Настоящее изобретение относится к усовершенствованиям в системе обеспечения безопасности транспортерного устройства и применяется в частности в пассажирских транспортерах, таких как эскалаторы, движущиеся дорожки и траволаторы.
Известные транспортеры в целях безопасности оснащены датчиками, обычно выключателями, для распознавания характерных опасных явлений, например, попадания инородного предмета в проем поручней или выходной гребень, и схемой управления для осуществления соответствующего действия, обычно остановки транспортера, когда посредством указанного датчика распознано указанное явление. Эти датчики обычно предназначены для выполнения только одной функции безопасности. Датчики могут быть индивидуально соединены с контроллером посредством проводов или через стандартную систему шин. Нормально замкнутые выключатели обычно соединены последовательно с целью формирования так называемой цепи безопасности, так что, когда какой-либо выключатель разомкнут, цепь прерывается, после чего следует соответствующий отклик безопасности.
Использование для таких функций безопасности программируемых компьютеров обычно ограничено, однако, использование компьютеров позволяет достигать такие известные преимущества, как экономия затрат, улучшенный контроль и улучшенное распоряжение и управление.
Задачей настоящего изобретения является разработка систем обеспечения безопасности, использующих компьютеры и обеспечивающих расширенную фунциональность с высоким уровнем целостности обеспечения безопасности.
В соответствии с настоящим изобретением предложен способ управления функцией безопасности транспортера, включающий подачу сигналов от датчиков, размещенных во взаимодействии с транспортером, к компьютерной системе;
эксплуатацию транспортера в режиме обучения; в процессе эксплуатации в режиме обучения, определение в компьютерной системе взаимосвязи между выходными сигналами датчиков и предварительно сохраненной в указанной компьютерной системе логикой, которая описывает физическую геометрию возможных типов транспортеров и их допустимые рабочие характеристики, и определение взаимосвязи между указанными выходными сигналами датчиков для установления целостности обеспечения безопасности указанных датчиков и сохранение образцов сигналов датчиков в качестве эталонного образца;
последующая эксплуатация транспортера в рабочем режиме, в котором контролируют функции безопасности; и при работе в рабочем режиме, сравнивание в компьютерной системе указанного образца сигналов датчика с указанным эталонным образцом и с указанной предварительно сохраненной логикой с целью установления целостности обеспечения безопасности указанных датчиков, компьютерной системы и эксплуатации транспортера.
Настоящее изобретение, по меньшей мере в предпочтительных вариантах реализации, посредством контроля целостности обеспечения безопасности может обеспечивать необходимую безопасность транспортера без опоры на абсолютные значения выходных сигналов датчиков и сравнения их с постоянными значениями. Таким образом может быть обеспечена защита всего транспортера, даже в случае некоторых изменений в самом транспортере.
Отличие от известных процессов заключается в том, что в случае неустановления целостности обеспечения безопасности может быть выполнено действие, связанное с защитой, например, остановка транспортера, даже в случае отсутствия выходного сигнала датчика, что само по себе указывает на неисправное состояние. Очевидно, что это ведет к улучшению общей безопасности эксплуатации.
Ниже приведено подробное описание вариантов реализации настоящего изобретения со ссылками на прилагаемые чертежи.
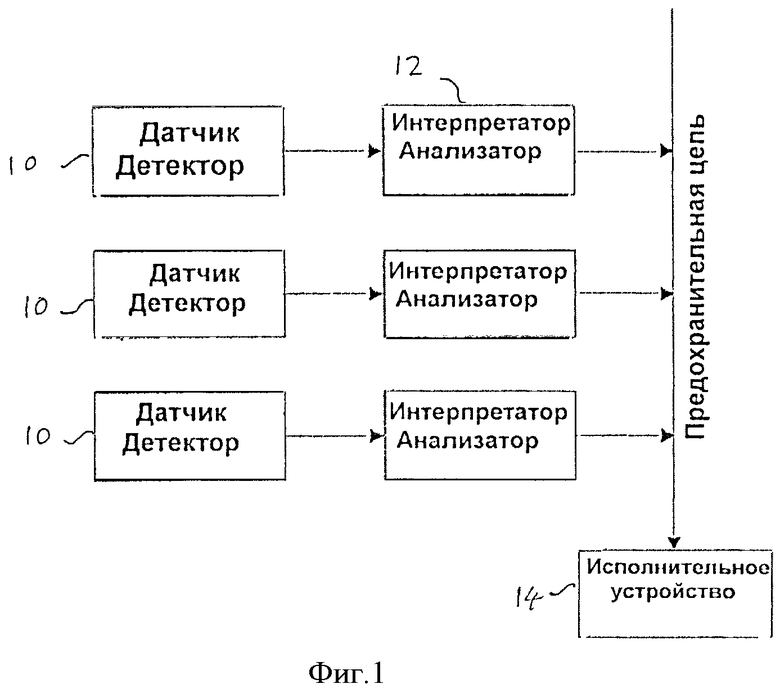
Фиг.1 показывает концептуальную схему обеспечения безопасности в известных эскалаторах.
