1. Область техники, к которой относится изобретение
[0001] Изобретение относится к приводному устройству транспортного средства, которое может создавать разные движущие силы, по крайней мере, в паре, состоящей из левого и правого колес.
2. Описание известного уровня техники
[0002] Когда транспортное средство, например пассажирский автомобиль или грузовик, поворачивает по кривой, оно испытывает крен из-за внутренней силы, действующей в направлении внешней стороны кривой. В опубликованной заявке JP-A-2005-306152 на патент Японии описано приводное устройство, которое независимо приводит в движение четыре колеса транспортного средства и предотвращает крен транспортного средства посредством регулирования движущей силы для каждого ведущего колеса.
[0003] Однако поскольку с помощью регулирования, выполняемого приводным устройством, описанным в данной публикации, лишь предотвращается крен транспортного средства, поворачивающий момент транспортного средства может стать меньше уровня, необходимого для того, чтобы транспортное средство осуществляло поворот правильно, или может превысить указанный уровень и, следовательно, ухудшить дорожные качества данного транспортного средства. То есть в данном случае не могут быть эффективно достигнуты эксплуатационные характеристики, необходимые водителю.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0004] Учитывая вышеизложенное, изобретение создано, чтобы предоставить приводное устройство транспортного средства, которое обеспечивает достижение эксплуатационных характеристик, необходимых водителю, благодаря чему улучшаются дорожные качества транспортного средства.
[0005] Первый аспект изобретения относится к приводному устройству транспортного средства, которое может создавать разные движущие силы, по меньшей мере, в паре, состоящей соответственно из левого и правого ведущих колес. Данное приводное устройство транспортного средства приводит в движение левое и правое ведущие колеса с помощью движущих сил, которые определяются на основании суммарной движущей силы, необходимой для ведущих колес, сил противодействия движущим силам на ведущих колесах и, по меньшей мере, двух из следующих целевых моментов: целевого момента, требуемого в направлении поворота транспортного средства в горизонтальной плоскости, целевого момента, требуемого в направлении поперечного наклона транспортного средства, и целевого момента, требуемого в направлении продольного наклона транспортного средства.
[0006] Как упоминалось выше, данное приводное устройство транспортного средства определяет движущие силы для левого и правого ведущих колес в зависимости от суммарной движущей силы, необходимой для ведущих колес, сил противодействия движущим силам на ведущих колесах и, по меньшей мере, двух из следующих целевых моментов: целевого момента, требуемого в направлении поворота транспортного средства в горизонтальной плоскости, целевого момента, требуемого в направлении поперечного наклона транспортного средства, и целевого момента, требуемого в направлении продольного наклона транспортного средства. Кроме того, данное приводное устройство транспортного средства регулирует движущие силы на соответствующих ведущих колесах так, чтобы получить, по меньшей мере, два из следующих целевых моментов: целевого поворачивающего момента, целевого момента крена и целевого момента наклона относительно поперечной оси. Следовательно, приводное устройство транспортного средства в соответствии с первым аспектом настоящего изобретения позволяет достичь эксплуатационных показателей, необходимых водителю, и тем самым улучшает дорожные качества транспортного средства.
[0007] Описанное выше приводное устройство транспортного средства может быть таким, чтобы движущие силы для левого и правого ведущих колес определялись на основании, по меньшей мере, двух из следующих соотношений: соотношения между целевым моментом в направлении поворота транспортного средства в горизонтальной плоскости и разностью между движущей силой для левого ведущего колеса и движущей силой для правого ведущего колеса, соотношения между целевым моментом в направлении поперечного наклона транспортного средства и разностью между силой противодействия движущей силе на левом ведущем колесе и силой противодействия движущей силе на правом ведущем колесе, а также соотношения между целевым моментом в направлении продольного наклона транспортного средства и силами противодействия движущим силам на левом и правом ведущих колесах.
[0008] Приводное устройство транспортного средства, описанное выше, может быть таким, чтобы движущие силы для левого и правого ведущих колес определялись с использованием целевого момента в направлении поворота транспортного средства в горизонтальной плоскости, целевого момента в направлении поперечного наклона транспортного средства и целевого момента в направлении продольного наклона транспортного средства.
[0009] Приводное устройство транспортного средства, описанное выше, может быть таким, чтобы движущие силы для левого и правого ведущих колес определялись с использованием целевого момента в направлении поворота транспортного средства в горизонтальной плоскости и целевого момента в направлении поперечного наклона транспортного средства.
[0010] Приводное устройство транспортного средства, описанное выше, может быть таким, что, когда невозможно одновременно получить целевой момент в направлении поворота транспортного средства в горизонтальной плоскости, целевой момент в направлении поперечного наклона транспортного средства и целевой момент в направлении продольного наклона транспортного средства, можно получить, по меньшей мере, целевой момент в направлении поворота транспортного средства в горизонтальной плоскости или целевой момент в направлении поперечного наклона транспортного средства.
[0011] Приводное устройство транспортного средства, описанное выше, может быть таким, что когда невозможно одновременно получить целевой момент в направлении поворота транспортного средства в горизонтальной плоскости и целевой момент в направлении поперечного наклона транспортного средства, если значение поворачивающего момента транспортного средства, который, по оценкам, возникнет в ответ на движущие силы, создаваемые на левом и правом ведущих колесах для регулирования крена транспортного средства, превышает предельное значение поворачивающего момента транспортного средства, то достигается целевой момент в направлении поворота транспортного средства в горизонтальной плоскости.
[0012] Приводное устройство транспортного средства, описанное выше, может быть таким, что, когда невозможно одновременно достичь целевого момента в направлении поворота транспортного средства в горизонтальной плоскости и целевого момента в направлении поперечного наклона транспортного средства, достигается целевой момент в направлении поперечного наклона транспортного средства.
[0013] Приводное устройство транспортного средства, описанное выше, может быть таким, что, когда невозможно одновременно достичь целевого момента в направлении поворота транспортного средства в горизонтальной плоскости и целевого момента в направлении поперечного наклона транспортного средства, достигается целевой момент в направлении поворота транспортного средства в горизонтальной плоскости.
[0014] Приводное устройство транспортного средства, описанное выше, может быть таким, что решение о том, достигать целевого момента в направлении поворота транспортного средства в горизонтальной плоскости или целевого момента в направлении поперечного наклона транспортного средства, принимается на основании угла поворота управляемого колеса транспортного средства и скорости изменения угла поворота.
[0015] Приводное устройство транспортного средства, описанное выше, может быть таким, что определяется достигать значения целевого момента в направлении поперечного наклона, если значение угла поворота равно или меньше заданного порогового значения и скорость изменения угла поворота не равна нулю.
[0016] Приводное устройство транспортного средства, описанное выше, может быть таким, что определяется достигать значения целевого момента в направлении поворота в горизонтальной плоскости, если значение угла поворота больше заданного порогового значения или если скорость изменения угла поворота равна нулю.
[0017] Приводное устройство транспортного средства, описанное выше, может быть таким, чтобы в указанных ведущих колесах были предусмотрены электродвигатели, создающие движущие силы для ведущих колес.
[0018] Таким образом, приводное устройство транспортного средства в соответствии с настоящим изобретением позволяет достичь эксплуатационных показателей, желательных водителю, и тем самым улучшить дорожные качества транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0019] Особенности, преимущества, техническая и промышленная значимость настоящего изобретения будут более понятны из последующего подробного описания предпочтительных примеров осуществления настоящего изобретения в связи с прилагаемыми чертежами.
На фиг.1 представлен вид, схематически отображающий конфигурацию транспортного средства, в состав которого входит приводное устройство транспортного средства в соответствии с первым предпочтительным примером осуществления;
На фиг.2 представлен иллюстративный вид, отображающий примерную структуру узла подвески передних колес, который включен в приводное устройство транспортного средства первого предпочтительного примера осуществления настоящего изобретения;
На фиг.3 представлен иллюстративный вид, отображающий примерную структуру узла подвески задних колес, который включен в приводное устройство транспортного средства первого примера осуществления настоящего изобретения;
На фиг.4 представлен иллюстративный вид, отображающий модифицированный предпочтительный пример приводного устройства транспортного средства первого предпочтительного примера осуществления настоящего изобретения;
На фиг.5А представлен концептуальный вид, иллюстрирующий схему управления динамикой транспортного средства в первом предпочтительном примере осуществления настоящего изобретения;
На фиг.5В представлен концептуальный вид, иллюстрирующий схему управления динамикой транспортного средства в первом предпочтительном примере осуществления настоящего изобретения;
На фиг.5С представлен концептуальный вид, иллюстрирующий схему управления динамикой транспортного средства в первом предпочтительном примере осуществления настоящего изобретения;
На фиг.6 представлен иллюстративный вид, отображающий примерную конфигурацию устройства управления динамикой транспортного средства в первом предпочтительном примере осуществления настоящего изобретения;
На фиг.7 представлена блок-схема, отображающая процедуру управления транспортным средством в первом предпочтительном примере осуществления настоящего изобретения;
На фиг.8 представлена блок-схема, отображающая процедуру управления транспортным средством в первом предпочтительном примере осуществления настоящего изобретения;
На фиг.9 представлена таблица, иллюстрирующая один пример весовых коэффициентов, в которой приведены значения весового коэффициента Y; и
На фиг.10 представлена блок-схема, отображающая процедуру управления транспортным средством во втором предпочтительном примере осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
[0020] Настоящее изобретение будет раскрыто более подробно в последующем описании и прилагаемых чертежах со ссылками на предпочтительные примеры осуществления. В последующих предпочтительных примерах осуществления настоящего изобретения изобретение в основном применяется к транспортным средствам с электродвигателем. Однако область применения настоящего изобретения не ограничивается транспортными средствами с электродвигателем, но может включать в себя любые транспортные средства, в которых предусмотрены разные движущие силы, по меньшей мере, в паре, состоящей соответственно из левого и правого ведущих колес. Движущая сила для правого колеса и движущая сила для левого ведущего колеса могут регулироваться посредством регулирования каждой движущей силы независимо или посредством регулирования коэффициента распределения движущей силы между левым и правым ведущими колесами.
[0021] Сначала будет описано приводное устройство транспортного средства в соответствии с первым предпочтительным примером осуществления настоящего изобретения. Приводное устройство транспортного средства характеризуется следующими признаками. Во-первых, движущие силы для левого и правого ведущих колес определяются на основании суммарной движущей силы, необходимой для ведущих колес, сил противодействия движущим силам на ведущих колесах и, по меньшей мере, двух из следующих целевых моментов: целевого момента для транспортного средства, требуемого в направлении поворота в горизонтальной плоскости транспортного средства (целевого поворачивающего момента), целевого момента транспортного средства, требуемого в направлении поворота относительно продольной оси транспортного средства (целевого момента крена), а также целевого момента транспортного средства, требуемого в направлении поворота относительно поперечной оси транспортного средства (целевого момента наклона). Далее, движущие силы на соответствующих ведущих колесах регулируются так, чтобы одновременно достичь, по меньшей мере, двух из следующих целевых моментов: целевого поворачивающего момента, целевого момента крена и целевого момента наклона. В отношении выбора, по меньшей мере, двух из трех целевых моментов, управление динамикой транспортного средства первого предпочтительного примера осуществления настоящего изобретения выполняется так, чтобы одновременно достичь целевого поворачивающего момента и целевого момента крена. Заметим, что в альтернативном случае управление динамикой транспортного средства может выполняться так, чтобы одновременно достичь целевого момента крена и целевого момента наклона.
[0022] На фиг.1 представлен вид, схематически отображающий конфигурацию транспортного средства, в состав которого входит приводное устройство транспортного средства первого предпочтительного примера осуществления настоящего изобретения. На фиг.2 представлен иллюстративный вид, отображающий примерную структуру узла подвески передних колес, входящего в состав приводного устройства транспортного средства первого предпочтительного примера осуществления настоящего изобретения. На фиг.3 представлен иллюстративный вид, отображающий примерную структуру узла подвески задних колес, входящего в состав приводного устройства транспортного средства первого предпочтительного примера осуществления настоящего изобретения. Транспортное средство 1 содержит приводное устройство 100 транспортного средства, в котором для создания движущей силы используются только электродвигатели. Приводное устройство 100 транспортного средства определяет движущие силы для переднего левого колеса 2l, переднего правого колеса 2r, заднего левого колеса 3l и заднего правого колеса 3r на основании сил противодействия движущим силам на переднем левом колесе 2l, переднем правом колесе 2r, заднем левом колесе 3l и заднем правом колесе 3r, суммарной движущей силы для транспортного средства 1 и, по меньшей мере, двух из следующих целевых моментов: целевого поворачивающего момента, целевого момента крена и целевого момента наклона. Приводное устройство 100 транспортного средства содержит узел 8 подвески передних колес, присоединенный к транспортному средству 1 и поддерживающий переднее левое колесо 2l и переднее правое колесо 2r, а также узел 9 подвески задних колес, присоединенный к транспортному средству 1 и поддерживающий заднее левое колесо 3l и заднее правое колесо 3r.
[0023] В первом предпочтительном примере осуществления настоящего изобретения передний левый электродвигатель 10l, предназначенный для приведения в движение переднего левого колеса 2l, передний правый электродвигатель 10r, предназначенный для приведения в движение переднего правого колеса 2r, задний левый электродвигатель 11l, предназначенный для приведения в движение заднего левого колеса, и задний правый электродвигатель 11r, предназначенный для приведения в движение заднего правого колеса 3r, являются устройствами, создающими движущую силу. Управление движущей силой для передних колес и движущей силой для задних колес осуществляется раздельно с помощью устройства 30 управления динамикой транспортного средства, встроенного в устройство 50 ECU (Electric Control Unit - электронное управляющее устройство). В первом предпочтительном примере осуществления настоящего изобретения устройство 30 управления динамикой транспортного средства служит в качестве устройства для изменения движущей силы с целью изменения движущей силы для каждого ведущего колеса транспортного средства 1.
[0024] Здесь необходимо заметить, что в данном описании «левая сторона» и «правая сторона» определяются по отношению к направлению, в котором транспортное средство 1 движется вперед (направление, указанное стрелкой X на фиг.1). В частности, «левая сторона» и «правая сторона» относятся к левой стороне и правой стороне, если смотреть из транспортного средства 1, ориентированного в направлении вперед. Аналогичным образом, «передняя» относится к стороне, обращенной в направлении движения транспортного средства 1 вперед, а «задняя» относится к стороне, обращенной в направлении движения транспортного средства 1 назад, то есть к стороне, противоположной стороне, в которую транспортное средство движется вперед.
