Область техники
Изобретение относится к устройству оценки высоты посадки транспортного средства и способу оценки высоты посадки транспортного средства для оценки высоты посадки транспортного средства.
Уровень техники
Традиционно, высота посадки транспортного средства варьируется, например, в зависимости от состояния посадки с точки зрения, в числе прочих факторов, числа пассажиров и объема грузов, если таковые имеются, в транспортном средстве. Изменения высоты посадки транспортного средства определяются посредством изменений высоты расположения колеса для колес относительно кузова. Следовательно, высота посадки транспортного средства традиционно определяется на основе фактической высоты посадки транспортного средства, с использованием датчиков высоты посадки транспортного средства, которые определяют высоту расположения колес.
Патентный документ 1: Публикация заявки на патент Японии № 2005-225339.
Сущность изобретения
В транспортных средствах, оснащенных антиблокировочной тормозной системой (ABS), тормозная сила, сформированная посредством тормозного устройства, соответствующего соответствующему колесу, предпочтительно управляется в соответствии с разностью нагрузки между левыми и правыми колесами или разностью нагрузки между передними и задними колесами транспортного средства. В отсутствие датчика нагрузки, который определяет непосредственно состояние нагрузки транспортного средства, оно предположительно может быть определено на основе высоты посадки транспортного средства для транспортного средства. Следовательно, в таком случае требуется множество датчиков высоты посадки транспортного средства, что может приводить к повышению стоимости транспортного средства. Соответственно, существует потребность в схеме, в которой высота посадки транспортного средства может быть оценена на основе входных значений из существующих датчиков.
Следовательно, в свете вышеуказанного, задачей изобретения является создание недорогих устройства оценки высоты посадки транспортного средства и способа оценки высоты посадки транспортного средства, которые обеспечивают возможность оценки высоты посадки транспортного средства.
Для решения указанной задачи, устройство оценки высоты посадки транспортного средства согласно изобретению содержит: средство определения скорости вращения колес для определения скорости вращения колес, которая представляет собой скорость вращения каждого колеса; и средство оценки высоты посадки транспортного средства для оценки высоты посадки транспортного средства на основе соответствующей взаимосвязи между высотой расположения колеса для колеса относительно кузова транспортного средства и значением, которое основано на скорости вращения колес и импульсе неровности дорожного покрытия, который поступает с дорожного покрытия в колесо, и на основе определенной скорости вращения колес для пары колес.
В устройстве оценки высоты посадки транспортного средства, предпочтительно, средство оценки высоты посадки транспортного средства выполняет частотный анализ определенной скорости вращения колес для пары левого и правого колес и вычисляет соответствующие характеристики скорости вращения колес для левых и правых колес на конкретной для амплитудной компоненты частоте; и оценивает, в качестве высоты посадки транспортного средства, относительную высоту одного из левых и правых колес относительно другого из левых и правых колес на основе разности амплитудных компонент скорости вращения левого и правого колес, которая является разностью между вычисленными характеристиками скорости вращения колес, и взаимосвязи, которая является соответствующей взаимосвязью между высотой расположения колес и фактической амплитудной компонентой скорости вращения колес, которая основана на импульсе неровности дорожного покрытия и скорости вращения колес на конкретной для амплитудной компоненты частоте.
Предпочтительно, устройство оценки высоты посадки транспортного средства дополнительно содержит средство определения скорости транспортного средства для определения скорости транспортного средства для транспортного средства; и средство оценки высоты посадки транспортного средства выполняет частотный анализ определенной скорости вращения колес для пары передних и задних колес и вычисляет разность фазовых компонент переднего и заднего колес на конкретной для фазовой компоненты частоте; вычисляет, на основе определенной скорости транспортного средства, входную разность фазовых компонент, которая является разностью фазовых компонент между вводами переднего колеса и заднего колеса; и вычисляет, в качестве высоты посадки транспортного средства, высоту расположения колеса для заднего колеса на основе вычисленной разности фазовых компонент переднего и заднего колес, входной разности фазовых компонент и взаимосвязи, которая является соответствующей взаимосвязью между высотой расположения колес и фактической фазовой компонентой скорости вращения колес, которая основана на импульсе неровности дорожного покрытия и скорости вращения колес на конкретной для фазовой компоненты частоте.
Предпочтительно, устройство оценки высоты посадки транспортного средства дополнительно содержит устройство модификации состояния подвески, которое модифицирует состояние подвески каждого колеса относительно кузова транспортного средства; соответствующая взаимосвязь отличается в зависимости от состояния подвески каждого колеса; и средство оценки высоты посадки транспортного средства оценивает высоту посадки транспортного средства на основе соответствующей взаимосвязи согласно состоянию подвески.
Для решения указанной задачи, способ оценки высоты посадки транспортного средства согласно изобретению включает: этап определения скорости вращения колес, которая представляет собой скорость вращения каждого колеса; и этап оценки высоты посадки транспортного средства на основе соответствующей взаимосвязи между высотой расположения колеса для колеса относительно кузова транспортного средства и значением, которое основано на скорости вращения колес и импульсе неровности дорожного покрытия, который поступает с дорожного покрытия в колесо, и на основе определенной скорости вращения колес для пары колес.
Предпочтительно, способ оценки высоты посадки транспортного средства дополнительно включает в себя этап выполнения частотного анализа определенной скорости вращения колес для пары левого и правого колес и вычисления соответствующих характеристик скорости вращения колес для левых и правых колес на конкретной для амплитудной компоненты частоте; и этап оценки высоты посадки транспортного средства включает в себя оценку, в качестве высоты посадки транспортного средства, относительной высоты одного из левых и правых колес относительно другого из левых и правых колес на основе разности амплитудных компонент скорости вращения левого и правого колес, которая является разностью между вычисленными характеристиками скорости вращения колес, и взаимосвязи, которая является соответствующей взаимосвязью между высотой расположения колес и фактической амплитудной компонентой скорости вращения колес, которая основана на импульсе неровности дорожного покрытия и скорости вращения колес на конкретной для амплитудной компоненты частоте.
Предпочтительно, способ оценки высоты посадки транспортного средства дополнительно включает в себя: этап определения скорости транспортного средства для транспортного средства; этап выполнения частотного анализа определенной скорости вращения колес для пары передних и задних колес и вычисления разности фазовых компонент переднего и заднего колес на конкретной для фазовой компоненты частоте; и этап, на основе определенной скорости транспортного средства, вычисления входной разности фазовых компонент, которая является разностью фазовых компонент между вводами переднего колеса и заднего колеса, и этап оценки высоты посадки транспортного средства включает в себя вычисление, в качестве высоты посадки транспортного средства, высоты расположения колеса для заднего колеса на основе вычисленной разности фазовых компонент переднего и заднего колес, входной разности фазовых компонент и взаимосвязи, которая является соответствующей разностью между высотой расположения колес и фактической фазовой компонентой скорости вращения колес, которая основана на импульсе неровности дорожного покрытия и скорости вращения колес на конкретной для фазовой компоненты частоте.
В способе оценки высоты посадки транспортного средства, предпочтительно, соответствующая взаимосвязь отличается в зависимости от состояния подвески каждого колеса относительно кузова транспортного средства, причем состояние модифицируется посредством устройства модификации состояния подвески; и на этапе оценки высоты посадки транспортного средства, высота посадки транспортного средства оценивается на основе соответствующей взаимосвязи согласно состоянию подвески.
Устройство оценки высоты посадки транспортного средства и способ оценки высоты посадки транспортного средства обеспечивают возможность оценки высоты для высоты посадки транспортного средства на основе скорости вращения колес для пары колес. Следовательно, изобретение предоставляет преимущество обеспечения возможности недорогим способом оценивать высоту посадки транспортного средства, без необходимости датчиков скорости транспортного средства для определения высоты посадки транспортного средства.
Краткое описание чертежей
Фиг. 1 является схемой, иллюстрирующей пример конфигурации устройства оценки высоты посадки транспортного средства согласно вариантам 1 и 2 осуществления.
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей способ оценки высоты посадки транспортного средства посредством устройства оценки высоты посадки транспортного средства согласно варианту 1 осуществления.
Фиг. 3 является схемой, иллюстрирующей взаимосвязь между амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в переднем колесе.
Фиг. 4 является схемой, иллюстрирующей взаимосвязь между амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в заднем колесе.
Фиг. 5 является схемой, иллюстрирующей взаимосвязь между высотой расположения колес и амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия на конкретной для амплитудной компоненты частоте.
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей способ оценки высоты посадки транспортного средства посредством устройства оценки высоты посадки транспортного средства согласно варианту 2 осуществления.
Фиг. 7 является схемой, иллюстрирующей взаимосвязь между фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в переднем колесе.
Фиг. 8 является схемой, иллюстрирующей взаимосвязь между фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в заднем колесе.
Фиг. 9 является схемой, иллюстрирующей взаимосвязь между высотой расположения колес и фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия на конкретной для фазовой компоненты частоте.
Фиг. 10 является схемой, иллюстрирующей пример конфигурации устройства оценки высоты посадки транспортного средства согласно вариантам 3 и 4 осуществления.
Фиг. 11 является блок-схемой последовательности операций способа, иллюстрирующей способ оценки высоты посадки транспортного средства посредством устройства оценки высоты посадки транспортного средства согласно варианту 3 осуществления.
Фиг. 12 является схемой, иллюстрирующей взаимосвязь (небольшое демпфирование) между амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в переднем колесе.
Фиг. 13 является схемой, иллюстрирующей взаимосвязь (большое демпфирование) между амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в переднем колесе.
Фиг. 14 является схемой, иллюстрирующей взаимосвязь (небольшое демпфирование) между амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в заднем колесе.
Фиг. 15 является схемой, иллюстрирующей взаимосвязь (большое демпфирование) между амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в заднем колесе.
Фиг. 16 является схемой, иллюстрирующей взаимосвязь между высотой расположения колес и амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия на конкретной для амплитудной компоненты частоте.
Фиг. 17 является блок-схемой последовательности операций способа, иллюстрирующей способ оценки высоты посадки транспортного средства посредством устройства оценки высоты посадки транспортного средства согласно варианту 4 осуществления.
Фиг. 18 является схемой, иллюстрирующей взаимосвязь (небольшое демпфирование) между фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в переднем колесе.
Фиг. 19 является схемой, иллюстрирующей взаимосвязь (большое демпфирование) между фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в переднем колесе.
Фиг. 20 является схемой, иллюстрирующей взаимосвязь (небольшое демпфирование) между фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в заднем колесе.
Фиг. 21 является схемой, иллюстрирующей взаимосвязь (большое демпфирование) между фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в заднем колесе.
Фиг. 22 является схемой, иллюстрирующей взаимосвязь между высотой расположения колес и фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия на конкретной для фазовой компоненты частоте.
Способы осуществления изобретения
Ниже подробно поясняется изобретение со ссылкой на прилагаемые чертежи. Изобретение не ограничено посредством нижеприведенных вариантов осуществления. Составляющие элементы в вариантах осуществления ниже охватывают элементы, которые могут быть легко задуманы специалистами в данной области техники, а также практически идентичных элементов.
Вариант 1 осуществления изобретения
Фиг. 1 является схемой, иллюстрирующей пример конфигурации устройства оценки высоты посадки транспортного средства согласно вариантам 1 и 2 осуществления. Как проиллюстрировано на фиг. 1, устройство 1-1 оценки высоты посадки транспортного средства согласно варианту осуществления устанавливается в транспортном средстве 10 и конфигурируется посредством включения, по меньшей мере, датчиков 2FL, 2FR, 2RL, 2RR скорости вращения колес, предоставленных, соответственно, согласно переднему левому колесу 11FL, переднему правому колесу 11FR, заднему левому колесу 11RL и заднему правому колесу 11RR, которые являются соответствующими колесами, а также датчика 3 скорости транспортного средства и электрического модуля 4 управления (ECU). Ведущие валы 12FL, 12FR, 12RL, 12RR, соответственно, соединяются с передним левым колесом 11FL, передним правым колесом 11FR, задним левым колесом 11RL и задним правым колесом 11RR, так что ведущие валы 12FL, 12FR, 12RL, 12RR поддерживаются с возможностью вращения относительно кузова 14 посредством соответствующих устройств 13FL, 13FR, 13RL, 13RR подвески. В данном документе, конфигурации устройств 13FL, 13FR подвески, соответствующих передним левому и правому колесам 11FL, 11FR, являются идентичными, и конфигурации устройств 13RL, 13RR подвески, соответствующих задним левому и правому колесам 11RL, 11RR, аналогично являются идентичными.
Датчики 2FL, 2FR, 2RL, 2RR скорости вращения колес определяют скорость VFL вращения переднего левого колеса, скорость VFR вращения переднего правого колеса, скорость VRL вращения заднего левого колеса и скорость VRR вращения заднего правого колеса (м/с), которые являются соответствующими скоростями вращения колес 11FL-11RR. Скорости VFL-VRR вращения колес, определенные посредством датчиков 2FL-2RR скорости вращения колес, вводятся, например, посредством системы CAN-связи в ECU 4, который получает после этого скорости VFL-VRR вращения колес.
Датчик 3 скорости транспортного средства определяет скорость v транспортного средства (м/с), которая представляет собой скорость транспортного средства 10. Определенная скорость v транспортного средства вводится в ECU 4, как и в случае датчиков 2FL-2RR скорости вращения колес, после чего ECU 4 получает скорость v транспортного средства. Датчик 3 скорости транспортного средства предоставляется на вращающемся теле, таком как выходной вал или дифференциал (не показаны) в тракте передачи мощности, который передает на ведущие колеса (например, задние колеса 11RL, 11RR) мощность, сформированную посредством источника мощности (например, двигателя, электромотора и т.п.), так что датчик 3 скорости транспортного средства определяет скорость v транспортного средства на основе частоты вращения вращающегося тела. Датчик 3 скорости транспортного средства может представлять собой датчики 2FL-2RR скорости вращения колес, когда скорость v транспортного средства определяется на основе скоростей VFL-VRR вращения колес, определенных посредством датчиков 2FL-2RR скорости вращения колес. Альтернативно, датчик 3 скорости транспортного средства может представлять собой датчик, который определяет данные позиции транспортного средства 10, обозначаемые посредством GPS, когда скорость v транспортного средства определяется на основе изменений определенных данных позиции транспортного средства 10.
