[Область техники, к которой относится изобретение]
[0001]
Настоящее изобретение относится к способу хранения информации транспортного средства, способу управления движением транспортного средства и устройству хранения информации транспортного средства.
[Уровень техники]
[0002]
Известно устройство обновления навигации и способ обновления навигации, в котором измеряются данные о движении транспортного средства, отслеживается возникновение возмущений, действующих на передние и задние колеса, в данных о движении транспортного средства, определяется наличие или отсутствие искусственной неровности по результатам отслеживания, вычисляется информация положения искусственной неровности, и обновляется вычисленная информация положения искусственной неровности (патентный документ 1: JP2015–204097A).
[Документ из уровня техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] JP2015–204097A
[Раскрытие изобретения]
[Проблемы, решаемые изобретением]
[0004]
Искусственные неровности включают в себя резкие и длинные, а также существуют другие формы искусственных неровностей. Соответственно, управление при прохождении искусственных неровностей является различным в зависимости от форм искусственных неровностей. Уровню техники присуща проблема того, что соответствующее управление не может быть выполнено в соответствии с формами искусственных неровностей, поскольку обновляется только информация положения искусственных неровностей.
[0005]
Задача, решаемая настоящим изобретением, состоит в создании способа и устройства хранения информации транспортного средства, с помощью которых может быть выполнено соответствующее управление в соответствии с формами искусственных неровностей, а также в создании способа управления движением транспортного средства с использованием упомянутой информации.
[Средства для решения проблем]
[0006]
Настоящее изобретение решает вышеупомянутую проблему путем определения того, прошло ли транспортное средство искусственную неровность, на основании состояния движения транспортного средства, и указания информации положения искусственной неровности и информации о скорости транспортного средства при прохождении искусственной неровности в качестве информации об искусственной неровности из истории движения, которая включает в себя результат определения того, прошло ли транспортное средство искусственную неровность, положение транспортного средства и состояние движения транспортного средства.
[Эффект изобретения]
[0007]
В соответствии с настоящим изобретением информация положения искусственной неровности и информация о скорости транспортного средства при прохождении искусственной неровности сохраняются в качестве информации об искусственной неровности, и, следовательно, может быть выполнено соответствующее управление с использованием информации об искусственной неровности в соответствии с формой искусственной неровности.
[Краткое описание чертежей]
[0008]
На Фиг. 1 показана схема, иллюстрирующая конфигурацию блоков системы получения информации о движении по первому варианту осуществления.
Фиг.2 - блок–схема, иллюстрирующая процедуру управления, выполняемую системой получения информации о движении по первому варианту осуществления.
Фиг.3 - схема, иллюстрирующая конфигурацию блоков системы управления движением транспортного средства по второму варианту осуществления.
Фиг.4 - блок–схема, иллюстрирующая процедуру управления, выполняемую системой управления движением транспортного средства по второму варианту осуществления.
[Осуществление изобретения]
[0009]
Далее с обращением к чертежам будут описаны варианты осуществления настоящего изобретения.
[0010]
«Первый вариант осуществления»
В настоящем варианте осуществления будет описан примерный случай, в котором устройство для хранения информации транспортного средства в соответствии с настоящим изобретением применяется в системе получения информации о движении, конфигурированной таким образом, что сервер 100 взаимодействует с бортовым устройством 200, установленным в транспортном средстве.
[0011]
На фиг.1 показана схема, иллюстрирующая конфигурацию блоков системы 1 получения информации о движении. Система 1 получения информации о движении по настоящему варианту осуществления включает в себя сервер 100 и бортовое устройство 200. Каждое из системы 1 получения информации о движении, сервера 100, бортового устройства 200 и различных устройств, включенных в него, могут представлять собой компьютер, который включает в себя блок арифметической обработки, такой как один или более CPU, и выполняет арифметическую обработку.
[0012]
Первым будет описано бортовое устройство 200.
Бортовое устройство 200 по настоящему варианту осуществления включает в себя контроллер 210 транспортного средства, устройство 220 обнаружения, навигационное устройство 230, устройство 240 обнаружения объектов, устройство 250 ввода и бортовое устройство 260 связи. Эти устройства, которые составляют бортовое устройство 200, соединены друг с другом через локальную сеть контроллеров (CAN) или другую бортовую локальную сеть для взаимного обмена информацией.
[0013]
Контроллер 210 транспортного средства по настоящему варианту осуществления представляет собой бортовой компьютер, такой как электронный блок управления (ECU). Транспортное средство может быть, например, электромобилем, имеющим электродвигатель в качестве источника движущей силы, механическим транспортным средством, имеющим двигатель внутреннего сгорания в качестве источника движущей силы, или гибридным автомобилем, имеющим как электродвигатель, так и двигатель внутреннего сгорания в качестве источника движущей силы. Примеры электромобиля или гибридного автомобиля, имеющего электродвигатель в качестве источника движущей силы, включают в себя устройства, в которых источником питания для электродвигателя является вторичная батарея, и типа, в котором источником питания для электродвигателя является топливный элемент.
[0014]
Контроллер 210 транспортного средства выполняет процесс вычисления информации о прохождении искусственной неровности как процесс вычисления информации, относящейся к искусственной неровности, пройденной транспортным средством (далее также называемой «информацией о прохождении искусственной неровности»). Процесс вычисления информации о прохождении искусственной неровности будет описан ниже.
[0015]
Контроллер 210 транспортного средства по настоящему варианту осуществления снабжен устройством 220 обнаружения. Устройство 220 обнаружения включает в себя датчик 221 скорости вращения колеса, датчик 222 скорости транспортного средства и датчик 223 ориентации. Датчик 221 скорости вращения колеса, который предусмотрен для каждого колеса транспортного средства, определяет скорость вращения колеса и выводит обнаруженную скорость вращения на контроллер 210 транспортного средства. Датчик 222 скорости транспортного средства определяет скорость и/или ускорение транспортного средства и выводит обнаруженную скорость и/или ускорение на контроллер 210 транспортного средства. Направления скорости и/или ускорения, обнаруженные датчиком 222 скорости транспортного средства, не ограничиваются направлением движения транспортного средства и включают в себя вертикальное направление транспортного средства. Датчик 223 ориентации определяет ориентацию транспортного средства (включая высоту транспортного средства), угол наклона транспортного средства, угол поворота транспортного средства и угол крена транспортного средства, и выводит их на контроллер 210 транспортного средства. Примером датчика 223 ориентации может быть инерциальный измерительный блок (IMU), такой как гироскопический датчик.
[0016]
Бортовое устройство 200 по настоящему варианту осуществления включает в себя навигационное устройство 230. Навигационное устройство 230 вычисляет маршрут от текущего местоположения транспортного средства до пункта назначения. Схема вычисления маршрута может быть известной на момент подачи этой заявки схемой на основании алгоритма поиска графов, такого как алгоритм Дейкстры или алгоритм поиска A*. Вычисленный маршрут передается на контроллер 210 транспортного средства.
Навигационное устройство 230 включает в себя устройство 231 обнаружения положения. Устройство 231 обнаружения положения отвечает за Глобальную систему определения местоположения (GPS) и обнаруживает положение движения (широта/долгота) движущегося транспортного средства. Другим примером устройства 231 обнаружения положения является инерциальная навигационная система (INS). INS включает в себя гироскопический датчик и датчик ускорения, вычисляет скорость путем интегрирования ускорения, вычисляет расстояние путем интегрирования скорости и обнаруживает направление движения с использованием гироскопического датчика. INS вычисляет расстояние движения от определённой начальной точки на основании результатов вычисления и обнаруженного направления.
[0017]
Устройство 231 обнаружения положения не ограничено каким–либо одним из вышеописанных устройств и также может быть устройством, которое адаптировано, например, к GPS и INS. В этом случае устройство 231 обнаружения положения может точно вычислять положение движения транспортного средства из положения движения транспортного средства, которое является абсолютным положением, обнаруженным с использованием GPS, и относительного расстояния движения транспортного средства, вычисленного с помощью INS. Устройство 231 обнаружения положения может обнаруживать положение движения транспортного средства, например, в единицах около нескольких десятков сантиметров. Настоящий вариант осуществления будет описан с предположением, что устройство 231 обнаружения положения является устройством, которое адаптировано для GPS и INS.
[0018]
Способы определения положения движения рассматриваемого транспортного средства не ограничены способом использования результата обнаружения от устройства 231 обнаружения положения без какого–либо изменения. Например, в качестве устройства 231 обнаружения положения может использоваться всенаправленный датчик. Всенаправленный датчик предусмотрен, например, в заданном месте транспортного средства, из которого может просматриваться окружение транспортного средства, и сканирует все окружающие направления для транспортного средства, тем самым формируя трехмерную диаграмму изображения, которая представляет все окружающие направления для транспортного средства. Положение движения транспортного средства может быть обнаружено путем выполнения процесса сопоставления карты с использованием сформированной диаграммы изображения и картографической информации 232, которая будет описана ниже.
[0019]
Навигационное устройство 230 включает в себя доступную картографическую информацию 232 и дорожную информацию 233. Достаточно того, чтобы картографическая информация 232 и дорожная информация 233 могли быть считаны навигационным устройством 230. Картографическая информация 232 и дорожная информация 233 могут быть сохранены в базе данных, выполненной с возможностью быть физически отделённой от навигационного устройства 230, или также могут быть сохранены на сервере 100, с которого сохраненная информация доступна для считывания через бортовое устройство 260 связи.
Картографическая информация 232 является так называемой электронной картой, которая представляет информацию, в которой широта и долгота связаны с информацией карты. Картографическая информация 232 имеет дорожную информацию 233, которая связана с каждой точкой.
[0020]
Дорожная информация 233 определяется узлами и участками, соединяющими узлы. Дорожная информация 233 включает в себя информацию для указания дороги по положению/области дороги, информацию о типе дороги и ширине дороги для каждой дороги, информацию о форме дороги и информацию о разрешённой скорости на дороге. Дорожная информация 233 сохраняется таким образом, что идентификационная информация каждого участка дороги связана с положением перекрестка, направлением въезда на перекресток, типом перекрестка и другой информацией, относящейся к перекрестку. В качестве дополнения или альтернативы, дорожная информация 233 может храниться таким образом, что идентификационная информация каждого участка дороги связана с типом дороги, шириной дороги, формой дороги, разрешено ли прямолинейное движение, отношениями приоритетности движения, разрешен ли обгон (разрешена ли смена полосы движения на смежную полосу движения), положением линии границы дороги, положением линии остановки и другой информацией, относящейся к дороге.
[0021]
Когда бортовое устройство 200 установлено в транспортном средстве, которое движется посредством операции автономного управления (автономного или автоматического управления), а не посредством операции управления со стороны водителя, дорожная информация 233 предпочтительно сохраняется в виде дорожной информации высокой точности. В этом случае транспортное средство может двигаться на основании картографической информации 232, которая является картографической информацией высокого разрешения. Настоящий вариант осуществления будет описан с предположением, что картографическая информация 232 является картографической информацией высокого разрешения.
[0022]
Навигационное устройство 230 задает маршрут движения, по которому движется рассматриваемое транспортное средство, на основании текущего положения рассматриваемого транспортного средства, обнаруженного устройством 231 обнаружения положения. Маршрут движения является запланированным маршрутом движения для рассматриваемого транспортного средства и/или маршрутом движения, по которому фактически двигалось рассматриваемое транспортное средство. Маршрут движения также может быть маршрутом к пункту назначения, указанному пользователем, или маршрутом к пункту назначения, оцененному на основании истории движения рассматриваемого транспортного средства/пользователя. Маршрут движения, по которому движется рассматриваемое транспортное средство, может указываться для каждой дороги, может указываться для каждой дороги, на которой обозначено направление въезда/выезда, или указываться для каждой полосы движения, по которой фактически движется рассматриваемое транспортное средство. Навигационное устройство 230 обращается к дорожной информации 233 для указания участка дороги для каждой полосы движения на маршруте движения, по которому движется рассматриваемое транспортное средство.
