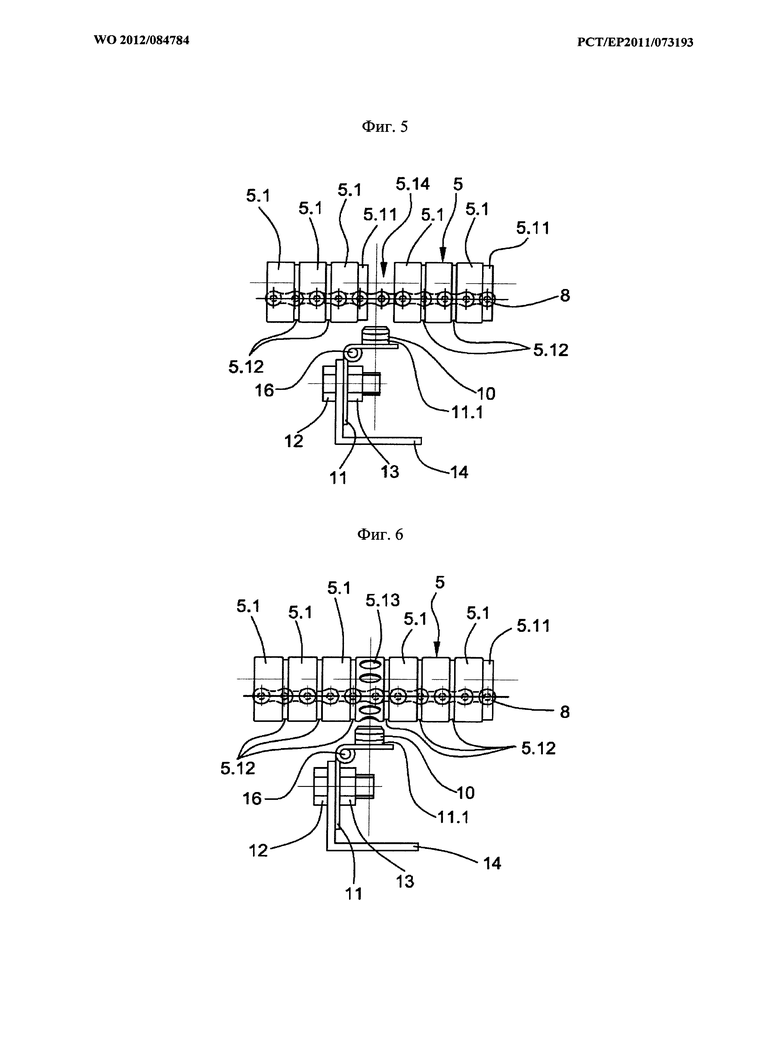
фиг.5 показывает поручень с недостающим элементом поручня,
фиг.6 показывает поручень с поврежденным элементом поручня,
фиг.7 показывает монтажную схему электроцепи для контроля конвейера непрерывного действия,
фиг.8 показывает графическое изображение электросигнала сегментированного поручня, содержащего элементы поручня,
каждая из фиг.9 и фиг.10 показывает графическое изображение электросигнала поврежденного поручня,
каждая из фиг.11, фиг.12 и фиг.13 показывает выходные сигналы электроцепи в зависимости от рабочего состояния конвейера непрерывного действия.
Примерный вариант осуществления устройства конвейерной транспортировки, предназначенного для людей и/или объектов, содержащего конвейерные элементы, соединяемые для образования конвейеров непрерывного действия, будет рассмотрен ниже на примере эскалатора, имеющего поручень, транспортерную ленту со ступенями и транспортерные цепи. Соответственно, описание также применимо к движущейся дорожке для поддонов или транспортерной ленте. В случае эскалатора, конвейерный элемент является элементом поручня, причем поручень может также содержать один элемент поручня, ступень или элемент цепи. Элементы поручня образуют поручень, ступени образуют транспортерную ленту со ступенями, а элементы цепи образуют транспортерные цепи транспортерной ленты со ступенями. В случае движущейся дорожки конвейерный элемент является элементом поручня, поддоном или элементом цепи. Элементы поручня образуют поручень, поддоны образуют транспортерную ленту с поддонами, а элементы цепи образуют транспортерные цепи транспортерной ленты с поддонами или транспортерной ленты поручня.