ECU 4 управляет, например, тормозной и движущей силами и поведением транспортного средства 10. ECU 4 имеет модуль 41 оценки высоты посадки транспортного средства, который выступает в качестве средства оценки высоты посадки транспортного средства. В варианте осуществления, модуль 41 оценки высоты посадки транспортного средства оценивает, в качестве высоты посадки транспортного средства, относительную высоту расположения колес для одного колеса относительно другого колеса в паре левого и правого колес, например, разность ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами, которая представляет собой относительную высоту расположения колес для переднего правого колеса 11FR относительно переднего левого колеса 11FL, или разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами, которая представляет собой относительную высоту расположения колес для заднего правого колеса 11RR относительно заднего левого колеса 11RL, на основе скорости VFL вращения переднего левого колеса и скорости VFR вращения переднего правого колеса для передних левого и правого колес 11FL, 11FR (далее называемых просто "11FLR"), представляющих собой пару левого и правого колес, или скорости VRL вращения заднего левого колеса и скорости VRR вращения заднего правого колеса для задних левого и правого колес 11RL, 11RR (далее называемых просто "11RLR"), представляющих собой пару левого и правого колес, и на основе соответствующей взаимосвязи между высотой h расположения колес (мм) для колес 11 относительно кузова 14 и нижеописанным значением, которое основано на скорости вращения колес и на импульсе неровности дорожного покрытия (м) в вертикальном направлении, который поступает с дорожного покрытия в колеса. В данном документе, высота h расположения колеса (мм) для колеса 11 относительно кузова 14 обозначает длину, в вертикальном направлении, от осей колес 11FL-11RR до соединительных секций устройств 13FL-13RR подвески с кузовом 14. В передних колесах 11FL, 11FR, например, высота h расположения колес (мм) является длиной, в вертикальном направлении, от осей передних колес 11FL, 11FR до соединительных секций, в которых втулка № 2 нижнего рычага каждого устройства 13FL, 13FR подвески переднего колеса соединяется с кузовом 14. В задних колесах 11RL, 11RR, например, высота h расположения колес (мм) является длиной, в вертикальном направлении, от осей задних колес 11RL, 11RR до соединительных секций нижних рычагов устройств 13RL, 13RR подвески передних колес с кузовом 14. Аппаратная конфигурация ECU 4 включает в себя, например, главным образом центральный процессор (CPU), который выполняет вычисления, запоминающее устройство (оперативное запоминающее устройство (ОЗУ), например, статическое оперативное запоминающее устройство (СОЗУ) и/или постоянное запоминающее устройство (ПЗУ), к примеру, электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ), которое сохраняет программы и информацию), и интерфейс ввода-вывода. ECU 4 является идентичным ECU, установленным в традиционных транспортных средствах, и, следовательно, его подробное пояснение опускается. ECU 4 имеет электрически подключенный, например, ECU 5 двигателя, который управляет источником приведения в движение, смонтированным на транспортном средстве 10 (не показан на чертежах), например, двигателем, ECU 6 тормоза, который управляет тормозным устройством, и ECU 7 рулевого управления, который управляет величиной усиления при рулении.
Ниже поясняется способ оценки высоты посадки транспортного средства посредством устройства 1-1 оценки высоты посадки транспортного средства согласно варианту 1 осуществления. Способ оценки разности ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами и способ оценки разности ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами являются практически идентичными, и, следовательно, в данном документе, главным образом, поясняется способ оценки разности ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами. Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей способ оценки высоты посадки транспортного средства посредством устройства оценки высоты посадки транспортного средства согласно варианту 1 осуществления. Фиг. 3 является схемой, иллюстрирующей взаимосвязь между амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в переднем колесе. Фиг. 4 является схемой, иллюстрирующей взаимосвязь между амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в заднем колесе. Фиг. 5 является схемой, иллюстрирующей взаимосвязь между высотой расположения колес и амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия на конкретной для амплитудной компоненты частоте. Фиг. 3, на котором ось ординат представляет амплитудную компоненту (log (G/Z)) скорости вращения колес/импульса неровности дорожного покрытия (дБ), а ось абсцисс представляет частоту f (Гц), является схемой, иллюстрирующей амплитудную компоненту (log (GFR/ZFR)) скорости вращения переднего правого колеса/импульса неровности дорожного покрытия, частоту f и высоту hFR расположения переднего правого колеса для переднего правого колеса 11FR, т.е. является схемой характеристической линии амплитудной компоненты скорости вращения колес для переднего правого колеса 11FR. Фиг. 4, на котором ось ординат представляет амплитудную компоненту (log (G/Z)) скорости вращения колес/импульса неровности дорожного покрытия, а ось абсцисс представляет частоту f, является схемой, иллюстрирующей взаимосвязь между амплитудной компонентой (log (GRR/ZRR)) скорости вращения заднего правого колеса/импульса неровности дорожного покрытия, частотой f и высотой hRR расположения заднего правого колеса для заднего правого колеса 11RR, т.е. является схемой характеристической линии амплитудной компоненты скорости вращения колес для заднего правого колеса 11RR. Фиг. 5, на котором ось ординат представляет амплитудную компоненту (log (G/Z)) скорости вращения колес/импульса неровности дорожного покрытия, а ось абсцисс представляет высоту h расположения колес, является схемой, иллюстрирующей взаимосвязь между высотой hFR расположения переднего правого колеса и амплитудной компонентой log (GFR/ZFR) скорости вращения колес/импульса неровности дорожного покрытия для переднего правого колеса 11FR на характеристической для амплитудной компоненты частоте fGF для передних левого и правого колес FLR.
Во-первых, модуль 41 оценки высоты посадки транспортного средства ECU 4 получает скорость VFL вращения переднего левого колеса и скорость VFR вращения переднего правого колеса (этап ST11). В данном документе, ECU 4 получает скорость VFL вращения переднего левого колеса и скорость VFR вращения переднего правого колеса для передних левого и правого колес 11FLR, из определенных скоростей VFL-VRR вращения колес. Чтобы оценивать разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами, ECU 4 получает скорость VRL вращения заднего левого колеса и скорость VRR вращения заднего правого колеса для задних левого и правого колес 11RLR.
Затем, модуль 41 оценки высоты посадки транспортного средства вычисляет амплитудную компоненту (log GFL) скорости вращения переднего левого колеса и амплитудную компоненту (log GFR) скорости вращения переднего правого колеса для передних левого и правого колес 11FLR на конкретной для амплитудной компоненты частоте fGF, на основе полученной скорости VFL вращения переднего левого колеса и скорости VFR вращения переднего правого колеса (этап ST12). В данном документе, модуль 41 оценки высоты посадки транспортного средства вычисляет характеристику (log GFL) скорости вращения переднего левого колеса и характеристику (log GFR) скорости вращения переднего правого колеса для передних левого и правого колес 11FLR на конкретной для амплитудной компоненты частоте fGF посредством частотного анализа, например, на основе FFT. Конкретная для амплитудной компоненты частота fGF представляет собой частоту, на которой амплитудная компонента (log (GFL/ZFL)) скорости вращения переднего левого колеса/импульса неровности дорожного покрытия и амплитудная компонента (log (GFR/ZFR)) скорости вращения переднего правого колеса/импульса неровности дорожного покрытия, соответственно, изменяются с высотой hFL расположения переднего левого колеса и высотой hFR расположения переднего правого колеса. В варианте осуществления, конкретная для амплитудной компоненты частота fGF обозначает частоту, на которой справедлива характеристическая функция амплитудной компоненты, описанная ниже. Чтобы оценивать разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами, модуль 41 оценки высоты посадки транспортного средства вычисляет характеристику (log GRL) скорости вращения заднего левого колеса и характеристику (log GRR) скорости вращения заднего правого колеса для задних левого и правого колес 11RLR на конкретной для амплитудной компоненты частоте fGR. В данном документе, конкретная для амплитудной компоненты частота fGR представляет собой частоту, на которой амплитудная компонента (log (GRL/ZRL)) скорости вращения заднего левого колеса/импульса неровности дорожного покрытия и амплитудная компонента (log (GRR/ZRR)) скорости вращения заднего правого колеса/импульса неровности дорожного покрытия, соответственно, изменяются с высотой hRL расположения заднего левого колеса и высотой hRR расположения заднего правого колеса. В варианте осуществления, конкретная для амплитудной компоненты частота fGR представляет собой частоту, на которой справедлива характеристическая функция амплитудной компоненты, описанная ниже. Иными словами, каждая конкретная для амплитудной компоненты частота fG представляет собой частоту, на которой амплитудная компонента (log (G/F)) скорости вращения колес/импульса неровности дорожного покрытия варьируется в соответствии с высотой h расположения колес, и обозначает частоту, на которой справедлива характеристическая функция амплитудной компоненты.
Затем, модуль 41 оценки высоты посадки транспортного средства вычисляет разность ΔGF амплитудных компонент скорости вращения передних левого и правого колес на основе вычисленной характеристики (log GFL) скорости вращения переднего левого колеса и характеристики (log GFR) скорости вращения переднего правого колеса (этап ST13). В данном документе, модуль 41 оценки высоты посадки транспортного средства вычисляет, в качестве разности ΔGF амплитудных компонент скорости вращения передних левого и правого колес, значение, получающееся в результате вычитания характеристики (log GFR) скорости вращения переднего правого колеса из характеристики (log GFL) скорости вращения переднего левого колеса, т.е. (ΔGF=log GFL-log GFR). Чтобы оценивать разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами, модуль 41 оценки высоты посадки транспортного средства вычисляет, в качестве разности ΔGR амплитудных компонент скорости вращения задних левого и правого колес, значение, получающееся в результате вычитания характеристики (log GRR) скорости вращения заднего правого колеса из характеристики (log GRL) скорости вращения заднего левого колеса, т.е. (ΔGR=log GRL-log GRR).
Затем, модуль 41 оценки высоты посадки транспортного средства вычисляет разность ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами на основе вычисленной разности ΔGF амплитудных компонент скорости вращения передних левого и правого колес (этап ST14). Модуль 41 оценки высоты посадки транспортного средства вычисляет в данном документе разность ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами на основе разности ΔGF амплитудных компонент скорости вращения передних левого и правого колес и нижеприведенного выражения (1). В выражении, aF является константой, соответствующей передним левому и правому колесам 11FLR на конкретной для амплитудной компоненты частоте fGF. Чтобы оценивать разность ΔHRLR высоты посадки транспортного средства между правыми колесами, модуль 41 оценки высоты посадки транспортного средства вычисляет разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами на основе разности ΔGR амплитудных компонент скорости вращения задних левого и правого колес и на основе нижеприведенного выражения (2). В выражении, aR является константой, соответствующей задним левому и правому колесам 11RLR на конкретной для амплитудной компоненты частоте fGR.
ΔHFLR=ΔGF/aF (1)
ΔHRLR=ΔGR/aR (2)
Ниже поясняются причины, по которым выражения (1) и (2) обеспечивают возможность вычисления разности ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами и разности ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами. Поверхность дороги (не показана), вдоль которой движется транспортное средство 10, имеет неровности в вертикальном направлении. Соответственно, на скорости VFL-VRR вращения колес оказывает влияние импульс неровности дорожного покрытия, в вертикальном направлении, введенный от дорожного покрытия. Иными словами, характеристика (log G) скорости вращения колес охватывает характеристику (log Z) импульса неровности дорожного покрытия, которая основана на импульсе неровности дорожного покрытия. При вычитании характеристики (log Z) импульса неровности дорожного покрытия из характеристики (log G) скорости вращения колес, извлекается амплитудная компонента скорости вращения колес/импульса неровности дорожного покрытия (log G-log Z=log (G/Z)), представляющий собой значение на основе скоростей VFL-VRR вращения колес и импульса неровности дорожного покрытия, который поступает с дорожного покрытия в колеса 11FL-11RR, т.е. извлекается фактическая амплитудная компонента скорости вращения колес, который основан только на скорости вращения колес. Как проиллюстрировано на фиг. 3, разности в характеристической линии амплитудной компоненты переднего правого колеса 11FR возникают или нет, в зависимости от частоты f, между случаем, в котором высота hFR расположения переднего правого колеса является высокой (B1, обозначается посредством пунктирной линии) и низкой (C1, обозначается посредством штрихпунктирной линии с двумя точками) относительно опорного значения (A1, обозначается посредством сплошной линии). Как проиллюстрировано на фиг. 4, разности в характеристической линии амплитудной компоненты заднего правого колеса 11RR возникают или нет, в зависимости от частоты f, между случаем, в котором высота hRR расположения заднего правого колеса является высокой (E1, обозначается посредством пунктирной линии) и низкой (F1, обозначается посредством штрихпунктирной линии с двумя точками) относительно опорного значения (D1, обозначается посредством сплошной линии). Иными словами, амплитудные компоненты (log G/Z) скорости вращения колес/импульса неровности дорожного покрытия для колес 11FL-11RR отличаются в зависимости от изменений по высоте h расположения колес, т.е. в зависимости от изменений геометрии, как проиллюстрировано на обоих чертежах. Изменения геометрии влияют на неподрессоренную вибрационную характеристику. Следовательно, передаточная взаимосвязь скорости вращения колес и импульса неровности дорожного покрытия для колес 11FL-11RR, т.е. характеристика скорости вращения колес, отличается в зависимости от высоты h расположения колес.