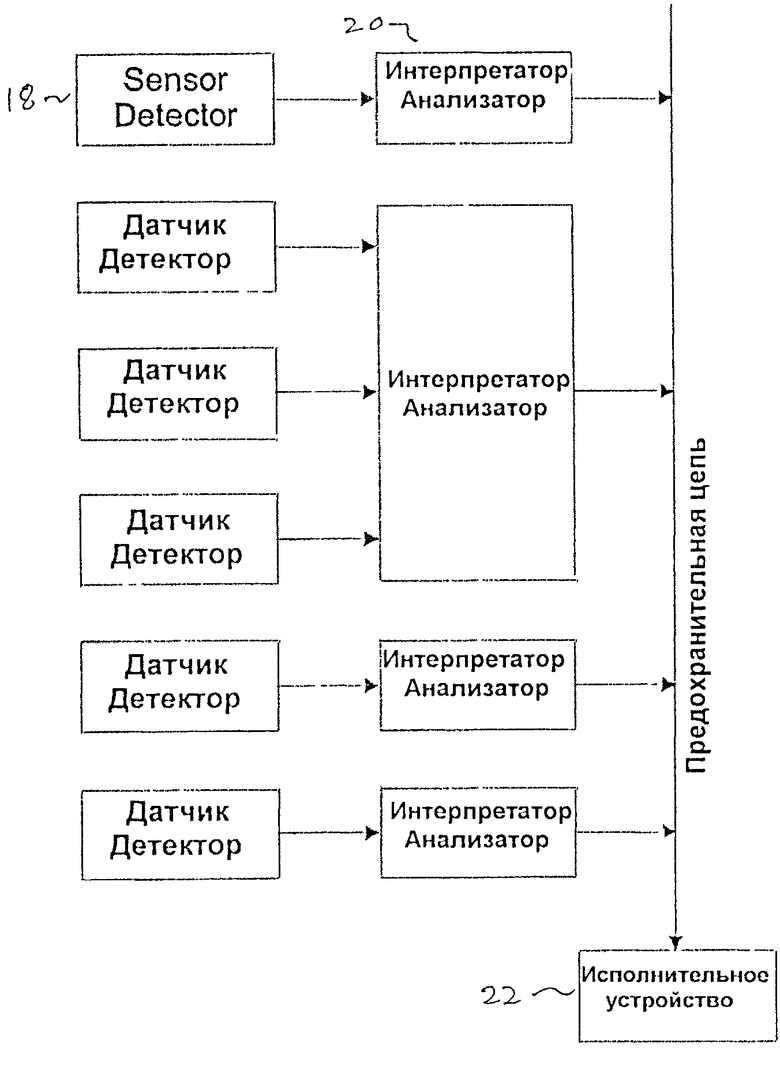
Фиг.2 показывает схему, аналогичную схеме согласно Фиг.1, иллюстрирующую некоторые новые аспекты настоящего изобретения.
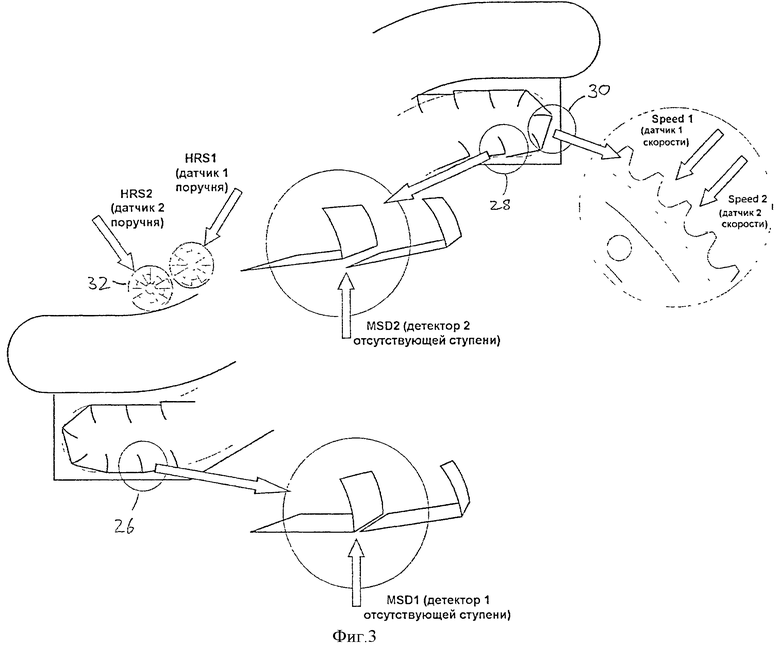
Фиг.3 показывает возможное размещение датчиков в эскалаторе согласно настоящему изобретению.