На фиг.1 схематически показано устройство конвейерной транспортировки на примере эскалатора 1 с перилами 2 и с транспортерной лентой 3 со ступенями, содержащей ступени 3.1 для транспортировки людей и/или объектов в прямом направлении VL из первого уровня E1 на второй уровень E2 или наоборот. Транспортерная лента 3 непрерывного действия со ступенями возвращается в обратном направлении RL. Несущая конструкция 4 служит опорой для транспортерной ленты 3 со ступенями и перил 2 и поддерживается на уровнях E1, E2. Поручень 5, поддерживаемый перилами 2 в прямом направлении VL, служит в качестве конвейера непрерывного действия для рук транспортируемого человека.
На фиг.2 показан вид устройства конвейерной транспортировки по фиг.1 в разрезе вдоль линии А-А. Каждая ступень 3.1 содержит ролики 3.2 ступени и ролики 3.3 цепи, где ролики 3.2, 3.3 катятся по направляющим 3.4. Направляющие установлены на каркасе 4.1 несущей конструкции 4. Как конвейер непрерывного действия, первая транспортерная цепь 3.5 с элементами 3.51 цепи транспортирует ступени 3.1 в прямом направлении VL и в обратном направлении RL. Поручень 2 направляется в обратном направлении RL посредством роликов 6 обратного хода и в прямом направлении VL посредством первого профиля 7 направляющей.
На фиг.3 показан вид поручня 5 в поперечном сечении при движении в обратном направлении RL, где поручень 5 сконструирован из отдельных, например, пустотелых элементов 5.1. Элементы 5.1 поручня транспортируются посредством транспортерной цепи 8 и направляются вдоль первого профиля 7 направляющей перил 2 в канавках 9 направляющих. К скобе 14 прикреплен посредством болта 12 и гайки 13 зажим 11, при этом, например, к зажиму 11 прикреплена опора датчика 11.1, содержащая датчики 10 для контроля элементов 5.1 поручня. Опора 11.1 датчика содержит три датчика 10, также может быть установлено всего два или один датчик.
На фиг.4 показан вид сбоку поручня 5 по фиг.3, где элементы 5.1 поручня перемещаются мимо опоры 11.1 датчика. Для большей наглядности рассматриваемого элемента 5.1 поручня на фиг.4-6 опора 11.1 датчика по фиг.3 показана не полностью. На зажиме 11 предусмотрены шарнирные элементы 16, при этом когда поврежденный элемент 5.1 поручня с выступающими частями поворачивает опору 11.1 датчика, датчики 10 не выбывают из рабочего процесса. Каждый элемент 5.1 поручня имеет выступ 5.11, проходящий в смежный с ним элемент 5.1 поручня. Элементы 5.1 поручня, шарнирно прикрепленные ко второй транспортерной цепи 8, могут двигаться относительно смежных с ними элементов 5.1 поручня, не образуя в процессе движения зазора между двумя смежными элементами 5.1 поручня. Между двумя смежными элементами 5.1 поручня выполнен только межсегментный желоб 5.12, глубина которого настолько мала, что исключает попадание в него пальцев. Межсегментный желоб 5.12 имеет глубину, например, приблизительно от 2 мм до 4 мм и ширину приблизительно от 4 мм до 8 мм.
На фиг.5 показан поручень 5 с недостающим элементом 5.1 поручня. Элемент 5.1 поручня, например, был сломан, выпал или удален вандалами с применением силы. Датчики 10 обнаруживают каждый присутствующий, а также каждый недостающий элемент 5.1 поручня.
На фиг.6 показан поручень 5 с поврежденным элементом 5.1 поручня. В одном элементе 5.1 поручня его части были, например, сломаны или удалены с применением силы в результате акта вандализма. Датчики 10 обнаруживают каждый присутствующий, а также каждый поврежденный элемент 5.1 поручня. Поврежденные элементы 5.1 поручня имеют, например, вмятины, трещины и/или отверстия 5.13.
Датчики 10, функционирующие в соответствии с различными принципами работы, могут рассматриваться в зависимости от свойств материалов конвейерных элементов. Например, антенны 10.1, эмиссионные характеристики которых могут быть изменены вследствие близости к антенне или вследствие сегментации поручня 5 или транспортерной ленты 3 со ступенями/поддонами, или транспортерных цепей 3.5, 8, подходят для контроля сегментированного поручня 5, образованного из элементов 5.1 поручня, или для контроля транспортерных лент 3 со ступенями/поддонами, образованных из ступеней 3.1 или поддонов, либо для контроля первой транспортерной цепи 3.5, образованной из элементов 3.51 цепи, или второй транспортерной цепи 8, как более детально описано ниже. Также могут рассматриваться датчики, работающие с применением принципа радара, в которых антенна передает электромагнитные сигналы на конвейеры непрерывного типа с конвейерными элементами, при этом сигналы отражаются в зависимости от контура конвейера непрерывного действия, и отраженные сигналы подлежат измерению. Также возможны датчики, работающие с использованием емкостного принципа. В этом случае, электроемкость конденсатора изменяется вследствие сегментации конвейера непрерывного действия. Конденсатор с индукционной катушкой образует резонансный контур, при этом резонансная частота указанного резонансного контура изменяется в зависимости от электроемкости конденсатора и определяет частоту излучателя.