[0025] В приводном устройстве 100 транспортного средства переднее левое колесо 2l, переднее правое колесо 2r, заднее левое колесо 3l и заднее правое колесо 3r приводятся в движение отдельными электродвигателями. То есть все колеса транспортного средства 1 являются ведущими колесами. Другими словами, переднее левое колесо 2l, переднее правое колесо 2r, заднее левое колесо 3l и заднее правое колесо 3r являются ведущими колесами транспортного средства 1. В приводном устройстве 100 транспортного средства переднее левое колесо 2l, переднее правое колесо 2r, заднее левое колесо 3l и заднее правое колесо 3r приводятся в движение напрямую четырьмя электродвигателями: передним левым электродвигателем 10l, передним правым электродвигателем 10r, задним левым электродвигателем 11l и задним правым электродвигателем 11r. Передний левый электродвигатель 10l, передний правый электродвигатель 10r, задний левый электродвигатель 11l и задний правый электродвигатель 11r являются встроенными в колеса электродвигателями и смонтированы в дисках колес - переднего левого колеса 2l, переднего правого колеса 2r, заднего левого колеса 3l и заднего правого колеса 3r соответственно.
[0026] Заметим, что между каждым колесом и электродвигателем может быть предусмотрен механизм преобразования скорости для того, чтобы вращение переднего левого электродвигателя 10l, переднего правого электродвигателя 10r, заднего левого электродвигателя 11l и заднего правого электродвигателя 11r передавалось на преобразованной скорости на переднее левое колесо 2l, переднее правое колесо 2r, заднее левое колесо 3l и заднее правое колесо 3r соответственно. Обычно меньшие электродвигатели создают меньшие крутящие моменты. Однако поскольку крутящий момент электродвигателя можно увеличивать с использованием механизма преобразования скорости, то использование механизма преобразования скорости позволяет использовать малые электродвигатели в качестве переднего левого электродвигателя 10l, переднего правого электродвигателя 10r, заднего левого электродвигателя 11l и заднего правого электродвигателя 11r соответственно.
[0027] Электронное управляющее устройство ECU 50 предназначено для управления передним левым электродвигателем 101, передним правым электродвигателем 10r, задним левым электродвигателем 11l и задним правым электродвигателем 11r так, чтобы требуемым образом регулировать движущие силы на соответствующих ведущих колесах. В первом предпочтительном примере осуществления настоящего изобретения суммарная движущая сила F приводного устройства 100 транспортного средства и движущие силы на соответствующих ведущих колес 2l, 2r, 3l и 3r регулируются на основании силы нажатия на педаль 5 газа, которая определяется датчиком 42 силы нажатия на педаль акселератора.
[0028] Углы поворота и частота вращения переднего левого электродвигателя 10l, переднего правого электродвигателя 10r, заднего левого электродвигателя 11l и заднего правого электродвигателя 11r определяются соответственно передним левым решающим устройством 40l, передним правым решающим устройством 40r, задним левым решающим устройством 41l и задним правым решающим устройством 41r. Сигналы с выходов переднего левого решающего устройства 40l, переднего правого решающего устройства 40r, заднего левого решающего устройства 41l и заднего правого решающего устройства 41r подаются на электронное управляющее устройство ECU 50 и используются при управлении передним левым электродвигателем 10l, передним правым электродвигателем 10r, задним левым электродвигателем 11l и задним правым электродвигателем 11r.
[0029] Передний левый электродвигатель 10l, передний правый электродвигатель 10r, задний левый электродвигатель 10l и задний правый электродвигатель 11r подключены к инверторному устройству 6. Инверторное устройство 6 подключено к источнику 7 электропитания в транспортном средстве, которым может быть, например, никель-водородная батарея или свинцово-кислотная батарея. Электроэнергия, когда это необходимо, подается из источника 7 электропитания в транспортном средстве через инверторное устройство 6 на передний левый электродвигатель 10l, передний правый электродвигатель 10r, задний левый электродвигатель 11l и задний правый электродвигатель 11r. Указанные выходы электроэнергии управляются инверторным устройством 6, которое функционирует в соответствии с командами, выдаваемыми из электронного управляющего устройств ECU 50. В первом предпочтительном примере осуществления настоящего изобретения предусмотрен один инвертор на один электродвигатель. То есть инверторное устройство 6 состоит из четырех инверторов, предназначенных соответственно для переднего левого электродвигателя 10l, переднего правого электродвигателя 10r, заднего левого электродвигателя 11l и заднего правого электродвигателя 11r.
[0030] Когда передний левый электродвигатель 10l, передний правый электродвигатель 10r, задний левый электродвигатель 11l и задний правый электродвигатель 11r работают на создание движущей силы для приведения в движение транспортного средства 1, электроэнергия подается из источника 7 электропитания в транспортном средстве на соответствующие электродвигатели 10l, 10r, 11l и 11r через инверторное устройство 6. С другой стороны, когда транспортное средство 1 замедляет свое движение, передний левый электродвигатель 10l, передний правый электродвигатель 10r, задний левый электродвигатель 11l и задний правый электродвигатель 11r работают как электрогенераторы, осуществляющие рекуперацию электроэнергии, и рекуперированная электроэнергия сохраняется в источнике 7 электропитания транспортного средства. При осуществлении рекуперации электроэнергии электронное управляющее устройство ECU 50 управляет инверторным устройством 6 в зависимости от поданных сигналов, например сигналов торможения и отпускания педали газа.
[003l] Со ссылкой на фиг.2, передний левый электродвигатель 10l соединен с узлом 8 подвески передних колес. То есть передний левый электродвигатель 10l соединен с транспортным средством 1 с помощью узла 8 подвески передних колес. Другими словами, в транспортном средстве 1 передний левый электродвигатель 10l поддерживается посредством узла 8 подвески передних колес. Заметим, что конструкция для крепления переднего правого электродвигателя 10r одинакова с той, что и для переднего левого электродвигателя 10l. С другой стороны, со ссылкой на фиг.3, задний правый электродвигатель 11r соединен с узлом 9 подвески задних колес. То есть задний правый электродвигатель 11r соединен с транспортным средством 1 с помощью узла 9 подвески задних колес. Другими словами, в транспортном средстве 1 задний правый электродвигатель 11r поддерживается с помощью узла 9 подвески задних колес. Заметим, что опорная конструкция для заднего левого электродвигателя 11l такая же, как и для заднего правого электродвигателя 11r. Далее со ссылкой на фиг.2 и фиг.3 будут более подробно описаны конструкции узла 8 подвески передних колес и узла 9 подвески задних колес.
[0032] Со ссылкой на фиг.2, узел 8 подвески передних колес первого предпочтительного примера осуществления настоящего изобретения содержит конструкцию так называемой подвески со стойкой. На одном конце амортизатора 20 предусмотрена верхняя опора 20U, и посредством этой верхней опоры 20U амортизатор 20 крепится к корпусу 1 В транспортного средства. На другом конце амортизатора 20 предусмотрен кронштейн 20 В для крепления электродвигателя. Этот кронштейн 20 В для крепления электродвигателя присоединен к боковому кронштейну 10lb электродвигателя, сформированному как часть основного корпуса переднего левого электродвигателя 10l, с помощью которого соединены друг с другом амортизатор 20 и передний левый электродвигатель 10l. На ведущем валу (ведущем валу электродвигателя) 10ls переднего левого электродвигателя 10l смонтировано переднее левое решающее устройство 40l. Переднее левое решающее устройство 40l служит для определения угла поворота ведущего вала 10ls электродвигателя. Частота вращения переднего левого электродвигателя 10l может определяться путем обработки сигналов, детектированных передним левым решающим устройством 40l.
[0033] Поворотная часть 10lp находится в положении, симметричном с положением бокового кронштейна 10lb электродвигателя относительно ведущего вала электродвигателя 10ls. Поворотная часть 10lp вставляется в поворотную приемную часть 28 поперечного звена (нижнего рычага) 22 и фиксируется с помощью штифта. Поперечное звено 22 крепится к корпусу 1 В транспортного средства с помощью крепежной части 27. При перемещении переднего левого электродвигателя 10l вверх и вниз в вертикальном направлении (это направление на фиг.2 показано стрелками Y) поперечное звено 22 поворачивается вокруг оси Zsf качания в крепежной части 27. Заметим, что «вертикальное направление» - это направление, в котором действует сила тяжести.
[0034] Тормозной ротор 15 переднего колеса и диск 13 переднего колеса закреплены на ведущем валу 10ls электродвигателя. На диск 13 переднего колеса надевается шина, тем самым формируется переднее левое колесо 2l (фиг.1). Диск 13 переднего колеса перемещается вверх и вниз из-за входных воздействий со стороны поверхности дороги на переднее левое колесо 2l. Поскольку диск 13 переднего колеса закреплен на ведущем валу 10ls электродвигателя, передний левый электродвигатель 10l перемещается вверх и вниз в соответствии с перемещением вверх и вниз диска 13 переднего колеса. Такое вертикальное перемещение переднего левого электродвигателя 10l амортизируется пружиной 20S и амортизатором 20 узла 8 подвески передних колес.
[0035] Поскольку передний левый электродвигатель 10l и поперечное звено 22 прикреплены друг к другу с помощью штифтового соединения поворотной части 10lp и приемной поворотной части 28, когда передний левый электродвигатель 10l перемещается вверх и вниз, поперечное звено 22 поворачивается вокруг оси Zsf качания. Кроме того, при повороте рулевого колеса 4 происходит управление передним левым электродвигателем 10l вместе с диском 13 переднего колеса и шиной. В то же время поворотная часть 10lp поворачивается на поворотной приемной части 28. Далее будет рассмотрен узел 9 подвески задних колес.
[0036] Со ссылкой на фиг.3, узел 9 подвески задних колес первого предпочтительного примера осуществления настоящего изобретения содержит конструкцию так называемой подвески с торсионной балкой. Задний правый электродвигатель 11r крепится к одному концу рычага 25, сформированному в виде части торсионной балки 24. На каждом конце рычага 25 предусмотрена крепежная часть 26, то есть на конце, противоположном по отношению к концу, на котором закреплен задний правый электродвигатель 11r. Рычаг 25 прикреплен к корпусу 1 В транспортного средства с помощью крепежной части 26 транспортного средства. Рычаг 25 поворачивается вокруг оси Zsr качания в крепежной части 26 транспортного средства. В торсионной балке 24 имеется приемная часть 21 пружинного амортизатора. Между приемной частью 21 пружинного амортизатора и корпусом 1 В транспортного средства смонтированы пружина и амортизатор узла 9 подвески задних колес. В первом предпочтительном примере осуществления настоящего изобретения пружина и амортизатор узла 9 подвески задних колес объединены в единый пружинно-амортизационный механизм 29.
[0037] На ведущем валу (ведущем валу электродвигателя) 11rs заднего правого электродвигателя 11r смонтировано заднее правое решающее устройство 41r. Заднее правое решающее устройство 41r предназначено для определения угла поворота ведущего вала 11rs электродвигателя. Частоту вращения заднего правого электродвигателя 11r можно определять путем обработки сигналов, детектируемых задним правым решающим устройством 41r. Тормозной ротор 16 заднего колеса и диск 14 заднего колеса закреплены на ведущем валу 11rs электродвигателя. На диск 14 заднего колеса надевается шина, тем самым формируется заднее правое колесо 3r (фиг.1).
[0038] Диск 14 заднего колеса перемещается вверх и вниз из-за входных воздействий со стороны поверхности дороги на заднее правое колесо 3r. Поскольку диск 14 заднего колеса закреплен на ведущем валу 11rs электродвигателя, задний правый электродвигатель 11r перемещается вверх и вниз в соответствии с перемещением вверх и вниз диска 14 заднего колеса. Такое вертикальное перемещение заднего правого электродвигателя 11r передается через приемную часть 21 пружинного амортизатора на пружинно-амортизирующий механизм 29 узла 9 подвески задних колес и амортизируется пружинно-амортизирующим механизмом 29. Заметим, что узел 8 подвески передних колес и узел 9 подвески задних колес не ограничены описанными выше узлами подвески, и в альтернативном случае в их состав могут входить другие механизмы подвески, такие как механизмы многорычажной подвески и узлы подвески с сдвоенными поперечными рычагами.
[0039] В описанной выше конфигурации приводного устройства транспортного средства 100, где передний левый электродвигатель 10l, передний правый электродвигатель 10r, задний левый электродвигатель 11l и задний правый электродвигатель 11r, которые являются устройствами, создающими движущую силу, соединены с соответствующими узлами подвески, силы противодействия движущим силам, создаваемым электродвигателями на соответствующих ведущих колесах (далее «силами противодействия движению»), большей частью передаются на узлы подвески. В таком случае вертикальные компоненты каждого ведущего колеса, создаваемые при вращении электродвигателя, почти без потерь переходят в компоненты сил противодействия движению, которые действуют на пружину транспортного средства. Ниже будет описано несколько примеров приводного устройства транспортного средства первого предпочтительного примера осуществления настоящего изобретения.
[0040] На фиг.4 представлен иллюстративный вид, отображающий модифицированный пример приводного устройства транспортного средства первого предпочтительного примера осуществления настоящего изобретения. В приводном устройстве 101 транспортного средства используется двигатель 60 внутреннего сгорания, предназначенный для создания движущей силы, приводящей в движение транспортное средство. Приводное устройство 101 транспортного средства может изменять распределение движущей силы соответственно между стороной передних колес и стороной задних колес. Выходной момент двигателя 60 внутреннего сгорания передается на трансмиссию 61, имеющую устройство распределения движущих сил на передних колесах, и затем - на переднее левое колесо 2l и переднее правое колесо 2r - соответственно через передний левый ведущий вал 65l и передний правый ведущий вал 65r. Кроме того, выходной момент двигателя 60 внутреннего сгорания через устройство 62 распределения движущих сил на передних и задних колесах передается на карданный вал 63. Затем выходной момент двигателя 60 внутреннего сгорания с карданного вала 63 передается на заднее левое колесо 3l и заднее правое колесо 3r соответственно через задний левый ведущий вал 66l колеса и задний правый ведущий вал 66r колеса.