Во взаимосвязи между амплитудной компонентой (log (GFR/ZFR)) скорости вращения переднего правого колеса/импульса неровности дорожного покрытия для передних левого и правого колес 11FLR на конкретной для амплитудной компоненты частоте fGF, т.е. фактической характеристикой скорости вращения переднего правого колеса, и высотой hFR расположения переднего правого колеса, амплитудная компонента (log (GFR/ZFR)) скорости вращения переднего правого колеса/импульса неровности дорожного покрытия снижается по мере того, как увеличивается высота hFR расположения переднего правого колеса, как указано посредством I1 на фиг. 5. Иными словами, взаимосвязь между высотой h расположения колес и амплитудной компонентой (log (G/Z)) скорости вращения колес/импульса неровности дорожного покрытия на конкретной для амплитудной компоненты частоте fG является такой, что амплитудная компонента (log (G/Z)) скорости вращения колес/импульса неровности дорожного покрытия увеличивается и уменьшается согласно увеличению и уменьшению высоты h расположения колес. Конкретная для амплитудной компоненты частота fG задается в данном документе равной такой частоте, что взаимосвязь между амплитудной компонентой (log (G/Z)) скорости вращения колес/импульса неровности дорожного покрытия и высотой h расположения колес, т.е. взаимосвязь между фактической амплитудной компонентой скорости вращения колес и высотой h расположения колес, может быть представлена посредством характеристической функции (a*h+b) амплитудной компоненты, обозначенной посредством I1 на фиг. 5 (a и b являются константами конкретной для амплитудной компоненты частоты fG). В варианте осуществления, соответствующая взаимосвязь между высотой h расположения колес и значением на основе скоростей VFL-VRR вращения колес и импульса неровности дорожного покрытия является взаимосвязью между высотой h расположения колес и фактической амплитудной компонентой скорости вращения колес на конкретной для амплитудной компоненты частоте fG. В таком случае, взаимосвязь между высотой h расположения колес и амплитудной компонентой (log (G/Z)) скорости вращения колес/импульса неровности дорожного покрытия на конкретной для амплитудной компоненты частоте fG задается посредством нижеприведенного выражения (3).
log (G/Z)=a*h+b (3)
В данном документе, импульсы неровности дорожного покрытия, которые вводятся в переднее левое колесо 11FL, и импульсы неровности дорожного покрытия, которые вводятся в переднее правое колесо 11FR, предположительно могут быть идентичными друг другу в долгосрочной перспективе, и, следовательно, идентичные импульсы неровности дорожного покрытия вводятся в передние левое и правое колеса 11FLR. Иными словами, характеристика (log GFL) скорости вращения переднего левого колеса и характеристика (log GFR) скорости вращения переднего правого колеса охватывают характеристику (log ZF) импульсов неровности дорожного покрытия, соответствующую передним левому и правому колесам 11FLR. Импульсы неровности дорожного покрытия, которые вводятся в заднее левое колесо 11RL, и импульсы неровности дорожного покрытия, которые вводятся в заднее правое колесо 11RR, предположительно могут быть идентичными друг другу в долгосрочной перспективе, и, следовательно, идентичные импульсы неровности дорожного покрытия вводятся в задние левое и правое колеса 11RLR. Иными словами, характеристика (log GRL) скорости вращения заднего левого колеса и характеристика (log GRR) скорости вращения заднего правого колеса охватывают амплитудную компоненту (log ZR) импульсов неровности дорожного покрытия, соответствующий задним левому и правому колесам 11RLR. В отношении выражения (3) взаимосвязь между высотой h расположения колес и амплитудной компонентой (log (G/Z)) скорости вращения колес/импульса неровности дорожного покрытия каждого из колес 11FL-11RR на конкретной для амплитудной компоненты частоте fG может задаваться посредством нижеприведенных выражений (4)-(7). В выражении, bF является константой, соответствующей передним левому и правому колесам 11FLR на конкретной для амплитудной компоненты частоте fGF, и bR является константой, соответствующей задним левому и правому колесам 11RLR на конкретной для амплитудной компоненты частоте fGR.
log (GFL/ZF)=aF*hFL+bF (4)
log (GFR/ZF)=aF*hFR+bF (5)
log (GRL/ZR)=aR*hRL+bR (6)
log (GRR/ZR)=aR*hRR+bR (7)
После расчета разности ΔGF амплитудных компонент скоростей вращения передних левого и правого колес на основе вышеприведенных выражений (4) и (5) в передних левом и правом колесах 11FLR, влияние импульса неровности дорожного покрытия, который вводится в передние левое и правое колеса 11FLR, может исключаться, как задано в нижеприведенном выражении (8). Аналогично, после расчета разности ΔGR амплитудных компонент скоростей вращения задних левого и правого колес на основе выражения (6) и (7) в задних левом и правом колесах 11RLR, влияние импульса неровности дорожного покрытия, который вводится в задние левое и правое колеса 11RLR, может исключаться, как задано в нижеприведенном выражении (9). Разность между высотой hFL расположения переднего левого колеса и высотой hFR расположения переднего правого колеса является разностью ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами, как задано в нижеприведенном выражении (10). Следовательно, разность между двумя значениями амплитудной компоненты (log (GFL/ZFL)) скорости вращения переднего левого колеса/импульса неровности дорожного покрытия и амплитудной компоненты (log (GFR/ZFR)) скорости вращения переднего правого колеса/импульса неровности дорожного покрытия, на оси ординат, вдоль характеристической линии амплитудной компоненты, обозначенной посредством I1 на фиг. 5, дает в результате разность ΔGF амплитудных компонент скорости вращения передних левого и правого колес, в то время как разность на оси абсцисс дает в результате разность ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами. Разность между высотой hRL расположения заднего левого колеса и высотой hRR расположения заднего правого колеса является разностью ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами, как проиллюстрировано в выражении (11). Следовательно, разность ΔG амплитудных компонент скорости вращения левого и правого колес основана на высоте расположения одного колеса относительно высоты расположения другого колеса в паре левого и правого колес, т.е. основана на разности ΔH высоты посадки транспортного средства между левыми-правыми колесами.
ΔGF=log GFR-log GFL=aF(hFL-hFR) (8)
ΔGR=log GRR-log GRL=aR(hRL-hRR) (9)
ΔHFLR=hFL-hFR (10)
ΔHRLR=hRL-hRR (11)
В устройстве 1-1 оценки высоты посадки транспортного средства согласно варианту осуществления, разность ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами может быть оценена, в качестве высоты посадки транспортного средства, на основе взаимосвязи между высотой h расположения колес и амплитудными компонентами (log (G/Z)) скорости вращения колес/импульса неровности дорожного покрытия для передних левого и правого колес 11FLR на конкретной для амплитудной компоненты частоте fGF, т.е. фактической амплитудной компонентой скорости вращения колес, с использованием, в качестве входных параметров, скорости VFL вращения переднего левого колеса и скорости VFR вращения переднего правого колеса из пары передних левого и правого колес 11FLR. Разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами может быть оценена, в качестве высоты посадки транспортного средства, на основе взаимосвязи между высотой h расположения колес и амплитудными компонентами (log (G/Z)) скорости вращения колес/импульса неровности дорожного покрытия задних левого и правого колес 11RLR на конкретной для амплитудной компоненты частоте fGR, т.е. фактической амплитудной компонентой скорости вращения колес, с использованием, в качестве входных параметров, скорости VRL вращения заднего левого колеса и скорости VRR вращения заднего правого колеса из пары задних левого и правого колес 11RLR. Соответственно, нет необходимости в датчике высоты посадки транспортного средства, который определяет высоту посадки транспортного средства в колесах 11FL-11RR, и в силу этого новые датчики не должны добавляться для того, чтобы оценивать высоту посадки транспортного средства в случае транспортного средства 10, которое уже оснащено датчиками 2FL-2RR скорости вращения колес, чтобы выполнять управление торможением, выполняемое посредством ABS, и управление поведением транспортного средства 10. Следовательно, появляется возможность недорогим способом оценивать разность высоты посадки транспортного средства между левыми и правыми колесами в транспортном средстве 10. Если разность высоты посадки транспортного средства между левыми и правыми колесами может быть оценена, и устройства подвески левых и правых колес имеют идентичную конфигурацию, то разность ΔWFLR весов передних левого и правого колес и разность ΔWRLR весов задних левого и правого колес могут быть вычислены и оценены, в качестве параметров, извлекаемых из высоты посадки транспортного средства, посредством умножения жесткости KF упругого элемента подвески, приведенной к колесу, для устройств 13FL, 13FR подвески передних левого и правого колес 11FLR, и жесткости KR упругого элемента подвески, приведенной к колесу, для устройств 13RL, 13RR подвески задних левого и правого колес 11RLR, на разность ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами и разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами, соответственно. Иными словами, разность для левого и правого колес в весе транспортного средства может быть оценена, разность высоты посадки транспортного средства между задними левым и правым колесами может быть использована в качестве входного параметра управления торможением, например, для ABS, или управления поведением транспортного средства 10, и высокоточное управление в соответствии с состоянием движения транспортного средства 10 обеспечивается посредством оценки разности ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами и разности ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами.
В варианте осуществления, модуль 41 оценки высоты посадки транспортного средства оценивает разность ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами и разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами, но изобретение не ограничено этим, и модуль 41 оценки высоты посадки транспортного средства может оценивать одно из вышеприведенного. Например, разность высоты посадки транспортного средства между левыми и правыми колесами для передних левого и правого колес 11FLR больше, например, во время поворота транспортного средства 10, разности для задних левого и правого колес 11RLR, и, следовательно, модуль 41 оценки высоты посадки транспортного средства может оценивать только разность ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами.
Вариант 2 осуществления изобретения
Ниже поясняется устройство оценки высоты посадки транспортного средства согласно варианту 2 осуществления. Базовая конфигурация устройства 1-2 оценки высоты посадки транспортного средства согласно варианту 2 осуществления является идентичной базовой конфигурации устройства 1-1 оценки высоты посадки транспортного средства согласно варианту 1 осуществления, и, следовательно, его конфигурация не поясняется повторно. Модуль 41 оценки высоты посадки транспортного средства в ECU 4 устройства 1-2 оценки высоты посадки транспортного средства согласно варианту 2 осуществления оценивает, в качестве высоты посадки транспортного средства, высоту hRR расположения заднего правого колеса для заднего колеса в паре передних и задних колес, на основе скорости VFR вращения переднего правого колеса и скорости VRR вращения заднего правого колеса для правых переднего и заднего колес 11FR, 11RR (далее называемых просто "правыми передним и задним колесами 11RFR"), представляющих собой пару переднего и заднего колес, и на основе соответствующей взаимосвязи между высотой h расположения колес (мм) и нижеописанным значением, которое основано на скорости вращения колес и на импульсе неровности дорожного покрытия в вертикальном направлении, который поступает с дорожного покрытия в колеса.
Ниже поясняется способ оценки высоты посадки транспортного средства посредством устройства 1-2 оценки высоты посадки транспортного средства согласно варианту 2 осуществления. Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей способ оценки высоты посадки транспортного средства посредством устройства оценки высоты посадки транспортного средства согласно варианту 2 осуществления. Фиг. 7 является схемой, иллюстрирующей взаимосвязь между фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в переднем колесе. Фиг. 8 является схемой, иллюстрирующей взаимосвязь между фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в заднем колесе. Фиг. 9 является схемой, иллюстрирующей взаимосвязь между высотой расположения колес и фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия на конкретной для фазовой компоненты частоте. Фиг. 7, на котором ось ординат представляет фазовую компоненту скорости вращения колес/импульса неровности дорожного покрытия (градусов), а ось абсцисс представляет частоту f (Гц), является схемой, иллюстрирующей взаимосвязь между фазовой компонентой скорости вращения переднего правого колеса/импульса неровности дорожного покрытия, частотой f и высотой hFR расположения переднего правого колеса для переднего правого колеса 11FR, т.е. схема характеристической линии фазовой компоненты скорости вращения колес для переднего правого колеса 11FR. Фиг. 8, на котором ось ординат представляет фазовую компоненту скорости вращения колес/импульса неровности дорожного покрытия, а ось абсцисс представляет частоту f, является схемой, иллюстрирующей взаимосвязь между фазовой компонентой скорости вращения заднего правого колеса/импульса неровности дорожного покрытия, частотой f и высотой hRR расположения заднего правого колеса для заднего правого колеса 11RR, т.е. является схемой характеристической линии фазовой компоненты скорости вращения колес для заднего правого колеса 11RR. Фиг. 9, на котором ось ординат представляет фазовую компоненту скорости вращения колес/импульса неровности дорожного покрытия, а ось абсцисс представляет высоту h расположения колес, является схемой, иллюстрирующей взаимосвязь между высотой hFR расположения переднего правого колеса и фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия для переднего правого колеса 11FR и взаимосвязь между высотой hRR расположения заднего правого колеса и фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия заднего правого колеса 11RR, на характеристической для фазовой компоненты частоте fPR.
Во-первых, модуль 41 оценки высоты посадки транспортного средства ECU 4 получает скорость VFR вращения переднего правого колеса и скорость VRR вращения заднего правого колеса (этап ST21). В данном документе, модуль 41 оценки высоты посадки транспортного средства получает скорость VFR вращения переднего правого колеса и скорость VRR вращения заднего правого колеса для правых переднего и заднего колес 11RFR, из определенных скоростей VFL-VRR вращения колес.
Затем, модуль 41 оценки высоты посадки транспортного средства вычисляет разность ΔPWR фазовых компонент скорости вращения правых переднего и заднего колес для правых переднего и заднего колес 11RFR на конкретной для фазовой компоненты частоте fPR на основе полученной скорости VFR вращения переднего правого колеса и скорости VRR вращения заднего правого колеса (этап ST22). В данном документе, модуль 41 оценки высоты посадки транспортного средства вычисляет фазовую компоненту скорости вращения переднего правого колеса и фазовую компоненту скорости вращения заднего правого колеса для правых переднего и заднего колес 11RFR на конкретной для фазовой компоненты частоте fPR посредством частотного анализа, например, на основе FFT и вычисляет разность ΔPWR фазовых компонент скорости вращения правых переднего и заднего колес на основе нижеприведенного выражения (12). В данном документе, FFT (скорость вращения переднего правого колеса) является фазовой компонентой скорости вращения переднего правого колеса, и FFT (скорость вращения заднего правого колеса) является фазовой компонентой скорости вращения заднего правого колеса. Конкретная для фазовой компоненты частота fPR представляет собой частоту, на которой фазовая компонента скорости вращения переднего левого колеса/импульса неровности дорожного покрытия не изменяется с высотой hFL расположения переднего правого колеса, а фазовая компонента скорости вращения заднего правого колеса/импульса неровности дорожного покрытия изменяется с высотой hRR расположения заднего правого колеса. Иными словами, конкретная для фазовой компоненты частота fP представляет собой частоту, на которой фазовая компонента скорости/импульса неровности дорожного покрытия для переднего колеса не изменяется с ВЧ высоты переднего колеса, а фазовая компонента скорости/импульса неровности дорожного покрытия заднего колеса изменяется в соответствии с высотой hR расположения заднего колеса. В данном документе, импульс неровности дорожного покрытия, который вводится в переднее правое колесо 11FR, и импульс неровности дорожного покрытия, который вводится в заднее правое колесо 11RR, предположительно могут быть идентичными друг другу в долгосрочной перспективе, и, следовательно, идентичные импульсы неровности дорожного покрытия вводятся в правые переднее и заднее колеса 11RFR. Иными словами, фазовая компонента скорости вращения переднего правого колеса и фазовая компонента скорости вращения заднего правого колеса включают в себя фазовую компоненту импульса неровности дорожного покрытия, соответствующую правым переднему и заднему колесам 11RFR. Следовательно, фазовая компонента импульса неровности дорожного покрытия для переднего правого колеса и фазовая компонента импульса неровности дорожного покрытия заднего правого колеса компенсируются посредством вычисления разности ΔPWR фазовых компонент скорости вращения правых переднего и заднего колес.