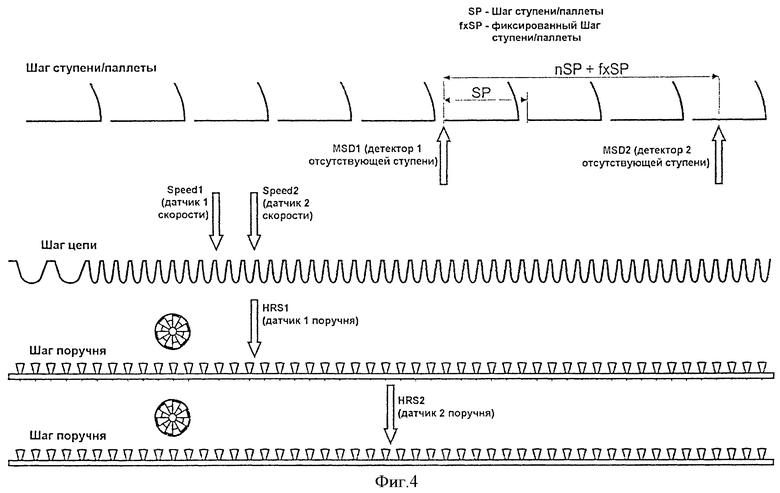
Фиг.4 показывает физический образец в системе, распознанный посредством датчиков.
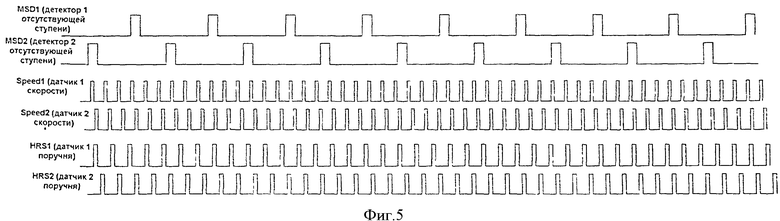
Фиг.5 показывает сигнальный образец указанных датчиков, распознающих указанный физический образец.
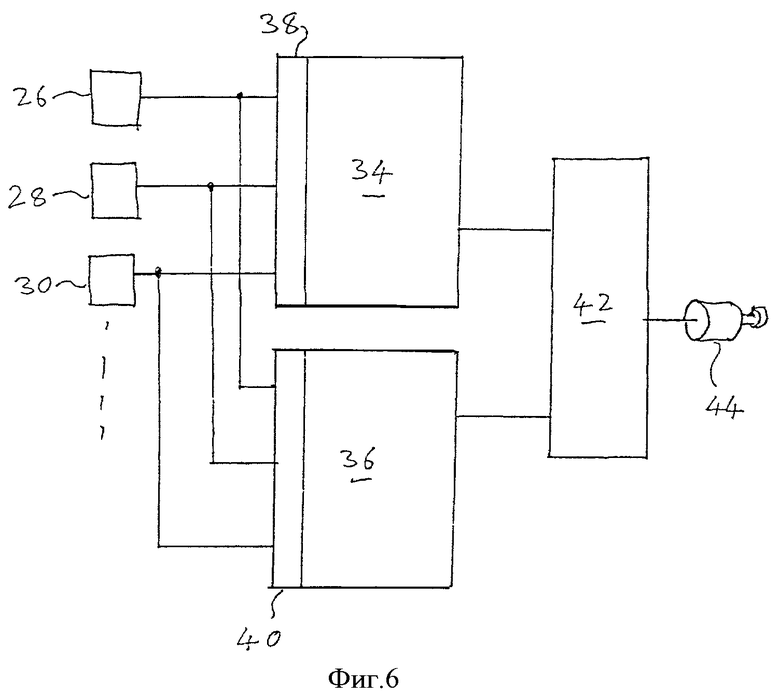
Фиг.6 показывает возможную аппаратную реализацию настоящего изобретения.
Фиг.7 показывает общую блок-схему процесса обеспечения безопасности согласно настоящему изобретению.
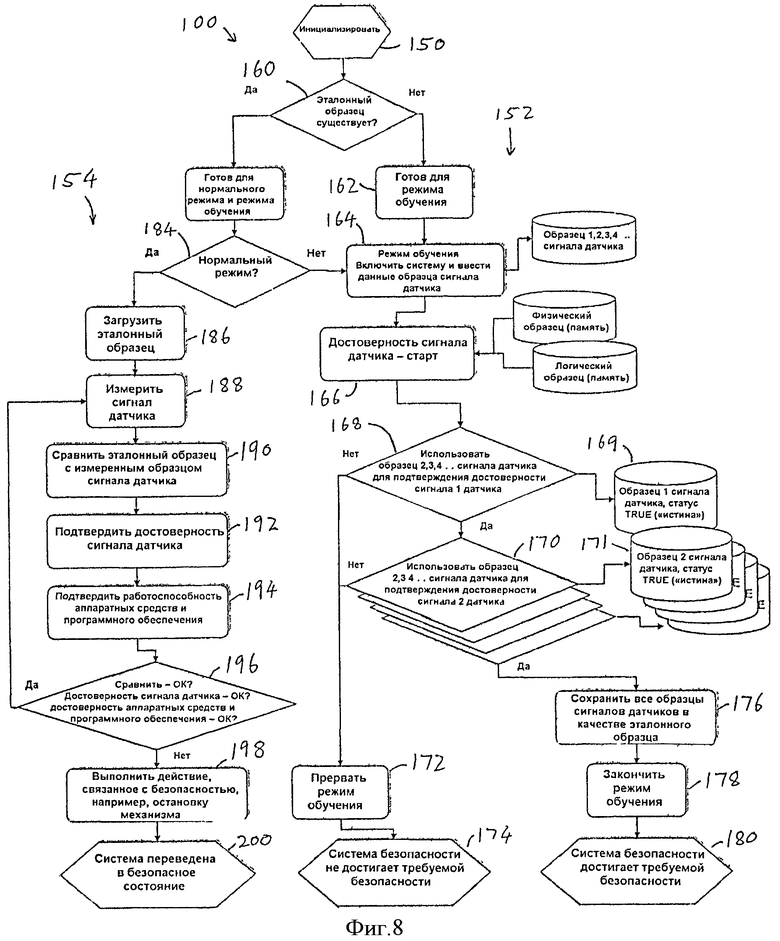
Фиг.8 показывает более подробную блок-схему указанного процесса.
