Изобретение относится к области физики, в частности к гравиметрии, и может быть использовано при проведении геофизических исследований, результаты которых востребованы в таких областях техники, как астрономия, геодезия и геология.
Для измерения абсолютного значения ускорения свободного падения gz (далее - ускорение gz) используются абсолютные гравиметры, принцип действия которых основан на баллистическом методе измерения абсолютного значения gz (м/с2), посредством измерения пути и времени свободного падения. Реже используют маятниковые приборы. Единицей измерения ускорения gz в гравиметрии является Гал (Gal) - значение ускорения gz, равное 0,01 м/с2 (m/с2).
Наиболее близкими по совокупности существенных признаков к заявленному изобретению являются способ и реализующие его устройства, предназначенные для измерения ускорения gz, которые используются при проведении геологоразведочных работ, а именно гравиметр ГНУ-КВК в его компьютеризированной модификации (см. http://geoget.ru/content/view/141/384/) или из зарубежных аналогов - гравиметр модели CG-5 AutoGrav фирмы «Scintrex» (см. http://geocentr-msk.ru/conten/view/441/137). В данных гравиметрах реализован способ измерения величины деформации первичного преобразователя под действием силы тяжести (mgz), пропорциональной ускорению. Конструкция гравиметра содержит гравиметрический датчик (далее - датчик), состоящий из пробной массы m и первичного механического преобразователя, регистратор его деформации, усилитель, цифровой преобразователь и компьютер, которые составляют измерительный канал датчика. Гравиметры работают в автоматическом режиме.
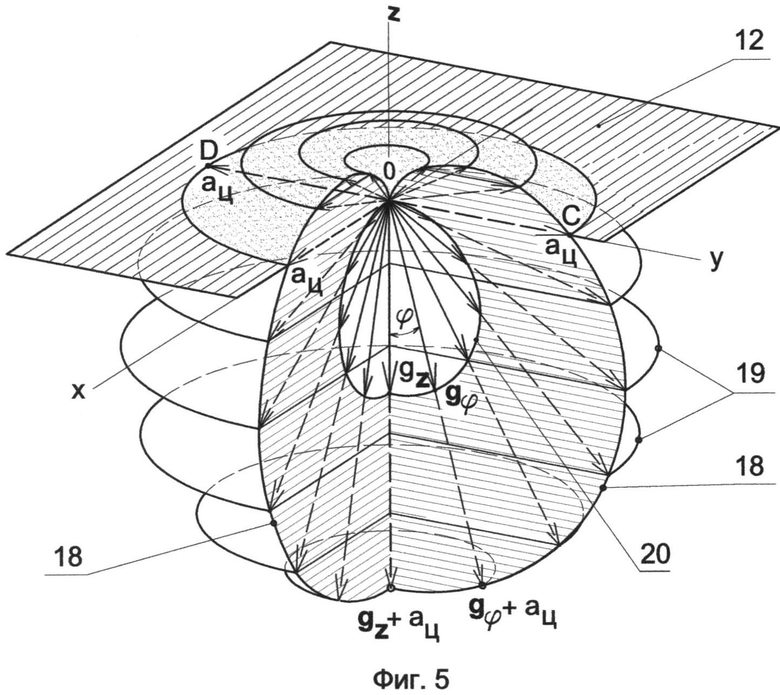
К недостатку гравиметра относится то, что ускорение gz, объемная характеристика которого на поверхности полупространства представляет сферу 20 (далее - 3D-годограф, фиг. 5), производят в виде единичного вектора, совпадающего с линией отвеса. Это снижает информативность гравиметрических измерений.
Задачей, на решение которой направлено изобретение, является разработка способа измерения и устройства, повышающих информативность гравиметрических измерений.
Поставленную задачу решают методом дополнения посредством измерения деформации гравиметрического преобразователя, которая пропорциональна силе тяжести пробной массы (mgz).