ΔPWR=Phase(FFT(скорость вращения заднего правого колеса)/FFT(скорость вращения переднего правого колеса)) (12)
Затем, модуль 41 оценки высоты посадки транспортного средства вычисляет входную разность ΔPU фазовых компонент (этап ST23). Модуль 41 оценки высоты посадки транспортного средства вычисляет входную разность ΔPU фазовых компонент на основе колесной базы L (длины между правыми передним и задним колесами 11RFR) транспортного средства 10, скорости v транспортного средства, характеристической частоты fPR фазовой компоненты и нижеприведенного выражения (13). Задние колеса 11RL, 11RR демонстрируют отставание по фазе относительно передних колес 11FL, 11FR, которое зависит от колесной базы L (длины между правыми передним и задним колесами 11RFR) и от скорости v транспортного средства. Таким образом, входная разность ΔPU фазовых компонент вычисляется в данном документе для того, чтобы исключать, из разности ΔPWR фазовых компонент скорости вращения правых переднего и заднего колес, входную разность ΔPU фазовых компонент, которая является компонентом отставания по фазе.
ΔPU=L/v*2πfPR (13)
Затем, модуль 41 оценки высоты посадки транспортного средства вычисляет высоту hRR расположения заднего правого колеса на основе вычисленной разности ΔPWR фазовых компонент скорости вращения правых переднего и заднего колес и входной разности ΔPU фазовых компонент (этап ST24). Модуль 41 оценки высоты посадки транспортного средства вычисляет высоту hRR расположения заднего правого колеса на основе разности ΔPWR фазовых компонент скорости вращения правых переднего и заднего колес, входной разности ΔPU фазовых компонент и нижеприведенного выражения (14). В данном документе, ΔPM(h) является передаточной функцией скорости вращения передних и задних колес.
hRR=ΔPM -1(ΔPWR-ΔPU) (14)
Ниже поясняется причина, по которой высота hRR расположения заднего правого колеса может быть вычислена на основе выражения (14). Поверхность дороги (не показана), вдоль которой движется транспортное средство 10, имеет неровности в вертикальном направлении. Соответственно, на скорости VFL-VRR вращения колес оказывает влияние импульс неровности дорожного покрытия, в вертикальном направлении, введенный от дорожного покрытия. Иными словами, фазовая компонента скорости вращения колес включает в себя фазовую компоненту импульса неровности дорожного покрытия, которая основана на импульсе неровности дорожного покрытия. При вычитании фазовой компоненты импульса неровности дорожного покрытия из фазовой компоненты скорости вращения колес, извлекается фазовая компонента скорости вращения колес/импульса неровности дорожного покрытия, представляющая собой значение, которое основано на скоростях VFL-VRR вращения колес и импульсе неровности дорожного покрытия, который поступает с дорожного покрытия в колеса 11FL-11RR, т.е. извлекается фактическая фазовая компонента скорости вращения колес, которая основана только на скорости вращения колес. Как проиллюстрировано на фиг. 7, разности в характеристической линии фазовой компоненты переднего правого колеса 11FR возникают или нет, в зависимости от частоты f, между случаем, в котором высота hFL расположения переднего правого колеса является высокой (L1, обозначается посредством пунктирной линии) относительно опорного значения (K1, обозначается посредством сплошной линии), и случаем, в котором высота hFL расположения переднего правого колеса является низкой (M1, обозначается посредством штрихпунктирной линии с двумя точками) относительно опорного значения. Как проиллюстрировано на фиг. 8, разности в характеристической линии фазовой компоненты заднего правого колеса 11RR возникают или нет, в зависимости от частоты f, между случаем, в котором высота hRR расположения заднего правого колеса является высокой (O1, обозначается посредством пунктирной линии) относительно опорного значения (N1, обозначается посредством сплошной линии), и случаем, в котором высота hRR расположения заднего правого колеса является низкой (Q1, обозначается посредством штрихпунктирной линии с двумя точками) относительно опорного значения. Как и в случае с амплитудной компонентой, фазовая компонента скорости вращения колес/импульса неровности дорожного покрытия каждого из колес 11FL-11RR отличается в зависимости от изменений по высоте h расположения колес, т.е. в зависимости от изменений геометрии, как проиллюстрировано на обоих чертежах. Следовательно, передаточная взаимосвязь между скоростью вращения колес и импульсом неровности дорожного покрытия для колес 11FL-11RR, т.е. фазовая характеристика скорости вращения колес, отличается в зависимости от высоты h расположения колес.
Как обозначено посредством R1 на фиг. 9, взаимосвязь между высотой hFR расположения переднего правого колеса и фазовой компонентой скорости вращения переднего правого колеса/импульса неровности дорожного покрытия для правых переднего и заднего колес 11RFR на конкретной для фазовой компоненты частоте fPR, т.е. фактическая фазовая компонента скорости вращения переднего правого колеса является константой, независимо от изменений высоты hFR расположения переднего правого колеса. Иными словами, результат характеристической функции (PF=PF(h)) фазовой компоненты передних колес, представляющий собой взаимосвязь между высотой h расположения колес и фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия для передних колес на конкретной для фазовой компоненты частоте fPR, является константой (PF=const). С другой стороны, взаимосвязь между высотой hRR расположения заднего правого колеса и фазовой компонентой скорости вращения заднего правого колеса/импульса неровности дорожного покрытия для правых переднего и заднего колес 11RFR на конкретной для фазовой компоненты частоте fPR, т.е. фактическая фазовая компонента скорости вращения заднего правого колеса, является такой, что фазовая компонента скорости вращения заднего правого колеса/импульса неровности дорожного покрытия увеличивается с увеличением высоты hRR расположения заднего правого колеса, как обозначено посредством S1 на чертеже. Иными словами, результат характеристической функции (PR=PR(h)) фазовой компоненты задних колес, представляющий собой взаимосвязь между высотой h расположения колес и фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия на конкретной для фазовой компоненты частоте fPR, является таким, что фазовая компонента скорости вращения колес/импульса неровности дорожного покрытия увеличивается и уменьшается согласно увеличению и уменьшению высоты h расположения колес. В варианте осуществления, соответствующая взаимосвязь между высотой h расположения колес и значением, которое основано на скоростях VFL-VRR вращения колес и импульсе неровности дорожного покрытия, является взаимосвязью между высотой h расположения колес и фактической фазовой компонентой скорости вращения колес на конкретной для фазовой компоненты частоте fP.
Разность фазовых компонент задних колес относительно передних колес может рассчитываться на основе выражения (15), в качестве результата передаточной функции (ΔPM(h)) скорости вращения передних и задних колес, которая основана на характеристической функции (PF=PF(h)) фазовой компоненты передних колес и характеристической функции (PR=PR(h)) фазовой компоненты задних колес, как обозначено посредством T на чертеже.
ΔPM(h)=PR(h)-PF (15)
Следовательно, значение, получающееся в результате вычитания входной разности ΔPU фазовых компонент из разности ΔPWR фазовых компонент скорости вращения правых переднего и заднего колес, и результат передаточной функции (ΔPM(h)) скорости вращения передних и задних колес являются идентичными, и, следовательно, выражение (14) может извлекаться из нижеприведенного выражения (16).
ΔPM(h)= ΔPWR-ΔPU (16)
Как пояснено выше, устройство 1-2 оценки высоты посадки транспортного средства согласно варианту осуществления может оценивать высоту hRR расположения заднего правого колеса, в качестве высоты посадки транспортного средства, на основе взаимосвязи между высотой h расположения колес и фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия для правых переднего и заднего колес 11RFR на конкретной для фазовой компоненты частоте fPR, т.е. фактической фазовой компоненты скорости вращения колес, с использованием, в качестве входных параметров, скорости VFR вращения переднего правого колеса и скорости VRR вращения заднего правого колеса из пары правых переднего и заднего колес 11RFR. Соответственно, высота посадки транспортного средства между задними колесами транспортного средства 10 может быть оценена недорогим способом, как и в случае варианта 1 осуществления, без необходимости датчика высоты посадки транспортного средства, который определяет высоту посадки транспортного средства между колесами 11FL-11RR.
Дополнительно, высота hRL расположения заднего левого колеса может быть оценена, в качестве высоты посадки транспортного средства, на основе взаимосвязи между высотой h расположения колес и фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия для пары передних левого и заднего колес 11FL, 11RL (далее называемых просто "передними левыми и задними колесами 11LFR") на конкретной для фазовой компоненты частоте fPL, т.е. фактической фазовой компоненты скорости вращения колес, с использованием, в качестве входных параметров, скорости VFL вращения переднего левого колеса и скорости VRL вращения заднего левого колеса для передних левого и заднего колес 11LFR. Следовательно, разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами может быть оценена на основе высоты hRR расположения заднего правого колеса и высоты hRL расположения заднего левого колеса (ΔHRLR=hRL-hRR). Если разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами может быть оценена, и устройства подвески задних левого и правого колес имеют идентичную конфигурацию, то разность ΔWRLR весов задних левого и правого колес может быть вычислена и оценена посредством умножения жесткости KR упругого элемента подвески, приведенной к колесу, устройств 13RL, 13RR подвески задних левого и правого колес 11RLR на разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами. В силу этого обеспечивается высокоточное управление в соответствии с состоянием движения транспортного средства 10, как и в случае варианта 1 осуществления.
Например, относительная высота расположения колес для переднего правого колеса 11FR относительно переднего левого колеса 11FL транспортного средства 10 и высота расположения колес для задних левого и правого колес RLR может быть оценена, в качестве высоты посадки транспортного средства, через комбинацию с разностью ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами, которая оценивается как высота посадки транспортного средства в варианте 1 осуществления. Следовательно, это обеспечивает управление, с еще более высокой точностью, в соответствии с состоянием движения транспортного средства 10.
В варианте осуществления, модуль 41 оценки высоты посадки транспортного средства оценивает высоту посадки транспортного средства между задними колесами на основе скорости VFR вращения переднего правого колеса и скорости VRR вращения заднего правого колеса из пары правых переднего и заднего колес 11RFR, но изобретение не ограничено этим, и высота посадки транспортного средства между задними колесами может быть оценена на основе среднего значения скорости VFR вращения переднего правого колеса и скорости VFL вращения переднего левого колеса и среднего значения скорости VRR вращения заднего правого колеса и скорости VRL вращения заднего левого колеса.
Вариант 3 осуществления изобретения
Ниже поясняется устройство оценки высоты посадки транспортного средства согласно варианту 3 осуществления. Фиг. 10 является схемой, иллюстрирующей пример конфигурации устройства оценки высоты посадки транспортного средства согласно вариантам 3 и 4 осуществления. Те части в базовой конфигурации устройства 1-3 оценки высоты посадки транспортного средства согласно варианту 3 осуществления, которые являются идентичными частям в базовой конфигурации устройства 1-1 оценки высоты посадки транспортного средства согласно варианту 1 осуществления, не поясняются повторно в данном документе. Как проиллюстрировано на фиг. 10, устройство 1-3 оценки высоты посадки транспортного средства согласно варианту 3 осуществления содержит устройства 15FL-15RR модификации состояния подвески. Устройства 15FL-15RR модификации состояния подвески являются устройствами, которые модифицируют состояние подвески соответствующих колес 11FL-11RR относительно кузова 14 и предоставляются в соответствующих устройствах 13FL-13RR подвески. Устройства 15FL-15RR модификации состояния подвески в варианте осуществления модифицируют демпфирующие силы соответствующих устройств 13FL-13RR подвески. Устройства 15FL-15RR модификации состояния подвески модифицируют демпфирующие силы на основе значений X управления подвеской, которые выводятся, в качестве значения команды управления, посредством ECU 4. Иными словами, транспортное средство 10, оснащенное устройством 1-3 оценки высоты посадки транспортного средства согласно варианту 3 осуществления, имеет установленную адаптивную систему регулирования подвески (AVS-систему). В данном документе демпфирующая сила задается с возможностью модификации до большой, средней и небольшой.
В варианте осуществления, модуль 41 оценки высоты посадки транспортного средства оценивает, в качестве высоты посадки транспортного средства, разность ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами или разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами, на основе скорости VFL вращения переднего левого колеса и скорости VFR вращения переднего правого колеса для передних левого и правого колес 11FLR или скорости VRL вращения заднего левого колеса и скорости VRR вращения заднего правого колеса для задних левого и правого колес 11RLR и на основе соответствующей взаимосвязи между высотой h расположения колес и значением, которое основано на скорости вращения колес и на импульсе неровности дорожного покрытия и которое отличается в зависимости от состояния подвески (демпфирующей силы).
Ниже поясняется способ оценки высоты посадки транспортного средства посредством устройства 1-3 оценки высоты посадки транспортного средства согласно варианту 3 осуществления. Базовые этапы способа оценки высоты посадки транспортного средства посредством устройства 1-3 оценки высоты посадки транспортного средства согласно варианту 3 осуществления являются практически идентичными этапам способа оценки высоты посадки транспортного средства посредством устройства 1-1 оценки высоты посадки транспортного средства согласно варианту 1 осуществления, и, следовательно, их пояснение опускается или упрощается. Фиг. 11 является блок-схемой последовательности операций способа, иллюстрирующей способ оценки высоты посадки транспортного средства посредством устройства оценки высоты посадки транспортного средства согласно варианту 3 осуществления. Фиг. 12 является схемой, иллюстрирующей взаимосвязь (небольшое демпфирование) между амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в переднем колесе. Фиг. 13 является схемой, иллюстрирующей взаимосвязь (большое демпфирование) между амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в переднем колесе. Фиг. 14 является схемой, иллюстрирующей взаимосвязь (небольшое демпфирование) между амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в заднем колесе. Фиг. 15 является схемой, иллюстрирующей взаимосвязь (большое демпфирование) между амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в заднем колесе. Фиг. 16 является схемой, иллюстрирующей взаимосвязь между высотой расположения колес и амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия на конкретной для амплитудной компоненты частоте. Фиг. 12 и фиг. 13 являются практически идентичными фиг. 3, но фиг. 3 иллюстрирует случай среднего демпфирования (демпфирующая сила на опорном уровне), тогда как фиг. 12 иллюстрирует случай небольшого демпфирования (демпфирующая сила на минимальном уровне), и фиг. 13 иллюстрирует случай большого демпфирования (демпфирующая сила на максимальном уровне). Аналогично, фиг. 14 и фиг. 15 являются практически идентичными фиг. 4, но фиг. 4 иллюстрирует случай среднего демпфирования (демпфирующая сила на опорном уровне), тогда как фиг. 14 иллюстрирует случай небольшого демпфирования (демпфирующая сила на минимальном уровне), и фиг. 15 иллюстрирует случай большого демпфирования (демпфирующая сила на максимальном уровне). Фиг. 16 является практически идентичным фиг. 5, но иллюстрирует в данном документе взаимосвязь, в соответствии с состоянием подвески, высоты hFR расположения переднего правого колеса и амплитудной компоненты log (GFR/ZFR) скорости вращения колес/импульса неровности дорожного покрытия для переднего правого колеса 11FR на характеристической для амплитудной компоненты частоте fGF передних левого и правого колес FLR.