Согласно фиг.1, в известной системе безопасности каждый датчик выполнен с возможностью распознавания состояния одиночной неисправности и с возможностью защиты от указанного состояния. Датчики 10 размещены там, где необходимо распознавание сбоев и опасных состояний. Система безопасности в основном включает три элемента: датчики 10, например рычаги, наклонные элементы, скользящие контакты или световые барьеры, фотодатчики, приборы с зарядовой связью, датчики Холла и т.п.; интерпретатор/анализатор 12, который интерпретирует выходной сигнал соответствующего датчика 10 и, например, размыкает, замыкает или прерывает выходной сигнал на основании сигнала указанного датчика; и исполнительное устройство 14, выполняющее действие, основанное на статусе интерпретаторов. Обычно выходы интерпретаторов соединены последовательно с целью формирования цепи безопасности, которая переводит указанную систему в безопасный режим, что обычно подразумевает остановку устройства. Каждая комбинация датчик/интерпретатор, включающая разрыв цепи безопасности, должна служить целостности обеспечения безопасности, необходимой для заданной функции. Какое-либо изменение в целостности обеспечения безопасности в течение срока службы компонентов не может быть отслежено.
На Фиг.2 показаны аспекты настоящего изобретения. В частности, посредством обычного интерпретатора интерпретируют несколько функций безопасности с различными требованиями, относящимися к уровню безопасности. Каждый датчик не относится напрямую только к одной функции безопасности; кроме того, посредством датчика может быть выдан статус информации. Кроме того, целостность датчика не является необходимым условием для обеспечения целостности одиночной функции безопасности. Эта информация скомбинирована со статусом информации по меньшей мере одного другого датчика. Образцы указанной комбинированной информации интерпретируют как безопасные или небезопасные образцы информации посредством сравнения с эталонным образцом информации, а также посредством сравнения с логическим отношением, заданным в указанном компьютере. Каждый из эталонных образцов может иметь ограниченные допустимые отклонения, в пределах которых измеренный образец датчика может быть интерпретирован как безопасный или небезопасный статус. Сравнение принятых и обработанных сигналов может быть использовано для оценки целостности датчиков, обрабатывающего блока (компьютера), а также образца, полученного в режиме обучения. Таким образом возможно непрерывное наблюдение за целостностью датчиков и обрабатывающего блока.
Раскрытая система безопасности как правило включает три элемента: датчики 18, интерпретаторы 20, которые комбинируют, сравнивают и различают принятые сигналы датчиков и извлекают из них результат; и исполнительное устройство 22, выполняющее действие, основанное на статусе указанных интерпретаторов. И в этом случае выходы интерпретаторов обычно соединяют последовательно или эффективно комбинируют с использованием избыточных логических комбинаций AND (И), чем переводят указанную систему в безопасный режим. Обычно под этим подразумевается остановка механизма, если посредством указанного исполнительного устройства определено, что безопасное состояние не существует.
Интерпретаторы 20 могут принимать выходной сигнал от более чем одного датчика. Это позволяет выполнять более обширные проверки безопасности. В соответствии с одним важным аспектом настоящего изобретения, интерпретаторы 20 могут выполнять более одной функции безопасности, основанной на выходном сигнале более чем одного датчика. В соответствии с описанным ниже вариантом реализации, возможно использование трех датчиков для защиты, например, от превышения скорости, пропадания ступени, растяжения цепи и движения в обратную сторону.
В соответствии с другим аспектом, интерпретаторы 20 могут сравнивать образец выходных сигналов датчика с эталонным образцом, полученным в режиме обучения, с образцом сохраненной логики и физическим образцом, а также выполнять функцию безопасности, когда указанный образец не совпадает. Сохраненная логика самостоятельно определяет, совпадает ли образец, полученный в режиме обучения, с возможной аппаратной конфигурацией эскалаторов, используемых производителем. Как описано выше, указанный образец имеет встроенные уровни допустимых значений. Предпочтительно устанавливают образец для сравнения и/или устанавливают его параметры в процессе обучающей стадии прогона эскалатора, т.е. в режиме обучения.
На Фиг.3 схематически показано возможное размещение датчиков в эскалаторе в соответствии с настоящим изобретением.
Датчики ступеней или детекторы MSD1 и MSD2 (26, 28) отсутствующих ступеней размещены вблизи ветви обратного хода эскалатора, соответственно вблизи нижней части и верхней части эскалатора, или в других подходящих местах. Датчики или детекторы могут распознавать соответствующие характеристики ступеней, такие как наличие материала, образец, использованный для верхней части или нижней части ступени, или зазор между ступенями или пластинами, как показано на Фиг.3. Например, детекторы могут быть индуктивными или емкостными или могут использовать оптические системы, такие как фотодатчик или световой барьер, или оптическая система обработки изображений любого типа, например датчик с зарядовой связью. В частности, одним подходящим датчиком является индуктивный датчик с открытым коллектором.
Один или два датчика SPEED1 и SPEED2 (30) скорости могут распознавать шаг зубчатого колеса ведущей звездочки, или к оси главного приводного вала или к ведущей оси поручней с использованием известных способов может быть присоединено кодирующее устройство.
Датчики HRS1 и HRS2 (32) поручней могут распознавать движение поручней.
Все указанные датчики могут быть различных типов. Возможно использование индуктивных, емкостных и оптических детекторов. В случае неиспользования зубчатого колеса возможно использование оптического или механического диска кодирующего устройства.
Хотя в этом примере показаны два датчика ступеней и два датчика поручней, возможно использование только одного датчика ступеней и/или только одного датчика поручней, если может быть принят более низкий уровень целостности обеспечения безопасности.
На Фиг.4 показан физический образец указанного транспортера в упрощенной линейной форме, включающий расположение датчиков согласно Фиг.3. В показаном варианте реализации расстояние между детекторами 26, 28 ступеней подобрано таким образом, чтобы составлять целое число длин ступеней плюс часть f, которая не равна половине и составляет, например, 1/3 длины ступени, как показано для обнаружения направления, как описано ниже. Датчики 30 SPEED1 и SPEED2 скорости показаны как размещенные вблизи звездочки цепной передачи одиночного привода, и датчики 32 HRS1 и HRS2 поручней показаны как размещенные вблизи звездочки поручней соответствующего левого и правого поручня.
На Фиг.5 показаны временные диаграммы образца сигнала вышеописанных индивидуальных датчиков, которые ниже описаны более подробно.
Далее описаны некоторые рабочие характеристики и взаимозависимости сигналов указанных датчиков.
Функция отсутствующей ступени или пластины
Датчики MSD1 и MSD2 отсутствующих ступеней предоставляют образец информации. В сочетании с указанной информацией о скорости, которая поступает от датчиков SPEED1 и SPEED2 скорости и датчиков HRS1 и HRS2 поручней, возможно обеспечение высокой целостности измерения длины ступени или пластины и зазора между ступенями/пластинами, а также возможно измерение точной скорости группы ступеней. Однородный для всех показаний датчиков скорости логический образец, например, передаточных чисел, в пределах указанного физического образца формирует линейные коэффициенты между полученными образцами, так что вся полученная информация остается относительной и не относится к ограничениям по абсолютной величине.
Необратимость функции направления
Путем установки датчиков MSD1 и MSD2 отсутствующих ступеней при кратном числе длин ступеней плюс часть длины ступени возможно распознавание последовательности зазоров, которое может дать информацию о направлении. Кроме того, местоположения датчиков SPEED1 и SPEED2 скорости и их взаимное расположение повышает целостность распознанного направления от датчиков MSD отсутствующих ступеней и наоборот. Эта избыточность информации о направлении содействует повышению уровня целостности обеспечения безопасности.
Посредством комбинирования сигналов зазоров между ступенями с импульсами информации о скорости возможно, например, после 1/3 длины ступени, также идентифицировать направление.
Функция превышения скорости
В соответствии с показанным вариантом реализации, от двух до трех или до шести датчиков выдают частоты избыточных сигналов от указанных нескольких датчиков, выдавая избыточную информацию об изменениях скорости. Возможно использование различных разрешений образца скорости с целью идентификации критических ускорений и замедлений без потери целостности вследствие избыточности сигнала.
Кроме того, посредством сигналов датчиков MSD1 и MSD2 отсутствующих ступеней возможно определение укорочения или удлинения указанной цепи ступеней.
Имеется возможность распознавания разницы между скоростью ступеней и скоростью поручней и осуществления дальнейших действий по обеспечению безопасности.