Согласно изобретению значение ускорения gz дополняют мерой сравнения - значением центростремительного ускорения ац, с таким расчетом, чтобы они воздействовали на пробную массу датчика совместно в виде результирующего вектора gz+ац, для чего используют нулевой метод измерения. В предложенном изобретением способе меру сравнения (центростремительное ускорение ац) воспроизводят в процессе проведения измерений. Модуль результирующего вектора gz определяют посредством измерения секундомером угловой скорости (ω рад/сек) равномерного вращения датчика по круговой траектории постоянного радиуса (R=const) и вычисляют значение центростремительного ускорения: ац=ω2R м/с2, которое равно определяемому значению ускорения gz - способ является прямым. Угловую скорость ω измеряют в момент, когда модули вектора центростремительного ускорения и ускорения gz, измеренные в верхней точке траектории вращения, равны, вектора разнонаправлены и сумма их значений равна нулю, что соответствует «невесомости» пробной массы датчика. При этих условиях модуль результирующего вектора в нижней точке траектории равен удвоенному значению определяемого ускорения 2gz=2ац, так как вектора центростремительного и ускорения свободного падения направлены в одну сторону. Определение модуля результирующего вектора ускорения по направлению Sφ выполняют посредством регистрации мгновенного значения гравиметрического датчика, преобразующего силу давления пробной массы m(gφ+aц) в электрический сигнал, посредством определения годографа 360°, представленного серией результирующих векторов (gφ+ац).
Годограф 360° является результатом векторного сложения годографа ускорения gφ по направлениям и диаграммы центростремительного ускорения ац. При этом, как и при определении ускорения gz, определение модулей результирующих векторов ускорения (gφ+ац) по направлениям Sφ осуществляют при прямом и обратном направлениях вращения, в режиме статистического накопления измеренных значений и вычисляют средние арифметические значения. Годограф 360° при gz<ац тождественен «улитке Паскаля», а при равенстве значений gz и ац преобразуется в «кардиоиду». Внутренняя петля стягивается в полюс суммируемых диаграмм 0 (при этом метод измерения дополнением совмещают с нулевым методом), что является признаком равенства ускорения gz и меры сравнения ац и определяет момент регистрации значения угловой скорости (ω) и значений сигнала первичного преобразователя по направлениям Sφ. Сумма модулей двух противоположно направленных результирующих векторов кардиоиды Sφ, и Sφ+180, лежащих на любой прямой с общим полюсом 0, равна удвоенному значению определяемого ускорения свободного падения 2gz.
Гравиметрический датчик обладает диаграммой направленности, максимальная чувствительность которого совпадает с линией действия центростремительного ускорения ац, а минимальная лежит в перпендикулярной к ней плоскости. Далее определяют пространственный 3D-кардиоид, охарактеризованный серией кардиоид (gφ+ац), равномерно распределенных по его объему, с общим полюсом (0), вычисляют среднее значение модуля свободного падения gz и погрешности его определения. Из пространственного 3D-кардиоида вычитают среднее значение модуля ускорения свободного падения gz=ац (по п.1.10), получают наблюденный 3D-годограф gφ, по направлениям, в который вводят поправки. По вычисленному значению ускорения gz рассчитывают по формуле gφ=gzcosφ «нормальный годограф». По его сравнению с наблюденным 3D-годографом gφ выявляют аномальные отклонения 3D-годографа (±Δgφ). Далее определяют параметры аномальных отклонений и классифицируют их природу. Определение и контроль метрологических параметров реализуют посредством регистрации показаний измерительного канала при вращении датчика в уровненной поверхности в диапазоне значений угловой скорости вращения, обеспечивающих формирование центростремительного ускорения в интервале 0-2ац, где ац заведомо больше максимального значения ускорения gz. Термин «уровенная поверхность» установлен ГОСТ 52334-2005 Гравиразведка. Термины и определения. Является синонимом термина - «эквипотенциальная поверхность».
В основе решения поставленной задачи лежат известные из теории гравиразведки и метрологии данные:
1) Из источника ИВиС ДВО РАН «Геофизические методы исследований», Гравиразведка, 2.1, Основы теории гравиразведки», известно, что «гравитационное поле Земли относится к классу потенциальных полей, т.е. таких, когда каждой точке пространства вокруг Земли (вне притягиваемых масс) можно поставить в соответствие некоторую непрерывную и имеющую непрерывные производные функцию. Производные этой функции по направлениям равняются проекциям силы тяжести на эти направления. Такую функцию называют гравитационным потенциалом W. Производная гравитационного потенциала по произвольному направлению: dW/dS=gz·cosφ=gφ, где φ - угол между вектором gz и направлением Sφ. Откуда следует, что направление Sφ может быть в частности таким, что cosφ=0, а значит Sφ и gz будут перпендикулярны. В этом случае dW/dS=0 или W=const, и можно построить поверхность с постоянным значением гравитационного потенциала, которую называют уровенной поверхностью (фиг. 1-4, D0C). Сила тяжести на уровенной поверхности нормальна к ней». Здесь и далее сохранена терминология и обозначения физических величин, принятые в первоисточниках. В графическом виде зависимость gφ=gzCosφ представляет годограф gφ 15 по направлениям (фиг. 1-4) в виде окружности с полюсом 0, принадлежащим уровенной поверхности, лежащим в произвольной плоскости с линией отвеса. Годограф является частным случаем объемного 3D-годографа в виде сферы 20 (фиг. 3).