Ниже будет более подробно описан датчик 10, содержащий антенну 10.1, эмиссионные характеристики которой могут быть изменены вследствие близости к антенне или вследствие сегментации 5.12 конвейера непрерывного действия, например, поручня 5, транспортерной ленты 3 со ступенями/поддонами, или транспортерной цепи 3.5, 8.
Близкое расстояние, в частности в ближней зоне антенны 10.1, между антенной 10.1 и конвейерными элементами, например элементами поручня, ступенями/поддонами, элементов цепи, приводит к интерференции сигналов, которые налагаются на желаемый информационный сигнал. Взаимодействия с объектами в дальней зоне не происходит; антенна свободно излучает сигнал, при этом дальняя зона определяется следующим образом: d/lambda>1. (d=расстояние от конвейера непрерывного действия до антенны, lambda=длина волны излучаемого антенной сигнала).
Объект, находящийся в ближней зоне, расстраивает антенну и изменяет ее сопротивление, при этом ближняя зона определяется следующим образом: d/lambda<1.
Расстояние d, показанное на Фиг.3 от элемента 5.1 поручня до антенны 10.1, например, установлено равным от 1,5 мм до 3,5 мм в ближней зоне, в которой еще с точностью определяются трещины, например, с длиной приблизительно 5 мм и/или отверстия 5.13, например, с диаметром приблизительно 5 мм. Отверстия 5.13 и трещины расстраивают антенну 10.1 меньше, чем выпуклости и выступающие части, например, поручня 5. Применяемый датчик (10) является антенной, работающей в радиочастотном диапазоне, например имеющейся на рынке антенной WLAN с частотой 2,4 ГГц (WLAN-беспроводная локальная вычислительная сеть).
Epsilonr является постоянной материала конвейерных элементов и является большей, чем 1. (Epsilonr для вакуума равна 1.) Промежуточные пространства между конвейерными элементами, например межсегментные желоба 5.12 между двумя смежными элементами 5.1 поручня, или зазоры между двумя смежными ступенями или поддонами, или ступенчатые переходы от одного элемента 3.51 цепи к соседнему элементу 3.51 цепи, приводят к последовательности изменений в диэлектрической постоянной Epsilonr. Например, в случае сегментированного поручня, эта последовательность включает элемент поручня-межсегментный желоб-элемент поручня-межсегментный желоб-элемент поручня… и т.д., при этом элемент поручня имеет большее значение Epsilonr, чем межсегментный желоб (Epsilonr приближен к 1).
Изменение в электрическом поле ближней зоны антенны 10.1 может быть выгодно использовано. Изменения диэлектрической постоянной Epsilonr конвейерных элементов, расположенных в непосредственной близости с антенной 10.1, например элементов поручня, ступеней/поддонов, элементов цепи, приводят к расстраиванию или изменению резонансной частоты антенны 10.1. Эти изменения приводят к отражению энергии, что возможно измерить в линиях передачи антенны. Изменения в диэлектрической постоянной Epsilonr в непосредственной близости с антенной 10.1 вызваны конвейерными элементами, которые проходят мимо антенны.
Компактная конструкция антенны и малое расстояние d от конвейерных элементов до антенны также являются преимуществами.