Маршрут движения включает в себя указание информации (информации о координатах) для одной или более точек, через которые транспортное средство будет двигаться в будущем. Маршрут движения включает в себя по меньшей мере точку, которая предполагает следующее положение движения, в котором движется рассматриваемое транспортное средство. Маршрут движения может состоять из непрерывной линии или также может состоять из отдельных точек. Хотя это и не ограничено конкретно, маршрут движения определяется идентификатором дороги, идентификатором полосы движения и/или идентификатором участка. Эти идентификатор дороги, идентификатор полосы и идентификатор участка определены в картографической информации 232 и/или в дорожной информации 233.
[0023]
Бортовое устройство 200 включает в себя устройство 240 обнаружения объектов. Устройство 240 обнаружения объектов обнаруживает обстановку вокруг рассматриваемого транспортного средства. Устройство 240 обнаружения объектов рассматриваемого транспортного средства обнаруживает присутствие и положения нахождения объектов, включая препятствия, которые могут присутствовать вокруг рассматриваемого транспортного средства. Хотя это не ограничено конкретно, устройство 240 обнаружения объектов включает в себя камеру 241. Камера 241 представляет собой, например, устройство формирования изображения, включающее в себя элемент формирования изображения, такой как ПЗС. Камера 241 также может быть инфракрасной камерой или стереокамерой. Камера 241 расположена в определенном положении в рассматриваемом транспортном средстве и захватывает изображения объектов вокруг рассматриваемого транспортного средства. Термин «вокруг рассматриваемого транспортного средства» в контексте настоящего описания охватывает понятия «впереди рассматриваемого транспортного средства», «позади рассматриваемого транспортного средства», «сбоку от рассматриваемого транспортного средства с левой стороны» и «сбоку от рассматриваемого транспортного средства с правой стороны». Объекты включают в себя двумерные знаки, такие как линии остановки или линии границ полос движения, нанесённые на поверхности дороги. Объекты включают в себя трехмерные физические объекты. Объекты включают в себя стационарные объекты, такие как дорожные знаки. Объекты включают в себя движущиеся физические объекты, такие как пешеходы, двухколесные транспортные средства и четырехколесные транспортные средства (другие транспортные средства). Объекты включают в себя дорожные конструкции, такие как ограждения, разделительные полосы и бордюрные камни.
[0024]
Устройство 240 обнаружения объектов может анализировать данные изображения и идентифицировать тип объекта на основании результата анализа. Устройство 240 обнаружения объектов использует метод сопоставления с образцом или другой подобный метод, чтобы идентифицировать, является ли объект, включенный в данные изображения, транспортным средством, пешеходом, дорожным знаком или двумерным знаком, нанесенным на поверхности дороги. Устройство 240 обнаружения объектов обрабатывает полученные данные изображения для определения расстояния от рассматриваемого транспортного средства до объекта, присутствующего в окружении рассматриваемого транспортного средства, на основании положения объекта. В частности, устройство 240 обнаружения объектов получает взаимное расположение между объектом и рассматриваемым транспортным средством.
[0025]
В качестве устройства 240 обнаружения объектов может использоваться радарное устройство 242. Примеры радарного устройства 242 для использования включают в себя такие, как радар миллиметрового диапазона, лазерный радар, ультразвуковой радар и лазерный дальномер, которые имеют схемы, известные на момент подачи заявки. Устройство 240 обнаружения объектов обнаруживает присутствие или отсутствие объектов, положения объектов, расстояния до объектов и относительные скорости объектов по отношению к рассматриваемому транспортному средству на основании принятых сигналов от радарного устройства 242. Устройство 240 обнаружения объектов может обнаруживать присутствие или отсутствие объектов, положения объектов, расстояния до объектов и относительные скорости объектов по отношению к рассматриваемому транспортному средству на основании результатов кластеризации информации облака точек, полученной с использованием лазерного радара.
[0026]
Когда другое транспортное средство и рассматриваемое транспортное средство способны осуществлять связь между транспортными средствами, устройство 240 обнаружения объектов может получать скорость транспортного средства и ускорение для другого транспортного средства, которые обнаруживаются датчиком скорости транспортного средства другого транспортного средства, и/или факт присутствия другого транспортного средства, в качестве информации об объектах. В качестве дополнения или альтернативы, устройство 240 обнаружения объектов может получать информацию об объектах, которая включает в себя положение, скорость и ускорение другого транспортного средства, от внешних устройств интеллектуальных транспортных систем (ITS).
[0027]
Устройство 250 ввода по настоящему варианту осуществления включает в себя педаль 251 тормоза и педаль 252 акселератора. Когда водитель нажимает, например, на педаль 251 тормоза, педаль 251 тормоза выводит на контроллер 210 транспортного средства сигнал, указывающий, что выполняется операция торможения, и сигнал, указывающий величину нажатия педали. Аналогичным образом, когда водитель нажимает, например, на педаль 252 акселератора, педаль 252 акселератора выводит на контроллер 210 транспортного средства сигнал, указывающий, что выполняется операция акселератора, и сигнал, указывающий величину нажатия педали.
[0028]
Бортовое устройство 260 связи по настоящему варианту осуществления может осуществлять связь с серверным устройством 40 связи сервера 100 через сеть телефонной линии или другую аналогичную сеть. Бортовое устройство 260 связи передает информацию о прохождении искусственной неровности, полученную от контроллера 210 транспортного средства, на серверное устройство 40 связи, принимает информацию от серверного устройства 40 связи и выводит принятую информацию на контроллер 210 транспортного средства. Примеры бортового устройства 260 связи включают в себя устройство, имеющее функцию мобильной связи 4G LTE, и устройство, имеющее функцию связи WiFi.
[0029]
Время, когда бортовое устройство 260 связи выполняет передачу/прием с серверным устройством 40 связи, конкретно не ограничено. Например, если бортовое устройство 260 связи может постоянно осуществлять связь с серверным устройством 40 связи посредством 4G LTE, бортовое коммуникационное устройство 260 может постоянно обмениваться информацией с серверным устройством 40 связи. В качестве дополнения или альтернативы, если бортовое устройство 260 связи может периодически обмениваться данными с серверным устройством 40 связи, например, через соединение WiFi, бортовое устройство 260 связи может обмениваться информацией с серверным устройством 40 связи в момент времени, когда бортовое устройство 260 связи может осуществлять связь с серверным устройством 40 связи. В этом случае бортовое устройство 260 связи временно сохраняет информацию, которая вводится от контроллера 210 транспортного средства, во внешнем или встроенном запоминающем устройстве (например, HDD). Затем бортовое устройство 260 связи считывает информацию с запоминающего устройства и передает информацию на серверное устройство 40 связи в момент времени, когда возможна связь с серверным устройством 40 связи.
[0030]
Далее будет описан процесс вычисления информации о прохождении искусственной неровности, выполняемый контроллером 210 транспортного средства.
Контроллер 210 транспортного средства является вычислительным устройством, которое вычисляет информацию, относящуюся к искусственной неровности. В частности, контроллер 210 транспортного средства представляет собой компьютер, включающий в себя постоянное запоминающее устройство (ROM), в котором хранится программа для выполнения процесса вычисления информации о прохождении искусственной неровности, центральный процессор (CPU) в качестве операционной схемы, которая выполняет программу, сохраненную в ROM, для выполнения процесса вычисления информации о прохождении искусственной неровности, и оперативное запоминающее устройство (RAM), которое служит в качестве запоминающего устройства с возможностью осуществления доступа.
[0031]
В частности, контроллер 210 транспортного средства по настоящему варианту осуществления выполняет следующие процессы для вычисления информации о прохождении искусственной неровности. Контроллер 210 транспортного средства выполняет процесс определения искусственной неровности для определения того, прошло ли рассматриваемое транспортное средство искусственную неровность, процесс обнаружения положения транспортного средства для обнаружения положения рассматриваемого транспортного средства на карте, процесс определения объектов для определения того, влияет ли объект, присутствующий в окружении рассматриваемого транспортного средства, на скорость транспортного средства, и процесс вычисления информации о прохождении искусственной неровности для формирования информации о прохождении искусственной неровности из результатов трех вышеупомянутых процессов.
[0032]
Контроллер 210 транспортного средства выполняет каждую из вышеупомянутых функций посредством взаимодействия программного обеспечения для реализации каждой функции или для выполнения каждого процесса и вышеописанного аппаратного обеспечения.
[0033]
Первым будет описан процесс определения скорости.
Контроллер 210 транспортного средства определяет, прошло ли рассматриваемое транспортное средство искусственную неровность, на основании результата обнаружения от устройства 220 обнаружения. Когда транспортное средство проходит искусственную неровность, на транспортное средство воздействует возмущение. Более конкретно, когда транспортное средство проходит искусственную неровность, состояние движения транспортного средства (например, скорость/ускорение, скорость вращения колеса, ориентация транспортного средства, включая высоту транспортного средства и т.п.) изменяется между состоянием до и после того, как транспортное средство проходит искусственную неровность. Возмущение в настоящем варианте осуществления относится к возмущению по отношению с состоянию, в котором транспортное средство движется в области без искусственных неровностей. Контроллер 210 транспортного средства определяет, прошло ли транспортное средство искусственную неровность, используя возмущения, воздействующие на рассматриваемое транспортное средство, в качестве инициирующего фактора.
[0034]
Например, контроллер 210 транспортного средства отслеживает скорость вращения каждого колеса, обнаруживаемую датчиком 221 скорости вращения колеса, и, когда величина изменения скорости вращения переднего колеса не меньше заданной пороговой величины, контроллер 210 транспортного средства определяет, что на переднее колесо действует возмущение. Контроллер 210 транспортного средства начинает вычисление расстояния движения рассматриваемого транспортного средства путем интегрирования скорости рассматриваемого транспортного средства из положения, в котором выполнено определение, что на переднее колесо воздействует возмущение. Затем, когда величина изменения скорости вращения заднего колеса не меньше заданной пороговой величины, контроллер 210 транспортного средства определяет, что на заднее колесо воздействует возмущение, и заканчивает вычисление расстояния движения рассматриваемого транспортного средства. Если величина изменения скорости вращения каждого из передних и задних колес меньше заданной пороговой величины, контроллер 210 транспортного средства определяет, что на передние и задние колеса не воздействуют никакие возмущения. Заданная пороговая величина является значением, которое получается экспериментальным путём.
[0035]
Кроме того, контроллер 210 транспортного средства заканчивает вычисление расстояния движения рассматриваемого транспортного средства и сравнивает вычисленное расстояние движения рассматриваемого транспортного средства с колесной базой рассматриваемого транспортного средства, чтобы таким образом определить, прошло ли рассматриваемое транспортное средство искусственную неровность в тот момент, когда на заднее колесо воздействует возмущение. В частности, когда разность между вычисленным расстоянием движения рассматриваемого транспортного средства и колесной базой рассматриваемого транспортного средства не превышает заданное пороговое значение, контроллер 210 транспортного средства определяет, что рассматриваемое транспортное средство прошло искусственную неровность. С другой стороны, когда разность превышает заданную пороговую величину, контроллер 210 транспортного средства определяет, что рассматриваемое транспортное средство не прошло искусственную неровность. Этот способ определения основан на точке зрения, согласно которой, когда транспортное средство проходит искусственную неровность, расстояние движения транспортного средства становится коротким. Колесная база рассматриваемого транспортного средства – это расстояние между передними колесами и задними колесами. Информация о колесной базе предварительно сохраняется в ROM или тому подобном. Заданная пороговая величина является значением, которое получается экспериментальным путём.