[0041] Устройство 30 управления динамикой транспортного средства электронного управляющего устройства ECU 50 определяет коэффициент распределения движущих сил при передаче их на переднее левое колесо 2l, переднее правое колесо 2r, заднее левое колесо 3l и заднее правое колесо 3r, а выходной момент двигателя 60 внутреннего сгорания распределяется с заданным коэффициентом распределения на соответствующие ведущие колеса через трансмиссию 61, содержащую устройство распределения движущих сил на передних колесах, устройство 62 распределения движущих сил на передних и задних колесах и устройство 64 распределения движущих сил на задних колесах.
В данном примере изменений двигатель 60 внутреннего сгорания, устройство 62 распределения движущих сил на передних и задних колесах и устройство 64 распределения движущих сил на задних колесах вместе составляют устройство, создающее движущую силу. Далее описывается способ, который в соответствии с данным примером осуществления настоящего изобретения применяется устройством управления динамикой транспортного средства с целью определения движущей силы для каждого ведущего колеса.
[0042] На фиг.5А - 5С представлены концептуальные виды, иллюстрирующие схему управления динамикой транспортного средства первого предпочтительного примера осуществления настоящего изобретения. На фиг.5А - фиг.5С «G» обозначает центр тяжести транспортного средства 1, «h» обозначает высоту центра тяжести транспортного средства 1, «ORf» обозначает мгновенный центр вращения узлов подвески передних колес, «ORr» обозначает мгновенный центр вращения узлов подвески задних колес, «hfs» обозначает высоту мгновенного центра вращения узлов подвески передних колес, «hfr» обозначает высоту мгновенного центра вращения узлов подвески задних колес, «Df» обозначает колею передних колес, и «Dr» обозначает колею задних колес. Кроме того, «L» обозначает расстояние (между передней и задней осями) между осью Zf переднего левого колеса 2l и переднего правого колеса 2r (передней осью) и осью Zr заднего левого колеса 3l и заднего правого колеса 3r (задней осью), «Lf» обозначает горизонтальное расстояние между центром тяжести G и осью Zf, a «Lr» обозначает горизонтальное расстояние между центром тяжести G и осью Zr.
[0043] Следует заметить, что «мгновенный центр вращения» представляет собой мгновенный центр вращения каждого узла подвески (узлов 8 подвески передних колес, узлов 9 подвески задних колес), если глядеть со стороны каждого узла подвески, то есть со стороны колес (переднего левого колеса 2l, заднего правого колеса 3r). Другими словами, это мгновенный центр вращения каждого узла подвески (узлов 8 подвески передних колес, узлов 9 подвески задних колес), если смотреть в направлении, перпендикулярном направлению, в котором движется транспортное средство.
[0044] В транспортном средстве 1 первого предпочтительного примера осуществления настоящего изобретения высота hfs мгновенного центра вращения узлов подвески передних колес и высота hfr мгновенного центра вращения узлов подвески задних колес ниже высоты h центра тяжести транспортного средства 1, а мгновенный центр вращения ORf узлов подвески передних колес и мгновенный центр вращения ORr узлов подвески задних колес расположены между осью Zf и осью Zr. Здесь следует отметить, что положения мгновенного центра вращения ORf узлов подвески передних колес и мгновенного центра вращения ORr узлов подвески задних колес не ограничены теми, что описаны выше.
[0045] В системе управления динамикой транспортного средства первого предпочтительного примера осуществления настоящего изобретения управление движением поворота (поворота вокруг оси Z) и движением крена (поворота вокруг оси X) транспортного средства 1 производится посредством регулирования движущих сил на соответствующих ведущих колесах. В систему уравнений (1) входят движущие силы Ffl, Ffr, Frl и Frr для соответствующих ведущих колес, целевой поворачивающий момент Mzref, необходимый для управления движением поворота в горизонтальной плоскости, силы противодействия движущим силам на соответствующих ведущих колесах, целевой момент Mxref крена, необходимый для управления движением крена, суммарная движущая сила F для транспортного средства 1 в переднем и обратном направлениях (суммарная движущая сила приводного устройства 100 транспортного средства далее называется «суммарной движущей силой F») и коэффициент i распределения суммарной движущей силы F между стороной передних колес и стороной задних колес (далее «коэффициент i распределения движущей силы на передних и задних колесах»).
[0046] Целевой поворачивающий момент Mzref можно описывать с использованием разности между движущей силой Ffl для переднего левого колеса 2l и движущей силой Ffr для переднего правого колеса 2r, а также разности между движущей силой Frl для заднего левого колеса 3l и движущей силой Frr для заднего правого колеса 3r, то есть разности между движущей силой для колес на левой стороне и движущей силой для колес на правой стороне транспортного средства 1. Аналогичным образом целевой момент Mxref крена можно выразить в виде разности между силой противодействия движущей силе Ffl на переднем левом колесе 2l и силой противодействия движущей силе Ffr на переднем правом колесе 2r и разности между силой противодействия движущей силе Frl на заднем левом колесе 3l и силой противодействия движущей силе Frr на заднем правом колесе 3r, то есть разности между силой противодействия движущей силе для колес на левой стороне и силой противодействия движущей силе для колес на правой стороне транспортного средства 1.
[0047] Движущая сила Ffl - это движущая сила для переднего левого колеса 2l (движущая сила переднего левого колеса), движущая сила Ffr - это движущая сила для переднего правого колеса 2r (движущая сила переднего правого колеса), движущая сила Frl - это движущая сила для заднего левого колеса 3l (движущая сила заднего левого колеса), и движущая сила Frr - это движущая сила для заднего правого колеса 3r (движущая сила заднего правого колеса). Решение системы уравнений (1) определяет движущие силы Ffl, Ffr, Frl и Frr, необходимые на соответствующих колесах, чтобы достичь требуемых значений целевого поворачивающего момента Mzref и целевого момента Mxref крена.
[0048]
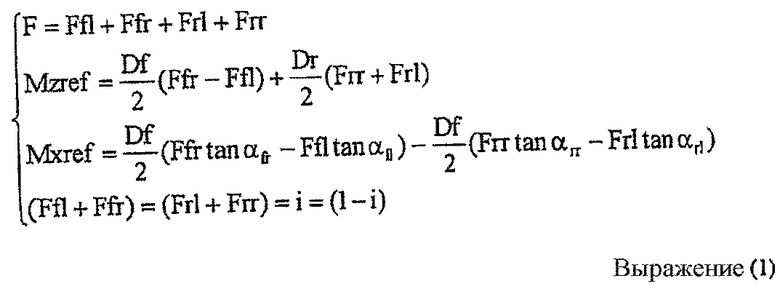
[0049] В приведенных выше уравнениях αf1 обозначает угол поворота мгновенного центра вращения узлов 8 подвески передних колес, в котором закреплено переднее левое колесо 2l, αfr обозначает угол поворота мгновенного центра вращения узлов 8 подвески передних колес, в котором закреплено переднее правое колесо 2r, αr1 обозначает угол поворота мгновенного центра вращения узлов подвески задних колес 9, в котором закреплено заднее левое колесо 3l, и αrr обозначает угол поворота мгновенного центра вращения узлов 9 подвески задних колес, в котором закреплено заднее правое колесо 3r. Выражение Ffl x tanαfl описывает силу противодействия движущей силе Ffl на переднем левом колесе 2l (силу противодействия движущей силе переднего левого колеса), выражение Ffr×tanαfr описывает силу противодействия движущей силе Ffr на переднем правом колесе 2r (силу противодействия движущей силе переднего правого колеса), выражение Frl×tanαrl описывает силу противодействия движущей силе Frl на заднем левом колесе 3l (силу противодействия движущей силе заднего левого колеса), и выражение Frr×tanαrr описывает силу противодействия движущей силе Frr на заднем правом колесе 3r (силу противодействия движущей силе заднего правого колеса).
[0050] Выражение (1) изменяется в зависимости от типа трансмиссии транспортного средства. Например, в случае транспортного средства, содержащего приводное устройство передних колес, или транспортного средства, содержащего приводное устройство, которое может изменять распределение движущих сил только между передним левым и передним правым колесами, значения движущей силы на заднем левом колесе Frl, движущей силы на заднем правом колесе Frr и колеи задних колес Dr, силы противодействия движущей силе на заднем левом колесе Frl×tanαrl и силы противодействия движущей силе на заднем правом колесе Frr×tanαrr, а также коэффициента i распределения движущих сил в выражении (1) - все обнуляются. С другой стороны, в случае транспортного средства, содержащего приводное устройство задних колес, или транспортного средства, содержащего приводное устройство, которое может изменять распределение движущих сил только между задним левым и задним правым колесами, значения движущей силы на переднем левом колесе Ffl, движущей силы на переднем правом колесе Ffr и колеи передних колес Df, силы противодействия движущей силе на переднем левом колесе Ffl×tanαfl и силы противодействия движущей силе на переднем правом колесе Ffr × tanαfr, а также коэффициента i распределения движущих сил в выражении (1) - все обнуляются.
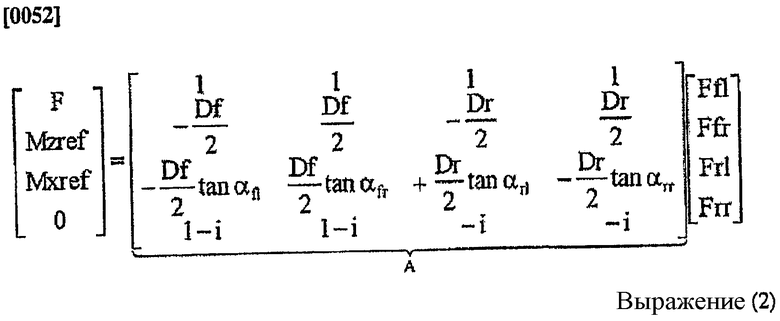
[0051] Если уравнения в выражении (1) выразить в форме матрицы, мы получим выражение (2). Если первую матрицу с правой стороны выражения (2) обозначить как А и если коэффициент распределения движущей силы по передним и задним колесам i≠0.5, то ранг (А) равен 4. Это указывает на то, что матрица А является регулярной и, следовательно, система уравнений (1) имеет решение. В этом случае, как показано в выражении (3), А-1, обратная матрица матрицы А, умножается на каждую сторону выражения (2) из левой стороны, благодаря чему определяются движущие силы Ffl, Ffr, Frl и Frr, необходимые для достижения значений целевого поворачивающего момента Mzref и целевого момента Mxref крена.

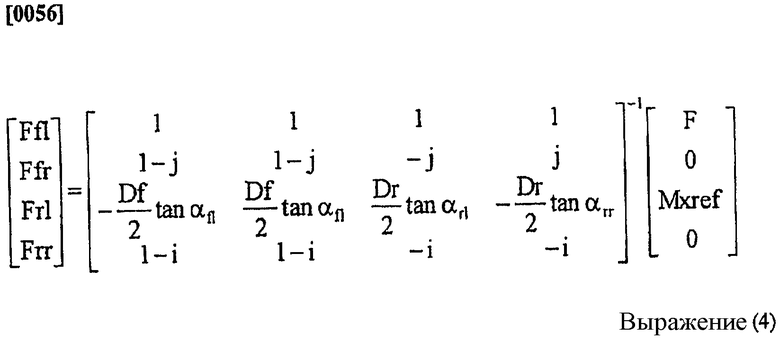
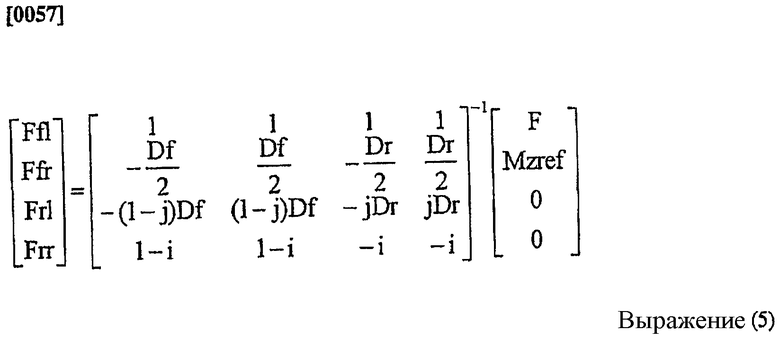
[0054] Например, если коэффициент распределения движущей силы по передним и задним колесам i=0.5, выражение «ранг (А)≠4» истинно и, следовательно, система уравнений (1) не имеет решения. Таким образом, в данном случае невозможно определить движущие силы Ffl, Ffr, Frl и Frr, которые необходимо приложить к соответствующим колесам, чтобы достичь значений целевого поворачивающего момента Mzref и целевого момента Mxref крена. Таким образом, определяются движущие силы Ffl, Ffr, Frl и Frr, которые необходимо приложить к соответствующим колесам, чтобы достичь значений целевого поворачивающего момента Mzref или целевого момента Mxref крена. Выражение (4) используется для определения движущих сил Ffl, Ffr, Frl и Frr, которые необходимо приложить к соответствующим колесам, чтобы достичь значения целевого момента Mxref крена. Выражение (5) используется для определения движущих сил Ffl, Ffr, Frl и Frr, которые необходимо приложить к соответствующим колесам, чтобы достичь значения целевого поворачивающего момента Mzref.
[0055] Заметим, что «j» в выражении (4) представляет разностный коэффициент распределения по передним и задним колесам движущей силы на левых и правых колесах, который является одним из коэффициентов распределения динамических нагрузок между колесами на стороне передних колес и стороне задних колес транспортного средства 1. В частности, разностный коэффициент «j» распределения по передним и задним колесам движущей силы на левых и правых колесах представляет собой коэффициент, при котором целевая разность между движущей силой на колесах на левой стороне (на переднем левом колесе 2l и заднем левом колесе 3l) и движущей силой на колесах на правой стороне (на переднем правом колесе 2r и заднем правом колесе 3r) распределяется на передние колеса (переднее левое колесо 2l и переднее правое колесо 2r) и на задние колеса (заднее левое колесо 3l и заднее правое колесо 3r). Например, когда целевая разность между движущей силой на колесах левой стороны и движущей силой на колесах правой стороны равна 10, разностный коэффициент «j» распределения по передним и задним колесам движущей силы на левых и правых колесах устанавливается так, чтобы на передние колеса было распределено значение 6, а на задние колеса - значение 4.