На Фиг.6 показана возможная аппаратная реализация настоящего изобретения. Датчики 18 (26, 28, 30) соединены с компьютерной системой, содержащей, например, компьютеры 34, 36 обеспечения избыточности через интерфейсы 38, 40 обеспечения избыточности. Указанные датчики могут быть соединены с указанными интерфейсами посредством проводов или посредством системы шин избыточных данных. Каждый компьютер 34, 36 содержит собственное программное обеспечение и выполняет тесты входных сигналов, как описано выше. Кроме того, указанные компьютеры выполняют сопоставление с образцом, как более подробно описано ниже.
Компьютеры 34, 36 подают команды в контроллер 42 электродвигателя/тормоза (который обозначен на Фиг.2 как исполнительное устройство), который предназначен для управления электродвигателем и тормозом 44, так что указанный эскалатор может быть приведен в движение только если оба компьютера указывают на то, что безопасное состояние существует. Избыточность вычисления содействует повышению уровня целостности обеспечения безопасности самих вычислений.
Очевидно, что может быть использовано различное количество датчиков для распознавания различных явлений. В соответствии с другим вариантом реализации, возможна установка разнесенных датчиков поручней и возможна установка более чем одного датчика скорости цепи.
На Фиг.7 показана общая блок-схема программ, выполняемых в компьютерах 34, 36.
После инициализации на этапе 50 указанная система переходит в режим тестирования и обучения на этапе 52. В течение этого времени указанный эскалатор может переводиться в режим движения без пассажиров на период проверки, продолжительность которого составляет, например, одну минуту. В этот период устанавливают надлежащую взаимозависимость входных сигналов, выполняют ряд кинематических тестов, и устанавливают параметры взаимозависимостей между указанными сигналами. Например, компьютеры могут устанавливать существование выходных сигналов датчиков и подтверждать, что аналогичные датчики подают аналогичные выходные сигналы и что выходные сигналы датчиков ступеней и поручней находятся во взаимозависимости для соответствия логике, описывающей модель эскалатора или движущейся дорожки, включая все варианты передаточных чисел в пределах указанных вариантов реализации. Путем сравнения сигналов MSD1 с MSD2, SPEED1, SPEED2, HRS1 и HRS2 возможно установление целостности сигнала MSD1 образца датчика посредством использования логики, описанной в указанной компьютерной системе. То же применимо к MSD2, MSD1, SPEED1, SPEED2, HRS1 и HRS2, которые устанавливают целостность MSD2.
В течение периода проверки возможно установление надлежащей взаимозависимости между различными сигналами, которая подтверждает механическую целостность, такую как надлежащее функционирование зубчатых передач. Это подтверждает надлежащую и правильную сборку и местоположение указанных датчиков в указанном эскалаторе или движущейся дорожке. Возможна идентификация замены местоположений датчиков и сбоев на выводах указанных датчиков.
Кроме того, может быть определено, что частоты импульсов находятся в пределах допустимого абсолютного диапазона, как определено в данных указанного физического образца.
В режиме обучения возможно идентификация комбинаций сигналов датчиков, что может быть использовано в качестве эталонных образцов при рабочем режиме.
В период проверки система может «обучать» выходные сигналы датчика, при условии корректной работы, логическим построением/образцом, сохраненным в компьютерной системе, и устанавливать диапазон допустимых значений для выходных сигналов. На них ссылаются как на допустимые пороговые значения.
По завершении режима обучения система на этапе 54 переходит в «рабочий» режим. В этом режиме указанная система осуществляет непрерывный контроль корректных взаимозависимостей между входными сигналами и подтверждает их корректность. Например, при запуске система проверяет, равно ли ускорение поручней ускорению ступеней. Если в процессе этого теста происходит сбой, то выводится индикация сбоя привода поручней. Кроме того, возможно выполнение тестов, описанных выше.
В процессе прогона при нормальной скорости возможно выполнение проверки выходных сигналов датчика на фоне эталонных образцов, указывающих на корректное функционирование. Например, возможно задание и тестирование образца для выявления взаимозависимости между двумя сигналами поручней, двумя сигналами ступеней и одним сигналом скорости. Возможно задание и тестирование большого количества возможных образцов, что позволяет указанной системе проводить тестирование на предмет различных возможных состояний сбоев.
Временные характеристики указанных сигналов подвергаются анализу, и такие параметры, как частота, коэффициент замедления и фазовый сдвиг, сохраняются в качестве определений указанных образцов.
При необходимости возможно установление пороговых значений с целью обеспечения допустимых отклонений, например, скорости указанного эскалатора при его большой нагрузке. В этом случае указанная система определяет прохождение теста, когда отношение указанных сигналов, или основанные на них расчетные значения отклоняются не более чем на пороговое значение.
На Фиг.8 показана более подробная блок-схема возможного процесса 100, предназначенного для выполнения в компьютерной системе.
Посредством указанного процесса обеспечено установление целостности сигнала датчика и сохранение эталонных образцов, показывающих целостность, и непрерывное подтверждение целостности сигнала датчика и целостности аппаратного и программного обеспечения на основе входной информации, а именно: образца сигнала датчика, принятого от указанной физической системы, физического образца, предварительно сохраненном в компьютерной системе, и логического образца, предварительно сохраненного в компьютерной системе.
Этап инициализации обозначен 150, режим обучения обозначен 152, а нормальный или рабочий режим обозначен 154.
После инициализации, на этапе 160 указанный процесс определяет, существует ли эталонный образец сигнала датчика. Если нет, то на этапе 162 вводится указанный режим обучения. В этом режиме указанный транспортер запускается и указанная система вводит данные и запоминает указанный образец сигнала датчика на этапе 164. Указанный образец сигнала датчика описывает действительную измеренную информацию о такой физической аппаратной системе, как эскалатор или движущаяся дорожка.
Затем указанный процесс устанавливает целостность сигнала датчика на этапе 166. Для этого процесса указанная система использует предварительно сохраненный физический образец и логический образец.
Указанный физический образец описывает пределы физических параметров вариантов продуктов, в которых применяется указанная система безопасности. Это могут быть такие значения скорости, такие как 0,2-0,9 м/с;
передаточное число, такое как 0,9-1,1; физические допустимые отклонения и требования целостности обеспечения безопасности для каждого сигнала датчика.
Логический образец описывает пределы комбинаций физических параметров, например, ступень длиной 400 мм не должна двигаться быстрее 0,75 м/с; скорость поручня должна быть на 0-2% больше, чем скорость ступени; и различные правила ЕСЛИ… ТО… (IF… THEN…), относящиеся к измеренным параметрам компонентов.
Затем на этапе 168 может быть установлена целостность одного из сигналов датчика, например, MSD1, с использованием других образцов сигналов датчиков и предварительно сохраненных физических и логических образцов. Если установлена целостности обеспечения безопасности первого сигнала датчика, то она сохраняется на этапе 169. Аналогичным образом целостности обеспечения безопасности каждого другого сигнала датчика может быть подтверждена на этапе 170 с использованием других образцов сигналов и физических и логических образцов, и успешные результаты сохраняются на этапе 171.
Если какой-либо сигнал датчика дает сбой при его тестировании на целостность обеспечения безопасности, то режим обучения прерывается на этапе 172, и на этапе 174 на пользовательский интерфейс выводится сообщение с соответствующей информацией для исполнения уполномоченным специалистом.
Если все сигналы датчиков проходят тестирование на целостность обеспечения безопасности, все образцы сигналов датчиков (со статусом TRUE («истина») на этапах 169 и 171) сохраняются на этапе 176 в качестве эталонных образцов, на этапе 178 заканчивается режим обучения и на этапе 180 дается соответствующая индикация.
В следующий раз, когда выполняется указанный процесс, на этапе 160 определяют, что эталонный образец существует, и таким образом система готова к нормальному режиму работы.
Нормальный режим работы начинается на этапе 186 посредством загрузки эталонного образца, который был сохранен на этапе 176. Затем на этапе 188 вводятся указанные сигналы датчиков. На этапе 190 указанные измеренные образцы сигналов датчиков сравниваются с сохраненными эталонными образцами, на этапе 192 подтверждаются достоверности указанных сигналов датчиков, и на этапе 194 устанавливается безопасность аппаратного и программного обеспечения, как описано выше. Если все тесты пройдены, то указанный процесс возвращается от этапа 196 к этапу 188 с целью ввода новых сигналов датчиков.
Если в когда-либо какой-либо из тестов дает сбой на этапе 196, то указанный процесс переходит к этапу 198 для выполнения соответствующего действия, относящегося к безопасности, например, остановки механизма, и на этапе 200 дается индикация.
Очевидно, что указанный режим обучения может быть вновь использован в любое время под контролем уполномоченного специалиста, что осуществляется путем индикации на этапе 184 на то, что нормальный режим работы более не поддерживается, после чего процесс переходит в режим обучения на этапе 164.
Одним из преимуществ настоящего изобретения является то, что система безопасности легко адаптируется к различным или модифицированным установкам посредством режима обучения и посредством программирования новых логических образцов, и может быть легко изменена для осуществления новых проверок безопасности, зачастую без добавления новых аппаратных средств.
С использованием указанных способов возможно получение системы безопасности, вводимой в действие посредством компьютера, с достаточным уровнем целостности обеспечения безопасности, таким как SIL согласно IЕС 61508. Возможно обеспечение многих дополнительных характеристик посредством использования компьютеров, которые принимают выходные сигналы от многих датчиков, например, дополнительные тесты на безопасность, и функций широкого контроля и управления.
Выше описаны различные варианты реализации настоящего изобретения, однако для специалиста в данной области техники очевидно, что настоящее изобретение не ограничено ими, и допустимы различные модификации, остающиеся в пределах объема и формулы настоящего изобретения. Таким образом, необходимо внимательно изучить пункты прилагаемой формулы изобретения с целью определения полного объема настоящего изобретения.
Изобретение относится к способу обеспечения безопасности транспортера. При управлении функцией безопасности транспортера подают сигналы от датчиков, размещенных во взаимодействии с транспортером, к компьютерной системе. Осуществляют эксплуатацию транспортера в режиме обучения. В процессе эксплуатации в режиме обучения определяют в компьютерной системе взаимосвязи между выходными сигналами датчиков и предварительно сохраненной в указанной компьютерной системе логикой, которая описывает физическую геометрию возможных типов транспортеров и их допустимые рабочие характеристики. Определяют взаимосвязи между указанными выходными сигналами датчиков для установления целостности обеспечения безопасности указанных датчиков и сохранение образцов сигналов датчиков в качестве эталонного образца. Далее осуществляют эксплуатацию транспортера в рабочем режиме, в котором контролируют функции безопасности. При работе в рабочем режиме сравнивают в компьютерной системе указанный образец сигналов датчиков с указанным эталонным образцом и с указанной предварительно сохраненной логикой с целью установления целостности обеспечения безопасности указанных датчиков, компьютерной системы и эксплуатации транспортера. Достигается обеспечение высокого уровня безопасности транспортера. 14 з.п. ф-лы, 8 ил.
1. Способ управления функцией безопасности транспортера, включающий:
подачу сигналов от датчиков, размещенных во взаимодействии с транспортером, к компьютерной системе;
эксплуатацию транспортера в режиме обучения;
в процессе эксплуатации в режиме обучения,
определение в компьютерной системе взаимосвязи между выходными сигналами датчиков и предварительно сохраненной в указанной компьютерной системе логикой, которая описывает физическую геометрию возможных типов транспортеров и их допустимые рабочие характеристики, и
определение взаимосвязи между указанными выходными сигналами датчиков для установления целостности обеспечения безопасности указанных датчиков и сохранение образцов сигналов датчиков в качестве эталонного образца; и
последующую эксплуатацию транспортера в рабочем режиме, в котором контролируют функции безопасности; и
при работе в рабочем режиме сравнивание в компьютерной системе указанного образца сигналов датчиков с указанным эталонным образцом и с указанной предварительно сохраненной логикой с целью установления целостности обеспечения безопасности указанных датчиков, компьютерной системы и эксплуатации транспортера.
2. Способ по п.1, включающий: повторяющееся сравнивание, при работе в рабочем режиме, указанного образца сигналов датчика с указанным эталонным образцом и с указанной предварительно сохраненной логикой с целью контроля целостности обеспечения безопасности указанных датчиков, компьютерной системы и эксплуатации транспортера.
3. Способ по п.1, согласно которому каждый образец сигнала датчиков в режиме обучения сравнивают с другими образцами для обеспечения требуемой целостности безопасности указанного сигнала датчика и обрабатывающего блока указанной компьютерной системы.
4. Способ по п.1, включающий
установление пороговых значений с целью обеспечения допустимых отклонений для безопасной эксплуатации транспортера и
определения того, что тест пройден, когда взаимосвязь между указанными сигналами, или основанные на них расчетные значения, не отклоняются на более чем указанное пороговое значение.
5. Способ по п.1, включающий совершение действия, связанного с обеспечением безопасности, если целостность обеспечения безопасности не установлена, в случае отсутствия выходного сигнала датчиков, что само по себе указывает на неисправное состояние.
6. Способ по п.1, согласно которому транспортер представляет собой эскалатор.
7. Способ по п.1 или п.6, согласно которому используют, по меньшей мере, один датчик ступеней, по меньшей мере, один датчик поручней и, по меньшей мере, один датчик скорости.
8. Способ по п.7, согласно которому используют, по меньшей мере, два датчика ступеней, по меньшей мере, два датчика поручней и, по меньшей мере, один датчик скорости.
9. Способ по п.8, согласно которому на основании последовательности выходных сигналов датчиков ступеней, соотнесенных с выходным сигналом датчика скорости, делают заключение о надлежащем функционировании датчиков ступеней.
10. Способ по п.8 или 9, согласно которому на основании последовательности указанного выходного сигнала, по меньшей мере, одного датчика ступеней, соотнесенного с указанным выходным сигналом датчика скорости и датчика поручней, делают заключение о надлежащем функционировании каждого датчика.
11. Способ по п.8 или 9, согласно которому на основании последовательности выходных сигналов датчиков ступеней делают заключение о направлении движения и о целостности указанного идентифицированного направления.
12. Способ по п.8 или 9, согласно которому на основании выходных сигналов датчика(ов) ступеней делают заключение о существовании указанных ступеней.
13. Способ по п.8 или 9, согласно которому на основании соотношения выходного сигнала датчика скорости и отношения времени выходных сигналов датчиков ступеней делают заключение об удлинении и укорочении цепи ступеней эскалатора.
14. Способ по п.8 или 9, согласно которому на основании информации датчика скорости распознают превышение скорости транспортера.
15. Способ по п.8 или 9, согласно которому обеспечивают возможность распознавания разницы между скоростью ступеней и скоростью поручней.
| US 6666319 B2, 23.12.2003 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ ЛИФТА ИЛИ ЭСКАЛАТОРА | 2004 |
|
RU2346877C2 |
| US 6267219 B1, 31.07.2001. | |||