[0036]
Способы обнаружения возмущения, воздействующего на транспортное средство, не ограничены способом использования результата обнаружения с помощью датчика скорости вращения колеса. Например, контроллер 210 транспортного средства может использовать ускорение вверх или вниз, включенное в результат обнаружения от датчика 222 скорости транспортного средства. В этом случае, например, когда величина изменения ускорения вверх не меньше заданной пороговой величины, контроллер 210 транспортного средства определяет, что на переднее колесо воздействует возмущение. Затем, после обнаружения возмущения, действующего на переднее колесо, когда величина изменения ускорения вверх не меньше заданной пороговой величины, контроллер 210 транспортного средства определяет, что на заднее колесо действует возмущение. Когда величина изменения ускорения вверх меньше заданной пороговой величины, контроллер 210 транспортного средства определяет, что на передние и задние колеса не действуют возмущения. В качестве дополнения или альтернативы, например, контроллер 210 транспортного средства может использовать высоту рассматриваемого транспортного средства, включенную в результат обнаружения от датчика 223 ориентации. В этом случае способ определения возникновения возмущения является таким же, как и вышеописанный способ определения с использованием ускорения вверх или ускорения вниз, и его описание будет учтено здесь.
[0037]
Здесь точность определения искусственной неровности на основании возмущения, действующего на передние и задние колеса, будет описана с обращением к контроллеру транспортного средства в соответствии со сравнительным примером. Этот контроллер транспортного средства согласно сравнительному примеру выполняет обнаружение искусственной неровности только на основании возмущений, действующих на передние и задние колеса. Предполагается, что способ обнаружения искусственной неровности является таким же, как и в вышеописанном контроллере транспортного средства по настоящему варианту осуществления. В этом случае точность обнаружения искусственной неровности контроллером по сравнительному примеру невысока, поэтому может произойти следующее ошибочное определение.
[0038]
Например, когда транспортное средство проезжает углубление на дороге, контроллер по сравнительному примеру обнаруживает величину изменения скорости вращения переднего колеса и величину изменения скорости вращения заднего колеса. Затем, если разность между расстоянием от положения, в котором обнаружено возмущение, действующее на переднее колесо, до положения, в котором обнаружено возмущение, действующее на заднее колесо, и колесной базой рассматриваемого транспортного средства, составляет не более заданной пороговой величины, контроллер по сравнительному примеру ошибочно определяет, что транспортное средство прошло искусственную неровность. То есть не может быть выполнено определение для четкого различения искусственной неровности и углубления на дороге или упавшего предмета на дороге, просто путем обнаружения возмущения, действующего на переднее колесо, и возмущения, действующего на заднее колесо. Например, рассмотрим случай, в котором информация о положении искусственной неровности, обнаруженной контроллером по сравнительному примеру, применяется к транспортному средству, управляемому автономно. В этом случае транспортное средство может замедляться в ответ на углубление на дороге, которое не требует замедления транспортного средства. Также в ситуации, в которой лучше двигаться, уклоняясь от упавшего предмета, транспортное средство может замедляться, не уклоняясь от упавшего предмета. Таким образом, трудно применить результат обнаружения искусственной неровности к технологии управления для транспортного средства в автономном режиме, поскольку в способе обнаружения искусственной неровности, основанном только на возмущении, действующем на передние и задние колеса, точность определения является низкой.
[0039]
Напротив, контроллер 210 транспортного средства по настоящему варианту осуществления выполняет следующий процесс и, таким образом, может обнаруживать искусственную неровность с высокой степенью точности, когда вышеописанный способ определяет, что транспортное средство прошло искусственную неровность. В нижеследующем описании то, что определяется в качестве искусственной неровности вышеописанным способом, будет упоминаться как «возможная искусственная неровность», а способы обнаружения искусственной неровности с высокой точностью будут описаны ниже.
[0040]
Первым будет описан способ обнаружения искусственной неровности, основанный на возмущении, воздействующем на правое и левое колеса.
Контроллер 210 транспортного средства определяет, является ли возможная искусственная неровность искусственной неровностью, на основании возмущения, действующего на правое и левое колеса. После обнаружения возможной искусственной неровности контроллер 210 транспортного средства определяет, является ли возможная искусственная неровность искусственной неровностью, в соответствии с разностью между величиной изменения скорости вращения левого колеса и величиной изменения вращения скорости вращения правого колеса.
[0041]
Как описано выше, контроллер 210 транспортного средства отслеживает скорости вращения правого и левого колес при обнаружении возможной искусственной неровности. Например, при обнаружении возможной искусственной неровности контроллер 210 транспортного средства вычисляет разность скоростей вращения правого и левого колес в момент времени, когда на переднее колесо воздействует возмущение, и скоростями вращения правого и левого колес в момент, когда на заднее колесо воздействует возмущение. Посредством этой операции контроллер 210 транспортного средства вычисляет величину изменения скорости вращения левого колеса и величину изменения скорости вращения правого колеса. Затем, когда разность величины изменения скорости вращения левого колеса и величины изменения скорости вращения правого колеса не превышает заданную пороговую величину, контроллер 210 транспортного средства определяет возможную искусственную неровность как искусственную неровность. С другой стороны, когда разность больше заданной пороговой величины, контроллер 210 транспортного средства не определяет возможную искусственную неровность в качестве искусственной неровности. Этот способ определения основан на точке зрения, согласно которой возмущение, действующее на правое и левое колеса транспортного средства, отличается между тем, когда транспортное средство проходит искусственную неровность, и когда транспортное средство проходит углубление на дороге или упавший предмет, присутствующий на дороге. В настоящем варианте осуществления вышеупомянутый способ определения позволяет различать углубление в дороге или упавший предмет и искусственную неровность. Заданная пороговая величина – это величина, полученная экспериментальным путём.
[0042]
Будет описан другой способ обнаружения искусственной неровности, который основан на скорости транспортного средства до и после прохождения возможной искусственной неровности.
Контроллер 210 транспортного средства отслеживает скорость транспортного средства, которая вводится от датчика 222 скорости транспортного средства. После обнаружения возможной искусственной неровности контроллер 210 транспортного средства определяет, является ли или нет возможная искусственная неровность искусственной неровностью, в соответствии со скоростью транспортного средства до и после прохождения возможной искусственной неровности.
[0043]
Например, при обнаружении возможной искусственной неровности, когда скорость транспортного средства меньше заданной пороговой величины на двух участках: заданный участок, расположенный за положением, в котором на переднее колесо воздействует возмущение; и заданный участок, расположенный перед положением, в котором на заднее колесо воздействует возмущение, контроллер транспортного средства 210 определяет возможную искусственную неровность в качестве искусственной неровности. С другой стороны, когда скорость транспортного средства больше заданной пороговой величины на любом из двух участках или на обоих участках, контроллер транспортного средства 210 не определяет возможную искусственную неровность в качестве искусственной неровности. Этот способ определения основан на точке зрения, что искусственная неровность вызывает замедление в то время как неровность, такая как соединение дорог или препятствие, не вызывает замедление. В настоящем варианте осуществления вышеуказанный способ определения позволяет различать неровность дороги или препятствие и искусственную неровность. Примером заданных участков может быть участок из нескольких транспортных средств. Контроллер 210 транспортного средства временно хранит информацию о скорости транспортного средства на носителе данных, таком как RAM, с точки зрения заданных участков, и может тем самым получить скорость транспортного средства перед прохождением возможной искусственной неровности. Заданная пороговая величина – это величина, полученная экспериментальным путём.
[0044]
Будет описан ещё один способ обнаружения искусственной неровности, который основан на операции торможения перед прохождением возможной искусственной неровности и операции ускорения после прохождения возможной искусственной неровности.
Контроллер 210 транспортного средства отслеживает сигнал операции торможения от педали 251 тормоза и сигнал операции ускорения от педали 252 акселератора. После обнаружения возможной искусственной неровности контроллер 210 транспортного средства определяет, является ли возможная искусственная неровность искусственной неровностью, в соответствии с операцией торможения перед прохождением возможной искусственной неровности и операцией ускорения после прохождения возможной искусственной неровности.
[0045]
Например, при обнаружении возможной искусственной неровности, когда на заданном расстоянии, расположенном за положением, в котором на переднее колесо воздействует возмущение, обнаруживается операция торможения, , или на заданном расстоянии, расположенном перед положением, в котором на заднее колесо воздействует возмущение обнаруживается операция ускорения, контроллер транспортного средства 210 определяет возможную искусственную неровность в качестве искусственной неровности. С другой стороны, когда на заданном расстоянии, расположенном за положением, в котором на переднее колесо воздействует возмущение, не обнаруживается операция торможения, а на заданном расстоянии, расположенном перед положением, в котором на заднее колесо воздействует возмущение, не обнаруживается операция ускорения, контроллер 210 транспортного средства не определяет возможную искусственную неровность в качестве искусственной неровности. Этот способ определения основан на той же точке зрения, что и в вышеописанном способе обнаружения скорости. Примером заданных расстояний может быть расстояние из нескольких транспортных средств. Контроллер 210 транспортного средства временно хранит информацию об операции торможения на носителе данных, таком как RAM, с точки зрения заданных расстояний, и таким образом может быть получена операция торможения перед прохождением возможной искусственной неровности.
[0046]
Нет необходимости использовать все три описанных способа обнаружения искусственной неровности, и может быть выбран любой способ обнаружения, или могут быть объединены два или три способа обнаружения в зависимости от нагрузки на арифметическую обработку и скорость арифметической обработки.
[0047]
Далее будет описан процесс обнаружения положения транспортного средства.
Контроллер 210 транспортного средства определяет положение, в котором движется транспортное средство, на основании обнаружения результатов от устройства 231 обнаружения положения. Например, если устройство 231 обнаружения положения адаптировано к GPS и INS, как в настоящем варианте осуществления, контроллер 210 транспортного средства может использовать сам результат обнаружения устройства 231 обнаружения положения в качестве положения движения транспортного средства. С другой стороны, если в качестве устройства 231 обнаружения положения используется всенаправленный датчик, например, контроллер 210 транспортного средства выполняет так называемое сопоставление карты из трехмерной диаграммы изображения, которая представляет все окружающие направления для транспортного средства, и картографической информации 232, и таким образом может обнаруживать положение движения транспортного средства. Результаты обработки, полученные процессом обнаружения положения транспортного средства, включают в себя положение движения транспортного средства и идентификатор полосы движения (участка дороги) для полосы движения, по которой движется транспортное средство. Процесс обнаружения положения транспортного средства не ограничен вышеописанным способом, и любой процесс обнаружения положения транспортного средства, известный на момент подачи настоящей заявки, может использоваться в соответствующих случаях.
[0048]
Ниже будет описан процесс определения объектов.