[0058] Таким образом, при использовании выражений с (3) по (5) можно определить движущие силы Ffl, Ffr, Frl и Frr, которые необходимо приложить к соответствующим колесам, чтобы достичь значений, по меньшей мере, целевого поворачивающего момента Mzref или целевого момента Mxref крена. Тогда управление, по меньшей мере, одним из двух моментов транспортного средства - поворачивающим моментом или моментом крена - осуществляется в зависимости от коэффициента i распределения движущих сил на передних и задних колесах и состояния условий езды транспортного средства 1. Далее, будет описано устройство 30 управления динамикой транспортного средства, выполняющее вышеупомянутое управление динамикой транспортного средства первого предпочтительного примера осуществления настоящего изобретения.
[0059] На фиг.6 представлен иллюстративный вид, отображающий пример конфигурации устройства 30 управления динамикой транспортного средства в первом предпочтительном примере осуществления настоящего изобретения. Как показано на фиг.6, устройство 30 управления динамикой транспортного средства встроено в электронное управляющее устройство ECU 50. Электронное управляющее устройство ECU 50 содержит ЦП (CPU - Central Processing Unit - центральный процессор) 50р, запоминающее устройство 50m для данных, входной порт 55, выходной порт 56, входной интерфейс 57 и выходной интерфейс 58.
[0060] Заметим, что устройство 30 управления динамикой транспортного средства может не входить в состав электронного управляющего устройства ECU 50. В этом случае, например, устройство 30 управления динамикой транспортного средства подключается к электронному управляющему устройству ECU 50 так, чтобы для выполнения управления динамикой транспортного средства в устройстве 30 управления могла использоваться функция электронного управляющего устройства ECU 50 по управлению приводным устройством 100 транспортного средства и т.д. в соответствии с первым предпочтительным примером осуществления настоящего изобретения.
[0061] Устройство 30 управления динамикой транспортного средства включает блок 3l расчета движущих сил, блок 32 определения управляющих воздействий и блок 33 управления движущимися силами. Эти блоки предназначены для выполнения управления динамикой транспортного средства в соответствии с первым предпочтительным примером осуществления настоящего изобретения. В первом предпочтительном примере осуществления настоящего изобретения устройство 30 управления динамикой транспортного средства входит в состав центрального процессора ЦП 50р электронного управляющего устройства ECU 50.
[0062] Блок 31 расчета движущих сил, блок 32 определения управляющих воздействий и блок 33 управления движущими силами устройства 30 управления динамикой транспортного средства соединены друг с другом с помощью шины 541, шины 542, входного порта 55 и выходного порта 56. Таким образом, осуществляется взаимный обмен различными управляющими данными и командами между блоком 3l расчета движущих сил, блоком 32 определения управляющих воздействий и блоком 33 управления движущими силами устройства 30 управления динамикой транспортного средства. Устройство 30 управления динамикой транспортного средства центрального процессора ЦПУ 50р и запоминающее устройство 50m для данных соединены друг с другом с помощью шины 543. Следовательно, устройство 30 управления динамикой транспортного средства может получать рабочие управляющие данные приводного устройства 100 транспортного средства с электронного управляющего устройства ECU 50 и использовать полученные данные. Кроме того, устройство 30 управления динамикой транспортного средства может вызвать выдачу устройством управления динамикой транспортного средства управляющего воздействия в соответствии с первым предпочтительным примером осуществления настоящего изобретения в виде прерывания во время выполнения электронным управляющим устройством ECU 50 рабочей программы управления.
[0063] Входной интерфейс 57 подключен к входному порту 55. К входному интерфейсу 57 подключены различные датчики и измерительные преобразователи, в состав которых входят переднее левое решающее устройство 40l, переднее правое решающее устройство 40r, заднее левое решающее устройство 41l, заднее правое решающее устройство 41r, датчик 42 силы нажатия педали газа, датчик 43 угла поворота управляемых колес, датчик 44 скорости транспортного средства, датчик 45 продольного ускорения, датчик 46 бокового ускорения и прочие датчики, предназначенные для получения информации, необходимой для работы приводного устройства 100 транспортного средства. Выходы указанных датчиков и измерительных преобразователей преобразуются аналого-цифровым преобразователем 57а и цифровым входным буфером 57d в сигналы, которые центральный процессор ЦП 50р может обработать, причем преобразованные сигналы затем передаются на входной порт 55. Таким образом, центральный процессор ЦП 50р получает информацию, необходимую для оперативного управления приводным устройством 100 транспортного средства и для управления динамикой транспортного средства в соответствии с первым предпочтительным примером осуществления настоящего изобретения.
[0064] Выходной интерфейс 58 подключен к выходному порту 56. К выходному интерфейсу 58 подключен объект управления устройства управления динамикой транспортного средства. В соответствии с первым предпочтительным примером осуществления настоящего изобретения объект управления устройства управления динамикой транспортного средства представляет собой инверторное устройство 6, которое управляет передним левым электродвигателем 10l, передним правым электродвигателем 10r, задним левым электродвигателем 11l и задним правым электродвигателем 11r. Выходной интерфейс 58 содержит схемы управления 581, 582, а объекты управления функционируют в соответствии с сигналами управления, вычисляемыми центральным процессором ЦП 50р. В соответствии со структурой центрального процессора ЦП 50р электронное управляющее устройство ECU 50 регулирует движущие силы переднего левого электродвигателя 10l, переднего правого электродвигателя 10r, заднего левого электродвигателя 11l и заднего правого электродвигателя 11r в зависимости от выходных сигналов с датчиков и измерительных преобразователей, описанных выше.
[0065] В запоминающем устройстве 50m для данных хранятся компьютерные программы, в том числе команды для процессов управления динамикой транспортного средства первого предпочтительного примера осуществления настоящего изобретения, таблицы управления и данные, касающиеся коэффициентов распределения движущих сил и используемые в системе управления динамикой транспортного средства первого предпочтительного примера осуществления настоящего изобретения. В качестве запоминающего устройства 50m для данных может использоваться, например, энергозависимая память (например, ОЗУ (RAM - Random Access Memory - оперативное запоминающее устройство)), энергонезависимая память (например, флэш-память) или их сочетание.
[0066] Вышеупомянутые компьютерные программы могут быть программами, которые используются в сочетании с компьютерными программами, хранящимися в центральном процессоре ЦП 50р для выполнения процессов управления в устройстве управления динамикой транспортного средства первого предпочтительного примера осуществления настоящего изобретения. Кроме того, блок 3l расчета движущих сил, блок 32 определения управляющих воздействий и блок 33 управления движущимися силами могут быть реализованы в виде аппаратных секций или компонентов устройства 30 управления динамикой транспортных средств, а не в виде компьютерных программ. Далее будет описано устройство управления динамикой транспортного средства первого предпочтительного примера осуществления настоящего изобретения. В последующем описании по мере необходимости следует обращаться также к фиг.1-6.
[0067] На фиг.7 и 8 представлены блок-схемы алгоритмов, на которых описана процедура управления транспортным средством в соответствии с первым предпочтительным примером осуществления настоящего изобретения. При выполнении управления динамикой транспортного средства первого предпочтительного примера осуществления настоящего изобретения устройство 30 управления динамикой транспортного средства позволяет получить целевой поворачивающий момент Mzref, целевой момент Mxref крена и коэффициент i распределения движущих сил на передних и задних колесах (шаг 101). Целевой поворачивающий момент Mzref получают путем умножения значения целевой скорости поворота γref из выражения (6) на момент инерции поворота Iz, а целевой момент крена Mxref получают путем умножения целевой скорости крена ϕref из выражения (7) на момент Ix инерции крена.
[0068] Как очевидно из выражений (6) и (7), целевая угловая скорость поворота γref и целевая угловая скорость крена ϕref могут быть получены путем использования в качестве параметров управления скорости V транспортного средства 1 и угла поворота θ управляемых колес (передних колес) транспортного средства 1. Скорость V транспортного средства 1 определяется датчиком 44 скорости транспортного средства, а угол поворота θ управляемых колес определяется датчиком 43 угла поворота управляемых колес.
[0069] В выражениях (6) и (7) «V» представляет скорость транспортного средства, «Кϕ» представляет устойчивость транспортного средства по крену, «hs» обозначает расстояние от оси крена транспортного средства до центра тяжести транспортного средства, «g» представляет ускорение силы тяжести, «n» представляет передаточное число рулевого механизма, «γ» представляет угловую скорость поворота вокруг вертикальной оси, «ϕ» представляет угол крена, «Kf» представляет коэффициент сопротивления шин передних колес боковому уводу, «Kr» представляет коэффициент сопротивления шин задних колес боковому уводу, «kf» - коэффициент устойчивости транспортного средства, «Ms» представляет подрессоренную массу транспортного средства, «θ» представляет угол поворота управляемых колес транспортного средства, a «Ixz» представляет момент инерции поворота/крена.

[0072] Далее будет описан способ получения целевой угловой скорости крена ϕref'. Если на вход подаются угловая скорость γ поворота и угол β бокового увода колеса транспортного средства 1 (далее «угол β увода корпуса транспортного средства»), характеристика ϕ(S) угла ϕ крена описывается выражением (8). Gϕ(0) описывается выражением (9), ξϕ описывается выражением (10), ωϕ описывается выражением (11) и Tϕ описывается выражением (12).




[0078] Если на вход подается угол поворота θ управляемых колес (передних колес) (далее «угол поворота θ»), характеристика γ(S) угловой скорости поворота γ описывается выражением (13), а характеристика β(S) угла увода β корпуса транспортного средства описывается выражением (14). Gγ(0) описывается выражением (15), Gβ(0) описывается выражением (16), ξ описывается выражением (17), и ω описывается выражением (18). Если переформулировать выражение (8), используя выражения с (9) по (18), характеристика ϕ(S) угла крена ϕ будет описываться выражением (19).

[0086] Зависимость угла крена ϕ от входного угла поворота θ может определяться выражением (19). Здесь целевой угол крена ϕref определяется как значение, получаемое умножением коэффициента пропорциональности управления Gγ(0) Gθ(0) на угол поворота θ. То есть целевой угол крена ϕref описывается выражением (20). Как видно из выражения (20), целевой угол крена ϕref можно получить из передаточной функции для входного значения угла поворота θ без факторизации в задержках.

[0088] Значение целевой угловой скорости крена получают путем дифференцирования целевого угла крена ϕref. В частности, в выражении (21) значение целевой угловой скорости крена ϕref' получают путем дифференцирования входного угла поворота θ с использованием коэффициента пропорциональности управления Gϕ(0) и Gγ(0) в качестве константы. Затем, если Gϕ(0) в выражении (21) заменить выражением (9), а Gγ(0) в выражении (21) заменить выражением (15), то получим целевую угловую скорость крена ϕref' из выражения (7).

[0090] Блок 32 определения управляющего воздействия устройства 30 управления динамикой транспортного средства получает коэффициент i распределения движущих сил на передних и задних колесах, вычисленный блоком 31 расчета движущей силы, и применяет ее к матрице А выражения (2) для определения, имеет ли решение система уравнений (1) (шаг 102). То есть если ранг (А)=4, то система уравнений (1) имеет решение. Если система уравнений (1) имеет решение (шаг 102: ДА), то можно достичь значений и целевого поворачивающего момента Mzref, и целевого момента крена Mxref.
[0091] В этом случае блок 31 расчета движущих сил получает суммарную движущую силу F для транспортного средства 1 и определяет движущие силы Ffl, Ffr, Frl и Frr для соответствующих ведущих колес путем применения целевого поворачивающего момента Mzref, целевого момента крена Mxref и коэффициента i распределения движущих сил на передних и задних колесах, полученного на шаге 10l, а также суммарной движущей силы F к выражению (3). Затем блок 33 управления движущими силами устройства 30 управления динамикой транспортного средства управляет выходами переднего левого электродвигателя 10l, переднего правого электродвигателя 10r, заднего левого электродвигателя 11l и заднего правого электродвигателя 11r так, чтобы на соответствующих ведущих колесах транспортного средства 1 были созданы определенные движущие силы Ffl, Ffr, Frl и Frr. Далее блок 33 управления движущими силами приводит в движение передний левый электродвигатель 10l, передний правый электродвигатель 10r, задний левый электродвигатель 11l и задний правый электродвигатель 11r так, чтобы получить заданные выходные показатели. В этом случае производится одновременное управление поворотом и креном транспортного средства 1 (шаг 103) так, что достигается необходимое водителю управление поворотом транспортного средства 1 и при этом предотвращается крен транспортного средства. Заметим, что суммарную движущую силу F транспортного средства 1 можно определить в зависимости от величины электропитания, подаваемого на соответствующие электродвигатели транспортного средства 1.
[0092] В то же время если на шаге 102 определяется, что система уравнений (1) не имеет решения (шаг 102: НЕТ), то есть если ранг (А) ≠ 4, то невозможно одновременно достичь значений и целевого поворачивающего момента Mzref, и целевого момента крена Mxref. Однако в этом случае управление осуществляется так, чтобы достичь значений или целевого поворачивающего момента Mzref, или целевого момента крена Mxref. Далее управление с целью достижения значения целевого поворачивающего момента Mzref будет называться «управлением поворотом», а управление с целью достижения значения целевого момента крена будет называться «управлением креном».
[0093] В данном предпочтительном примере осуществления настоящего изобретения, когда невозможно достичь значений и целевого поворачивающего момента Mzref, и целевого момента крена Mxref, управление осуществляется с целью достижения значения целевого момента крена Mxref таким образом, чтобы предотвращался крен транспортного средства 1. В то же время если поворачивающий момент транспортного средства 1, возникающий из-за движущих сил на соответствующих ведущих колесах, которые следует создать, чтобы достичь значения целевого момента крена Mxref с целью управления креном транспортного средства 1, по расчетам больше, чем верхнее предельное значение Mz_max поворачивающего момента (предельное значение поворачивающего момента), то транспортное средство 1 очень склонно к неконтролируемому повороту вокруг вертикальной оси. Чтобы справиться с этим, когда Mxz>Mz_max, приоритет отдается достижению целевого поворачивающего момента Mzref с целью стабилизации поведения транспортного средства 1.
[0094] Если система уравнений (1) не имеет решения (шаг 102: НЕТ), то блок 31 расчета движущих сил определяет путем решения уравнения (4) движущие силы Ffl, Ffr, Frl и Frr, которые необходимо приложить к соответствующим колесам, чтобы достичь значения целевого момента крена Mxref. Далее блок 32 определения управляющих воздействий определяет поворачивающий момент Mxz, возникающий в транспортном средстве 1, благодаря движущим силам Ffl, Ffr, Frl и Frr для соответствующих ведущих колес, которые были определены блоком 31 расчета движущих сил, и затем сравнивает поворачивающий момент Mxz с верхним предельным значением поворачивающего момента Mz_max (шаг 104).
[0095] Если Mxz>Mzmax (шаг 104: ДА), транспортное средство 1 очень склонно к неконтролируемому повороту вокруг вертикальной оси. Таким образом, блок 32 определения управляющих воздействий определяет, что необходимо выполнить управление таким образом, чтобы достичь значений целевого поворачивающего момента Mzref, но не целевого момента крена Mxref. В ответ на эту операцию определения блок 31 расчета движущих сил определяет путем решения уравнения (5) движущие силы Ffl, Ffr, Frl и Frr, которые необходимо приложить к соответствующим колесам, чтобы достичь значений целевого поворачивающего момента Mzref. Далее блок 33 управления движущими силами управляет передним левым электродвигателем 10l, передним правым электродвигателем 10r, задним левым электродвигателем 11l и задним правым электродвигателем 11r так, чтобы на соответствующих ведущих колесах транспортного средства 1 были созданы определенные движущие силы Ffl, Ffr, Frl и Frr. Следовательно, управление поворотом транспортного средства 1 (шаг 105) производится таким образом, чтобы исключить возможность неконтролируемого поворота транспортного средства 1 вокруг вертикальной оси и благодаря этому обеспечить поворот транспортного средства в контролируемом режиме.
[0096] В то же время, если Mxz>Mzmax (шаг 104: НЕТ), то определяется, выполнять ли управление креном или управление поворотом (шаг 106). В то же время операция определения производится с учетом состояния приводного устройства транспортного средства 1. Далее будут даны дополнительные сведения со ссылкой на фиг.8. Состояние приводного устройства транспортного средства 1 определяется исходя из угла поворота θ управляемых колес и состояния выполнения операции рулевого управления. Благодаря этому обеспечивается движение и соответствующее положение транспортного средства 1, управление которым осуществляется в соответствии с намерениями водителя транспортного средства 1.
[0097] Блок 32 определения управляющих воздействий получает угол поворота θ управляемых колес от датчика 43 угла поворота управляемых колес и определяет, находится ли значение угла поворота θ управляемых колес поблизости от нейтрального положения и выполняется ли операция рулевого управления (шаг 201). Что касается определения, находится ли значение угла поворота θ управляемых колес поблизости от нейтрального положения, например если значение угла поворота θ не больше порогового значения (например, ±5 или около того), то значение угла поворота θ определяется как находящееся поблизости от нейтрального положения. Что касается определения состояния выполнения операции рулевого управления, то, например, определяется, что операция управления выполняется, если значение производной по времени dθ/dt, полученное дифференцированием угла поворота θ по времени, не равно нулю (d≠dt≠0). Заметим, что значение производной угла поворота по времени dθ/dt представляет собой скорость изменения угла поворота.
[0098] Когда значение угла поворота θ находится поблизости от нейтрального положения и если выполняется операция управления (шаг 201: ДА), то выполняется операция управления креном (шаг 202). Таким образом, крен транспортного средства 1 предотвращается в области незначительных воздействий рулевого управления, то есть предотвращается крен транспортного средства, возникающий во время начальной фазы поворота, крен транспортного средства, возникающий при смене полосы движения, и т.п., и, следовательно, поведение транспортного средства 1 стабилизируется.
[0099] Если значение угла поворота θ не находится поблизости от нейтрального положения (то есть если значение угла поворота θ больше порогового значения) или если не выполняется операция рулевого управления (dθ/dt=0) (то есть угол поворота остается постоянным) (шаг 201: НЕТ), то выполняется операция управления поворотом (шаг 203). В таком случае достигается заданное значение прироста угла поворота по отношению к углу поворота θ. В таком случае транспортное средство поворачивает в режиме, отражающем намерения водителя, когда он поворачивает управляемые колеса на большой угол поворота θ.
[0100] В случае, когда с использованием операций определения, описанных выше, производится переключение между режимами управления креном и управления поворотом и если переключение между режимами управления креном и управления поворотом производится прерывисто, это может ухудшить управляемость и стабильность транспортного средства 1. Чтобы этого избежать, в данном предпочтительном примере осуществления настоящего изобретения движущая сила каждого ведущего колеса умножается на весовой коэффициент таким образом, что переключение между режимами управления креном и управления поворотом производится непрерывно. Весовой коэффициент Y - это коэффициент, предназначенный для определения коэффициента управления поворотом, он изменяется в диапазоне от 0 до 1. После определения весового коэффициента Y коэффициент управления креном можно определить как (1-Y).
[010l] На фиг.9 представлен один пример таблицы весовых коэффициентов, в которой приведены значения весового коэффициента Y. Таблица 70 весовых коэффициентов хранится в запоминающем устройстве 50m для данных электронного управляющего устройства ECU 50. В таблице 70 весовых коэффициентов приведены значения весового коэффициента Y, которые определены в зависимости от угла поворота θ и переходного состояния операции рулевого управления (то есть значения производной угла поворота θ по времени dθ/dt). Заметим, что здесь В0(=0)<B1<В2<В3<В4<В5 и В0' (=0)<В1'<В2'<В3'<В4'<В5', а весовой коэффициент Y равен Y1(=0)<Y2<Y3<Y4(=1). To есть при увеличении угла поворота θ и приближении производной dθ/dt=θ к нулю коэффициент управления поворотом увеличивается.
[0102] Движущая сила для каждого ведущего колеса определяется с использованием весового коэффициента следующим способом. Например, при определении движущей силы Ffl для переднего левого колеса движущая сила, необходимая для создания целевого момента крена (эту движущую силу получают решением уравнения (4)), обозначается как «Ffl_r», а движущая сила, необходимая для создания целевого поворачивающего момента (эту движущую силу получают решением уравнения (5)), обозначается как «Ffl_y».
[0103] Когда движущая сила Ffl описывается с использованием весового фактора Y, то получаем Ffl=(1-Y) × Ffl_r+Y × Ffl_y. Это же применимо и при определении движущих сил Ffr, Fir, Frr для других ведущих колес. В данном случае происходит непрерывное переключение между режимами управления креном и управления поворотом, что уменьшает возможность ухудшения управляемости и стабильности поведения транспортного средства.
[0104] После определения, следует ли выполнять управление креном или поворотом (шаг 202 или шаг 203), блок 3l расчета движущей силы получает значение θ угла поворота и значение θ' его производной по времени (=dθ/dt) и применяет их к таблице 70 весовых коэффициентов (шаг 204). Затем блок 31 расчета движущей силы получает значение весового коэффициента Y, соответствующее углу поворота θ, и значение его производной по времени θ' (шаг 205) и вычисляет движущую силу для каждого ведущего колеса, используя весовой коэффициент Y (шаг 206).
[0105] На шаге 106 определяется, выполнять ли управление креном или управление поворотом с использованием операций шагов с 201 по 206, описанных выше. При выполнении управлением креном (шаг 106): ДА, шаг 201: ДА) блок 33 управления движущими силами управляет передним левым электродвигателем 10l, передним правым электродвигателем 10r, задним левым электродвигателем 11l и задним правым электродвигателем 11r так, чтобы на соответствующих ведущих колесах транспортного средства 1 были созданы (шаг 107) движущие силы Ffl, Ffr, Frl и Frr, определенные на шагах с 204 по 206. В то же время при выполнении управления поворотом (шаг 106: НЕТ, шаг 201: НЕТ) блок 33 управления движущими силами управляет передним левым электродвигателем 10l, передним правым электродвигателем 10r, задним левым электродвигателем 11l и задним правым электродвигателем 11r так, чтобы на соответствующих ведущих колесах транспортного средства 1 были созданы (шаг 108) движущие силы Ffl, Ffr, Frl и Frr, определенные на шагах с 204 по 206.
[0106] Как упоминалось выше, в первом предпочтительном примере осуществления настоящего изобретения движущие силы для левого и правого ведущих колес определяются в зависимости от суммарной движущей силы, необходимой для ведущих колес, сил противодействия движущим силам на ведущих колесах, и, по меньшей мере, двух из следующих целевых моментов: целевого момента в направлении поворота транспортного средства в горизонтальной плоскости, целевого момента в направлении поперечного наклона транспортного средства и целевого момента в направлении продольного наклона транспортного средства. Далее, движущие силы на соответствующих ведущих колесах регулируются так, чтобы достичь значений, по меньшей мере, двух из следующих целевых моментов: целевого поворачивающего момента, целевого момента крена и целевого момента наклона. В таком случае можно достигнуть эксплуатационных показателей, необходимых водителю, благодаря чему соответственно улучшается управляемость транспортного средства. В частности, в случае выполнения управления с целью достижения одновременно целевых значений поворачивающего момента и момента крена, например как в случае описанного выше первого предпочтительного примера осуществления настоящего изобретения, можно достичь необходимых водителю показателей движения транспортного средства на повороте и при этом предотвратить крен транспортного средства. Здесь следует заметить, что любое устройство, имеющее такую же структуру, как та, что применяется в первом предпочтительном примере осуществления настоящего изобретения и в примере его модификации, обеспечивают преимущества и имеют эффект такие же или подобные тем, что достижимы в первом предпочтительном примере осуществления настоящего изобретения и в примере его модификации. Кроме того, если это применимо, структура первого предпочтительного примера осуществления настоящего изобретения может быть применена также в виде, описанном ниже.
[0107] Второй предпочтительный пример осуществления настоящего изобретения является таким же, как и первый, за исключением того, что дополнительно к управлению углом поворота и углом крена производится управление углом наклона в продольной плоскости. Принцип управления динамикой транспортного средства второго предпочтительного примера осуществления настоящего изобретения является тем же самым, что и в первом предпочтительном примере осуществления настоящего изобретения. Таким образом, управление динамикой транспортного средства второго предпочтительного примера осуществления настоящего изобретения будет описано как управление, осуществляемое в транспортном средстве 1, содержащем приводное устройство транспортного средства 100 первого предпочтительного примера осуществления настоящего изобретения. Сначала будет дано описание способа определения движущих сил для соответствующих ведущих колес при управлении динамикой транспортного средства второго предпочтительного примера осуществления настоящего изобретения.
[0108] При управлении динамикой транспортного средства второго предпочтительного примера осуществления настоящего изобретения управление поворотом (поворотом вокруг оси Z), креном (поворотом вокруг оси X) и наклоном в продольной плоскости (поворотом вокруг оси Y) транспортного средства 1 производится путем управления движущими силами для соответствующих ведущих колес транспортного средства 1. Если момент инерции наклона обозначить как «Ip», целевую угловую скорость наклона обозначить как «P_ref», нагрузку на передние колеса (нагрузку на переднее левое колесо 2l и переднее правое колесо 2r) обозначить как «Wf», нагрузку на задние колеса (нагрузку на заднее левое колесо 3l и заднее правое колесо 3r) обозначить как «Wr», статическую нагрузку на передние колеса (статическую нагрузку на переднее левое колесо 2l и переднее правое колесо 2r) обозначить как "Wf0", статическую нагрузку на задние колеса (статическую нагрузку на заднее левое колесо 3l и заднее правое колесо 3r) обозначить как «Wr0», уравнения движения наклона транспортного средства можно описать, например, в виде выражений (22)-(24). Заметим, что произведение момента инерции наклона Ip и целевой угловой скорости наклона P_ref представляет собой целевой момент наклона Myref.
[0109] В этих выражениях «Ffl» представляет силу противодействия движущим силам на передних колесах и равна сумме силы противодействия движущей силе на переднем левом колесе Ffl × tanαfl и силы противодействия движущей силе на переднем правом колесе Ffr × tanαfr. Аналогичным образом «Frl» представляет силу противодействия движущим силам на задних колесах и равна сумме силы противодействия движущей силе на заднем левом колесе Frl × tanαrl и силы противодействия движущей силе на заднем правом колесе Frr × tanαrr. При преобразовании выражений с (22) по (24) в одиночное выражение получаем выражение (27). Заметим, что член Ip × P_ref левой стороны выражения (27) представляет целевой момент наклона Myref.
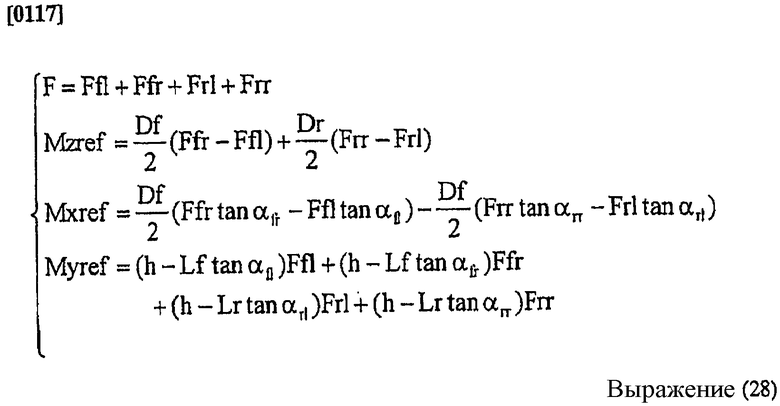
[0116] В систему уравнений (28) входят целевой поворачивающий момент Mzref, который необходим для управления движущими силами для соответствующих ведущих колес и поворота транспортного средства, целевой момент крена Mxref, который необходим для управления силами противодействия движущим силам на соответствующих ведущих колесах, и контроля крена транспортного средства, суммарная движущая сила F и целевой момент наклона Myref, что может быть выражено как отношение между силами противодействия движущим силам на соответствующих ведущих колесах. То есть решение системы уравнений (28) определяет движущие силы Ffl, Ffr, Frl и Frr для соответствующих колес, которые необходимы, чтобы достичь значений целевого поворачивающего момента Mzref, целевого момента наклона и целевого момента крена Mxref.