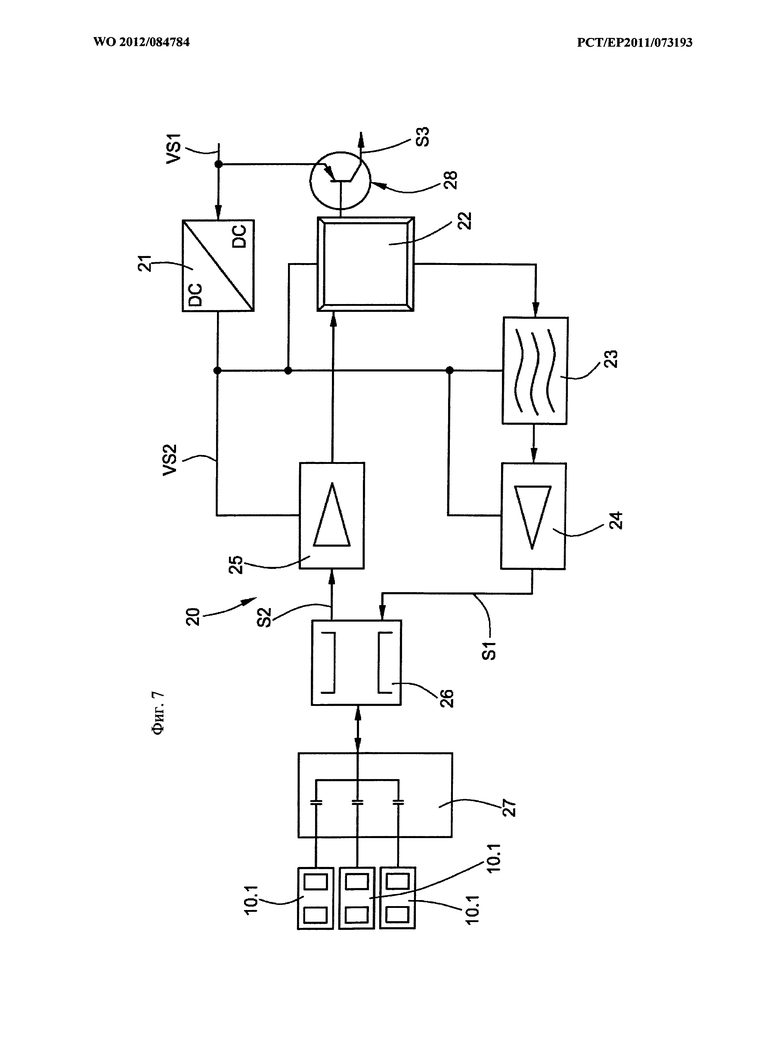
На Фиг.7 показана монтажная схема электроцепи 20 для предварительной обработки сигнала датчика, генерируемого датчиком 10. На преобразователь 21 напряжения поступает первое питающее напряжение VS1 эскалатора 1, например 24 В. Преобразователь 21 напряжения генерирует из первого питающего напряжения VS1 второе питающее напряжение VS2, например 5 В, при этом система 22 контроля, излучатель 23, радиочастотный усилитель 24 и усилитель 25 измеряемых значений запитаны указанным вторым питающим напряжением.
Система 22 контроля предварительно задает частоту, соответствующую антенне 10.1, при этом излучатель 23 генерирует сигнал на этой частоте и с заданной формой и амплитудой, например синусоидальный сигнал, и передает сигнал на радиочастотный усилитель 24. Усиленный радиочастотный сигнал S1 поступает на измерительный четырехполюсник 26, а оттуда на устройство 27 связи с антенной, к которому присоединены антенны 10.1, установленные на опоре 11.1 датчика. Когда в ближней зоне антенны 10.1 нет объектов, антенна работает исключительно резистивным образом (с сопротивлением, например, 50 Ом), и вся энергия первого сигнала S1 излучается без отражения. Если объекты, как указано выше, расположены в ближней зоне антенны 10.1, резонансная частота антенны 10.1 расстроена вследствие взаимодействия с объектами, и часть энергии первого сигнала S1 отражена антенной 10.1 на измерительный четырехполюсник 26 и оказывается на измерительном четырехполюснике 26 в качестве второго сигнала S2, отображающего поверхность конвейера непрерывного типа. Второй сигнал S2 поступает на усилитель 25 измеряемых значений. Указанный усилитель измеряемых значений усиливает второй сигнал S2 и подает его на систему 22 контроля для оценки.
Если конвейеры непрерывного действия, не содержащие контура или визуально обнаруживаемых мест повреждения поверхности или не имеющие составной конструкции или сегментации в ближней зоне антенны 10.1, перемещаются мимо антенны 10.1, образуется второй сигнал S2, также именуемый здесь "сигналом интерференции", но без "информационного сигнала". Информационный сигнал, который налагается на сигнал интерференции, прежде всего, образуется при изменениях поверхности конвейера непрерывного действия, или контура конвейера непрерывного действия, или при изменениях визуально обнаруживаемых конструкций, таких как отверстия, или трещины, или вмятины, или зазоры и т.д., на поверхности или при изменениях межсегментных желобов 5.12 между элементами 5.1 поручня, или зазоров между ступенями, или ступенчатых переходов от одного элемента цепи к другому, при этом изменение поверхности конвейера непрерывного действия приводит к изменению эмиссионных характеристик антенны.
Визуально-обнаруживаемые изменения поверхности конвейера непрерывного действия, например межсегментные желобы между элементами поручня, несегментированный поручень, содержащий зазоры, несегментированный поручень, содержащий трещины, поврежденные элементы поручня с отверстиями и/или трещинами, недостающие элементы поручня, недостающие ступени или поддоны, ступенчатые переходы от одного участка цепи к другому, недостающие элементы цепи, выступающие части конвейера непрерывного действия, зазоры между конвейерными элементами и т.д., могут быть обнаружены датчиком 10.
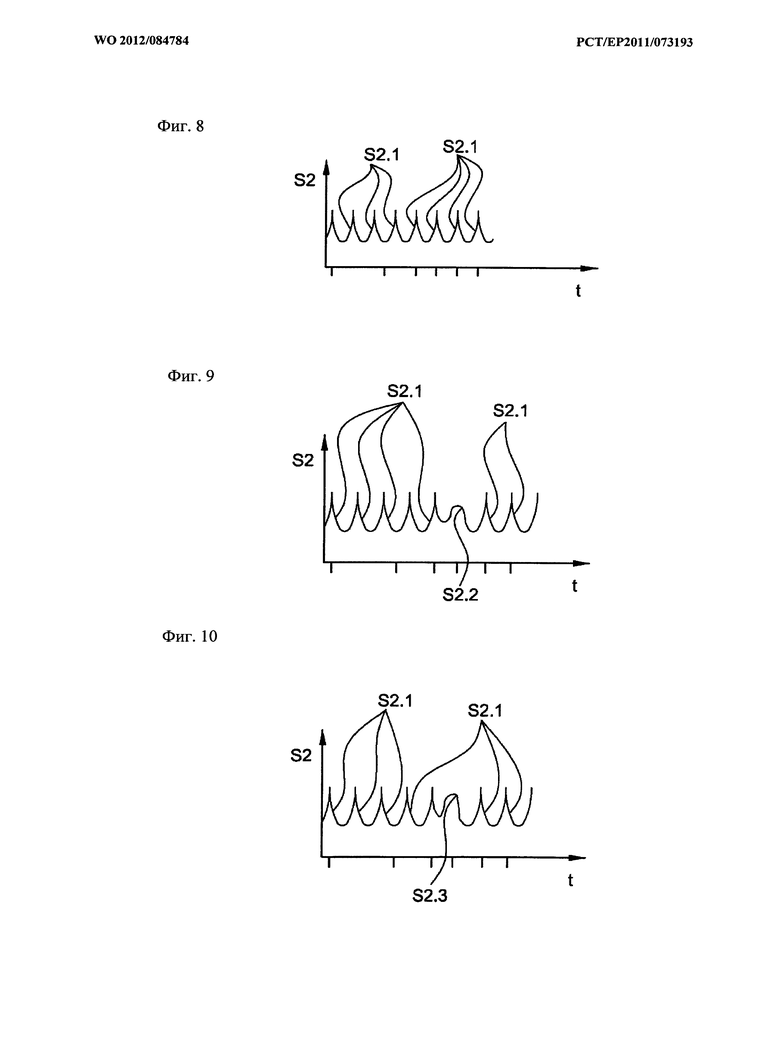
На фиг.8 показано графическое изображение электросигнала сегментированного поручня 5 по фиг.4, содержащего элементы 5.1 поручня. Второй сигнал S2 показан как функция времени t. Исправный поручень 5, перемещающийся мимо антенны 10.1, генерирует волнообразный информационный сигнал S2.1, который налагается на сигнал интерференции на каждом межсегментном желобе 5.12, при этом каждая волна S2.1 регистрируется системой 22 контроля.
Для подавления эффектов интерференции система 22 контроля вычисляет среднее значение, исходя из значений волн S2.1, измеренных за последнее время (например, из последних 64 измеренных волн), и сравнивает это среднее значение с измеренным значением текущей волны S2.1. Если отклонение между текущим значением измерения и средним значением находится в определенном интервале допусков, элемент 5.1 поручня, измеряемый в текущее время, рассматривается как исправный.
На фиг.9 показано графическое изображение электросигнала сегментированного поручня 5 по фиг.5, который содержит элементы 5.1 поручня и имеет один недостающий элемент 5.1 поручня. Второй сигнал s2 показан как функция времени t. Недостающий элемент 5.1 поручня образует волну соответствующего сигнала S2.2 только до определенной степени. Система 22 контроля обнаруживает поврежденное место и генерирует сигнал о неисправности.
На фиг.10 показано графическое изображение электросигнала сегментированного поручня 5 по фиг.6, который содержит элементы 5.1 поручня и имеет элемент 5.1 поручня, содержащий отверстия 5.13 и/или трещины. Второй сигнал S2 показан как функция времени t. Поврежденный элемент 5.1 поручня образует волну соответствующего сигнала S2.3 только до определенной степени. Система контроля обнаруживает поврежденное место и генерирует сигнал о неисправности.
Система 22 контроля по фиг.7 генерирует посредством выходного каскада 28 третий сигнал S3, соответствующий рабочему состоянию конвейера непрерывного действия. Выходной каскад может содержать, например, полупроводниковый переключатель, оптосоединитель или магистральную систему.
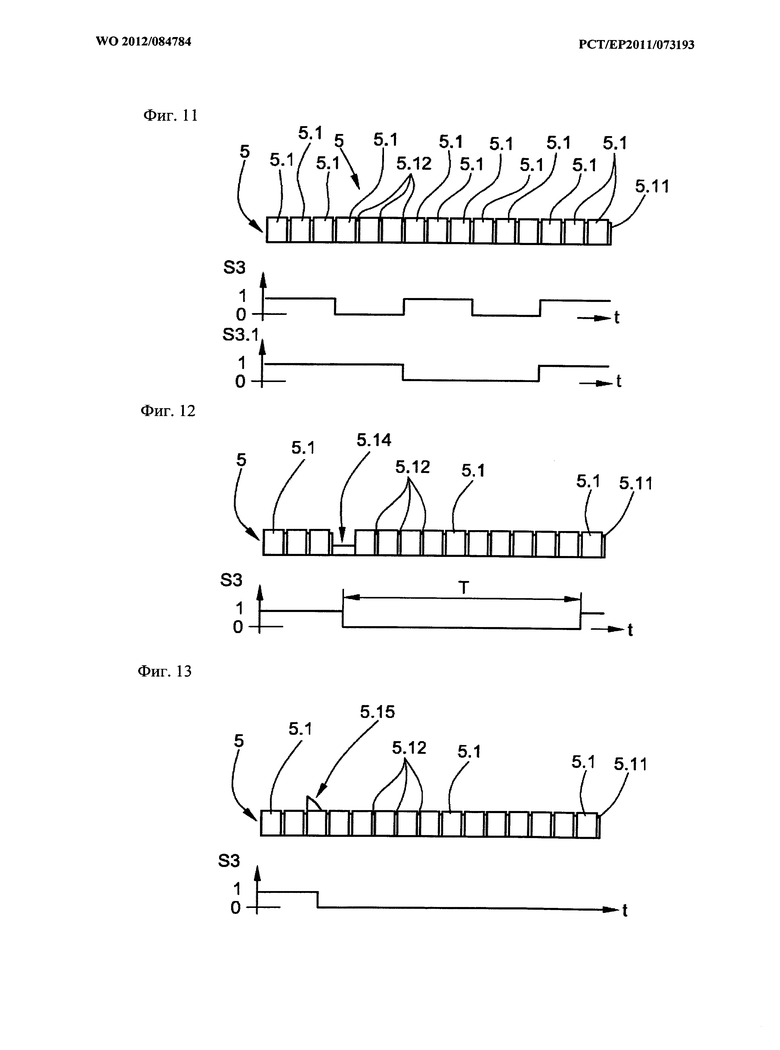
На фиг.11 показан конвейер непрерывного действия на примере сегментированного поручня 5 с элементами 5.1 поручня. При номинальной скорости поручень генерирует сигнал S3, показанный как функция времени t. Сигнал S3 изменяется от логического 0 до логической 1 и наоборот, например после каждого третьего элемента 5.1 поручня. Например, при половине скорости сигнал S3.1 сгенерирован как функция времени t. Сигнал S3, S3.1 поступает, например, на систему контроля эскалатора для регулирования и/или контроля скорости. Для определения рабочих переменных, например, скорости транспортировки, ускорения во время запуска и торможения во время остановки применяют число импульсов на единицу времени.
На фиг.12 показан выходной сигнал S3 с частично или полностью отсутствующим элементом 5.14 поручня или с элементом 5.1 поручня с трещинами и/или отверстиями 5.13. Третий сигнал S3 установлен равным логическому 0 для определенного времени T, например 30 секунд. Система управления эскалатора обнаруживает это состояние и генерирует по меньшей мере одно сообщение о неисправности.
На фиг.13 показан поручень 5 с поврежденным элементом 5.1 поручня с выступающими частями 5.15, который поворачивает опору 11.1 датчика посредством шарнирных элементов 16, при этом датчики 10 не выбывают из рабочего процесса. В отвернутом положении датчик 10 не может обнаружить элементы 5.1 поручня, сигнал S3 остается соответствовать логическому нулю. Система контроля эскалатора определяет это состояние, останавливает эскалатор 1 и генерирует по меньшей мере одно сообщение о неисправности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАССАЖИРСКИЙ КОНВЕЙЕР И СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ПАССАЖИРСКОГО КОНВЕЙЕРА | 2007 |
|
RU2460682C2 |
| ЭСКАЛАТОР ИЛИ ГРУЗОВОЙ ПОДЪЕМНИК С ПРИВОДОМ | 2007 |
|
RU2464218C2 |
| ПАССАЖИРСКИЙ КОНВЕЙЕР С ВОЗМОЖНОСТЬЮ ПРЕДСТАВЛЕНИЯ ПРЕИМУЩЕСТВЕННО ВИЗУАЛЬНОЙ ИНФОРМАЦИИ | 2011 |
|
RU2473136C1 |
| УСТРОЙСТВО ИНДИКАЦИИ НАПРАВЛЕНИЯ ДВИЖЕНИЯ ПАССАЖИРСКОГО КОНВЕЙЕРА И ПАССАЖИРСКИЙ КОНВЕЙЕР | 2003 |
|
RU2428369C2 |
| КОНТРОЛЬ МЕХАНИЧЕСКОГО СОСТОЯНИЯ ЭСКАЛАТОРА ИЛИ ТРАВОЛАТОРА | 2018 |
|
RU2754023C2 |
| УСТРОЙСТВО ДЛЯ МЫТЬЯ ПОРУЧНЕЙ ЭСКАЛАТОРА | 2019 |
|
RU2785036C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ТРАНСПОРТЕРА | 2009 |
|
RU2509049C2 |
| ПОРУЧЕНЬ ДЛЯ СИСТЕМЫ ПЕРЕМЕЩЕНИЯ ПАССАЖИРОВ | 2021 |
|
RU2811208C1 |
| ПАССАЖИРСКИЙ КОНВЕЙЕР | 2020 |
|
RU2788243C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ЛЮДЕЙ, В ЧАСТНОСТИ, ЭСКАЛАТОР ИЛИ ДВИЖУЩИЙСЯ ТРОТУАР С ДВИЖУЩИМСЯ ПОРУЧНЕМ ИЛИ ПОРУЧЕНЬ ДЛЯ ЭСКАЛАТОРА ИЛИ ДВИЖУЩЕГОСЯ ТРОТУАРА | 2009 |
|
RU2527872C2 |
Устройство (1) конвейерной транспортировки содержит конвейер (3, 3.5, 5) с конвейерным элементом (3.1, 3.51, 5.1). Датчик (10) предусмотрен для регистрации поверхности конвейера. Сигнал датчика предварительно обрабатывает электрическая цепь (20). После обработки могут быть сгенерированы рабочие переменные и/или поврежденные или недостающие конвейерные элементы (3.1, 3.51, 5.1) могут быть обнаружены. Датчик является антенной (10.1), работающей в радиочастотном диапазоне, а конвейерный элемент (3.1, 3.51, 5.1) может перемещаться в ближней зоне антенны (10.1). Обеспечивается контроль работы конвейера компактной конструкцией датчика. 2 н. и 9 з.п. ф-лы, 13 ил.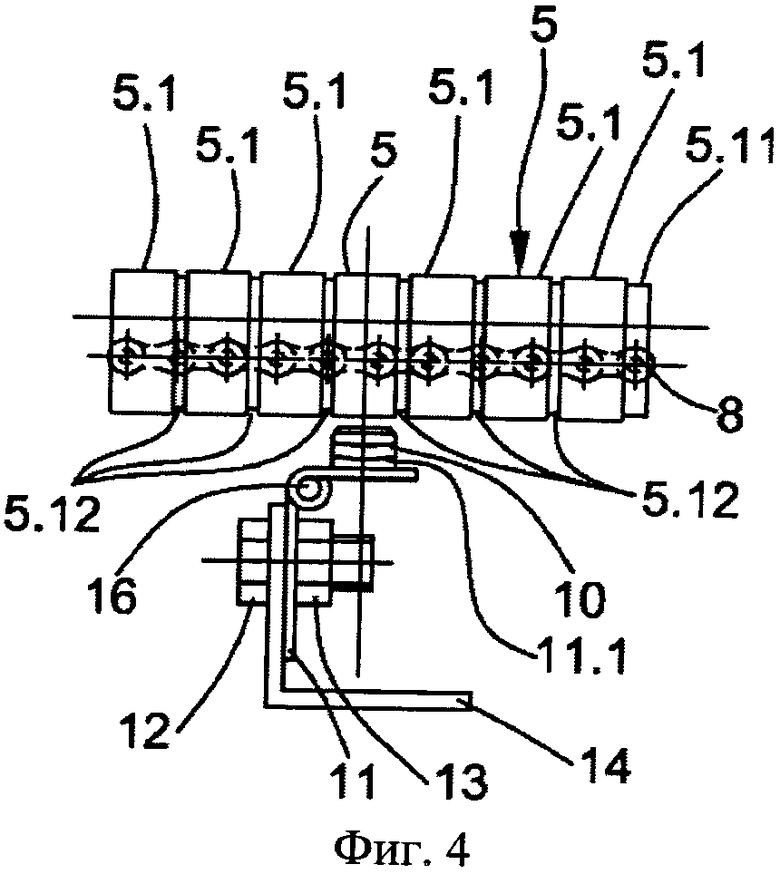
1. Устройство (1) конвейерной транспортировки, содержащее по меньшей мере один конвейер (3, 3.5, 5) непрерывного действия, который содержит по меньшей мере один конвейерный элемент (3.1, 3.51, 5.1), и предназначенное для людей и/или объектов, где предусмотрены по меньшей мере один датчик (10) для регистрации поверхности конвейера (3, 3.5, 5) непрерывного действия и электрическая цепь (20) для предварительной обработки сигнала датчика, отображающего эту поверхность, при этом могут быть сгенерированы рабочие переменные и/или поврежденные или недостающие конвейерные элементы (3.1, 3.51, 5.1) могут быть обнаружены из предварительно обработанного сигнала, причем датчик (10) является антенной (10.1), работающей в радиочастотном диапазоне, а конвейерный элемент (3.1, 3.51, 5.1) может перемещаться в ближней зоне антенны (10.1).
2. Устройство (1) конвейерной транспортировки по п. 1, отличающееся тем, что конвейер (3, 3.5, 5) непрерывного действия является сегментированным.
3. Устройство (1) конвейерной транспортировки по п. 1, отличающееся тем, что конвейер (3, 3.5, 5) непрерывного действия является несегментированным.
4. Устройство конвейерной транспортировки по любому из пп. 1-3, отличающееся тем, что расстояние (d) от конвейерных элементов (3.1, 3.51, 5.1) до антенны (10.1) составляет приблизительно от 1,5 мм до 3,5 мм.
5. Устройство конвейерной транспортировки по любому из пп. 1-3, отличающееся тем, что антенна (10.1) является антенной WLAN.
6. Устройство конвейерной транспортировки по п. 5, отличающееся тем, что антенна (10.1) рассчитана на частоту 2,4 ГГц.
7. Устройство конвейерной транспортировки по любому из пп. 1-3, отличающееся тем, что антенна (10.1) может быть повернута в сторону посредством выступающих частей (5.15) конвейерных элементов (3.1, 3.51, 5.1).
8. Способ контроля устройства (1) конвейерной транспортировки, содержащего по меньшей мере один конвейер (3, 3.5, 5) непрерывного действия, который содержит по меньшей мере один конвейерный элемент (3.1, 3.51, 5.1), и предназначенного для людей и/или объектов, где по меньшей мере один датчик (10) регистрирует поверхность конвейера (3, 3.5, 5) непрерывного действия, и по меньшей мере одна электрическая цепь (20) предварительно обрабатывает сигнал датчика, отображающий эту поверхность, причем конвейерный элемент (3.1, 3.51, 5.1) перемещается в ближней зоне антенны (10.1), работающей в качестве датчика (10) в радиочастотном диапазоне.
9. Способ по п. 8, отличающийся тем, что электрическая цепь (20) подает радиочастотный сигнал (S1) на антенну (10.1), а антенна (10.1) отражает информационный сигнал (S2) на электрическую цепь (20) в зависимости от поверхности устройства конвейерной транспортировки.
10. Способ по п. 9, отличающийся тем, что электрическая цепь (20) генерирует из информационного сигнала (S2) сигналы (S3) для определения рабочих переменных конвейера (3, 3.5, 5) непрерывного действия и/или генерирует сигналы (S3) для определения опасных рабочих состояний конвейера (5) непрерывного действия.
11. Способ по п. 10, отличающийся тем, что рабочими переменными являются, например, скорость, ускорение и/или торможение конвейера (3, 3.5, 5) непрерывного действия, и опасные рабочие состояния вызваны, например, недостающими, поврежденными и/или выступающими конвейерными элементами (3.1, 3.51, 5.1).
| US 2009135019 A1, 28.05.2009 | |||
| US 6112166 A, 29.08.2000 | |||
| WO 2004014774 A1, 19.02.2004 | |||
| US 3651506 A, 21.03.1972. |