Контроллер 210 транспортного средства определяет, влияет ли объект, присутствующий в окружении транспортного средства, на скорость транспортного средства, на основании результата обнаружения от устройства 240 обнаружения объектов и картографической информации 232. Например, контроллер 210 транспортного средства выполняет процесс обнаружения положения транспортного средства для указания положения движения рассматриваемого транспортного средства на карте. Затем контроллер 210 транспортного средства получает тип объекта и взаимное расположение объекта по отношению к рассматриваемому транспортному средству от устройства 240 обнаружения объектов и указывает положение объекта на карте. Это позволяет выполнить определение того, находится ли объект на том же участке, что и участок полосы движения, по которой движется рассматриваемое транспортное средство.
[0049]
Затем контроллер 210 транспортного средства определяет, влияет ли объект на скорость транспортного средства для рассматриваемого транспортного средства, в соответствии с положением объекта на карте и типом объекта. Например, при обнаружении пешехода, присутствующего рядом с пешеходным переходом на маршруте движения рассматриваемого транспортного средства, контроллер 210 транспортного средства определяет, что объект влияет на скорость транспортного средства для рассматриваемого транспортного средства.
[0050]
В качестве дополнения или альтернативы, при обнаружении транспортного средства, которое движется по тому же участку, что и участок на маршруте движения рассматриваемого транспортного средства, и которое движется в пределах заданного расстояния впереди рассматриваемого транспортного средства, контроллер 210 транспортного средства определяет, что объект влияет на скорость транспортного средства для рассматриваемого транспортного средства. В этом случае контроллер 210 транспортного средства определяет, что имеется движущееся впереди транспортное средство, которое влияет на скорость транспортного средства для рассматриваемого транспортного средства. Заданное расстояние может быть фиксированным расстоянием или также может быть расстоянием, которое изменяется в зависимости от скорости транспортного средства для рассматриваемого транспортного средства. Например, контроллер 210 транспортного средства может устанавливать заданное расстояние равным 100 м, когда скорость транспортного средства составляет 100 км/ч, и устанавливать заданное расстояние равным 20 м, когда скорость транспортного средства составляет 20 км/ч.
[0051]
Способы обнаружения движущегося впереди транспортного средства, которые влияют на скорость транспортного средства для рассматриваемого транспортного средства, не ограничены вышеописанным способом. Например, если, с учётом результата процесса определения искусственной неровности, объект, расположенный на заданном расстоянии от рассматриваемого транспортного средства, обнаружен по том же участке, что и участок, по которому проходит маршрут движения рассматриваемого транспортного средства, перед прохождением искусственной неровности, обнаруженный объект может быть определен как движущееся впереди транспортное средство. Этот способ определения основан на точке зрения, что интересующие ситуации ограничены ситуацией, в которой транспортное средство проходит искусственную неровность, и выполняется определение в отношении того, влияет ли объект на скорость транспортного средства в этой ситуации.
[0052]
Ниже будет описан процесс вычисления информации о прохождении искусственной неровности.
Контроллер 210 транспортного средства вычисляет информацию о прохождении искусственной неровности на основании соответствующих результатов обработки процесса определения искусственной неровности, процесса обнаружения положения транспортного средства и процесса определения объектов. В частности, когда процесс определения объектов служит для определения того, что нет объекта, который влияет на скорость транспортного средства для рассматриваемого транспортного средства, контроллер 210 транспортного средства вычисляет информацию о прохождении искусственной неровности на основании результатов обработки процесса определения искусственной неровности и процесса обнаружения положения транспортного средства. Затем контроллер 210 транспортного средства выводит историю движения, включающую в себя вычисленную информацию о прохождении искусственной неровности, на бортовое устройство 260 связи.
[0053]
Информация о прохождении искусственной неровности включает в себя идентификатор транспортного средства для идентификации транспортного средства, положение искусственной неровности, которая было пройдена транспортным средством, информацию об участке, на котором находится искусственная неровность, скорость транспортного средства в момент времени, когда рассматриваемое транспортное средство прошло искусственную неровность, и скорость транспортного средства, операцию торможения и операцию ускорения до и после того, как рассматриваемое транспортное средство прошло искусственную неровность. Другими словами, в информации о прохождении искусственной неровности идентификатор транспортного средства, положение, участок, скорость транспортного средства, операция торможения и операция ускорения связаны с одной искусственной неровностью. Контроллер 210 транспортного средства может вычислять информацию об участке, на котором расположена искусственная неровность, путем сопоставления положения движения рассматриваемого транспортного средства при прохождении искусственной неровности с картографической информацией 232.
[0054]
Момент времени, в который контроллер 210 транспортного средства вычисляет информацию о прохождении искусственной неровности, конкретно не ограничен. Например, при обнаружении одной искусственной неровности контроллер 210 транспортного средства может вычислять информацию о прохождении искусственной неровности и накапливать информацию о прохождении искусственной неровности каждый раз, когда транспортное средство проходит искусственную неровность. В качестве дополнения или альтернативы, в момент времени, когда рассматриваемое транспортное средство прибывает в заданное место назначения, контроллер 210 транспортного средства может вычислять информацию о прохождении искусственной неровности для всех обнаруженных на тот момент искусственных неровностей. В этом случае контроллер 210 транспортного средства вычисляет информацию о прохождении искусственной неровности на основании истории движения, которая включает в себя результат обнаружения искусственной неровности, маршрут движения, скорость транспортного средства, операцию торможения и операцию ускорения.
[0055]
Далее будет описан сервер 100.
Сервер 100 включает в себя устройство 10 управления, базу 20 данных, запоминающее устройство 30 и серверное устройство 40 связи. Устройство 10 управления, база 20 данных, запоминающее устройство 30 и серверное устройство 40 связи могут обмениваться информацией друг с другом по проводной или беспроводной линии связи. Серверное устройство 40 связи выполняет обмен информацией с бортовым устройством 200, обмен информацией внутри сервера 100 и обмен информацией с внешней системой 1 получения информации о движении.
[0056]
Серверное устройство 40 связи может осуществлять связь с бортовым устройством 260 связи бортового устройства 200 через сеть телефонной линии. Серверное устройство 40 связи принимает множество историй путешествий от множества бортовых устройств 200, установленных на соответствующих транспортных средствах, и выводит принятое множество историй путешествий в устройство 10 управления. Кроме того, серверное устройство 40 связи передает информацию об искусственных неровностях, полученную от устройства 10 управления, на бортовые устройства 200. Работа серверного устройства 40 связи не ограничивается приемом историй движения от множества транспортных средств, и серверное устройство 40 связи может получать историю движения от бортового устройства 200, установленного на одном транспортном средстве, дважды или более.
[0057]
База 20 данных является базой данных, которая хранит истории движения, полученные от одного или более транспортных средств. Каждая история движения включает информацию о прохождении искусственных неровностей. Информация о прохождении искусственных неровностей включает в себя идентификатор транспортного средства, идентификационный номер искусственной неровности для идентификации искусственной неровности, информацию о положении искусственной неровности, связанная с участком дороги, и информацию о скорости транспортного средства, операции торможения и операции ускорения в положении искусственной неровности и вокруг упомянутого положения. Когда от множества транспортных средств получено множество элементов информации о прохождении искусственных неровностей, информация о прохождении искусственных неровностей сохраняется в базе 20 данных для каждого транспортного средства. База 20 данных может хранить картографическую информацию 232 и дорожную информацию 233, которые включены в бортовое устройство или устройства 200. Настоящий вариант осуществления будет описан с предположением, что база 20 данных хранит картографическую информацию 232 и дорожную информацию 233.
[0058]
Запоминающее устройство 30 включает в себя одно или более запоминающих устройств с произвольным доступом (RAM), которые служат в качестве запоминающего устройства с возможностью осуществления доступа. Устройство 10 управления включает в себя процессор 11, который будет описан ниже. Процессор 11 имеет функцию указания информации об искусственных неровностях. Запоминающее устройство 30 хранит информацию о положении искусственной неровности и информацию о скорости транспортного средства, об операции торможения и операции ускорения, связанных с положением искусственной неровности, которые заданы из множества элементов информации о прохождении искусственной неровности, сохранённых в базе 20 данных, в качестве информации об искусственной неровности для каждой искусственной неровности. Информация о положении искусственной неровности связана с участком дороги в дорожной информации 233.
[0059]
Далее будет описано устройство 10 управления.
Устройство 10 управления включает в себя процессор 11. Процессор 11 является вычислительным устройством, которое выполняет процесс получения информации о движении. В частности, процессор 11 представляет собой компьютер, включающий в себя постоянное запоминающее устройство (ROM), в котором хранится программа для выполнения процесса получения информации о движении, центральный процессор (CPU) в качестве операционной схемы, которая выполняет программу, сохраненную в ROM, для выполнения процесса получения информации о движении, и оперативное запоминающее устройство (RAM), которое служит в качестве запоминающего устройства с возможностью осуществления доступа.
[0060]
Процессор 11 в соответствии с настоящим вариантом осуществления выполняет процесс сохранения информации о прохождении искусственной неровности для сохранения информации о прохождении искусственной неровности, которая передается от бортового устройства 200, в базе 20 данных, и процесс указания информации об искусственной неровности, определяющий информацию об искусственной неровности как информацию о движении.
[0061]
Процессор 11 выполняет каждую из вышеупомянутых функций посредством взаимодействия программного обеспечения для реализации каждой функции или для выполнения каждого процесса и вышеописанного аппаратного обеспечения.
[0062]
Сначала будет описан процесс сохранения информации о прохождении искусственной неровности.
Процессор 11 сохраняет историю движения, которая включает в себя информацию о прохождении искусственной неровности, введенную из серверного устройства 40 связи, в базе 20 данных. При получении истории движения от множества транспортных средств процессор 11 сохраняет истории движения в базе 20 данных для каждого транспортного средства.
[0063]
Ниже будет описан процесс указания информации об искусственной неровности.
На основании множества элементов информации о прохождении искусственных неровностей, сохранённых в базе 20 данных процессор 11 определяет положение искусственной неровности и информацию о скорости транспортного средства, информацию об операции торможения и информацию об операции ускорения, которые связаны с положением искусственной неровности, в качестве информации об искусственных неровностях.
[0064]
Сначала процессор 11 извлекает информацию о прохождении искусственной неровности, включающую в себя информацию об участке для той же полосы движения, из элементов информации о прохождении искусственной неровности, сохранённых в базе 20 данных. Информация об участке для полосы движения различается на основании идентификатора участка, определенного в дорожной информации 233. Например, процессор 11 извлекает из базы 20 данных информацию о прохождении искусственных неровностей, включающую в себя тот же идентификатор участка.
[0065]
Затем для сохранения положения искусственной неровности в запоминающем устройстве 30 в качестве информации о движении, процессор 11 указывает положение искусственной неровности из информации о положении искусственной неровности, включенной в извлеченную информацию о прохождении искусственной неровности. Например, когда в извлеченную информацию о прохождении искусственных неровностей входит множество элементов информации о положениях искусственных неровностей, процессор 11 выполняет процесс кластеризации. Примером процесса кластеризации является метод K–средних. Например, процессор 11 классифицирует искусственные неровности на две или более групп из координат (широты и долготы) множества искусственных неровностей. Процессор 11 группирует множество искусственных неровностей таким образом, чтобы расстояния между искусственными неровностями находились в пределах заданного расстояния. Заданное расстояние предпочтительно представляет собой расстояние, получаемое экспериментальным путем. Например, заданное расстояние может представлять собой расстояние около 3 м.
[0066]
Процессор 11 указывает положения искусственных неровностей для каждой группы. Способы указания положений искусственных неровностей конкретно не ограничены. Например, когда две или более искусственных неровности включены в одну группу, процессор 11 может усреднить координаты (широту и долготу) двух или более искусственных неровностей и указать положение репрезентативной искусственной неровности как одну искусственную неровность. В качестве дополнения или альтернативы, процессор 11 может рассматривать координаты двух или более искусственных неровностей как распределение, вычислять медианные координаты распределения, чтобы объединить две или более искусственных неровности в одну искусственную неровность, и указывать положение объединённой искусственной неровности. В качестве дополнения или альтернативы, когда два или более скачков скорости последовательно присутствуют в пределах заданного расстояния, например, процессор 11 может вычислять среднее значение координат двух или более последовательных искусственных неровностей, чтобы объединить две или более последовательных искусственных неровности в одну искусственную неровность.
[0067]
После указания положения одной искусственной неровности для каждой группы процессор 11 указывает информацию о скорости транспортного средства, информацию об операции торможения и информацию об операции ускорения, которые соответствуют указанной искусственной неровности. Процесс кластеризации может быть проиллюстрирован в качестве способа указания этих элементов информации. Например, процессор 11 извлекает информацию о прохождении искусственных неровностей, которая включает в себя положение указанной искусственной неровности, из базы 20 данных и группирует извлеченную информацию о прохождении искусственных неровностей для каждого элемента информации, отличного от упомянутого положения искусственной неровности. Затем процессор 11 определяет каждый элемент информации для каждой группы, чтобы сохранить его в запоминающем устройстве 30 в качестве информации о движении.
[0068]
Например, процессор 11 выполняет процесс кластеризации в отношении скоростей транспортного средства в момент прохождения искусственной неровности и, таким образом, может указывать скорость транспортного средства в момент времени прохождения искусственной неровности. Термин «вокруг искусственной неровности» относится, например, к области, определяемой расстоянием в 10 метров впереди искусственной неровности и позади неё.
[0069]
Процессор 11 выполняет процесс кластеризации в отношении скоростей транспортного средства до и после искусственной неровности и, таким образом, может указывать скорость транспортного средства вокруг искусственной неровности (например, в области, определяемой расстоянием 10 м впереди искусственной неровности и позади неё). В качестве дополнения или альтернативы, например, процессор 11 выполняет процесс кластеризации для операций торможения перед прохождением искусственной неровности, и таким образом может указывать положение, в котором выполняется операция торможения перед прохождением искусственной неровности. В качестве дополнения или альтернативы, например, процессор 11 выполняет процесс кластеризации для операций ускорения после прохождения искусственной неровности и, таким образом, может указывать положение, в котором выполняется операция ускорения после прохождения искусственной неровности.
[0070]
Хотя способы указания информации о скорости транспортного средства, информации об операции торможения и информации об операции ускорения процессором 11 конкретно не ограничены, способ указания информации о скорости транспортного средства в момент времени, когда оно проходит искусственную неровность, будет описан в качестве примера. Например, набор скоростей транспортного средства, включенных во множество элементов информации о прохождении искусственной неровности, может быть усреднен и указан в качестве информации о скорости транспортного средства. В качестве дополнения или альтернативы, набор скоростей транспортного средства может рассматриваться как распределение, а скорость транспортного средства, соответствующая центру распределения, может быть указана в качестве информации о скорости транспортного средства. В качестве дополнения или альтернативы, может быть выполнена статистическая обработка для вычисления среднего значения, дисперсии, стандартного отклонения и т.п. для распределения скорости транспортного средства, и, если имеет место отклонение относительно среднего значения, информация о прохождении искусственной неровности, включающая в себя скорость транспортного средства, может быть предварительно исключена в качестве выброса перед указанием информации о скорости транспортного средства.
[0071]
После указания информации о скорости транспортного средства, информации об операции торможения и информации об операции ускорения, соответствующей одной искусственной неровности, процессор 11 связывает информацию об искусственной неровности с картографической информацией 232. В частности, процессор 11 связывает информацию об участке для искусственной неровности с информацией об участке в картографической информации 232. Например, когда искусственная неровность имеется в точке, находящейся в нескольких метрах от положения начала участка, процессор 11 связывает информацию о положении искусственной неровности с соответствующей точкой на участке, тем самым связывая информацию об искусственной неровности с картографической информацией 232. Это позволяет включать в картографическую информацию 232 положение искусственной неровности и информацию о скорости транспортного средства, операции торможения и операции ускорения при прохождении искусственной неровности, которые связаны с участком дороги. Затем процессор 11 сохраняет картографическую информацию 232, связанную с информацией об искусственной неровности, в запоминающем устройстве 30.
[0072]
Предполагая, что информация об искусственной неровности применяется в качестве информации о движении в способе управления транспортным средством, которое движется автономно, процессор 11 может выполнять процесс выбора в отношении информации о прохождении искусственной неровности перед указанием информации об искусственной неровности. Примером критериев выбора может быть то, является ли транспортное средство транспортным средством, которое движется с сохранением скорости транспортного средства в заданном диапазоне относительно разрешённой скорости.
[0073]
Транспортное средство, которое движется в области без искусственных неровностей со скоростью транспортного средства не менее заданной пороговой величины по отношению к разрешённой скорости, может проходить искусственную неровность со скоростью транспортного средства, превышающей скорость транспортного средства для средних транспортных средств. На основании точки зрения, что не является предпочтительным применение способа управления для такого транспортного средства к способу управления для транспортного средства, которое движется автономно, процессор 11 выполняет процесс выбора в отношении информации о прохождении искусственной неровности.
[0074]
Например, процессор 11 извлекает все идентификаторы транспортного средства из информации о прохождении искусственной неровности, сгруппированной в процессе кластеризации, и получает историю движения, соответствующую каждому извлеченному идентификатору транспортного средства, из базы 20 данных. Затем процессор 11 обращается к информации о скорости транспортного средства, включенной в историю движения, и к положению искусственной неровности для каждого транспортного средства, и указывает скорость транспортного средства в области без искусственных неровностей. Когда указанная скорость транспортного средства сохраняется в заданном диапазоне относительно разрешённой скорости на дороге, включенной в базу 20 данных, процессор 11 определяет, что водитель, управляющий транспортным средством с упомянутым идентификатором транспортного средства, является хорошим водителем. С другой стороны, когда разность между разрешённой скоростью на дороге, включенной в базу 20 данных, и указанной скоростью транспортного средства не меньше заданной скорости транспортного средства, процессор 11 определяет, что водитель, управляющий транспортным средством с упомянутым идентификатором транспортного средства, не является хорошим водителем. Затем процессор 11 предварительно исключает информацию о прохождении искусственной неровности, включающую в себя соответствующий идентификатор транспортного средства, перед вычислением информации об искусственной неровности. Способы извлечения информации о прохождении искусственной неровности, связанные с хорошим водителем, не ограничены вышеописанным способом.
[0075]
Фиг.2 – блок–схема, иллюстрирующая процедуру управления, выполняемую системой получения информации о движении согласно настоящему варианту осуществления. Процесс управления получением информации о движении по настоящему варианту осуществления будет описан со ссылкой на блок–схему по фиг. 2. Процесс управления получением информации о движении, описанный ниже, многократно выполняется с заданными временными интервалами и для каждой полосы движения.
[0076]
На этапе S101 процессор 11 получает информацию о прохождении искусственной неровности, включающую в себя ту же информацию о том же участке, из элементов информации о прохождении искусственной неровности, сохранённых в базе 20 данных.
[0077]
На этапе S102 процессор 11 выполняет процесс кластеризации в отношении положений искусственных неровностей из информации о прохождении искусственной неровности, полученной на этапе S101, и указывает положения одной или более искусственных неровностей, присутствующих в одной и той же полосе движения. Например, когда имеется две или более искусственных неровности, процессор 11 группирует информацию о прохождении искусственных неровностей таким образом, что положения искусственных неровностей находятся в пределах заданного расстояния. Затем процессор 11 вычисляет среднее значение координат (широту и долготу) искусственных неровностей для каждой группы, тем самым объединяя две или более искусственных неровности, присутствующих в одной полосе движения, в одну искусственную неровность.
[0078]
На этапе S103 для каждой искусственной неровности, указанной на этапе S102, процессор 11 выполняет процесс кластеризации в отношении скоростей транспортного средства или тому подобного в момент времени прохождения искусственной неровности для указания информации об искусственной неровности. Например, процессор 11 вычисляет среднее значение скоростей транспортного средства в момент времени прохождения искусственной неровности, который включен в информацию о прохождении искусственной неровности, для указания информации о скорости транспортного средства для данной искусственной неровности. Процессор 11 выполняет процесс кластеризации также в отношении скоростей транспортного средства, операций торможения и операций ускорения до и после прохождения искусственной неровности и, таким образом, указывает информацию о скорости транспортного средства, информацию об операции торможения и информацию об операции ускорения до и после прохождения определённого искусственной неровности.
[0079]
На этапе S104 процессор 11 сохраняет информацию о положении искусственной неровности, которая указана на этапе S102, и информацию о скорости транспортного средства для искусственной неровности, информацию об операции торможения для искусственной неровности и информацию об операции ускорения для искусственной неровности, которая указана на этапе S103, в запоминающем устройстве 30 в качестве информации об ускорении, и процесс получения информации о движении таким образом завершается. Процессор 11 сохраняет информацию об искусственной неровности в запоминающем устройстве 30 таким образом, чтобы она была связана с картографической информацией 232.
[0080]
Как описано выше, бортовое устройство 200 по настоящему варианту осуществления включает в себя контроллер 210 транспортного средства, устройство 220 обнаружения, которое обнаруживает состояние движения рассматриваемого транспортного средства, навигационное устройство 230, которое обнаруживает положение движения рассматриваемого транспортного средства, и бортовое устройство 260 связи. Контроллер 210 транспортного средства получает состояние движения рассматриваемого транспортного средства от устройства 220 обнаружения и получает положение движения рассматриваемого транспортного средства от навигационного устройства 230. Затем контроллер 210 транспортного средства определяет, прошло ли рассматриваемое транспортное средство искусственную неровность, на основании состояния движения рассматриваемого транспортного средства и передает историю движения, которая включает в себя результат определения и состояние движения рассматриваемого транспортного средства, на сервер 100 через бортовое устройство 260 связи. На сервере 100 устройство 10 управления указывает информацию о положении искусственной неровности и информацию о скорости транспортного средства для транспортного средства при прохождении искусственной неровности в качестве информации об искусственной неровности из истории движения, переданной от бортового устройства 200. Затем устройство 10 управления сохраняет указанную информацию об искусственной неровности в запоминающем устройстве 30. Это позволяет запоминающему устройству 30 хранить информацию об искусственной неровности, при которой может быть выполнено соответствующее управление в соответствии с формой искусственной неровности. В результате информация об искусственной неровности, сохраненная в запоминающем устройстве 30, может использоваться для выполнения соответствующего управления в соответствии с формой искусственной неровности.
[0081]
Кроме того, в сервере 100 по настоящему варианту осуществления устройство 10 управления сохраняет информацию об искусственной неровности в запоминающем устройстве 30 таким образом, чтобы она была связана с картографической информацией 232. Посредством этой операции информация, относящаяся к искусственной неровности, присутствующей на маршруте движения рассматриваемого транспортного средства, может быть заранее получена посредством простого процесса обращения к картографической информации 232.
[0082]
Кроме того, на сервере 100 по настоящему варианту осуществления устройство 10 управления получает историю движения, которая включает в себя информацию о прохождении искусственной неровности, дважды или более от одного транспортного средства. Посредством этой операции, даже когда неровность дороги, временно существующая из–за строительства дороги или временно присутствующего упавшего объекта, ошибочно определяется как искусственная неровность в конкретную дату и время, может быть обнаружено ошибочное определение. В результате запоминающее устройство 30 может хранить очень точную информацию об искусственной неровности.
[0083]
Кроме того, на сервере 100 по настоящему варианту осуществления устройство 10 управления получает истории движения, включающие в себя информацию о прохождении искусственных неровностей, от множества транспортных средств. Это позволяет запоминающему устройству 30 сохранять информацию об искусственной неровности как данные общего назначения, а не как данные, зависящие от способа управления для конкретного водителя.
[0084]
Кроме того, в бортовом устройстве 200 по настоящему варианту осуществления контроллер 210 транспортного средства обнаруживает возмущение, действующее на передние и задние колеса рассматриваемого транспортного средства, и возмущение, действующее на правое и левое колеса рассматриваемого транспортного средства, на основании результата обнаружения от устройства 220 обнаружения. Затем контроллер 210 транспортного средства определяет, прошло ли рассматриваемое транспортное средство искусственную неровность, на основании обнаруженного возмущения, действующего на передние и задние колеса, и обнаруженного возмущения, действующего на правое и левое колеса. Это уменьшает определение углубления на дороге или упавшего объекта в качестве искусственной неровности, и в результате запоминающее устройство 30 может хранить очень точную информацию об искусственной неровности.
[0085]
Кроме того, в бортовом устройстве 200 по настоящему варианту осуществления контроллер 210 транспортного средства определяет, прошло ли транспортное средство возможную искусственную неровность, на основании возмущения, действующего на передние и задние колеса рассматриваемого транспортного средства, и когда между соответствующими возмущениями, действующими на правое и левое колеса, возникает разность не менее заданной пороговой величины, контроллер 210 транспортного средства не определяет возможную искусственную неровность в качестве искусственной неровности. Это позволяет запоминающему устройству 30 хранить очень точную информацию об искусственной неровности, как описано выше.
[0086]
Кроме того, бортовое устройство 200 по настоящему варианту осуществления включает в себя устройство 240 обнаружения объектов, которое обнаруживает объект, присутствующий в окружении рассматриваемого транспортного средства. Контроллер 210 транспортного средства определяет, влияет ли объект, обнаруженный устройством 240 обнаружения объектов, на скорость транспортного средства для рассматриваемого транспортного средства, и только когда объект, который не влияет на скорость транспортного средства для рассматриваемого транспортного средства, присутствует в окружении рассматриваемого транспортного средства, контроллер 210 транспортного средства определяет, прошло ли рассматриваемое транспортное средство искусственную неровность. За счёт этой операции информация о скорости транспортного средства, указанная на стороне сервера 100, не включает в себя информацию о скорости транспортного средства, на которое воздействует объект, и, следовательно, запоминающее устройство 30 может сохранять информацию о скорости транспортного средства, подходящую для движения, для прохождения искусственной неровности.
[0087]
Кроме того, в бортовом устройстве 200 по настоящему варианту осуществления объект, обнаруженный устройством 220 обнаружения, является движущимся впереди транспортным средством. Таким образом, информация о скорости транспортного средства, указанная на стороне сервера 100, не включает в себя информацию о скорости транспортного средства, на которое воздействует движущееся впереди транспортное средство, и поэтому запоминающее устройство 30 может сохранять информацию о скорости транспортного средства, подходящую для движения, для прохождения искусственной неровности.
[0088]
Кроме того, в бортовом устройстве 200 по настоящему варианту осуществления датчик 222 скорости транспортного средства устройства 220 обнаружения определяет скорость транспортного средства для рассматриваемого транспортного средства. Когда скорость транспортного средства для рассматриваемого транспортного средства не превышает заданную скорость в пределах заданного расстояния в продольном направлении рассматриваемого транспортного средства по отношению к точке, в которой обнаружено возмущение, действующее на передние и задние колеса рассматриваемого транспортного средства, контроллер 210 транспортного средства определяет, что рассматриваемое транспортное средство прошло искусственную неровность. Это позволяет проводить различие между искусственной неровностью, который вызывает замедление, и неровностью в виде дорожного соединения или препятствия, которое не вызывает замедления.
[0089]
Кроме того, в бортовом устройстве 200 по настоящему варианту осуществления устройство 250 ввода обнаруживает операцию ускорения и торможения рассматриваемого транспортного средства. Когда операция торможения выполняется в пределах заданного расстояния с задней стороны рассматриваемого транспортного средства по отношению к точке, в которой обнаружено возмущение, действующее на передние и задние колеса рассматриваемого транспортного средства, или когда операция ускорения выполняется в пределах заданного расстояния с передней стороны рассматриваемого транспортного средства по отношению к этой точке, контроллер 210 транспортного средства определяет, что рассматриваемое транспортное средство прошло искусственную неровность. Это повышает точность обнаружения искусственных неровностей, и запоминающее устройство 30 может сохранять очень точную информацию об искусственных неровностях.
[0090]
Кроме того, в настоящем варианте осуществления информация об искусственной неровности включает в себя информацию об операции ускорения и информацию об операции торможения, которые связаны с информацией о положении искусственной неровности. Это позволяет запоминающему устройству 30 хранить информацию, подходящую для фактической операции управления для прохождения искусственной неровности, в качестве информации об искусственной неровности.
[0091]
Кроме того, на сервере 100 по настоящему варианту осуществления устройство 10 управления извлекает историю движения транспортного средства, которое движется, при этом сохраняя скорость транспортного средства в пределах заданного диапазона по отношению к разрешённой скорости, из числа историй движения множества транспортных средств, и указывает информацию об искусственной неровности на основании извлеченной истории движения. Это позволяет запоминающему устройству 30 сохранять операцию управления, выполненную хорошим водителем, который соблюдает разрешённую скорость для прохождения искусственной неровности, в качестве информации об искусственной неровности.
[0092]
Кроме того, на сервере 100 по настоящему варианту осуществления при обнаружении множества искусственных неровностей в пределах заданного расстояния на карте устройство 10 управления объединяет обнаруженное множество искусственных неровностей в одну искусственную неровность, чтобы таким образом указать положение искусственной неровности. Посредством этой операции, когда имеется две или более последовательных искусственных неровностей, они могут рассматриваться как одна искусственная неровность, и могут быть исключены сложные операции при обращении к информации об искусственных неровностях.
[0093]
«Второй вариант осуществления»
Нижеследующее описание приведено для системы 2 управления движением транспортного средства, выполненной с возможностью управления движением транспортного средства с использованием информации об искусственной неровности, полученной системой 1 получения информации о движении согласно вышеописанному варианту осуществления.
[0094]
Фиг. 3 является схемой, иллюстрирующей конфигурацию блоков системы 2 управления движением транспортного средства. Система 2 управления движением транспортного средства по настоящему варианту осуществления включает в себя бортовое устройство 300.
[0095]
Бортовое устройство 300 по настоящему варианту осуществления имеет ту же конфигурацию, что и бортовое устройство 200 по вышеописанному варианту осуществления, за исключением того, что бортовое устройство 300 включает в себя контроллер 310 транспортного средства, устройство 330 привода, тормозное устройство 331, устройство 340 рулевого управления и запоминающее устройство 30, и не включает в себя устройство 250 ввода и бортовое устройство 260 связи, поэтому описание вышеописанного варианта осуществления с использованием фиг. 1 будет учтено здесь.
[0096]
Бортовое устройство 300 по настоящему варианту осуществления включает в себя контроллер 310 транспортного средства, навигационное устройство 230, устройство 240 обнаружения объектов, устройство 320 обнаружения, устройство 330 привода, устройство 340 рулевого управления и запоминающее устройство 30. Эти устройства, которые составляют бортовое устройство 300, соединены друг с другом через локальную сеть контроллеров (CAN) или другую бортовую локальную сеть для взаимного обмена информацией. Контроллер 310 транспортного средства управляет устройством 330 привода и устройством 340 рулевого управления на основании информации об ускорении, сохраненной в запоминающем устройстве 30, и маршрута движения, вычисленного навигационным устройством 230.
[0097]
Бортовое устройство 300 по настоящему варианту осуществления включает в себя устройство 320 обнаружения. Устройство 320 обнаружения по настоящему варианту осуществления имеет ту же конфигурацию, что и устройство 220 обнаружения по вышеописанному варианту осуществления, за исключением того, что устройство 320 обнаружения включает в себя датчик 324 угла поворота рулевого колеса, поэтому описание вышеописанного варианта осуществления с использованием фиг. 1 будет учтено здесь. Датчик 324 угла поворота рулевого колеса обнаруживает информацию, такую как величина рулевого управления, скорость рулевого управления и ускорение рулевого управления, и выводит информацию на контроллер 310 транспортного средства.
[0098]
Контроллер 310 транспортного средства по настоящему варианту осуществления представляет собой бортовой компьютер, такой как электронный блок управления (ECU), и электронным образом управляет движением транспортного средства. Примеры транспортного средства включают в себя электромобиль, механическое транспортное средство и гибридное транспортное средство, как описано выше.
[0099]
Контроллер 310 транспортного средства по настоящему варианту осуществления выполняет процесс формирования маршрута для вычисления целевой скорости в каждой точке маршрута движения и процесс коррекции целевой скорости транспортного средства для коррекции целевой скорости транспортного средства.
[0100]
Первым будет описан процесс формирования маршрута.
Контроллер 310 транспортного средства вычисляет целевую скорость транспортного средства в каждой точке маршрута движения, вычисленного навигационным устройством 230, в качестве профиля скорости. Профиль скорости транспортного средства относится к целевому значению скорости транспортного средства в каждом положении на маршруте движения. Например, сначала контроллер 310 транспортного средства корректирует маршрут движения, вычисленный навигационным устройством 230, на основании обстановки вокруг транспортного средства, обнаруженной устройством 240 обнаружения объектов. Затем контроллер 310 транспортного средства вычисляет целевую скорость транспортного средства в каждой точке на скорректированном маршруте движения в качестве профиля скорости. Способы для процесса формирования маршрута не ограничены вышеописанным способом, и контроллер 310 транспортного средства может надлежащим образом использовать процесс формирования маршрута, известный на момент подачи настоящей заявки.
[0101]
Далее будет описан процесс коррекции целевой скорости транспортного средства.
Контроллер 310 транспортного средства корректирует профиль скорости, сформированный процессом формирования маршрута, на основании информации об искусственной неровности, сохраненной в запоминающем устройстве 30. Например, контроллер 310 транспортного средства получает информацию об искусственной неровности от запоминающего устройства 30 для каждой полосы движения, включенной в маршрут движения. Затем контроллер 310 транспортного средства сравнивает для того же участка целевую скорость транспортного средства, вычисленную в качестве профиля скорости, со скоростью транспортного средства, включенной в информацию об искусственной неровности, и определяет, следует ли корректировать целевую скорость транспортного средства, в соответствии с результатом сравнения. Когда целевая скорость транспортного средства выше скорости транспортного средства в информации об искусственной неровности, контроллер 310 транспортного средства корректирует целевую скорость транспортного средства до скорости, не превышающей скорость транспортного средства в информации об искусственной неровности. С другой стороны, когда целевая скорость транспортного средства ниже скорости транспортного средства в информации об искусственной неровности, контроллер 310 транспортного средства не корректирует целевую скорость транспортного средства. Таким образом, целевая скорость транспортного средства устанавливается ниже скорости транспортного средства, включенной в информацию об искусственной неровности, и таким образом может быть выполнено соответствующее управление движением при прохождении искусственной неровности.
[0102]
Устройство 330 привода по настоящему варианту осуществления включает в себя приводной механизм рассматриваемого транспортного средства. Приводной механизм включает в себя электродвигатель и/или двигатель внутреннего сгорания в качестве источников движущей силы при движении, устройство передачи мощности, включающее в себя приводной вал и автоматическую коробку передач, которые передают выходную мощность от источника или источников движущей силы при движении на ведущие колеса, тормозное устройство 331, которое тормозит колеса и другие необходимые компоненты. Устройство 330 привода выполняет управление движением, которое включает в себя ускорение и замедление транспортного средства, посредством формирования управляющих сигналов для этих компонентов приводного механизма на основании входных сигналов при операции ускорения и операции торможения, а также управляющих сигналов, полученных от контроллера 310 транспортного средства. Управление движением, включающее в себя ускорение и замедление транспортного средства, может выполняться автономно путем передачи управляющей информации на устройство 330 привода. В случае гибридного транспортного средства отношение выходного крутящего момента на электродвигателе и выходного крутящего момента на двигателе внутреннего сгорания в соответствии с состоянием движения транспортного средства также передается на устройство 330 привода.
[0103]
Рулевое устройство 340 по настоящему варианту осуществления включает в себя привод рулевого управления. Привод рулевого управления включает в себя двигатель и другие необходимые компоненты, соединенные с валом рулевой колонки. Устройство 340 рулевого управления выполняет управление изменением направления движения транспортного средства на основании управляющих сигналов, полученных от контроллера 310 транспортного средства, или входных сигналов от операции рулевого управления. Контроллер 310 транспортного средства передает управляющую информацию, которая включает в себя величину рулевого управления, на устройство 340 рулевого управления, чтобы таким образом выполнять управление рулевым управлением рассматриваемого транспортного средства таким образом, чтобы рассматриваемое транспортное средство двигалось по маршруту движения. В качестве дополнения или альтернативы, контроллер 310 транспортного средства может выполнять управление направлением движения транспортного средства посредством управления величиной торможения для каждого колеса транспортного средства. В этом случае контроллер 310 транспортного средства передает управляющую информацию, которая включает в себя величину торможения для каждого колеса, в тормозное устройство 331, чтобы таким образом выполнять управление направлением движения транспортного средства. Управление устройством 330 привода и/или управление устройством 340 рулевого управления может выполняться полностью автономно или в качестве помощи в операции управления (операции движения) для водителя. Управление устройством 330 привода и управление устройством 340 рулевого управления могут быть приостановлены/отменены операцией вмешательства водителя.
[0104]
Фиг.4 – блок–схема, иллюстрирующая процедуру управления, выполняемую системой управления движением транспортного средства согласно настоящему варианту осуществления. Процесс управления системой управления движением транспортного средства по настоящему варианту осуществления будет описан со ссылкой на блок–схему по фиг. 4. Процесс управления системой управления движением транспортного средства, описанный ниже, многократно выполняется с заданными временными интервалами.
[0105]
На этапе S201 навигационное устройство 230 определяет маршрут движения, по которому движется рассматриваемое транспортное средство, на основании текущего положения рассматриваемого транспортного средства, обнаруженной устройством 231 обнаружения положения.
[0106]
На этапе S202 навигационное устройство 230 обращается к дорожной информации 233 для указания участка дороги для каждой полосы движения маршрута движения, по которому движется рассматриваемое транспортное средство. Навигационное устройство 230 передает маршрут движения, включающий в себя указанный участок дороги, на контроллер 310 транспортного средства.
[0107]
На этапе S203 контроллер 310 транспортного средства корректирует маршрут движения, который определен на этапе S201, на основании участка дороги для полосы движения, указанного на этапе S202, и обстановки вокруг транспортного средства, обнаруженной устройством 240 обнаружения объектов, и вычисляет профиль скорости транспортного средства на скорректированном маршруте движения.
[0108]
На этапе S204 контроллер 310 транспортного средства получает информацию об искусственной неровности, сохраненную в запоминающем устройстве 30. В настоящем варианте осуществления информация об искусственной неровности включает в себя по меньшей мере информацию о положении искусственной неровности и информацию о скорости транспортного средства, соответствующую информации о положении искусственной неровности.
[0109]
На этапе S205 контроллер 310 транспортного средства корректирует профиль скорости транспортного средства, который вычислен на этапе S203, на основании информации об искусственной неровности, полученной на этапе S204. Например, контроллер 310 транспортного средства извлекает информацию об искусственных неровностях, включая участок дороги для маршрута движения, из элементов информации об искусственных неровностях. Затем контроллер 310 транспортного средства сравнивает скорость транспортного средства, включенную в извлеченную информацию об искусственной неровности, с целевой скоростью транспортного средства в профиле скорости транспортного средства, чтобы определить, следует ли корректировать целевую скорость транспортного средства. Когда целевая скорость транспортного средства не ниже скорости транспортного средства, включенной в информацию об искусственной неровности, контроллер 310 транспортного средства корректирует целевую скорость транспортного средства до скорости, которая не превышает скорость транспортного средства, включенную в информацию об искусственной неровности. С другой стороны, когда целевая скорость транспортного средства ниже скорости транспортного средства, включенной в информацию об искусственной неровности, контроллер 310 транспортного средства не корректирует целевую скорость транспортного средства.
[0110]
На этапе S206 контроллер 310 транспортного средства выполняет процесс следования маршруту движения на основании маршрута движения, скорректированного на этапе S203, и профиля скорости, скорректированного на этапе S205. Например, контроллер 310 транспортного средства формирует команду для управления устройством 340 рулевого управления или тормозным устройством 331 (например, команду для управления величиной рулевого управления для рулевого управления или величиной торможения для каждого колеса) и команду для управления устройством 330 привода (например, команду для управления скоростью транспортного средства и/или ускорением). Затем контроллер 310 транспортного средства выводит сформированные команды на соответствующие устройства, и процесс управления движением таким образом завершается. Способы для процесса следования по маршруту движения, выполняемого контроллером 310 транспортного средства, не ограничены вышеописанным способом, и может быть надлежащим образом использован способ следования по маршруту движения, известный на момент подачи настоящей заявки.
[0111]
Как описано выше, бортовое устройство 300 по настоящему варианту осуществления включает в себя контроллер 310 транспортного средства, который управляет автономным управлением транспортного средства, и запоминающее устройство 30, в котором хранится информация об искусственных неровностях. Контроллер 310 транспортного средства вычисляет целевую скорость транспортного средства при прохождении искусственной неровности на основании информации об искусственной неровности, сохраненной в запоминающем устройстве 30, и управляет движением транспортного средства. Это позволяет транспортному средству, движущемуся в автономном режиме, заранее снизить скорость до соответствующей скорости транспортного средства в соответствии с формой искусственной неровности при прохождении искусственной неровности, и таким образом может быть выполнено соответствующее движение в соответствии с формой искусственной неровности.
[0112]
Варианты осуществления, описанные выше, описаны для облегчения понимания настоящего изобретения и не описаны для ограничения настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеприведённых вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, находящиеся в рамках технического объема настоящего изобретения.
[0113]
Например, в вышеописанном первом варианте осуществления процессор 11 сервера 100 может выполнять процесс обновления искусственной неровности для обновления информации об искусственных неровностях, сохраненной в запоминающем устройстве 30. В частности, при определении того, что информация об искусственной неровности, сохраненная в запоминающем устройстве 30, является неточной информацией, процессор 11 удаляет определенную информацию об искусственной неровности из запоминающего устройства 30.
[0114]
Например, процессор 11 получает информацию об искусственной неровности, которая сохранена в запоминающем устройстве 30, с заданными интервалами, а также получает истории движения множества транспортных средств, которые наиболее недавно двигались по полосе движения, включенной в полученную информацию об искусственной неровности. Затем процессор 11 выполняет процесс кластеризации информации о прохождении искусственной неровности, включенной в истории движения, и обнаруживает положение искусственной неровности. Если обнаруженное положение искусственной неровности не совпадает с положением, сохраненным в качестве информации об искусственной неровности, или когда положение искусственной неровности не обнаружено, процессор 11 определяет, что информация об искусственной неровности является неточной. Затем процессор 11 удаляет соответствующую информацию об искусственной неровности из запоминающего устройства 30. Это позволяет запоминающему устройству 30 сохранять информацию об искусственной неровности в соответствии с наиболее недавним состоянием дороги, даже когда искусственная неровность удалена из–за строительства дороги или тому подобного.
[0115]
В вышеописанном втором варианте осуществления, например, информация об искусственной неровности, сохранённая в запоминающем устройстве 30, используется для формирования профиля скорости транспортного средства, движущегося автономно, но способы использования информации об искусственной неровности не ограничены этим. Примеры способа использования информации об искусственной неровности включают в себя использование для помощи при вождении и использование для оценки поведения другого транспортного средства.
[0116]
Будет описано использование информации об искусственной неровности для помощи при вождении. Например, в случае транспортного средства, которое движется посредством ручного управления водителя, информация об искусственной неровности может быть применена в навигационном устройстве 230. Путём обращения к информации об ударе скорости, навигационное устройство 230 может обеспечивать информацию, которая подсказывает водителю заранее снизить скорость в соответствии со скоростью транспортного средства для рассматриваемого транспортного средства, прежде чем транспортное средство достигнет искусственной неровности. В этом случае контроллер 310 транспортного средства сравнивает скорость транспортного средства для рассматриваемого транспортного средства со скоростью транспортного средства, включенной в информацию об искусственной неровности, перед тем, как рассматриваемое транспортное средство приблизится к искусственной неровности. Когда скорость транспортного средства для рассматриваемого транспортного средства выше скорости транспортного средства, включенной в информацию об искусственной неровности, контроллер 310 транспортного средства может подсказать водителю замедлить движение через устройство вывода, включающее в себя дисплей и/или громкоговоритель.
[0117]
Далее будет описано использование информации об искусственной неровности для оценки поведения другого транспортного средства. Например, в случае транспортного средства, которое движется автономно, поведение другого транспортного средства может оцениваться в соответствии с положением искусственной неровности, включенным в информацию об искусственной неровности, и информацией о скорости транспортного средства, соответствующей этому положению. В этом случае контроллер 310 транспортного средства получает информацию о положении другого транспортного средства от устройства 240 обнаружения объектов, и когда оценивается, что другое транспортное средство проходит положение искусственной неровности, включенное в информацию об искусственной неровности, контроллер 310 транспортного средства определяет, что другое транспортное средство замедлится. Затем с учетом поведения другого транспортного средства в зависимости от скорости можно управлять маршрутом движения, скоростью транспортного средства и т.п. для рассматриваемого транспортного средства.
[0118]
В настоящем описании описано устройство для хранения информации транспортного средства в соответствии с настоящим изобретением посредством использования в качестве примера конфигурации сервера 100 и контроллера 210 транспортного средства бортового устройства 200, которые составляют систему 1 получения информации о движении, но настоящее изобретение не ограничено этим. Например, бортовое устройство 200 может включать в себя устройство 10 управления, базу 20 данных и запоминающее устройство 30, которые включены в сервер 100.
[0119]
В настоящем варианте осуществления возможная искусственная неровность в соответствии с настоящим изобретением описана путём использования в качестве примера возможной искусственной неровности, но настоящее изобретение не ограничено этим.
[0120]
В настоящем описании устройство управления движением для транспортного средства в соответствии с настоящим изобретением описано с использованием в качестве примера бортового устройства 300, которое составляет систему 2 управления движением транспортного средства, но настоящее изобретение не ограничено этим. Например, сервер может включать в себя запоминающее устройство 30, а бортовое устройство 300 и сервер могут обмениваться информацией об искусственных неровностях посредством связи.
[Описание ссылочных позиций]
[0121]
1 Система получения информации о движении
100 Сервер
10 Устройство управления
11 Процессор
20 База данных
30 Запоминающее устройство
40 Серверное устройство связи
200 Бортовое устройство
210 Контроллер транспортного средства
220 Устройство обнаружения
221 Датчик скорости вращения колеса
222 Датчик скорости транспортного средства
223 Датчик ориентации
230 Навигационное устройство
231 Устройство обнаружения положения
232 Картографическая информация
233 Дорожная информация
240 Устройство обнаружения объектов
241 Камера
242 Радарное устройство
250 Устройство ввода
251 Педаль тормоза
252 Педаль акселератора

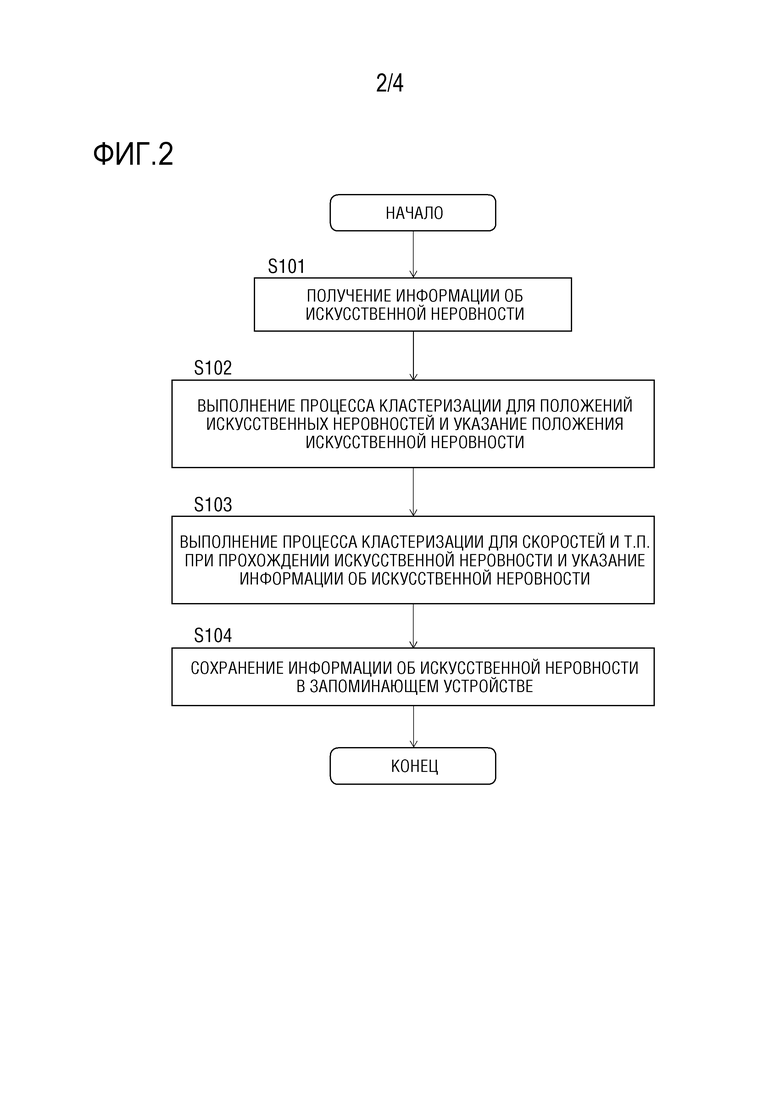


Изобретение относится к способу и устройству хранения информации транспортного средства. Способ хранения информации для транспортного средства содержит этапы, на которых получают результат обнаружения от датчика, выполненного с возможностью обнаружения положения транспортного средства и состояния движения транспортного средства, обнаруживают возмущение, определяют, прошло ли транспортное средство искусственную неровность, на основании возмущения, получают историю движения транспортного средства. При этом история движения включает в себя результат определения того, прошло ли транспортное средство искусственную неровность, и результат обнаружения от датчика, указывают из истории движения информацию о положении искусственной неровности и информации о скорости транспортного средства для транспортного средства при прохождении искусственной неровности и сохраняют информацию об искусственной неровности в запоминающем устройстве. Устройство для хранения информации для транспортного средства содержит процессор, выполненный с возможностью выполнения обработки информации, и запоминающее устройство, выполненное с возможностью сохранения результата выполнения процессором. Достигается своевременно определение искусственных неровностей. 3 н. и 13 з.п. ф-лы, 4 ил.
1. Способ хранения информации для транспортного средства, причем в способе используется процессор для выполнения обработки информации и сохранения результата выполнения в запоминающем устройстве, причем способ содержит этапы, на которых:
получают результат обнаружения от датчика, выполненного с возможностью обнаружения положения транспортного средства и состояния движения транспортного средства;
обнаруживают возмущение, действующее на правое и левое колеса транспортного средства, на основании состояния движения транспортного средства;
определяют, прошло ли транспортное средство искусственную неровность, на основании возмущения, действующего на правое и левое колеса;
получают историю движения транспортного средства, при этом история движения включает в себя результат определения того, прошло ли транспортное средство искусственную неровность, и результат обнаружения от датчика;
указывают из истории движения информацию о положении искусственной неровности и информации о скорости транспортного средства для транспортного средства при прохождении искусственной неровности в качестве информации об искусственной неровности; и
сохраняют информацию об искусственной неровности в запоминающем устройстве.
2. Способ хранения информации для транспортного средства по п. 1, содержащий этап, на котором:
связывают информацию об искусственной неровности с картографической информацией.
3. Способ хранения информации для транспортного средства по п. 1 или 2, содержащий этапы, на которых:
получают историю движения от транспортного средства дважды или более; и
указывают информацию об искусственной неровности из истории движения, полученной дважды или более.
4. Способ хранения информации для транспортного средства по п. 1, содержащий этапы, на которых:
собирают истории движения от множества транспортных средств; и
указывают информацию об искусственной неровности из собранных историй движения множества транспортных средств.
5. Способ хранения информации для транспортного средства по п. 1, содержащий этапы, на которых:
обнаруживают возмущение, действующее на передние и задние колеса транспортного средства, на основании состояния движения транспортного средства; и
определяют, прошло ли транспортное средство искусственную неровность, на основании возмущения, действующего на передние и задние колеса.
6. Способ хранения информации для транспортного средства по п. 5, содержащий этапы, на которых:
определяют, прошло ли транспортное средство возможную искусственную неровность, на основании возмущения, действующего на передние и задние колеса; и
когда между соответствующими возмущениями, действующими на правое и левое колеса, возникает разность не менее заданной величины, определяют, что возможная искусственная неровность не является искусственной неровностью.
7. Способ хранения информации для транспортного средства по п. 5, содержащий этапы, на которых:
определяют, влияет ли физический объект, присутствующий в окружении транспортного средства, на скорость транспортного средства для транспортного средства; и
только когда физический объект, который не влияет на скорость транспортного средства для транспортного средства, не присутствует в окружении транспортного средства, определяют, прошло ли транспортное средство искусственную неровность.
8. Способ хранения информации для транспортного средства по п. 7, в котором физический объект является движущимся впереди транспортным средством.
9. Способ хранения информации для транспортного средства по любому из пп. 5-7, содержащий этап, на котором:
когда скорость транспортного средства для транспортного средства не превышает заданную скорость в пределах заданного расстояния в продольном направлении транспортного средства по отношению к точке, в которой обнаружено возмущение, действующее на передние и задние колеса, определяют, что транспортное средство прошло искусственную неровность.
10. Способ хранения информации для транспортного средства по любому из пп. 5-8, содержащий этап, на котором:
когда в пределах заданного расстояния с задней стороны транспортного средства по отношению к точке, в которой обнаружено возмущение, действующее на передние и задние колеса, выполняется операция торможения, или когда в пределах заданного расстояния с передней стороны транспортного средства по отношению к упомянутой точке выполняется операция ускорения, определяют, что транспортное средство прошло искусственную неровность.
11. Способ хранения информации для транспортного средства по п. 1, в котором информация об искусственной неровности включает в себя информацию об операции ускорения транспортного средства и информацию об операции торможения транспортного средства, соответствующую информации о положении искусственной неровности.
12. Способ хранения информации для транспортного средства по п. 4, содержащий этапы, на которых:
извлекают историю движения транспортного средства, которое движется с сохранением скорости транспортного средства в заданном диапазоне по отношению к разрешенной скорости, из числа историй движения множества транспортных средств; и
указывают информацию об искусственной неровности на основании извлеченной истории движения.
13. Способ хранения информации для транспортного средства по п. 2, содержащий этап, на котором:
при обнаружении множества искусственных неровностей в пределах заданного расстояния на карте объединяют множество искусственных неровностей в одну искусственную неровность, чтобы таким образом указать информацию о положении искусственной неровности.
14. Способ хранения информации для транспортного средства по п. 4, содержащий этапы, на которых:
собирают истории движения от множества транспортных средств в течение заданного периода после указания информации об искусственной неровности;
извлекают историю движения транспортного средства, которое двигалось в положении искусственной неровности, включенном в информацию об искусственной неровности, из числа собранных историй движения множества транспортных средств; и
когда информация об искусственной неровности не может быть указана из извлеченной истории движения, отменяют сохранение информации об искусственной неровности.
15. Способ управления движением транспортного средства, причем в способе используется процессор для выполнения обработки информации и управления движением транспортного средства на основании результата выполнения, причем способ содержит этапы, на которых:
получают результат обнаружения от датчика, выполненного с возможностью обнаружения положения транспортного средства и состояния движения транспортного средства;
обнаруживают возмущение, действующее на правое и левое колеса транспортного средства, на основании состояния движения транспортного средства;
определяют, прошло ли транспортное средство искусственную неровность, на основании возмущения, действующего на правое и левое колеса;
получают историю движения транспортного средства, при этом история движения включает в себя результат определения того, прошло ли транспортное средство искусственную неровность, и результат обнаружения от датчика;
указывают из истории движения информацию о положении искусственной неровности и информации о скорости транспортного средства для транспортного средства при прохождении искусственной неровности в качестве информации об искусственной неровности; и
управляют движением транспортного средства на основании информации об искусственной неровности.
16. Устройство для хранения информации для транспортного средства, содержащее:
процессор, выполненный с возможностью выполнения обработки информации; и
запоминающее устройство, выполненное с возможностью сохранения результата выполнения процессором,
причем процессор функционирует для:
получения результата обнаружения от датчика, выполненного с возможностью обнаружения положения транспортного средства и состояния движения транспортного средства;
обнаружения возмущения, действующего на правое и левое колеса транспортного средства, на основании состояния движения транспортного средства;
определения, прошло ли транспортное средство искусственную неровность, на основании возмущения, действующего на правое и левое колеса;
получения истории движения транспортного средства, при этом история движения включает в себя результат определения того, прошло ли транспортное средство искусственную неровность, и результат обнаружения от датчика;
указания из истории движения информации о положении искусственной неровности и информации о скорости транспортного средства при прохождении им искусственной неровности в качестве информации об искусственной неровности; и
сохранения информации об искусственной неровности в запоминающем устройстве.
| JP 2012218548 A, 12.11.2012 | |||
| US 2015291177 A1, 15.10.2015 | |||
| JP 2010018075 A, 28.01.2010. |