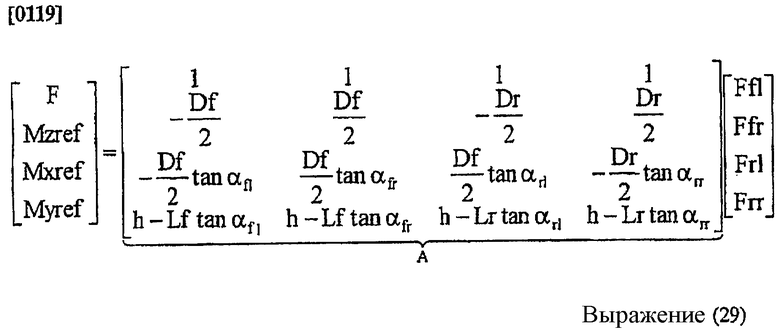
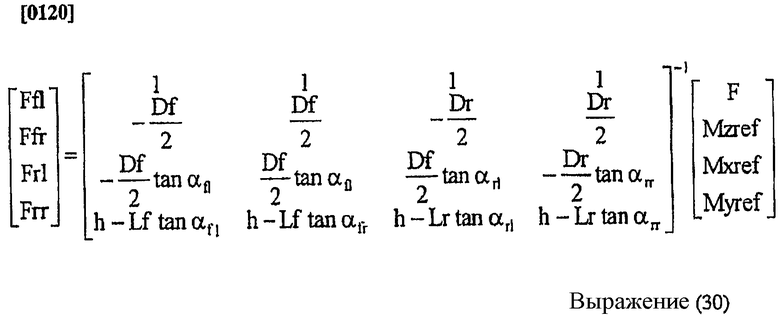
[0118] Выражение (29) описывает систему уравнений (28) в матричном виде. Если первую матрицу с правой стороны выражения (29) обозначить как А и если ранг матрицы (А) равен 4, то матрица А является регулярной и, следовательно, система уравнений (29) имеет решение. В этом случае движущие силы Ffl, Ffr, Frl и Frr, необходимые для достижения значений целевого поворачивающего момента Mzref, целевого момента крена Mxref и целевого момента наклона Myref, можно определить путем умножения каждой стороны выражения (29) на А-1, которая является обратной матрицей по отношению к матрице А из левой стороны выражения (30). Далее будет описано устройство управления динамикой транспортного средства второго предпочтительного примера осуществления настоящего изобретения. Заметим, что управление динамикой транспортного средства второго предпочтительного примера осуществления настоящего изобретения может выполняться устройством управления динамикой транспортного средства первого предпочтительного примера осуществления настоящего изобретения (см. фиг.6). Таким образом, в последующем описании по мере необходимости следует обращаться также к фиг.1-6.
[0121] На фиг.10 представлен алгоритм процедуры управления транспортным средством второго предпочтительного примера осуществления настоящего изобретения. При выполнении управления динамикой транспортного средства второго предпочтительного примера осуществления настоящего изобретения устройство 30 управления динамикой транспортного средства позволяет получить целевой поворачивающий момент Mzref, целевой момент крена Mxref и целевой момент наклона Myref (шаг 301). Целевой момент наклона Myref получают перемножением момента инерции наклона 1р и целевой момент угловой скорости наклона P_ref, как описано выше, а целевая угловая скорость наклона P_ref описывается выражением (31). «P_ref_tmp» в выражении (31) описывается выражением (32). Заметим, что выражение (31) описано в домене S. Символ (S), приписанный к целевой угловой скорости поворота P_ref вокруг поперечной оси с левой стороны, указывает, что выражение (31) описано в домене S. Следовательно, целевую угловую скорость поворота P_ref вокруг поперечной оси во временном домене можно получить посредством преобразования выражения (31) в выражение во временном домене.
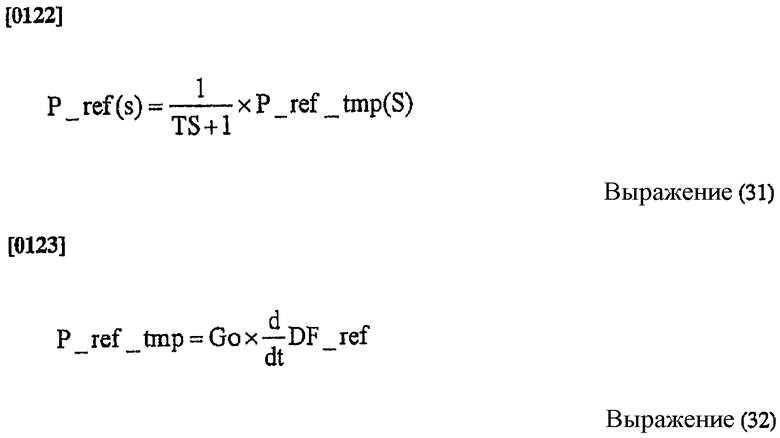
[0124] В приведенных выше выражениях символ «Go» отражает приращение угла наклона в продольной плоскости, полученное эмпирическим путем, «DF_ref» представляет движущую силу, требуемую водителем, a «S» является оператором Лапласа. Благодаря дифференциальным элементам выражение (32) обеспечивается высокое приращение движущей силы в ответ на резкое нажатие педали газа, а это приводит к большому изменению продольного ускорения и затрудняет стабилизацию транспортного средства при сохранении требуемой управляемости. Следовательно, чтобы получить выражение (31), к выражению (32) в качестве предварительного фильтра добавляется апериодическое звено первого порядка, а целевую угловую скорость наклона получают с помощью выражения (31) так, чтобы можно было нейтрализовать управление динамикой транспортного средства 1 при сохранении требуемой управляемости.
[0125] Блок 32 определения управляющих воздействий устройства 30 управления динамикой транспортного средства определяет, имеет ли решение система уравнений (28) (шаг 302): то есть, если ранг (А)=4, то система уравнений (28) имеет решение. Если система уравнений (28) имеет решение (шаг 302: ДА), то можно достигнуть требуемых значений целевого поворачивающего момента Mzref, целевого момента крена Mxref и целевого момента наклона Myref.
[0126] В этом случае блок 31 расчета движущих сил получает суммарную движущую силу F для транспортного средства 1 и определяет движущие силы Ffl, Ffr, Frl и Frr для соответствующих ведущих колес путем применения целевого поворачивающего момента Mzref, целевого момента крена Mxref и целевого момента наклона Myref, которые получены на шаге S3 01, а также суммарной движущей силы F к выражению (30). Затем блок 33 управления движущими силами устройства 30 управления динамикой транспортного средства управляет передним левым электродвигателем 10l, передним правым электродвигателем 10r, задним левым электродвигателем 11l и задним правым электродвигателем 11r так, чтобы на соответствующих ведущих колесах были созданы движущие силы Ffl, Ffr, Frl и Frr. В данном случае управление поворотом и креном транспортного средства осуществляется одновременно (шаг 303). Заметим, что «управление (продольным) наклоном» представляет собой управление движущими силами для соответствующих ведущих колес транспортного средства 1 с целью достижения значений целевого момента наклона Myref.
[0127] В то же время, если система уравнений (28) не имеет решения (шаг 302: НЕТ), то есть если ранг (А) ≠ 4, то невозможно одновременно достичь значений целевого поворачивающего момента Mzref, целевого момента крена Mxref и целевого момента наклона Myref. В этом случае, чтобы достичь значений, по меньшей мере, одного из следующих целевых моментов: целевого поворачивающего момента Mzref, целевого момента крена Mxref или целевого момента наклона Myref, выполняется переключение режима управления (шаг 304).
[0128] После переключения режима управления, чтобы достичь значений, по меньшей мере, одного из следующих моментов: целевого поворачивающего момента Mzref, целевого момента крена Mxref или целевого момента наклона Myref, блок 3l расчета движущих сил определяет коэффициент i (шаг 305). Далее блок 32 определения управляющих воздействий устройства 30 управления динамикой транспортного средства получает коэффициент i распределения движущих сил на передних и задних колесах от блока 31 расчета движущей силы (шаг 305) и применяет ее к матрице А выражения (29) для определения, имеет ли решение система уравнений (28) (шаг 306). Заметим, что процедуры шагов с 307 по 3l2 сходны с процедурами шагов с 103 по 108, и поэтому их описания будут опущены.