2) Из источника: «Основы физики», Б.М. Яворский, А.А. Пинский, том 1, 1974, известно, что при равномерном движения массы m по окружности в вертикальной плоскости радиуса R с линейной скоростью v, на тело действуют две силы: реакция связи Q и притяжение земли Р. В нижней точке реакция направлена вертикально вверх, а верхней - вертикально вниз с центростремительным ускорением ац=v2/R по линии действия силы тяжести (ось Z направлена вниз). Уравнение движения в векторной форме имеет вид Р+Q=maц. В нижней точке траектории Р-Q=-mv2/R, откуда Q=Р+mv2/R=m(v2/R+gz) (1). В верхней точке Р+Q=mv2/R, откуда Q=mv2/R-Р=m(v2/R-gz) (2). Из уравнения 2 следует, что условием нахождения тела на траектории является v2/R, большее или равное gz. Минимальную линейную скорость (v) находят из условия ее равенства корню квадратному из произведения gzR. Или иначе - «невесомость пробной массы» наступает при ее движении с центростремительным ускорением, равным ускорению свободного падения (ац=gz). В нижней точке траектории ускорение составит 2g (уравнение 1). Мгновенная линейная скорость v движения точки по окружности: v=ωR, центростремительное ускорение через угловую скорость: ац=ω2R=v2/R.
3) Из источника «Мокров Ю. Метрология,…». Нулевой метод измерений - метод сравнения с мерой, в котором результирующий эффект воздействия измеряемой величины и меры на прибор сравнения доводят до нуля. Нулевой метод измерений, один из вариантов метода сравнения с мерой, в котором на нулевой прибор воздействует сигнал, пропорциональный разности измеряемой величины и известной величины, причем эту разность доводят до нуля.
4) Из источника «Мокров Ю. Метрология,…». Метод измерений дополнением - метод сравнения с мерой, в котором значение измеряемой величины дополняют мерой этой же величины с таким расчетом, чтобы на прибор сравнения воздействовала их сумма, равная заранее заданному значению. Методы по позициям 3 и 4 широко используются в метрологии при передаче физических единиц от их эталонов образцовым средствам измерения. При этом в качестве прибора сравнения используют компаратор.
5) В начале 2011 г. американская компания Symmetricom объявила о коммерческом выпуске цезиевых атомных часов размером с небольшую микросхему. Часы работают на основе эффекта когерентного пленения населенности. Их стабильность - 5·10-11 за час, масса - 35 г, потребляемая мощность - 115 мВт. Стабильность атомных часов, используемых в космонавтике и навигации (GPS, ГЛОНАСС, Galileo), обычно лежит в пределах 10-14-10-15. Ист. Википедия. Далее по тексту атомные часы - секундомер.
Способ реализуют посредством устройства, оснащенного датчиком, содержащим пробную массу m и первичный преобразователь, регистратор его деформации, усилителем, цифровым преобразователем, компьютером, которые работают в автоматическом режиме. Согласно изобретению устройство содержит первичный преобразователь, который преобразует силу давления массы m(gφ+ац) в электрический сигнал. Датчик установлен на расстоянии R=const от оси диска. Устройство оснащено приводом принудительного вращения, обеспечивающим вращение диска в прямом и обратном направлении. Диск помещен в координатное устройство, которое позволяет выполнять измерения в уровенной и перпендикулярных ей плоскостях с линией отвеса. Устройство также оснащено средством регистрации угловой скорости вращения датчика - секундомером. Измерительный канал одного из датчиков обеспечивает возможность включения секундомера при обращении в ноль показаний одного измерительного канала.
При изучении объемной характеристики поля на точке наблюдения в качестве электромеханического преобразователя, например, используют пьезорезонансный датчик, описанные в статье Хлыстова М.С. «Частотные пьезорезонансные датчики для геофизических работ» В статье дается рекомендация о целесообразности их использования в датчиках. Наряду с этим, в журнале Physical Review Letters сообщается о том, что «ученые из Seoul National University (Корея) разработали тонкие пленки из HoMnO3 (Ho - гольмий) с флексоэлектрическим эффектом, подобным пьезоэлектрическому, который на 6-7 порядков выше, чем тот, который регистрируют при деформации оксидов». В качестве подложки использован сапфир. Датчик работает на скручивание и изгиб. Также может быть применен иной тензодатчик (преобразователь силы), обеспечивающий необходимую точность измерения.
Полученный технический результат заключается в следующем: Способ прямой - результаты измерения получают в единицах ускорения gz - м/с2, в его основе лежит простая физико-математическая база. Применение метода дополнения совместно с нулевым методом и статистических методов позволяет выделять слабые сигналы, исключать промахи и систематические погрешности. Дает объемную характеристику гравитационного поля на точке наблюдения по направлениям. Позволяет проводить детализацию и уточнять местоположение элементов поля по отдельным сечениям и направлениям Диапазон измерения ускорения gz не имеет ограничения. Способ позволяет контролировать поправки за влияние планет и рельеф, метрологические параметры устройства непосредственно при проведении измерений. Способ и устройство, в котором он реализован, существенно повышают точность и информативность гравиметрических измерений.
Заявителю неизвестно использование в науке и технике отличительных признаков предлагаемых изобретением способа и устройства, с достижением указанного результата.
Сущность изобретения поясняется на чертежах и полярных диаграммах:
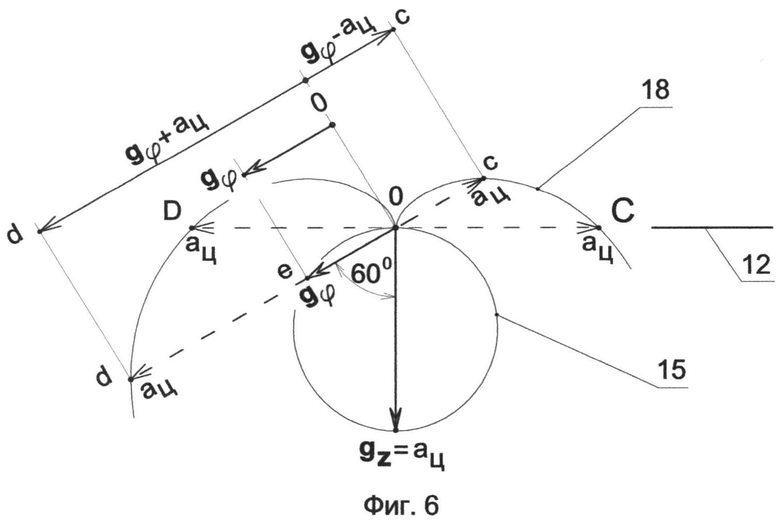
фиг.1 - схематическое изображение устройства измерения ускорения;
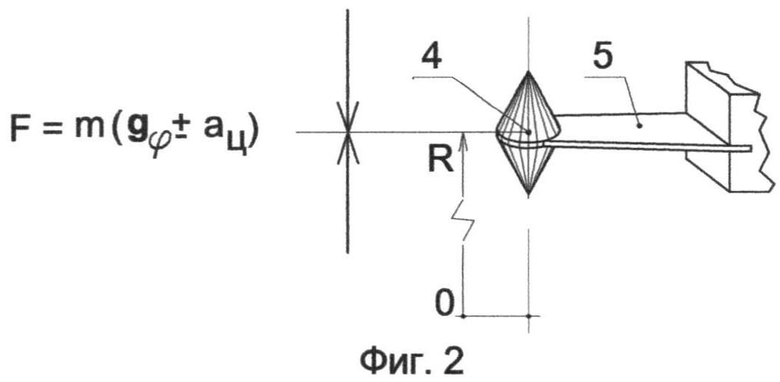
фиг.2 - схематическое изображение первичного преобразователя датчика;