Во-первых, модуль 41 оценки высоты посадки транспортного средства ECU 4 получает скорость VFL вращения переднего левого колеса, скорость VFR вращения переднего правого колеса, значение XFL управления подвеской переднего левого колеса и значение XFR управления подвеской переднего правого колеса (этап ST31). В данном документе, модуль 41 оценки высоты посадки транспортного средства получает не только скорость VFL вращения переднего левого колеса и скорость VFR вращения переднего правого колеса для передних левого и правого колес 11FLR, но также и значение XFL управления подвеской переднего левого колеса, которое выводится в устройство 15FL модификации состояния подвески переднего левого колеса, чтобы управлять состоянием подвески переднего левого колеса 11FL, т.е. демпфирующей силой устройства 13FL подвески переднего левого колеса, и значение XFR управления подвеской переднего правого колеса, которое выводится в устройство 15FR модификации состояния подвески переднего правого колеса, чтобы управлять состоянием подвески переднего правого колеса 11FR, т.е. демпфирующей силой устройства 13FR подвески переднего правого колеса. Чтобы оценивать разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами, модуль 41 оценки высоты посадки транспортного средства получает не только скорость VRL вращения заднего левого колеса и скорость VRR вращения заднего правого колеса для задних левого и правого колес 11RLR, но также и значение XRL управления подвеской заднего левого колеса, которое выводится в устройство 15RL модификации состояния подвески заднего левого колеса, чтобы управлять состоянием подвески заднего левого колеса 11RL, т.е. демпфирующей силой устройства 13RL подвески заднего левого колеса, и значение XRR управления подвеской заднего правого колеса, которое выводится в устройство 15RR модификации состояния подвески заднего правого колеса, чтобы управлять состоянием подвески заднего правого колеса 11RR, т.е. демпфирующей силой устройства 13RR подвески заднего правого колеса.
Затем, модуль 41 оценки высоты посадки транспортного средства вычисляет характеристику (log GFL) скорости вращения переднего левого колеса и характеристику (log GFR) скорости вращения переднего правого колеса для передних левого и правого колес 11FLR на конкретной для амплитудной компоненты частоте fGF на основе полученной скорости VFL вращения переднего левого колеса и скорости VFR вращения переднего правого колеса (этап ST32). Чтобы оценивать разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами, модуль 41 оценки высоты посадки транспортного средства вычисляет характеристику (log GRL) скорости вращения заднего левого колеса и характеристику (log GRR) скорости вращения заднего правого колеса для задних левого и правого колес 11RLR на конкретной для амплитудной компоненты частоте fGR.
Затем, модуль 41 оценки высоты посадки транспортного средства вычисляет разность ΔGF амплитудных компонент скорости вращения передних левого и правого колес на основе вычисленной характеристики (log GFL) скорости вращения переднего левого колеса и характеристики (log GFR) скорости вращения переднего правого колеса (этап ST33). Чтобы оценивать разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами, модуль 41 оценки высоты посадки транспортного средства вычисляет разность ΔGR амплитудных компонент скорости вращения задних левого и правого колес на основе характеристики (log GRL) скорости вращения заднего левого колеса и характеристики (log GRR) скорости вращения заднего правого колеса.
Затем, модуль 41 оценки высоты посадки транспортного средства вычисляет разность ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами на основе вычисленной разности ΔGF амплитудных компонент скорости вращения передних левого и правого колес (этап ST34). Модуль 41 оценки высоты посадки транспортного средства вычисляет в данном документе разность ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами на основе разности ΔGF амплитудных компонент скорости вращения передних левого и правого колес и нижеприведенного выражения (17). В выражении, bFL является константой согласно демпфирующей силе, соответствующей переднему левому колесу 11FL на конкретной для амплитудной компоненты частоте fGF, и bFR является константой согласно демпфирующей силе, соответствующей переднему правому колесу 11FR на конкретной для амплитудной компоненты частоте fGF. Чтобы оценивать разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами, модуль 41 оценки высоты посадки транспортного средства вычисляет разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами на основе разности ΔGR амплитудных компонент скорости вращения задних левого и правого колес и нижеприведенного выражения (18). В выражении, bRL является константой согласно демпфирующей силе, соответствующей переднему левому колесу 11FL на конкретной для амплитудной компоненты частоте fGF, и bRR является константой согласно демпфирующей силе, соответствующей переднему правому колесу 11FR на конкретной для амплитудной компоненты частоте fGF.
ΔHFLR=(ΔGF-(bFL-bFR))/aF (17)
ΔHRLR=(ΔGR-(bRL-bRR))/aR (18)
Ниже поясняются причины, по которым выражения (17) и (18) обеспечивают возможность вычисления разности ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами и разности ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами согласно состоянию подвески. Пояснение частей, идентичных частям варианта 1 осуществления, опускается или упрощается в данном документе. На скорость вращения колес оказывается влияние, и, следовательно, на амплитудную компоненту (log (GFR/ZFR)) скорости вращения колес/импульса неровности дорожного покрытия, т.е. на фактическую амплитудную компоненту скорости вращения колес, также оказывают влияние изменения состояния подвески колес 11FL-11RR, т.е. изменения демпфирующей силы устройств 13FL-13RR подвески посредством соответствующих устройств 15FL-15RR модификации состояния подвески. В случае, если демпфирующая сила устройства 13FR подвески переднего правого колеса имеет минимальный уровень, позиция характеристических линий амплитудной компоненты (A2, B2, C2 на фиг. 12) на конкретной для амплитудной компоненты частоте fGF, как проиллюстрировано на фиг. 12, ниже позиции в случае, если демпфирующая сила имеет опорный уровень. В случае, если демпфирующая сила устройства подвески переднего правого колеса 13FR имеет максимальный уровень, позиция характеристических линий амплитудной компоненты (A3, B3, C3 на фиг. 13) на конкретной для амплитудной компоненты частоте fGF, как проиллюстрировано на фиг. 13, выше позиции, когда демпфирующая сила имеет опорный уровень. Как проиллюстрировано на фиг. 14, в отличие от этого, позиция характеристических линий амплитудной компоненты (D2, E2, F2 на фиг. 14) на конкретной для амплитудной компоненты частоте fGR выше позиции, когда демпфирующая сила имеет опорный уровень, в случае, если демпфирующая сила устройства 13RR подвески заднего правого колеса имеет минимальный уровень. Как проиллюстрировано на фиг. 15, позиция характеристических линий амплитудной компоненты (D3, E3, F3 на фиг. 14), на конкретной для амплитудной компоненты частоте fGR ниже позиции, когда демпфирующая сила имеет опорный уровень, в случае, если демпфирующая сила устройства 13RR подвески заднего правого колеса имеет максимальный уровень. Иными словами, амплитудная компонента (log G/Z) скорости вращения колес/импульса неровности дорожного покрытия для колес 11FL-11RR варьируется не только в зависимости от изменений высоты h расположения колес, но также и в зависимости от изменений состояния подвески, т.е. изменений демпфирующей силы. Иными словами, передаточная взаимосвязь между импульсом неровности дорожного покрытия и скоростью вращения колес для колес 11FL-11RR, т.е. характеристика амплитудной компоненты скорости вращения колес, отличается в зависимости от состояния подвески.
Во взаимосвязи между высотой hFR расположения переднего правого колеса и амплитудной компонентой (log (GFR/ZFR)) скорости вращения переднего правого колеса/импульса неровности дорожного покрытия для передних левого и правого колес 11FLR на конкретной для амплитудной компоненты частоте fGF, т.е. фактической характеристикой скорости вращения переднего правого колеса, амплитудная компонента (log (GFR/ZFR)) скорости вращения переднего правого колеса/импульса неровности дорожного покрытия снижается аналогично по мере того, как увеличивается высота hFR расположения переднего правого колеса, как обозначено посредством I1, I2, I3 на фиг. 16; в данном документе амплитудная компонента (log (G/Z)) скорости вращения колес/импульса неровности дорожного покрытия для идентичной высоты расположения колес снижается в порядке I3, I1, I2. Иными словами, взаимосвязь между высотой h расположения колес и амплитудной компонентой (log (G/Z)) скорости вращения колес/импульса неровности дорожного покрытия на конкретной для амплитудной компоненты частоте fG является такой, что по мере того, как увеличивается и уменьшается высота h расположения колес, амплитудная компонента (log (G/Z)) скорости вращения колес/импульса неровности дорожного покрытия увеличивается и уменьшается аналогично, и амплитудная компонента (log (G/Z)) скорости вращения колес/импульса неровности дорожного покрытия отличается для идентичной высоты расположения колес, в зависимости от состояния подвески. Следовательно, характеристическая функция амплитудной компоненты отличается в зависимости от состояния подвески, и, следовательно, константа b отличается в зависимости от демпфирующей силы. Например, при условии, что демпфирующая сила на опорном уровне составляет a*h+b1, то случай, в котором демпфирующая сила имеет минимальный уровень, представляет собой a*h+b2, а случай, в котором демпфирующая сила имеет максимальный уровень, представляет собой a*h+b3. В данном документе, справедливо b1≠b2≠b3 (b2<b1<b3 для передних левого и правого колес 11FLR).
Следовательно, если демпфирующие силы, соответствующие колесам 11FL-11RR, являются различными, константы bF, bR в вышеприведенных выражениях (4), (5), (6) и (7) больше не являются соответствующими идентичными значениями для передних левого и правого колес 11FLR и задних левого и правого колес 11RLR и могут быть заданы вместо этого посредством нижеприведенных выражений (19), (20), (21) и (22). В выражениях, bFL является константой, соответствующей переднему левому колесу 11FL на конкретной для амплитудной компоненты частоте fGF, bFR является константой, соответствующей переднему правому колесу 11FR на конкретной для амплитудной компоненты частоте fGF, bRL является константой, соответствующей заднему левому колесу 11RL на конкретной для амплитудной компоненты частоте fGF, bRR является константой, соответствующей заднему правому колесу 11RR на конкретной для амплитудной компоненты частоте fGF, константы bFL, bFR являются любым из b1, b2, b3 передних левого и правого колес 11FLR, и константы bRL, bRR являются любым из b1, b2, b3 задних левого и правого колес 11RLR.
log (GFL/ZF)=aF*hFL+bFL (19)
log (GFR/ZF)=aF*hFR+bFR (20)
log (GRL/ZR)=aR*hRL+bRL (21)
log (GRR/ZR)=aR*hRR+bRR (22)
После расчета разности ΔGF амплитудных компонент скорости вращения передних левого и правого колес на основе вышеприведенных выражений (19) и (20) в передних левом и правом колесах 11FLR, влияние импульса неровности дорожного покрытия, который вводится в передние левое и правое колеса 11FLR, может исключаться, как задано в нижеприведенном выражении (23). После расчета разности ΔGR амплитудных компонент скорости вращения задних левого и правого колес в задних левом и правом колесах 11RLR на основе выражения (21) и (22), влияние импульса неровности дорожного покрытия, который вводится в задние левое и правое колеса 11RLR, аналогично может удаляться, как задано в выражении (24). Выражение (17) для вычисления разности ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами может извлекаться из выражений (10) и (23), и выражение (18) для вычисления разности ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами может извлекаться из выражений (11) и (24).
Как описано выше, устройство 1-3 оценки высоты посадки транспортного средства согласно варианту осуществления может оценивать, в качестве высоты посадки транспортного средства, разность ΔHFLR высоты посадки транспортного средства между передними левым и правым колесами, которая учитывает изменения состояния подвески передних левого и правого колес при управлении демпфирующей силой посредством устройства модификации состояния подвески передних левого и правого колес, на основе взаимосвязи, которая отличается в зависимости от состояния подвески, между высотой h расположения колес и амплитудными компонентами (log (G/Z)) скорости вращения колес/импульса неровности дорожного покрытия для передних левого и правого колес 11FLR на конкретной для амплитудной компоненты частоте fGF, т.е. фактической амплитудной компонентой скорости вращения колес, с использованием, в качестве входных параметров, скорости VFL вращения переднего левого колеса, скорости VFR вращения переднего правого колеса, значения XFL управления подвеской переднего левого колеса и значения XFR управления подвеской переднего правого колеса из пары передних левого и правого колес 11FLR. Дополнительно, устройство 1-3 оценки высоты посадки транспортного средства может оценивать, в качестве высоты посадки транспортного средства, разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами, которая учитывает изменения состояния подвески задних левого и правого колес при управлении демпфирующей силой посредством устройства модификации состояния подвески задних левого и правого колес, на основе взаимосвязи, которая отличается в зависимости от состояния подвески, между высотой h расположения колес и амплитудными компонентами (log (G/Z)) скорости вращения колес/импульса неровности дорожного покрытия задних левого и правого колес 11RLR на конкретной для амплитудной компоненты частоте fGR, т.е. фактической амплитудной компонентой скорости вращения колес, с использованием, в качестве входных параметров, скорости VRL вращения заднего левого колеса, скорости VRR вращения заднего правого колеса, значения XRL управления подвеской заднего левого колеса и значения XRR управления подвеской заднего правого колеса из пары задних левого и правого колес 11RLR. Соответственно, нет необходимости в предоставлении датчика высоты посадки транспортного средства для определения высоты посадки транспортного средства колес 11FL-11RR, и новые датчики не добавляются для того, чтобы оценивать высоту посадки транспортного средства, даже если состояния подвески колес 11FL-11RR являются различными, в случае транспортного средства 10, уже оснащенного датчиками 2FL-2RR скорости вращения колес и устройствами 15FL-15RR модификации состояния подвески в целях управления торможением, как представлено посредством ABS, или управления поведением, как представлено посредством управления демпфированием посредством AVS. Следовательно, появляется возможность недорогим способом оценивать разность высоты посадки транспортного средства между левыми и правыми колесами в транспортном средстве 10. Дополнительно, разность ΔWFLR весов передних левого и правого колес и разность ΔWRLR весов задних левого и правого колес согласно состоянию подвески могут быть вычислены и оценены, и высокоточное управление в соответствии с состоянием движения транспортного средства 10 аналогично может выполняться, как и в случае варианта 1 осуществления.