[0129] Как упоминалось выше, во втором предпочтительном примере осуществления настоящего изобретения движущие силы для левого и правого ведущих колес определяются на основании суммарной движущей силы для ведущих колес, сил противодействия движущим силам на ведущих колесах и, по меньшей мере, двух из следующих целевых моментов: целевого момента в направлении поворота транспортного средства в горизонтальной плоскости, целевого момента в направлении поперечного наклона транспортного средства, а также целевого момента в направлении продольного наклона транспортного средства, причем управление движущими силами для соответствующих ведущих колес производится так, чтобы одновременно достичь значений, по меньшей мере, двух из следующих целевых моментов: целевого поворачивающего момента, целевого момента крена и целевого момента наклона транспортного средства. В таком случае можно достичь эксплуатационных показателей, необходимых водителю, благодаря чему соответственно улучшается управляемость транспортного средства. Здесь следует заметить, что любое устройство, имеющее такую же структуру, как та, что применяется во втором предпочтительном примере осуществления настоящего изобретения, обеспечивает такие же или аналогичные преимущества и эффекты, что и устройство, описанное во втором предпочтительном примере осуществления настоящего изобретения.
[0130] Как описано выше, приводное устройство транспортного средства в соответствии с настоящим изобретением улучшает управляемость транспортного средства, снабженного трансмиссией, обеспечивающей разные движущие силы, по крайней мере, в паре, состоящей соответственно из левого и правого ведущих колес.
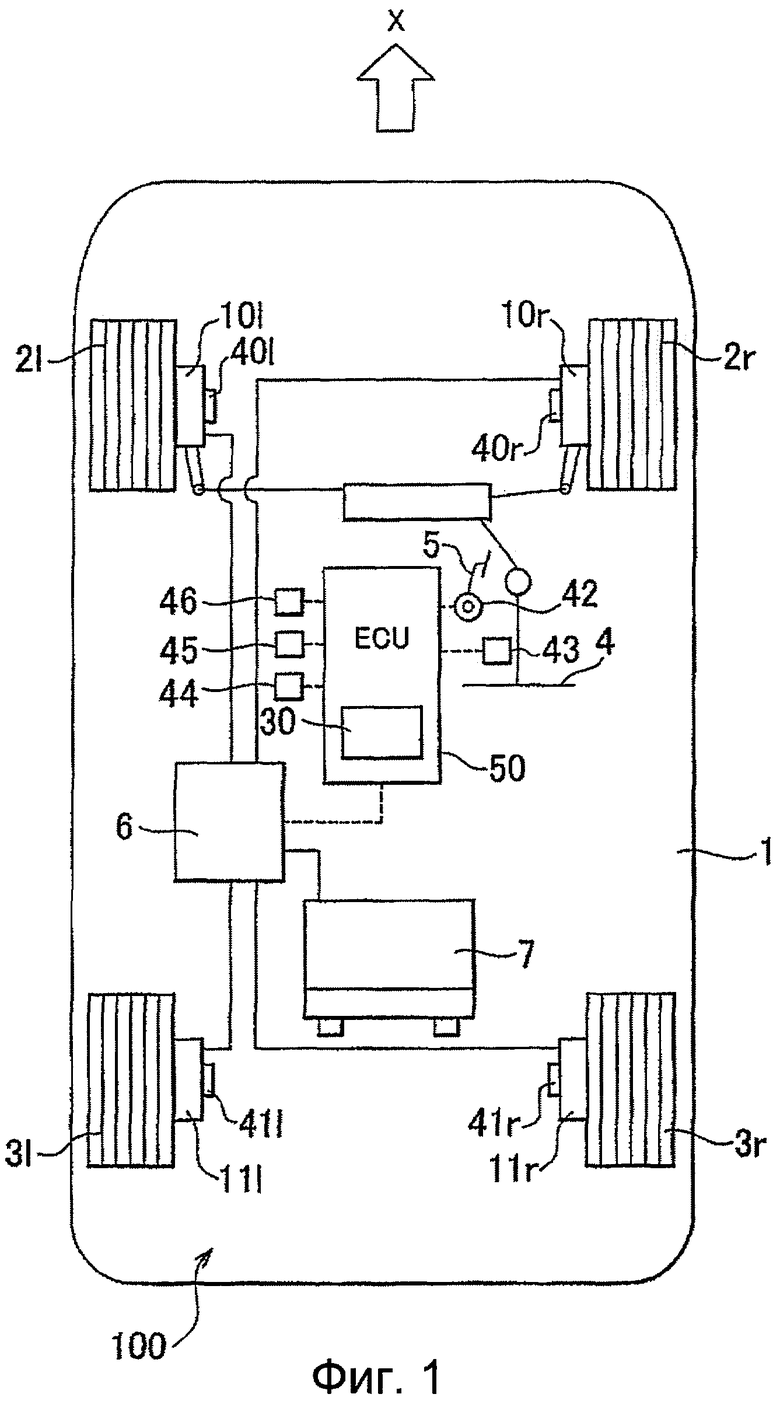
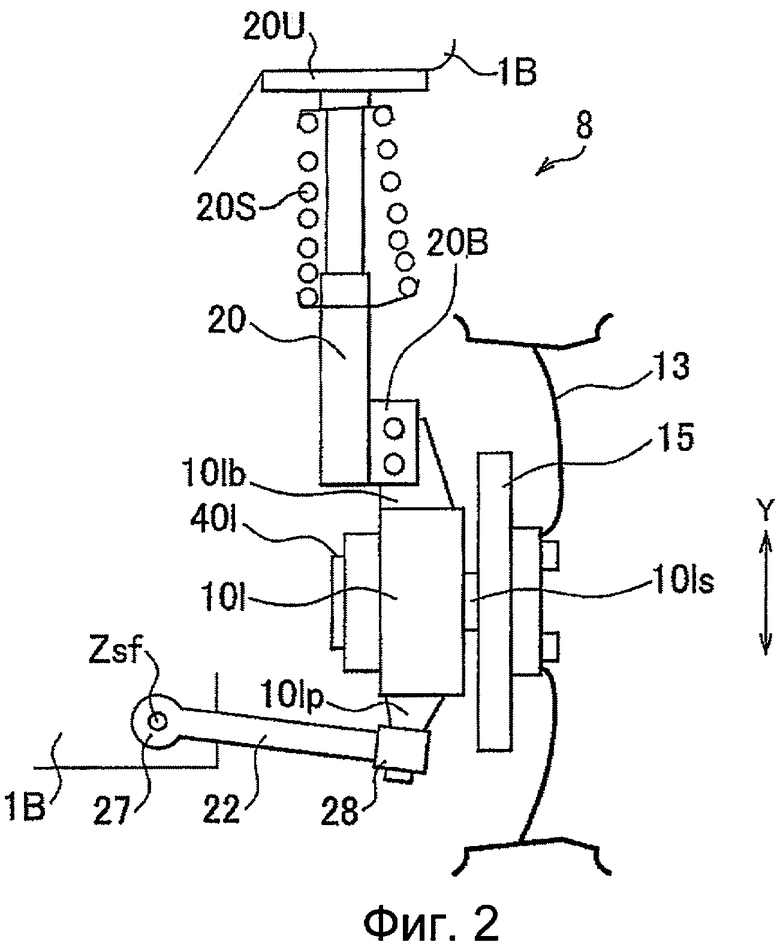
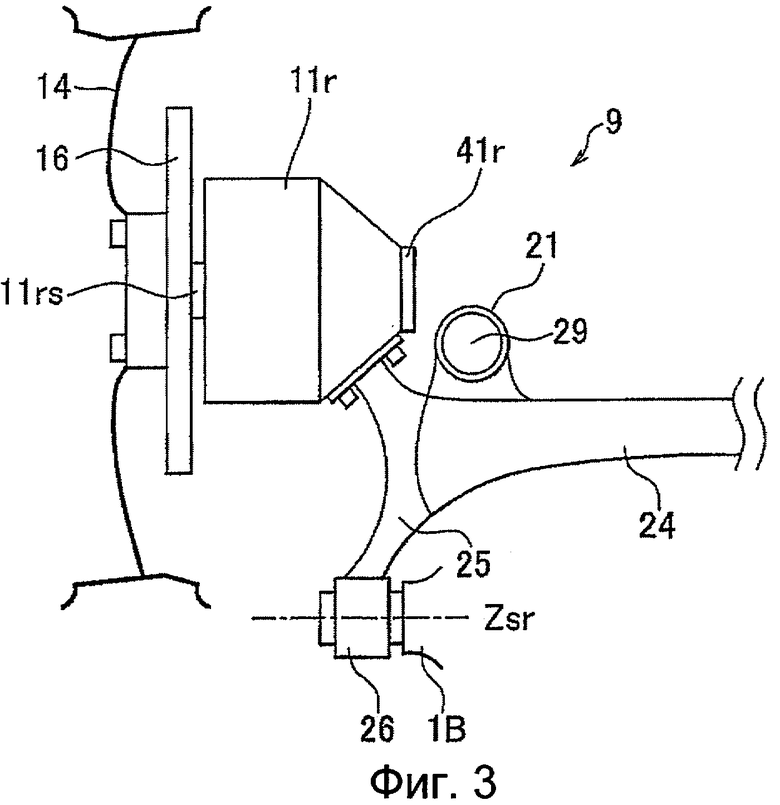
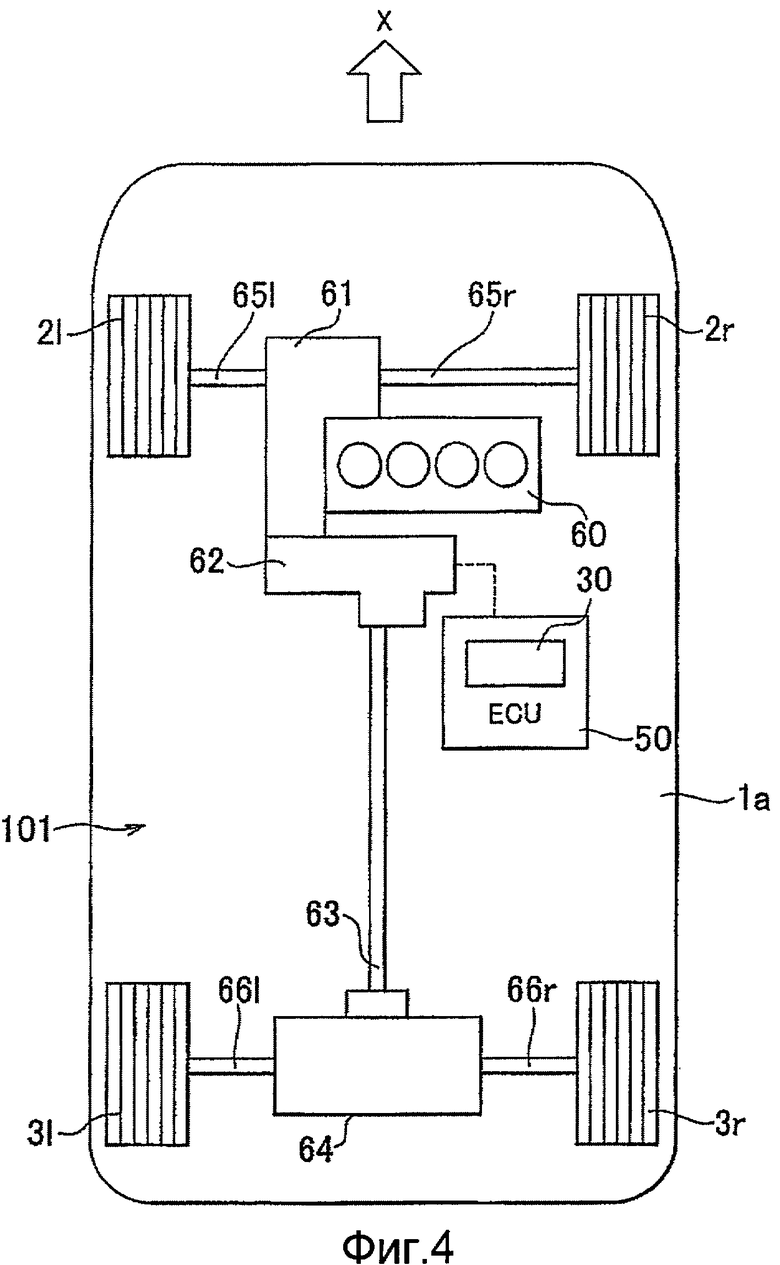
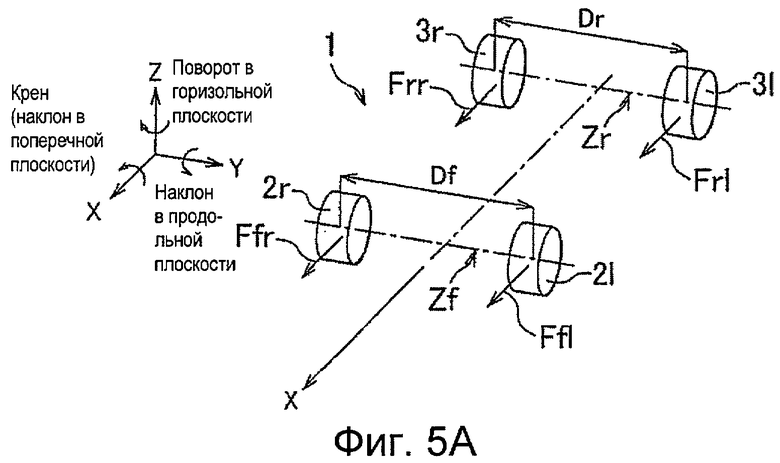
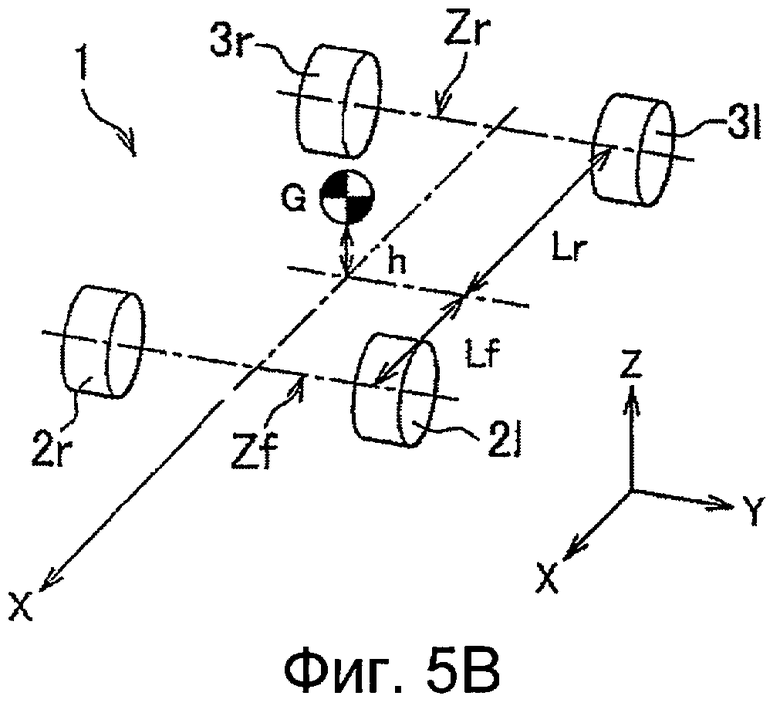
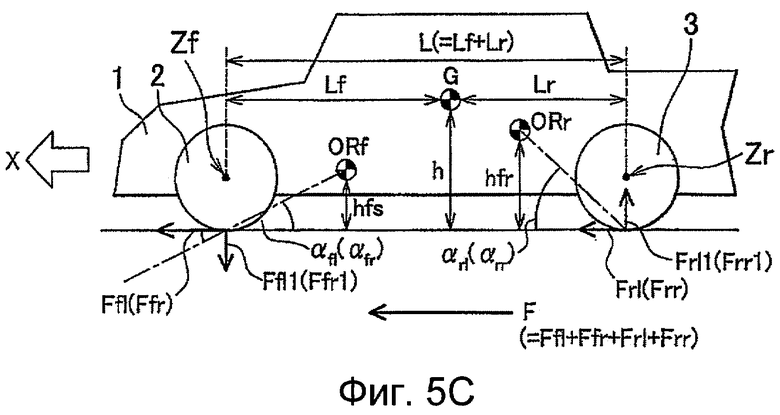
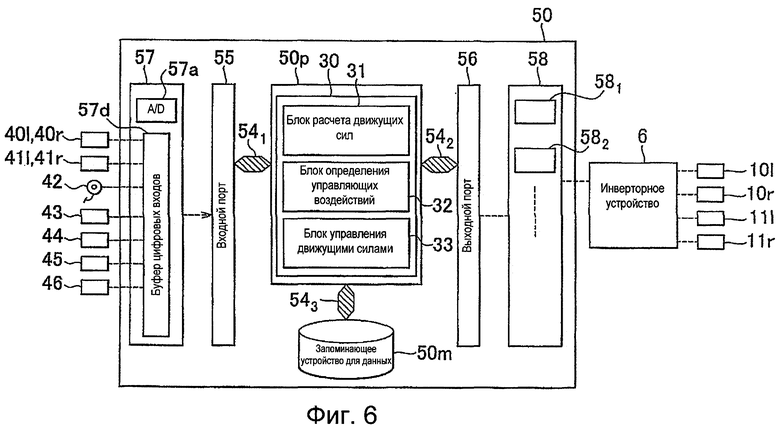
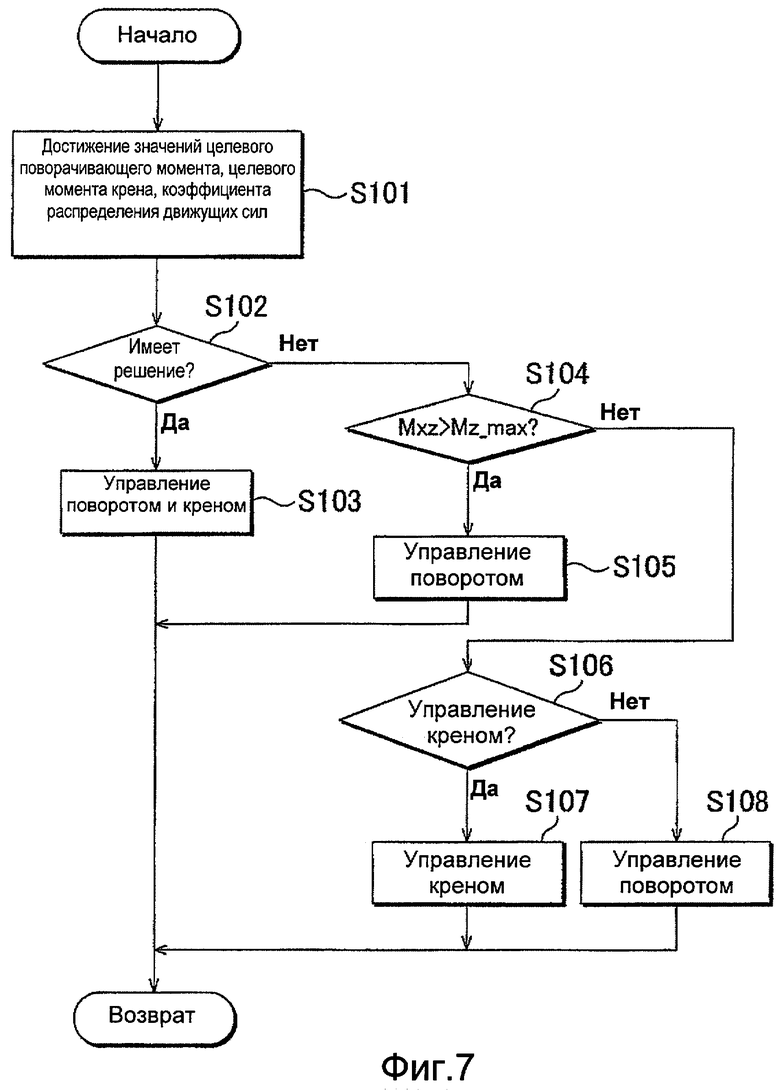
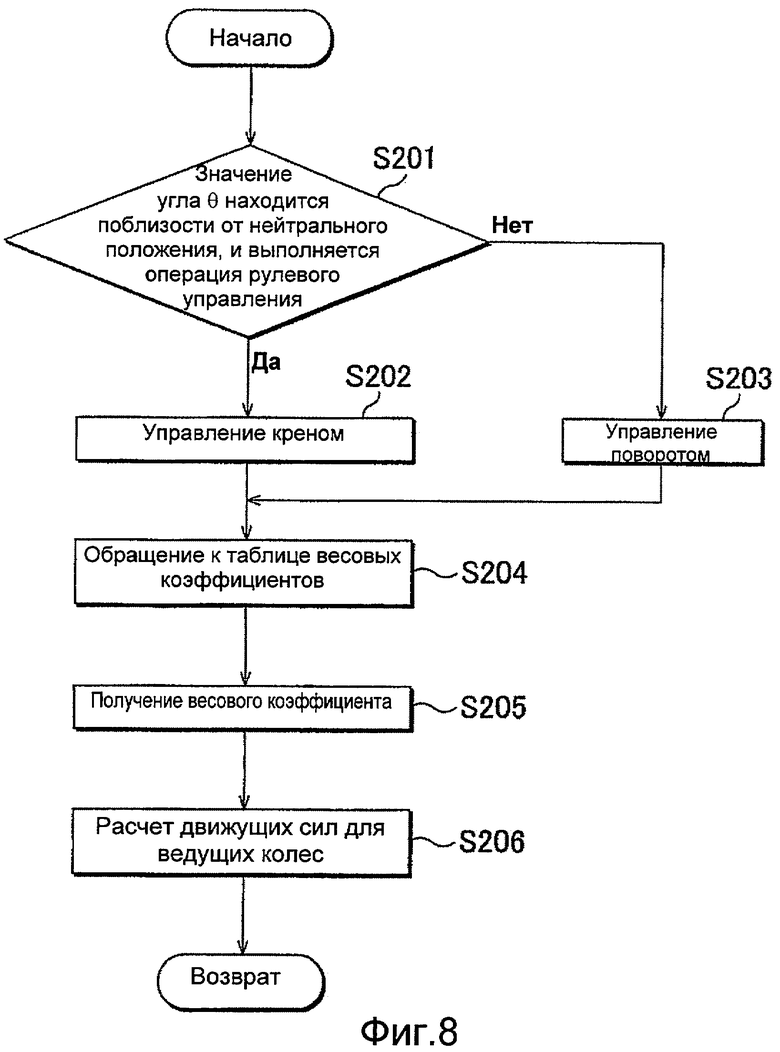
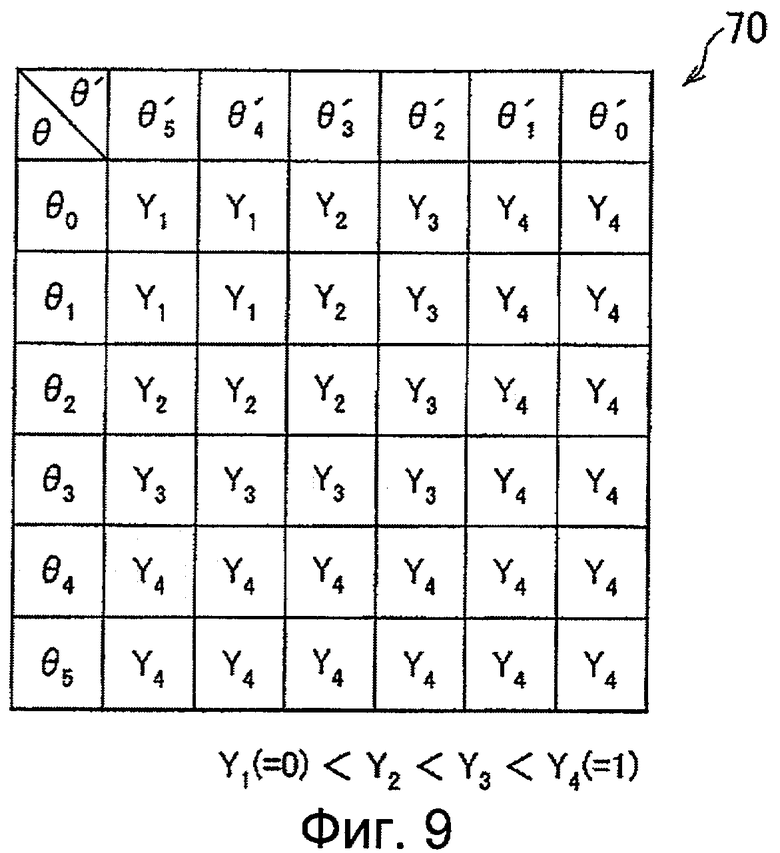
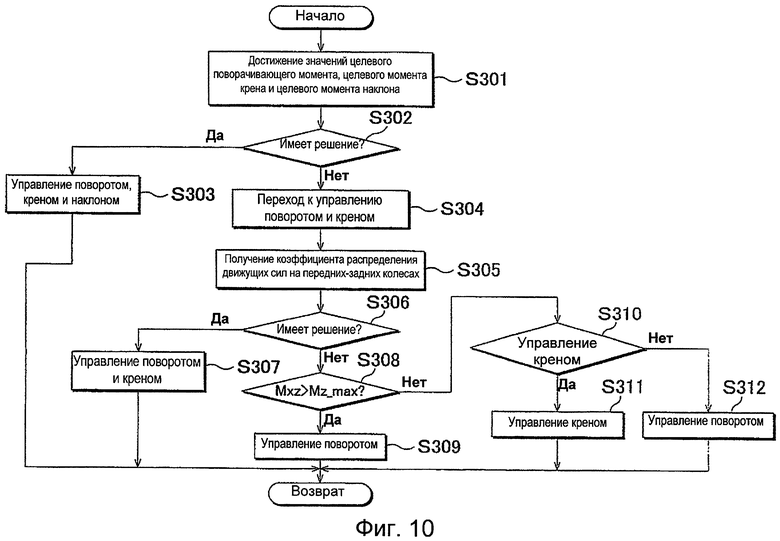
Изобретение относится к приводному устройству для транспортного средства. Приводное устройство содержит левое и правое ведущие колеса. Ведущие колеса приводятся в движение посредством движущих сил. Движущие силы определяются на основании суммарной движущей силы на передних и на задних колесах, сил противодействия движущим силам на ведущих колесах, соотношения целевого момента, требуемого в направлении поворота транспортного средства. Технический результат заключается в повышении дорожных качеств транспортного средства. 20 з.п. ф-лы, 12 ил.
1. Приводное устройство транспортного средства, которое может создавать различные движущие силы, по меньшей мере, в паре, состоящей, соответственно, из левого и правого ведущих колес, характеризующееся тем, что левое и правое ведущие колеса приводятся в движение посредством движущих сил, которые определяются на основании соотношения целевого момента, требуемого в направлении поворота транспортного средства в горизонтальной плоскости, и движущих сил ведущих колес, соотношения между целевым моментом, требуемым в направлении поперечного наклона транспортного средства, и сил противодействия движущим силам на ведущих колесах, суммарной движущей силы для ведущих колес и соотношения распределения суммарной движущей силы на передних и на задних колесах с тем, чтобы отвечать требованиям целевого момента, требуемого в направлении поворота транспортного средства в горизонтальной плоскости, и целевого момента, требуемого в направлении поперечного наклона транспортного средства.
2. Приводное устройство транспортного средства по п.1, характеризующееся тем, что движущие силы для левого и правого ведущих колес определяются на основании, по меньшей мере, двух из следующих соотношений: соотношения между целевым моментом в направлении поворота транспортного средства в горизонтальной плоскости и разностью между движущей силой для левого ведущего колеса и движущей силой для правого ведущего колеса, соотношения между целевым моментом в направлении поперечного наклона транспортного средства и разностью между силой противодействия движущей силе на левом ведущем колесе и силой противодействия движущей силе на правом ведущем колесе и соотношения между целевым моментом в направлении продольного наклона транспортного средства и силами противодействия движущим силам на левом и правом ведущих колесах.
3. Приводное устройство транспортного средства по п.2, характеризующееся тем, что движущие силы для левого и правого ведущих колес определяются с использованием целевого момента в направлении поворота транспортного средства в горизонтальной плоскости, целевого момента в направлении поперечного наклона транспортного средства и целевого момента в направлении продольного наклона транспортного средства.
4. Приводное устройство транспортного средства по п.3, характеризующееся тем, что, когда невозможно одновременно обеспечить целевой момент в направлении поворота транспортного средства в горизонтальной плоскости, целевой момент в направлении поперечного наклона транспортного средства и целевой момент в направлении продольного наклона транспортного средства, обеспечивается, по меньшей мере, целевой момент в направлении поворота транспортного средства в горизонтальной плоскости или целевой момент в направлении поперечного наклона транспортного средства.
5. Приводное устройство транспортного средства по п.2, характеризующееся тем, что движущие силы для левого и правого ведущих колес определяются с использованием целевого момента в направлении поворота транспортного средства в горизонтальной плоскости и целевого момента в направлении поперечного наклона транспортного средства.
6. Приводное устройство транспортного средства по любому из пп.3-5, характеризующееся тем, что когда невозможно одновременно обеспечить целевой момент в направлении поворота транспортного средства в горизонтальной плоскости и целевой момент в направлении поперечного наклона транспортного средства, если момент поворота транспортного средства в горизонтальной плоскости, который, по оценкам, возникнет в ответ на движущие силы, создаваемые на левом и правом ведущих колесах для регулирования крена транспортного средства, превышает предельный момент поворота транспортного средства в горизонтальной плоскости, то обеспечивается целевой момент в направлении поворота транспортного средства в горизонтальной плоскости.
7. Приводное устройство транспортного средства по любому из пп.3-5, характеризующееся тем, что, когда невозможно одновременно обеспечить целевой момент в направлении поворота транспортного средства в горизонтальной плоскости и целевой момент в направлении поперечного наклона транспортного средства, обеспечивается целевой момент в направлении поперечного наклона транспортного средства.
8. Приводное устройство транспортного средства по любому из пп.3-5, характеризующееся тем, что, когда невозможно одновременно обеспечить целевой момент в направлении поворота транспортного средства в горизонтальной плоскости и целевой момент в направлении поперечного наклона транспортного средства, обеспечивается целевой момент в направлении поворота транспортного средства в горизонтальной плоскости.
9. Приводное устройство транспортного средства по любому из пп.3-5, характеризующееся тем, что решение об обеспечении целевого момента в направлении поворота транспортного средства в горизонтальной плоскости или целевого момента в направлении поперечного наклона транспортного средства принимается на основании угла поворота управляемого колеса транспортного средства и скорости изменения указанного угла поворота.
10. Приводное устройство транспортного средства по п.9, характеризующееся тем, что принимается решение об обеспечении целевого момента в направлении поперечного наклона, если значение указанного угла поворота равно или меньше заданного порогового значения, а скорость изменения указанного угла поворота не равна нулю.
11. Приводное устройство транспортного средства по п.9, характеризующееся тем, что принимается решение об обеспечении целевого момента в направлении поворота в горизонтальной плоскости, если указанный угол поворота больше заданного порогового значения или если скорость изменения указанного угла поворота равна нулю.
12. Приводное устройство транспортного средства по п.1, характеризующееся тем, что движущие силы для левого и правого ведущих колес определяются с использованием целевого момента в направлении поворота транспортного средства в горизонтальной плоскости, целевого момента в направлении поперечного наклона транспортного средства и целевого момента в направлении продольного наклона транспортного средства.
13. Приводное устройство транспортного средства по п.12, характеризующееся тем, что когда невозможно одновременно обеспечить целевой момент в направлении поворота транспортного средства в горизонтальной плоскости, целевой момент в направлении поперечного наклона транспортного средства и целевой момент в направлении продольного наклона транспортного средства, то обеспечивается по меньшей мере целевой момент в направлении поворота транспортного средства в горизонтальной плоскости или целевой момент в направлении поперечного наклона транспортного средства.
14. Приводное устройство транспортного средства по п.1, характеризующееся тем, что движущие силы для левого и правого ведущих колес определяются с использованием целевого момента в направлении поворота транспортного средства в горизонтальной плоскости и целевого момента в направлении поперечного наклона транспортного средства.
15. Приводное устройство транспортного средства по любому из пп.12-14, характеризующееся тем, что когда невозможно одновременно обеспечить целевой момент в направлении поворота транспортного средства в горизонтальной плоскости и целевой момент в направлении поперечного наклона транспортного средства, если момент поворота транспортного средства в горизонтальной плоскости, который, по оценкам, возникнет в ответ на движущие силы, создаваемые на левом и правом ведущих колесах (2l, 2r, 3l, 3r) для регулирования крена транспортного средства, превышает предельный момент поворота транспортного средства в горизонтальной плоскости, то обеспечивается целевой момент в направлении поворота транспортного средства в горизонтальной плоскости.
16. Приводное устройство транспортного средства по любому из пп.12-14, характеризующееся тем, что когда невозможно одновременно обеспечить целевой момент в направлении поворота транспортного средства в горизонтальной плоскости и целевой момент в направлении поперечного наклона транспортного средства, то обеспечивается целевой момент в направлении поперечного наклона транспортного средства.
17. Приводное устройство транспортного средства по любому из пп.12-14, характеризующееся тем, что когда невозможно одновременно обеспечить целевой момент в направлении поворота транспортного средства в горизонтальной плоскости и целевой момент в направлении поперечного наклона транспортного средства, то обеспечивается целевой момент в направлении поворота транспортного средства в горизонтальной плоскости.
18. Приводное устройство транспортного средства по любому из пп.12-14, характеризующееся тем, что решение об обеспечении целевого момента в направлении поворота транспортного средства в горизонтальной плоскости или целевого момента в направлении поперечного наклона транспортного средства принимается на основании угла поворота управляемого колеса транспортного средства и скорости изменения указанного угла поворота.
19. Приводное устройство транспортного средства по п.18, характеризующееся тем, что принимается решение об обеспечении целевого момента в направлении поперечного наклона, если значение указанного угла поворота равно или меньше заданного порогового значения, а скорость изменения указанного угла поворота не равна нулю.
20. Приводное устройство транспортного средства по п.18, характеризующееся тем, что принимается решение об обеспечении целевого момента в направлении поворота в горизонтальной плоскости, если значение указанного угла поворота больше заданного порогового значения или если скорость изменения указанного угла поворота равна нулю.
21. Приводное устройство транспортного средства по любому из пп.1-5 или 12-14, характеризующееся тем, что на указанных ведущих колесах предусмотрены электродвигатели, создающие движущие силы для ведущих колес.
| WO 2006013922 A1, 09.02.2006 | |||
| Способ и устройство для определения водности в условиях обледенения | 2024 |
|
RU2840577C1 |
| US 5465806 A, 11.14.1995 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |