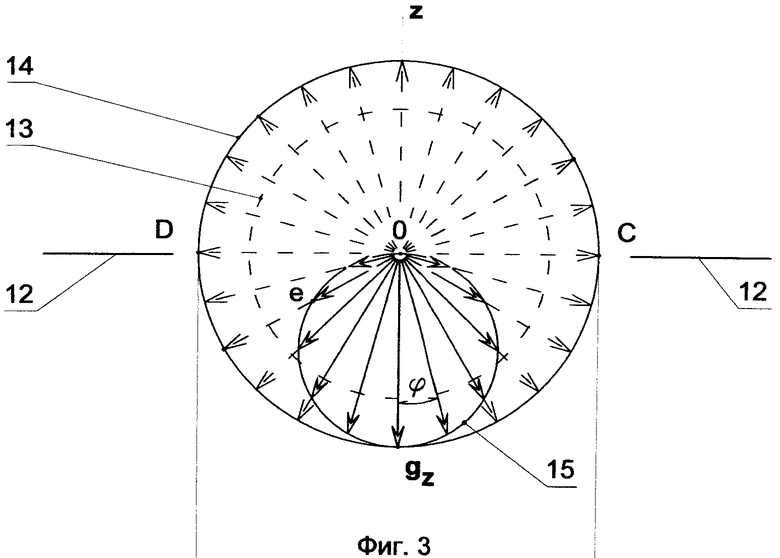
фиг.3 - годограф gφ, по направлениям 0-180° - 15 и диаграммы 0-360° центростремительного ускорения ац - 13,14, при ац=0,75 и 1,0 gz соответственно;
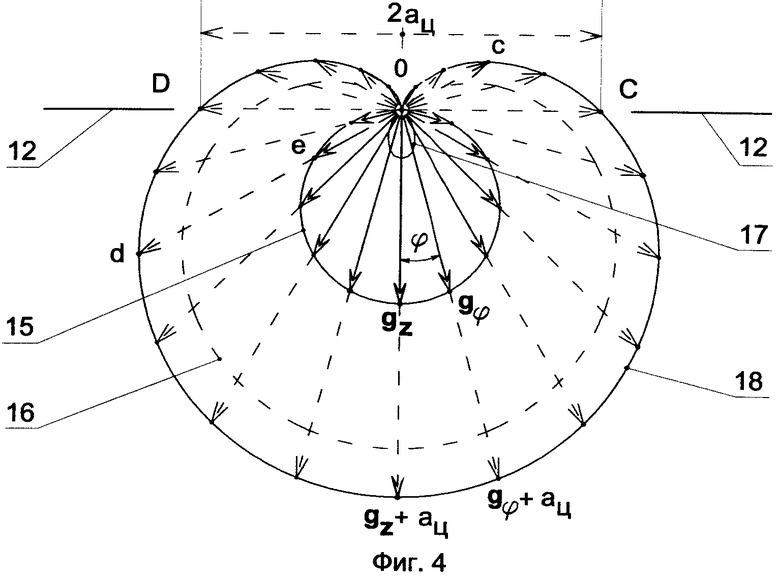
фиг.4 - расчетный годограф 16 и 17 - «улитка Паскаля» (при ац=0,75gz) и кардиоида 18 при ац=gz;
фиг.5 - объемный 3D-кардиоид;
фиг.6 - пример определения ускорения gz, по направлению Sφ=60°.
Устройство 1 (фиг.1) измерения ускорения gz содержит датчик 2 и 3, состоящий из пробной массы 4 (фиг.2), которая воздействует на электромеханический первичный преобразователь 5 по направлению радиуса R (фиг.2). Датчики 2 и 3 установлены на диске 6, который имеет ось 7. Устройство оснащено приводом принудительного вращения 8, которое обеспечивает вращение диска 6 с заданной угловой скоростью в прямом и обратном направлениях. Диск 6 помещен в координатное устройство 9, позволяющее посредством осей 10 и 11 выполнять измерения в выбранном пространственном положении плоскости вращения диска 6.
Способ измерения ускорения gz и ее составляющих gφ реализуют следующим образом. Устройство 1 (фиг.1) устанавливают на точке наблюдения и ориентируют по странам света. Плоскость диска 6 размещают в уровенной плоскости x0y 12 (фиг.1). При этом преобразователи 5 (фиг.2) датчиков 2 и 3 не регистрируют значений ускорения gz и ее составляющих gφ. Проводят контроль градуировочных и других метрологических параметров измерительного устройства 1. Для этого диск 6 приводят во вращение и, ступенчато изменяя скорость вращения, регистрируют посредством секундомера угловую скорость при равномерном вращении датчика (ω=const) и соответствующие ей показания измерительного канала в диапазоне 0-2ац. При этом верхнее значение ац должно быть больше максимального значения gz на исследуемой площади. Измерения проводят в прямом и обратном направлении вращения диска в режиме статистического накопления измеренных значений и вычисляют средние значения. Диск 6 разворачивают на 180° вокруг горизонтальной оси 10 координатного устройства 9 и повторяют цикл измерений. Изменение плоскости вращения выполняют при остановленном диске.
Для каждого значения скорости вращения вычисляют среднее значение, строят график зависимости показаний измерительного канала от угловой скорости, определяют погрешность измерений, выявляют систематические погрешности и их значения. На фиг. 3 приведены графически построенные полярные диаграммы 360° 13 и 14 центростремительного ускорения ац для условий измерения в уровенной плоскости 12 при скорости вращения диска, обеспечивающей формирование центростремительного ускорения, равного 0,75 и 1,0 gz соответственно. Далее плоскость диска 6 устанавливают в перпендикулярное уровенной поверхности 12 положение (в плоскости с линией отвеса), ориентируют по странам света и приводят во вращение.
На фиг. 4 приведен графически построенный годограф при ускорении ац=0,75 gz, состоящий из двух петель - внешней 16 и внутренней 17, которые формируют улитку Паскаля. Увеличивая (в автоматическом режиме) скорость вращения, в момент, когда показания измерительного канала датчика 2, находящегося в верхней точке траектории, обращаются в ноль, регистрируют секундомером угловую скорость. Угловую скорость соизмеряют при установившемся равномерном вращении диска в режиме статистического накопления измерений и вычисляют средние арифметические значения. Начало отсчета угловой скорости посредством секундомера обеспечивает измерительный канал (например, датчика 2), который работает в индикаторном режиме и обеспечивает проведение измерений в интервале времени, когда пробная масса датчика находится в «невесомости».
При вычислении центростремительного ускорения ац=ω2R м/с2 за значение радиуса (R=const) принимают расстояние между осью вращения и центром пробной массы 4 индикаторного датчика 2. Точность определения радиуса R должна быть соизмерима с точность определения значения угловой скорости ω. Таким образом, при определении значения ускорения свободного падения gz применяют секундомер в качестве средства измерения и индикатор, в режиме которого работает один из измерительных каналов устройства. При нахождении датчика в нижней точке траектории вращения модуль результирующего вектора равен сумме модулей ускорения gφ и центростремительного ускорения (gz+ац=2gz=2ац).
В результате измерений получают полярную диаграмму 360° в виде кардиоиды 18 (фиг.4), представленную серией результирующих векторов gφ+ац по направлениям. Кардиоида 18 является результатом векторного сложения годографа gφ, по направлениям 15 и диаграммы 14 центростремительного ускорения ац, имеет полюс 0, принадлежащий уровенной поверхности 12. Не изменяя плоскости вращения, проводят описанный цикл измерении в противоположном направлении вращения диска. Далее определяют 3D-кардиоид 19 (фиг. 6), представленный кардиоидами 18 с общим полюсом 0, количество которых достаточно для объемной характеристики поля на точке наблюдения. Изменение плоскости вращения выполняют посредством поворота диска на угол α (фиг.1), который задают методикой проведения измерений.
На фиг. 5 приведен расчетный (нормальный) 3D-кардиоид в виде изолиний 19 - геометрическим местом результирующих векторов с равными значениями gφ+ац по нескольким направлениям Sφ. По значению средней угловой скорости вращения диска вычисляют значение центростремительного ускорения: ац=ω2R м/с2, которое равно определяемому значению gφ. Из кардиоид 18, составляющих 3D-кардиоид, вычитают среднее значение центростремительного ускорения ац=gz по каждому направлению Sφ. В результате получают наблюденный 3φ-годограф gφ, по направлениям 20 (фиг.5), в который вводят поправки.
На фиг. 6 приведен пример вычисления модуля единичного вектора gφ по направлению Sφ (при φ=60°). Модуль вектора g60 определен двумя векторами - результирующим вектором Od g60 +aц и противоположно направленным результирующим вектором Oc (g60-ац), которые лежат на одной прямой dOc с полюсом диаграммы - 0. При вычитании из модулей результирующих векторов меры сравнения ац получают значение модуля определяемого вектора (g60+ац)-ац=g60. Вектор Oc сформирован двумя противоположно направленными векторами g60-ац, откуда g60=(g60-ац)+ац. Из двух полученных модулей g60-Ое находят среднее арифметическое. Измерения на точке наблюдения заканчивают проверкой метрологических параметров в уровенной плоскости 12. В результате сравнения наблюденного 3D-годографа с расчетным 3D-годографом gφ выявляют аномальные отклонения ±Δgφ, пространственные и количественные параметры аномалии, классифицируют ее природу.
Способ и устройство позволяют существенно повысить точность и информативность гравиметрических измерений. Могут найти применение в астрономии, геодезии, метрологии и изучении гравитационных полей планет и их спутников.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДИСТАНЦИОННОГО ГРАВИМЕТРИЧЕСКОГО ЗОНДИРОВАНИЯ | 2014 |
|
RU2581076C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ОТНОСИТЕЛЬНО ВЕКТОРА СИЛЫ ТЯЖЕСТИ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2007 |
|
RU2343418C1 |
| Гравиметр | 2023 |
|
RU2797144C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |
| Способ фильтрации значений параметров единичных бросков в процессе измерения в оптической схеме абсолютных гравиметров | 2024 |
|
RU2841495C1 |
| Способ морской гравиметрической съемки и устройство для его осуществления | 2020 |
|
RU2767153C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| Гиростабилизированный кварцевый гравиметр и способ его калибровки | 2015 |
|
RU2619132C1 |
| НАЗЕМНЫЙ ГРАВИМЕТРИЧЕСКИЙ ДАТЧИК ИСТИННЫХ АЗИМУТОВ И УГЛОВ ОТКЛОНЕНИЯ ЕГО СИСТЕМЫ КООРДИНАТ ОТНОСИТЕЛЬНО ВЕКТОРА СИЛЫ ТЯЖЕСТИ | 2004 |
|
RU2260176C1 |
Предложены способ и устройство измерения ускорения свободного падения. В способе измерение ускорения свободного падения осуществляют посредством измерения деформации первичного электромеханического преобразователя гравиметрического датчика, пропорциональной силе тяжести пробной массы. Значение ускорения дополняют мерой сравнения - значением центростремительного ускорения, воздействующего на пробную массу датчика совместно c силой тяжести. Техническим результатом является расширение арсенала средств измерения ускорения свободного падения. 2 н. и 15 з.п. ф-лы, 6 ил.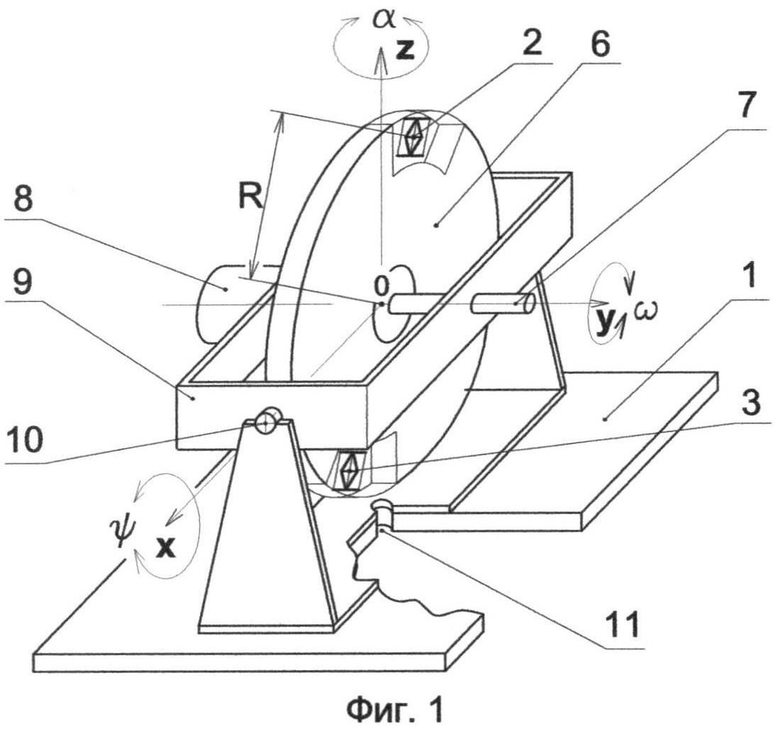
1. Способ измерения ускорения свободного падения gz посредством измерения деформации первичного механического преобразователя гравиметрического датчика, пропорциональной силе тяжести пробной массы mgz, отличающийся тем, что значение ускорения gz дополняют мерой сравнения - значением центростремительного ускорения ац с таким расчетом, чтобы они воздействовали на пробную массу датчика совместно в виде результирующего вектора (gz+ац).
2. Способ по п.1, отличающийся тем, что меру сравнения (модуль центростремительного ускорения ац) воспроизводят в процессе проведения измерений.
3. Способ по п.1, отличающийся тем, что значение меры сравнения ац определяют посредством измерения секундомером угловой скорости (ω рад/сек) равномерного вращения датчика по круговой траектории постоянного радиуса (R=const), где ац=ω2R м/с2, при этом значение R принимают для датчика, по показаниям которого определен момент включения секундомера.
4. Способ по п.3, в котором измерение секундомером угловой скорости выполняют в интервале времени, в котором модуль результирующего вектора в верхней точке траектории, в которой векторы центростремительного и ускорения свободного падения равны между собой и разнонаправлены, и сумма их значений равна нулю.
5. Способ по п.1, отличающийся тем, что определение модуля результирующего вектора ускорения по направлению Sφ выполняют посредством регистрации мгновенного значения гравиметрического датчика, преобразующего силу давления пробной массы m(gφ+aц) в электрический сигнал.
6. Способ по п.1, отличающийся тем, что определение модулей результирующих векторов ускорения по направлениям Sφ выполняют посредством определения годографа 360°, представленного серией результирующих векторов (gφ+ац) - результат векторного сложения годографа ускорения gφ по направлениям и диаграммы центростремительного ускорения ац.
7. Способ по п.6, в котором годограф 360° при gz<aц тождественен «улитке Паскаля», а при равенстве значений gz и ац преобразуется в «кардиоиду», его внутренняя петля стягивается в полюс суммируемых диаграмм 0, что является признаком равенства ускорения gz и меры сравнения ац и определяет момент регистрации значений сигнала первичного преобразователя по направлениям Sφ.
8. Способ по п.1, отличающийся тем, что определение модулей результирующих векторов ускорения по направлениям Sφ проводят в прямом и обратном направлениях вращения, в режиме статистического накопления измеренных значений и вычисляют средние арифметические значения.
9. Способ по п.1, отличающийся тем, что гравиметрический датчик обладает диаграммой направленности, максимальная чувствительность которого совпадает с линией действия центростремительного ускорения ац, а минимальная лежит в перпендикулярной к ней плоскости.
10. Способ по п.1, отличающийся тем, что определяют пространственный 3D-кардиоид, охарактеризованный серией кардиоид (gφ+ац), равномерно распределенных по его объему, с общим полюсом (0).
11. Способ по п.10, в котором из пространственного 3D-кардиоида вычитают значение меры сравнения (центростремительное ускорение aц=gz), получают наблюденный 3D-годограф gφ по направлениям, в который вводят поправки.
12. Способ по п.11, в котором рассчитывают (gφ=gzcosφ) «нормальный годограф» и по его сравнению с наблюденным 3D-годографом gφ, по направлениям, выявляют аномальные отклонения 3D-годографа (±Δgφ), определяют параметры и классифицируют природу аномальных отклонений.
13. Способ по п.1, отличающийся тем, что определение и контроль метрологических параметров реализуют посредством регистрации показаний измерительного канала при вращении датчика в уровненной поверхности в диапазоне значений угловой скорости, обеспечивающей формирование центростремительного ускорения в интервале 0-2ац.
14. Устройство измерения ускорения свободного падения gz, оснащенное гравиметрическим датчиком, содержащим пробную массу m, первичный преобразователь, регистратор его деформации, усилителем, цифровым преобразователем, компьютером и работающее в автоматическом режиме, отличающееся тем, что гравиметрический датчик, содержащий электромеханический преобразователь, расположен на диске с осью.
15. Устройство по п.14, отличающееся тем, что устройство оснащено приводом принудительного вращения, который обеспечивает вращение диска в прямом и обратном направлениях с заданной угловой скоростью вращения.
16. Устройство по п.14, отличающееся тем, что диск размещен в координатном устройстве, обеспечивающем возможность выполнять измерения в выбранном пространственном положении плоскости вращения.
17. Устройство по п.14, отличающееся тем, что устройство оснащено регистратором угловой скорости вращения диска, например секундомером.
| US 3273397 A, 20.09.1966 | |||
| Устройство для съема волокна с хлопковых семян и шелухи | 1950 |
|
SU89723A1 |
| RU 95100482, 27.01.1997 | |||
| Гравиметр | 1945 |
|
SU75181A1 |
| Золотоизвлекательная машина | 1929 |
|
SU21067A1 |
| JP 62140088, 23.06.1987. | |||