Вариант 4 осуществления изобретения
Ниже поясняется устройство оценки высоты посадки транспортного средства согласно варианту 4 осуществления. Базовая конфигурация устройства 1-4 оценки высоты посадки транспортного средства согласно варианту 4 осуществления является идентичной базовой конфигурации устройства 1-3 оценки высоты посадки транспортного средства согласно варианту 3 осуществления, и, следовательно, его конфигурация не поясняется повторно. Модуль 41 оценки высоты посадки транспортного средства в ECU 4 устройства 1-4 оценки высоты посадки транспортного средства согласно варианту 4 осуществления оценивает, в качестве высоты посадки транспортного средства, высоту hRR расположения заднего правого колеса для заднего колеса в паре передних и задних колес, на основе скорости VFR вращения переднего правого колеса и скорости VRR вращения заднего правого колеса для правых переднего и заднего колес 11RFR и на основе соответствующей взаимосвязи между высотой h расположения колес и значением, которое основано на скорости вращения колес и на импульсе неровности дорожного покрытия и которое отличается в зависимости от состояния подвески (демпфирующей силы).
Ниже поясняется способ оценки высоты посадки транспортного средства посредством устройства 1-4 оценки высоты посадки транспортного средства согласно варианту 4 осуществления. Базовые этапы способа оценки высоты посадки транспортного средства посредством устройства 1-4 оценки высоты посадки транспортного средства согласно варианту 4 осуществления являются практически идентичными этапам способа оценки высоты посадки транспортного средства посредством устройства 1-2 оценки высоты посадки транспортного средства согласно варианту 2 осуществления, и, следовательно, их пояснение опускается или упрощается. Фиг. 17 является блок-схемой последовательности операций способа, иллюстрирующей способ оценки высоты посадки транспортного средства посредством устройства оценки высоты посадки транспортного средства согласно варианту 4 осуществления. Фиг. 18 является схемой, иллюстрирующей взаимосвязь (небольшое демпфирование) между фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в переднем колесе. Фиг. 19 является схемой, иллюстрирующей взаимосвязь (большое демпфирование) между фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в переднем колесе. Фиг. 20 является схемой, иллюстрирующей взаимосвязь (небольшое демпфирование) между фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в заднем колесе. Фиг. 21 является схемой, иллюстрирующей взаимосвязь (большое демпфирование) между фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия, частотой и высотой расположения колеса в заднем колесе. Фиг. 22 является схемой, иллюстрирующей взаимосвязь между высотой расположения колес и фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия на конкретной для фазовой компоненты частоте. Фиг. 18 и фиг. 19 являются практически идентичными фиг. 7, но фиг. 7 иллюстрирует случай среднего демпфирования (демпфирующая сила на опорном уровне), тогда как фиг. 18 иллюстрирует случай небольшого демпфирования (демпфирующая сила на минимальном уровне), и фиг. 19 иллюстрирует случай большого демпфирования (демпфирующая сила на максимальном уровне). Аналогично, фиг. 20 и фиг. 21 являются практически идентичными фиг. 8, но фиг. 8 иллюстрирует случай среднего демпфирования (демпфирующая сила на опорном уровне), тогда как фиг. 20 иллюстрирует случай небольшого демпфирования (демпфирующая сила на минимальном уровне), и фиг. 21 иллюстрирует случай большого демпфирования (демпфирующая сила на максимальном уровне). Фиг. 22 является практически идентичным фиг. 9, но иллюстрирует в данном документе взаимосвязь, в соответствии с состоянием подвески, высоты hFR расположения переднего правого колеса и амплитудной компоненты log (GFR/ZFR) скорости вращения колес/импульса неровности дорожного покрытия для переднего правого колеса 11FR на характеристической для амплитудной компоненты частоте fGF, передних левого и правого колес FLR.
Во-первых, модуль 41 оценки высоты посадки транспортного средства ECU 4 получает скорость VFR вращения переднего правого колеса, скорость VRR вращения заднего правого колеса, значение XFR управления подвеской переднего правого колеса и значение XRR управления подвеской заднего правого колеса (этап ST41). В данном документе модуль 41 оценки высоты посадки транспортного средства получает не только скорость VFR вращения переднего правого колеса и скорость VRR вращения заднего правого колеса для правых переднего и заднего колес 11RFR, но также и значение XFR управления подвеской переднего правого колеса, которое выводится в устройство 15FR модификации состояния подвески переднего правого колеса, чтобы управлять состоянием подвески переднего правого колеса 11FR, т.е. демпфирующей силой устройства 13FR подвески переднего правого колеса, и значение XRR управления подвеской заднего правого колеса, которое выводится в устройство 15RR модификации состояния подвески заднего правого колеса, чтобы управлять состоянием подвески заднего правого колеса 11RR, т.е. демпфирующей силой устройства 13RR подвески заднего правого колеса.
Затем, модуль 41 оценки высоты посадки транспортного средства вычисляет разность ΔPWR фазовых компонент скорости вращения правых переднего и заднего колес для правых переднего и заднего колес 11RFR на конкретной для фазовой компоненты частоте fPR на основе полученной скорости VFR вращения переднего правого колеса и скорости VRR вращения заднего правого колеса (этап ST42). Затем, модуль 41 оценки высоты посадки транспортного средства вычисляет входную разность ΔPU фазовых компонент (этап ST43).
Затем, модуль 41 оценки высоты посадки транспортного средства вычисляет высоту hRR расположения заднего правого колеса на основе вычисленной разности ΔPWR фазовых компонент скорости вращения правых переднего и заднего колес и входной разности ΔPU фазовых компонент (этап ST44). Модуль 41 оценки высоты посадки транспортного средства вычисляет высоту hRR расположения заднего правого колеса на основе разности ΔPWR фазовых компонент скорости вращения правых переднего и заднего колес, входной разности ΔPU фазовых компонент и нижеприведенного выражения (25). В данном документе, PRR(h) является характеристической функцией фазовой компоненты задних колес для заднего правого колеса 11RR согласно демпфирующей силе, и PFR является результатом характеристической функции (PFR=PFR(h)) фазовой компоненты передних колес для переднего правого колеса 11FR согласно демпфирующей силе.
hRR=PRR -1(ΔPWR-ΔPU+PFR) (25)
Ниже поясняется причина, по которой высота hRR расположения заднего правого колеса может быть вычислена на основе выражения (25). Пояснение частей, идентичных частям варианта 2 осуществления, опускается или упрощается в данном документе. На скорость вращения колес оказывается влияние, и на фазовую компоненту скорости вращения колес/импульса неровности дорожного покрытия, т.е. на фактическую фазовую компоненту скорости вращения колес, также оказывают влияние изменения состояния подвески колес 11FL-11RR, т.е. изменения демпфирующей силы устройств 13FL-13RR подвески посредством соответствующих устройств 15FL-15RR модификации состояния подвески. Как проиллюстрировано на фиг. 18, в случае, если демпфирующая сила устройства подвески переднего правого колеса 13FR имеет минимальный уровень, позиция характеристических линий фазовой компоненты (K2, L2, M2 на чертеже) на конкретной для фазовой компоненты частоте fPR ниже позиции, когда демпфирующая сила имеет опорный уровень. Как проиллюстрировано на фиг. 19, в случае, если демпфирующая сила устройства подвески переднего правого колеса 13FR имеет максимальный уровень, позиция характеристических линий фазовой компоненты (K3, L3, M3 на чертеже) на конкретной для фазовой компоненты частоте fPR выше позиции, когда демпфирующая сила имеет опорный уровень. С другой стороны, как проиллюстрировано на фиг. 20, в случае, если демпфирующая сила устройства 13RR подвески заднего правого колеса имеет минимальный уровень, позиция характеристических линий фазовой компоненты (N2, O2, Q2 на чертеже) на конкретной для фазовой компоненты частоте fPR выше позиции, когда демпфирующая сила имеет опорный уровень. Как проиллюстрировано на фиг. 21, в случае, если демпфирующая сила устройства 13RR подвески заднего правого колеса имеет максимальный уровень, позиция характеристических линий фазовой компоненты (N3, O3, Q3 на чертеже) на конкретной для фазовой компоненты частоте fPR ниже позиции, когда демпфирующая сила имеет опорный уровень. Иными словами, фазовая компонента скорости вращения колес/импульса неровности дорожного покрытия для колес 11FL-11RR варьируется не только в зависимости от изменений высоты h расположения колес, но также и в зависимости от изменений состояния подвески, т.е. изменений демпфирующей силы. Иными словами, передаточная взаимосвязь между импульсом неровности дорожного покрытия и скоростью вращения колес для колес 11FL-11RR, т.е. фазовая характеристика скорости вращения колес, отличается в зависимости от состояния подвески.
Как обозначено посредством R1, R2, R3 на фиг. 22, взаимосвязь между высотой hFR расположения переднего правого колеса и фазовой компонентой скорости вращения переднего правого колеса/импульса неровности дорожного покрытия для правых переднего и заднего колес 11RFR на конкретной для фазовой компоненты частоте fPR, т.е. фактическая фазовая компонента скорости вращения переднего правого колеса, является константой, независимо от изменений высоты hFR расположения переднего правого колеса и принимает меньшие значения в порядке R2, R1, R3. Иными словами, результат характеристической функции фазовой компоненты передних колес на конкретной для фазовой компоненты частоте fPR является константой, но принимает различное значение в зависимости от состояния подвески. При допущении демпфирующей силы на опорном уровне, чтобы давать в результате PF1=PF1(h), в таком случае демпфирующая сила на минимальном уровне дает в результате PF2=PF2(h), и демпфирующая сила на максимальном уровне дает в результате PF3=PF3(h). В данном документе, справедливо PF2>PF1>PF3.
С другой стороны, взаимосвязь между высотой hRR расположения заднего правого колеса и фазовой компонентой скорости вращения заднего правого колеса/импульса неровности дорожного покрытия для правых переднего и заднего колес 11RFR на конкретной для фазовой компоненты частоте fPR, т.е. фактическая фазовая компонента скорости вращения заднего правого колеса, является такой, что фазовая компонента скорости вращения заднего правого колеса/импульса неровности дорожного покрытия увеличивается по мере того, как увеличивается высота hRR расположения заднего правого колеса, как обозначено посредством S1, S2, S3 на чертеже. Фазовая компонента скорости вращения колес/импульса неровности дорожного покрытия для идентичной высоты расположения колес принимает меньшие значения в порядке S2, S1, S3. Иными словами, характеристическая функция фазовой компоненты задних колес на конкретной для фазовой компоненты частоте fPR отличается в зависимости от состояния подвески. При допущении демпфирующей силы на опорном уровне, чтобы давать в результате PR1=PF1(h), в таком случае демпфирующая сила на минимальном уровне дает в результате PF2=PF2(h), и демпфирующая сила на максимальном уровне дает в результате PF3=PF3(h). В данном документе, справедливо PR2>PR1>PR3.
Характеристическая функция (PFR=PFR(h)) фазовой компоненты передних колес и характеристическая функция (PRR=PRR(h)) фазовой компоненты задних колес правых переднего и заднего колес 11RFR отличаются в зависимости от состояния подвески. Соответственно, передаточная функция (ΔPM(h)) скорости вращения передних и задних колес варьируется в зависимости от состояния подвески. Например, передаточная функция скорости вращения передних и задних колес представляется посредством нижеприведенного выражения (26) в случае, если демпфирующая сила, соответствующая заднему правому колесу 11RR, имеет максимальный уровень, с демпфирующей силой переднего правого колеса 11FR на опорном уровне, как обозначено посредством T на фиг. 22.
ΔPM(h)=PRR(h)-PFR=PR3(h)-PF1 (26)
Следовательно, значение, которое получается в результате вычитания входной разности ΔPU фазовых компонент из разности ΔPWR фазовых компонент скорости вращения правых переднего и заднего колес, и результат передаточной функции (ΔPM(h)) скорости вращения передних и задних колес являются идентичными, и, следовательно, выражение (25) может извлекаться из нижеприведенного выражения (27).
PRR(h)-PFR=ΔPWR-ΔPU (27)
Как пояснено выше, устройство 1-4 оценки высоты посадки транспортного средства согласно варианту осуществления может оценивать, в качестве высоты посадки транспортного средства, высоту hRR расположения заднего правого колеса, которая учитывает изменения состояния подвески правых переднего и заднего колес, на основе взаимосвязи, которая отличается в зависимости от состояния подвески, между высотой h расположения колес и фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия для правых переднего и заднего колес 11RFR на конкретной для фазовой компоненты частоте fPR, т.е. фактической фазовой компоненты скорости вращения колес, с использованием, в качестве входных параметров, скорости VFR вращения переднего правого колеса, скорости VRR вращения заднего правого колеса, значения XFR управления подвеской переднего правого колеса и значения XRR управления подвеской заднего правого колеса из пары правых переднего и заднего колес 11RFR. Соответственно, нет необходимости в датчике высоты посадки транспортного средства, который определяет высоту посадки транспортного средства между колесами 11FL-11RR, и высота посадки транспортного средства между задними колесами транспортного средства 10 может быть оценена недорогим способом, как и в случае варианта 2 осуществления.
Устройство 1-4 оценки высоты посадки транспортного средства может оценивать, в качестве высоты посадки транспортного средства, высоту hRL расположения заднего левого колеса на основе взаимосвязи между высотой h расположения колес и фазовой компонентой скорости вращения колес/импульса неровности дорожного покрытия для передних левого и заднего колес 11LFR на конкретной для фазовой компоненты частоте fPL, т.е. фактической фазовой компоненты скорости вращения колес, с использованием, в качестве входных параметров, скорости VFL вращения переднего левого колеса, скорости VRL вращения заднего левого колеса, значения XFL управления подвеской переднего левого колеса и значения XRL управления подвеской заднего левого колеса для передних левого и заднего колес 11LFR. Следовательно, появляется возможность оценивать разность ΔHRLR высоты посадки транспортного средства между задними левым и правым колесами и вычислять и оценивать разность ΔWRLR весов задних левого и правого колес. В силу этого обеспечивается высокоточное управление в соответствии с состоянием движения транспортного средства 10, как и в случае варианта 2 осуществления.
В вариантах осуществления 3 и 4, модификации демпфирующей силы используются в качестве модификаций состояния подвески, но варианты осуществления не ограничены этим, и модификации высоты расположения колес посредством устройства регулирования высоты посадки транспортного средства или модификации жесткости стабилизатора посредством активной системы стабилизации могут приспосабливаться вместо этого.
Оценка высоты посадки транспортного средства выполняется, когда существует предварительно определенный импульс неровности дорожного покрытия.
В вариантах 1 и 4 осуществления, оценка высоты посадки транспортного средства посредством модуля 41 оценки высоты посадки транспортного средства может выполняться, если конкретный импульс неровности дорожного покрытия воздействует на колеса 11FL-11RR. На значение неподрессоренного вертикального ускорения оказывает влияние импульс неровности дорожного покрытия, и, следовательно, оценка высоты посадки транспортного средства посредством модуля 41 оценки высоты посадки транспортного средства может выполняться после определения того, что возникает конкретный ввод от поверхности, в качестве результата определения того, осуществлен или нет конкретный импульс неровности дорожного покрытия, на основе значения, определенного посредством датчика неподрессоренного вертикального ускорения (например, датчика, смонтированного на электромагнитной подвеске), который предоставляется в транспортном средстве 10 и который допускает определение вертикального ускорения, ближе к колесам 11FL-11RR, чем устройства 13FL-13RR подвески. В данном документе, термин "конкретный импульс неровности дорожного покрытия" означает импульс неровности дорожного покрытия в случае существенного изменения высоты h расположения колес. Как результат, поведение транспортного средства 10 может надежно управляться на основе оценки высоты посадки транспортного средства, и может уменьшаться вычислительная нагрузка ECU 8 системы поддержки, когда высота h расположения колес существенно варьируется, т.е. когда поведение транспортного средства 10 не является стабильным, посредством активного выполнения оценки высоты посадки транспортного средства при существенных изменениях высоты h расположения колес.
Перечень ссылочных позиций
1-1 - 1-4 - устройство оценки высоты посадки транспортного средства
2FL, 2FR, 2RL, 2RR - датчик скорости вращения колес
3 - датчик скорости транспортного средства
4 - ECU
41 - модуль оценки высоты посадки транспортного средства
5 - ECU двигателя
6 - ECU тормоза
7 - ECU рулевого управления
10 - транспортное средство
11FL - переднее левое колесо
11FR - переднее правое колесо
11RL - заднее левое колесо
11RR - заднее правое колесо
12FL, 12FR, 12RL, 12RR - ведущий вал
13FL, 13FR, 13RL, 13RR - устройство подвески
14 - кузов
15FL, 15FR, 15RL, 15RR - устройство модификации состояния подвески.


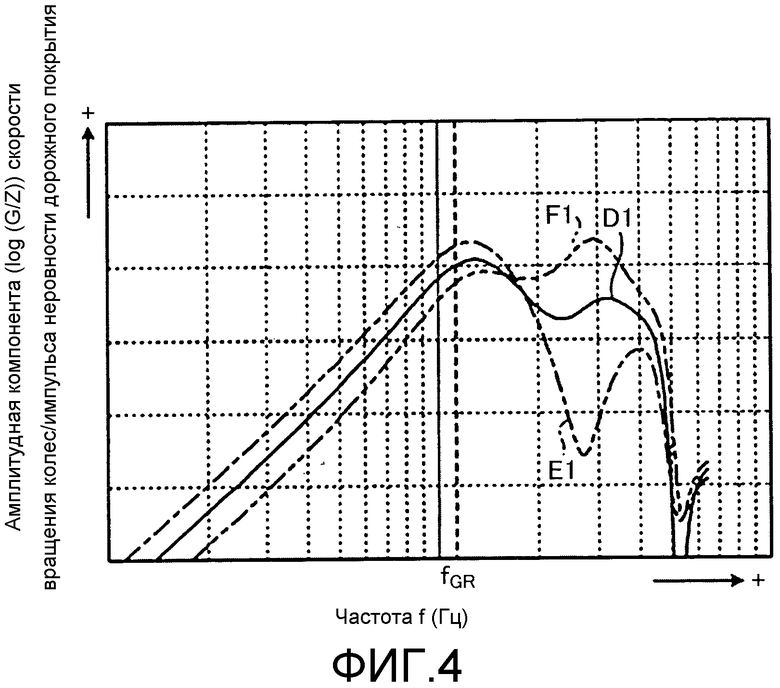
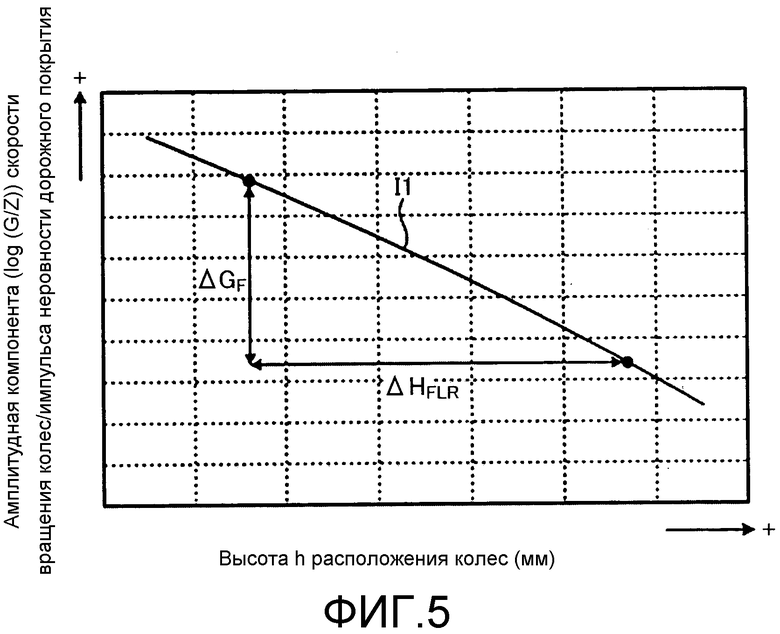




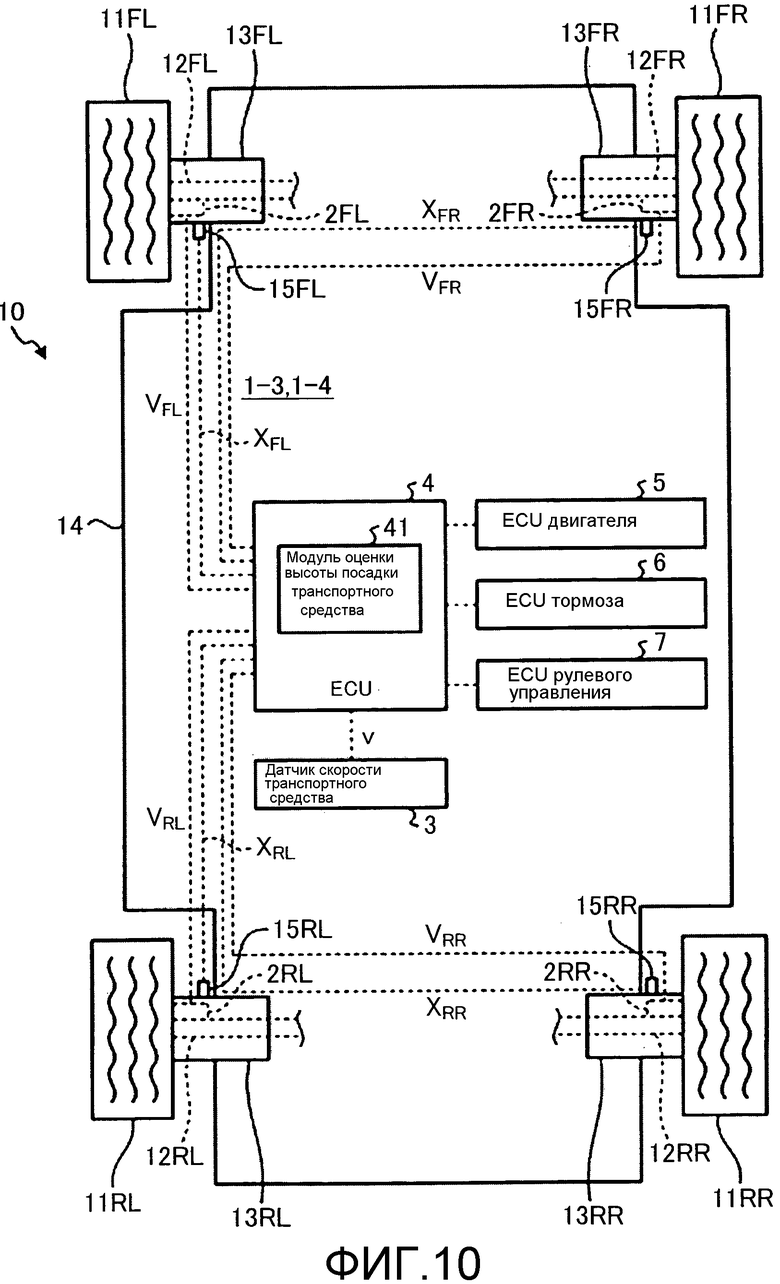

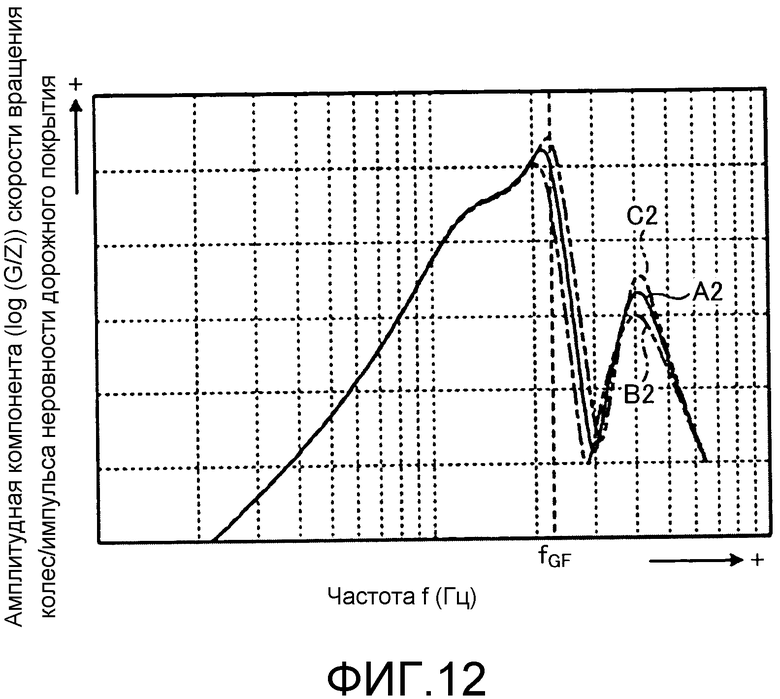

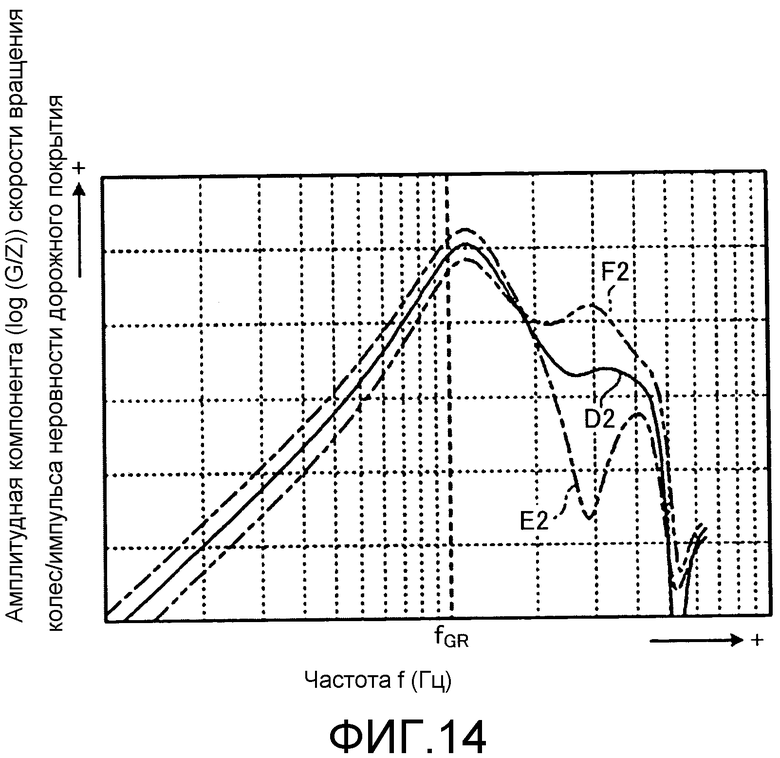
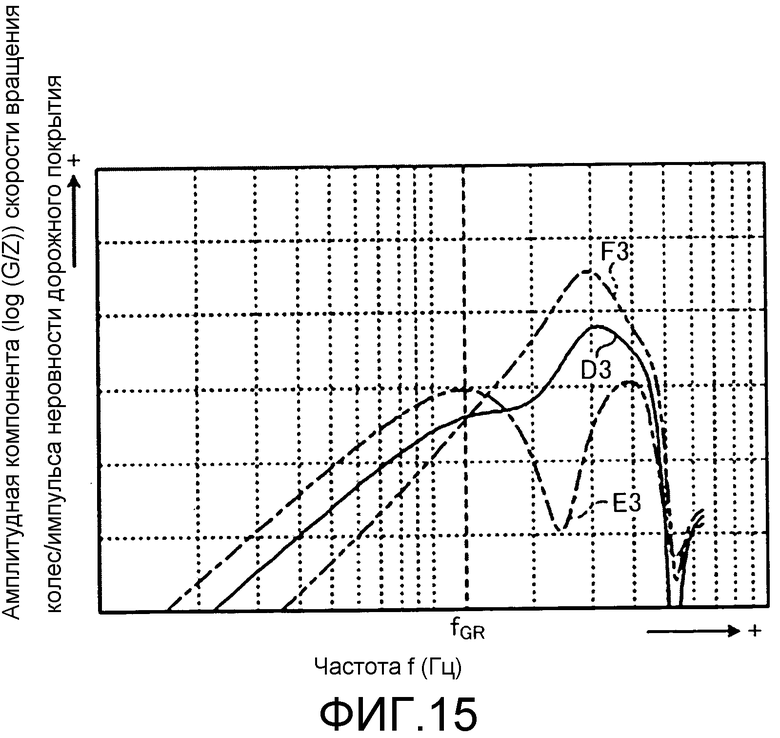
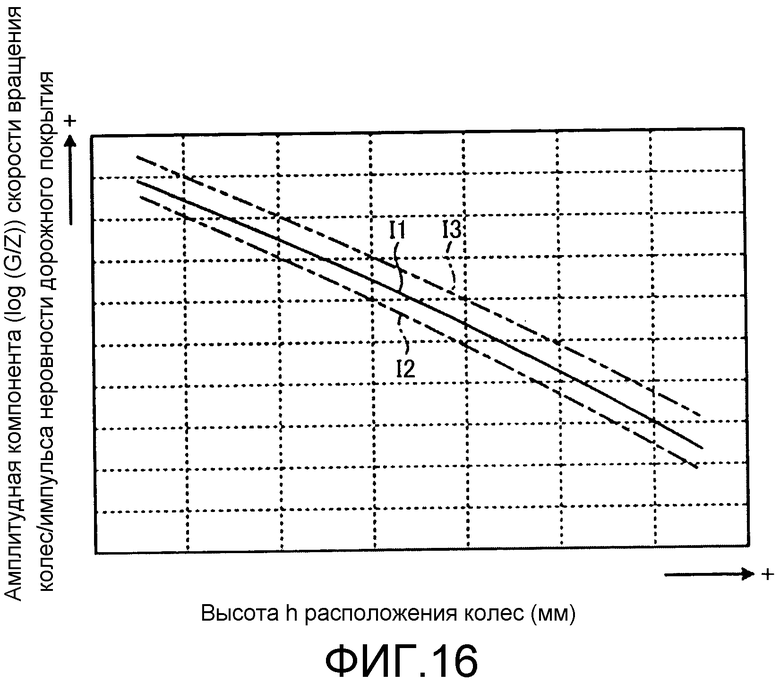

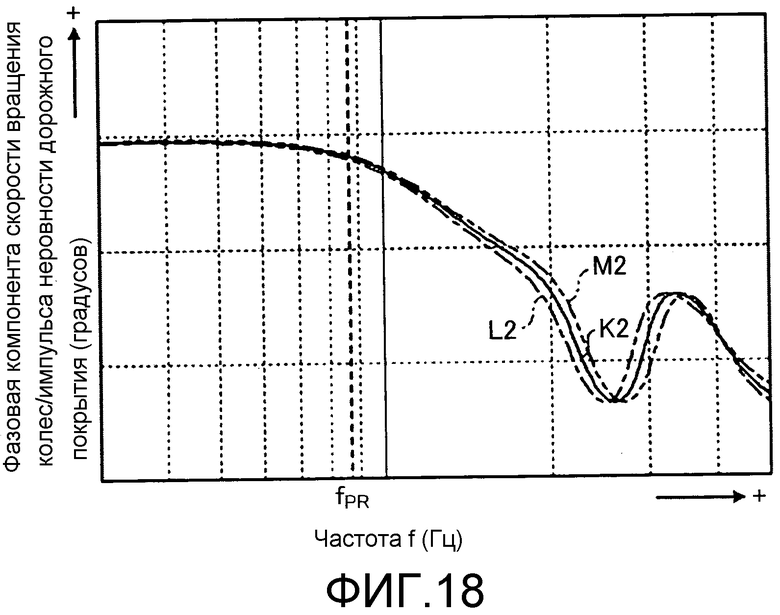
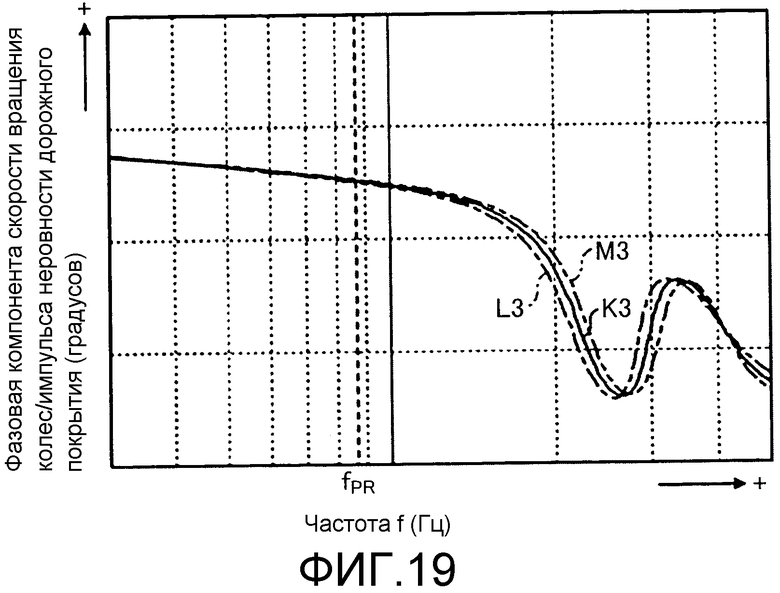



Высота посадки транспортного средства может быть оценена недорогим способом посредством: определения скорости вращения колес, которая представляет собой скорость вращения каждого колеса (этап ST11); выполнения частотного анализа определенной скорости вращения колес для пары левого и правого колес и вычисления соответствующих характеристик скорости вращения колес для левых и правых колес на конкретной для амплитудной компоненты частоте (этап ST12); вычисления разности амплитудных компонент скорости вращения левого и правого колес на основе вычисленных характеристик скорости вращения колес для левых и правых колес (этап ST13); и оценки высоты посадки транспортного средства на основе соответствующей взаимосвязи между высотой расположения колеса для колеса относительно кузова транспортного средства и значением (амплитудной компонентой скорости вращения колес/импульса неровности дорожного покрытия), которое основано на скорости вращения колес и импульсе неровности дорожного покрытия, который поступает с дорожного покрытия в колеса, и на основе разности амплитудных компонент скорости вращения левого и правого колес (этап ST14). Достигается создание недорогих устройства оценки высоты посадки транспортного средства и способа оценки высоты посадки транспортного средства, которые обеспечивают возможность оценки высоты посадки транспортного средства. 2 н. и 6 з.п. ф-лы, 22 ил.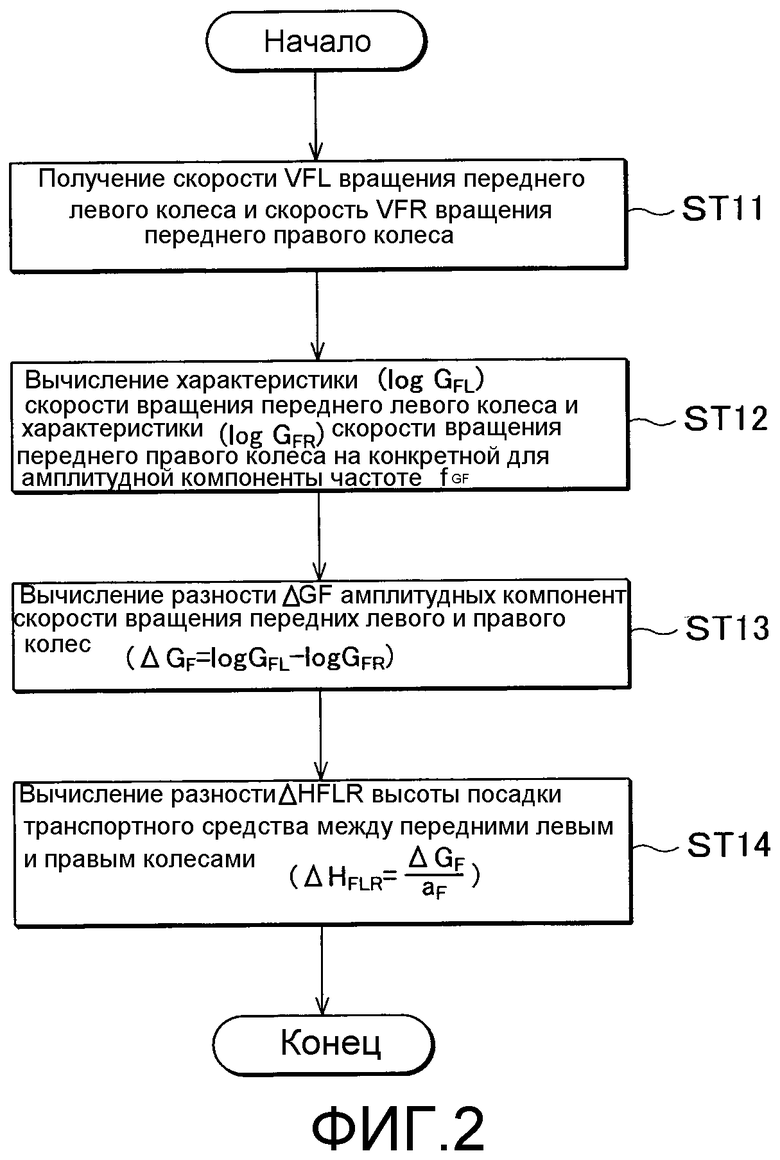
1. Устройство оценки высоты посадки транспортного средства, содержащее:
средство определения скорости вращения колес для определения скорости вращения колес, которая представляет собой скорость вращения каждого колеса; и
средство оценки высоты посадки транспортного средства для оценки высоты посадки транспортного средства на основе соответствующей взаимосвязи между высотой расположения колес для упомянутого колеса относительно кузова транспортного средства и значением, которое основано на упомянутой скорости вращения колес и импульсе неровности дорожного покрытия, который поступает с дорожного покрытия в упомянутое колесо, и на основе упомянутой определяемой скорости вращения колес для пары колес.
2. Устройство по п. 1, в котором средство оценки высоты посадки транспортного средства выполнено с возможностью:
выполнения частотного анализа определяемой скорости вращения колес для пары левого и правого колес и вычисления соответствующих характеристик скорости вращения колес для левого и правого колес на конкретной для амплитудной компоненты частоте; и
оценки, в качестве высоты посадки транспортного средства, относительной высоты одного из левого и правого колес относительно другого из левого и правого колес на основе разности амплитудных компонент скорости вращения левого и правого колес, которая является разностью между упомянутыми
вычисленными характеристиками скорости вращения колес, и взаимосвязи, которая является упомянутой соответствующей взаимосвязью, между высотой расположения колес и фактической амплитудной компонентой скорости вращения колес, которая основана на импульсе неровности дорожного покрытия и скорости вращения колес на конкретной для амплитудной компоненты частоте.
3. Устройство по п. 1 или 2, дополнительно содержащее средство определения скорости транспортного средства;
при этом средство оценки высоты посадки транспортного средства выполнено с возможностью:
выполнения частотного анализа определяемой скорости вращения колес для пары передних и задних колес и вычисления разности фазовых компонент переднего и заднего колес на конкретной для фазовой компоненты частоте;
вычисления на основе определяемой скорости транспортного средства входной разности фазовых компонент, которая является разностью фазовых компонент между вводами переднего колеса и заднего колеса; и
вычисления, в качестве высоты посадки транспортного средства, высоты расположения колес для заднего колеса на основе вычисленной разности фазовых компонент переднего и заднего колес, входной разности фазовых компонент и взаимосвязи, которая является упомянутой соответствующей взаимосвязью, между высотой расположения колес и фактической фазовой компонентой скорости вращения колес, которая основана на импульсе неровности дорожного покрытия и скорости вращения колес на конкретной для фазовой компоненты частоте.
4. Устройство по п. 1 или 2, дополнительно содержащее устройство модификации состояния подвески, которое модифицирует состояние подвески каждого колеса относительно кузова транспортного средства;
при этом упомянутая соответствующая взаимосвязь отличается в зависимости от состояния подвески каждого колеса; и
средство оценки высоты посадки транспортного средства выполнено с возможностью оценки высоты посадки транспортного средства на основе упомянутой соответствующей взаимосвязи согласно упомянутому состоянию подвески.
5. Способ оценки высоты посадки транспортного средства, при котором:
определяют скорость вращения колес, которая представляет собой скорость вращения каждого колеса; и
оценивают высоту посадки транспортного средства на основе соответствующей взаимосвязи между высотой расположения колес для упомянутого колеса относительно кузова транспортного средства и значением, которое основано на упомянутой скорости вращения колес и импульсе неровности дорожного покрытия, который поступает с дорожного покрытия в упомянутое колесо, и на основе определяемой скорости вращения колес для пары колес.
6. Способ по п. 5, при котором дополнительно выполняют частотный анализ определяемой скорости вращения колес для пары левого и правого колес и вычисляют соответствующие характеристики скорости вращения колес для левого и правого колес на конкретной для амплитудной компоненты частоте;
при этом при оценке высоты посадки транспортного средства
оценивают, в качестве высоты посадки транспортного средства, относительную высоту одного из левого и правого колес относительно другого из левого и правого колес на основе разности амплитудных компонент скорости вращения левого и правого колес, которая является разностью между упомянутыми вычисленными характеристиками скорости вращения колес, и взаимосвязи, которая является упомянутой соответствующей взаимосвязью, между высотой расположения колес и фактической амплитудной компонентой скорости вращения колес, которая основана на импульсе неровности дорожного покрытия и скорости вращения колес на конкретной для амплитудной компоненты частоте.
7. Способ по п. 5 или 6, при котором дополнительно:
определяют скорость транспортного средства;
выполняют частотный анализ определяемой скорости вращения колес для пары передних и задних колес и вычисляют разность фазовых компонент переднего и заднего колес на конкретной для фазовой компоненты частоте; и
вычисляют на основе определяемой скорости транспортного средства входную разность фазовых компонент, которая является разностью фазовых компонент между вводами переднего колеса и заднего колеса,
при этом при оценке высоты посадки транспортного средства вычисляют, в качестве упомянутой высоты посадки транспортного средства, высоту расположения колес для заднего колеса на основе вычисленной разности фазовых компонент переднего и заднего колес, упомянутой входной разности фазовых компонент и взаимосвязи, которая является упомянутой соответствующей
взаимосвязью, между высотой расположения колес и фактической фазовой компонентой скорости вращения колес, которая основана на импульсе неровности дорожного покрытия и скорости вращения колес на конкретной для фазовой компоненты частоте.
8. Способ по п. 5 или 6, при котором упомянутая соответствующая взаимосвязь отличается в зависимости от состояния подвески каждого колеса относительно кузова транспортного средства, причем состояние модифицируется посредством устройства модификации состояния подвески;
при этом при оценке высоты посадки транспортного средства упомянутая высота посадки транспортного средства оценивается на основе упомянутой соответствующей взаимосвязи согласно упомянутому состоянию подвески.
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |

