Область техники
Изобретение относится к области неразрушающих испытаний материалов и изделий ультразвуковым методом, в частности к способам и устройствам определения диаграмм направленности пьезоэлектрических преобразователей (ПЭП), и может быть использовано как разработчиками и изготовителями ПЭП для их паспортизации, так и их пользователями.
Уровень техники
Диаграмма направленности преобразователя является одной из важных характеристик, которая, в свою очередь, обусловливает выбор других, основных параметров контроля, таких как чувствительность, точность измерения координат дефектов, шаг сканирования и др. (Гурвич А.К., Кусакин Н.А. О допустимом разбросе числовых характеристик диаграммы направленности наклонных преобразователей. - Дефектоскопия. 1984. №11. С. 60-66).
Эта характеристика представляет особый интерес при разработке новых технологий, когда необходимо предусматривать взаимозаменяемость преобразователей, выпускаемых разными фирмами.
Известен способ определения диаграммы направленности при регистрации поля излучения ПЭП на поверхности полуцилиндрического образца точечным приемным преобразователем, например электромагнитно-акустическим, при расположении точки выхода луча исследуемого преобразователя на оси полуцилиндрической поверхности (см. Европейский стандарт. EN 12668-2: 2001. Неразрушающий контроль. Характеристика и проверка ультразвукового оборудования. Ч. 2. Преобразователи). Этот способ наиболее точен, однако его недостатком является техническая сложность реализации и необходимость применения дополнительного приемного преобразователя. Кроме того, условия определения диаграммы направленности этим способом отличаются от условий при проведении контроля, когда регистрируется эхо-сигнал на излучение-прием в совмещенном режиме.
Известен способ определения диаграммы направленности ПЭП, при котором регистрируют эхо-сигналы в совмещенном режиме от дна полусферического или полуцилиндрического образца, при сканировании ПЭП по двум координатам, по эхо-сигналам определяют пространственный спектр голограмм с последующим расчетом диаграммы направленности (Вопилкин А.К., Базулин А.Е., Базулин Е.Г. Способ определения диаграммы направленности пьезоэлектрического преобразователя. Патент RU 2415388 С2, МПК G01H 17/00, 27.03.2011).
Недостатком данного способа является то, что он является косвенным, т.к. диаграмму направленности рассчитывают по эхо-сигналам от вогнутой полусферической или полуцилиндрической поверхности образца (направленный фокусирующий отражатель), в то время как на практике ПЭП используют для обнаружения преимущественно ненаправленных отражателей и в соответствии с ГОСТ 23702-90 «Преобразователи ультразвуковые. Методы испытаний» характеристики диаграммы направленности ПЭП определяют по эхо-сигналам от ненаправленного отражателя (обычно - это боковое цилиндрическое отверстие в стандартном образце СО-2).
За прототип выбран способ определения диаграммы направленности ПЭП по пространственной огибающей амплитуд эхо-сигналов от ненаправленного отражателя в виде бокового цилиндрического отверстия диаметром 6 мм, центр которого находится на глубине 44 мм, в стандартном образце СО-2, в котором при помощи ультразвукового дефектоскопа (УЗД), имеющего аттенюатор, регистрируют эхо-сигналы при сканировании ПЭП в одной плоскости (Гурвич А.К., Кузьмина Л.И. Справочные диаграммы направленности искателей ультразвуковых дефектоскопов. Киев, Техника, 1980 г., с. 47-51).
В соответствии с прототипом предварительно уточняют положение точки выхода луча ПЭП по стандартному образцу СО-3, далее устанавливают преобразователь на стандартный образец СО-2 в положения, в которых регистрируют эхо-сигналы от ненаправленного отражателя, определяют значения углов αmin и αmax, при которых возможно измерение амплитуд эхо-сигналов. Процесс определения диаграммы направленности заключается:
- в измерении при помощи дефектоскопа, имеющего аттенюатор, в децибелах амплитуды U(α) эхо-сигнала ненаправленного отражателя при совмещении точки выхода луча с каждым делением в градусах на шкале стандартного образца СО-2 при перемещении ПЭП по образцу в пределах значений αmin-αmax по шкале;
- добавлении к каждому значению U(α) соответствующего значения в децибелах функции F1(α)=20lg(1/cos3/2α), учитывающей расхождение ультразвукового пучка;
- вычислении нормализованной функции F2(α)=[U(α)+F1(α)]-[U(α0)+F1(α0)] путем вычитания от всех значений функции [U(α)+F1(α)] ее максимального значения, соответствующего номинальному углу α0;
- делении значения функций F2(α) пополам и переводе полученных значений децибел в относительные значения искомой функции Ф(α), характеризующей диаграмму направленности искателя как в режиме излучения, так и в режиме приема.
Недостатком данного способа является трудоемкость процесса определения диаграмм направленности, которая производится вручную по точкам и требует значительного времени. Автоматизация способа требует использования прецизионных механических устройств сканирования.
Задачей настоящего изобретения является разработка способа определения диаграммы направленности ПЭП, позволяющего автоматизировать процесс, снизить трудоемкость, повысить достоверность и точность измерений.
Раскрытие изобретения
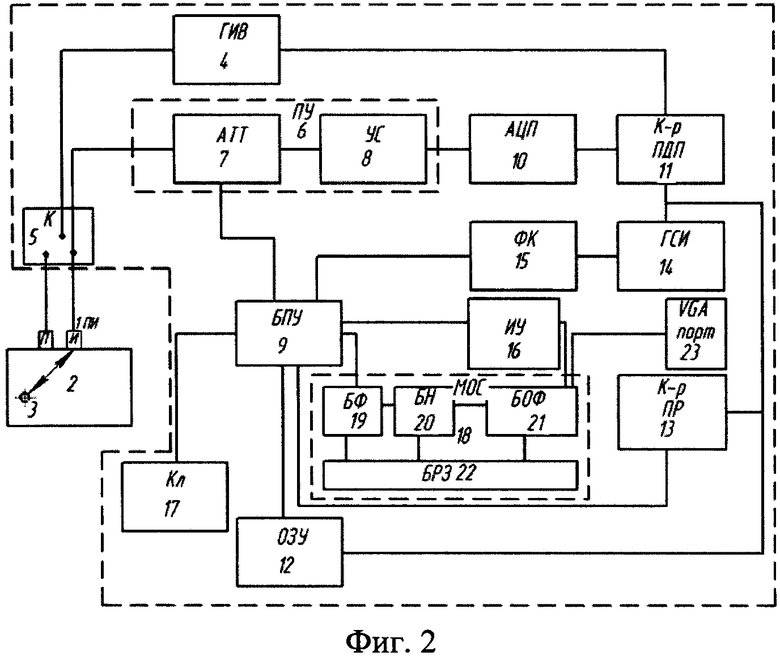
Для решения поставленной задачи предложен способ определения диаграммы направленности ПЭП путем перемещения ПЭП по образцу в пределах регистрации эхо-сигнала от ненаправленного отражателя, на основании данных по амплитуде и углу ввода ультразвука, заключающийся в том, что угол ввода ультразвука рассчитывают, для чего производят одновременное измерение амплитуды U и времени прихода эхо-сигналов t, в произвольных точках образца при известной глубине отражателя h и скорости распространения ультразвука в образце с, расчет угла ввода производят по формуле α=arccos(2h/ct) и последующее определение диаграммы направленности осуществляют в устройстве, заявленном в п. 2.
Отличием заявляемого изобретения от прототипа является то, что:
- измерение амплитуды эхо-сигнала от ненаправленного отражателя производят в произвольных точках в пределах диапазона перемещения преобразователя по поверхности образца;
- в каждой точке, где произведено измерение амплитуды эхо-сигнала, одновременно измеряют время его прихода;
- угол ввода в каждой точке рассчитывают по времени прихода эхо-сигнала при известной глубине отражателя и скорости распространения ультразвука в материале образца;
- расчет угла ввода и последующее определение диаграммы направленности производят в устройстве, заявленном в п. 2.
На фиг. 1 пояснены принцип реализации предложенного способа и его отличие от прототипа. В произвольном положении ПЭП 1 в пределах регистрации эхо-сигнала на образце 2 с отражателем 3 в форме бокового цилиндрического отверстия, выполненного на глубине h при помощи устройства, заявленного в п. 2 формулы изобретения, производят измерение амплитуды эхо-сигнала U и времени его прихода t. По времени прихода эхо-сигнала производят вычисление значения расстояния r от точки выхода луча ПЭП до отражателя по формуле: r=ct/2, где с - скорость ультразвуковой волны в образце. Зная глубину залегания отражателя, рассчитывают угол ввода ультразвука в данной точке по формуле α=arccos(h/r)=arccos(2h/ct). Устанавливают ПЭП 1 в различные произвольные положения в пределах регистрации эхо-сигналов и повторяют процессы измерения амплитуды эхо-сигналов, времени их прихода и расчет угла ввода ультразвука в этих положениях. Для обработки результата измерений использован алгоритм, приведенный в прототипе (Гурвич А.К., Кузьмина Л.И. Справочные диаграммы направленности искателей ультразвуковых дефектоскопов. Киев, Техника, 1980 г., с. 47-51).
Достигаемый технический результат
Предложенный способ позволяет автоматизировать процесс определения диаграммы направленности ПЭП, что приводит к снижению трудоемкости, повышению достоверности, точности измерений.
Уровень техники по устройству
В качестве прототипа предлагаемого устройства выбран ультразвуковой дефектоскоп (патент RU 2168723, 10.06.2001), позволяющий обнаруживать дефекты в материалах и изделиях, измерять их координаты и время от момента посылки импульса до прихода эхо-сигнала, определять отношение амплитуд регистрируемых эхо-импульсов, остановить (“заморозить”) изображение для одного эхо-сигнала, измеряя амплитуду и время в точке развертки, сформировать логарифмический закон усиления, создать развертку типа “Б”. Дефектоскоп содержит излучающий ПЭП, подключенный к генератору высокочастотных импульсов, приемное устройство, состоящее из последовательно соединенных аттенюатора и усилителя высокой частоты, подключенное с помощью переключателя к излучающему или приемному преобразователю, генератор счетных импульсов, формирователь кода, блок программного управления, оперативное запоминающее устройство, клавиатуру и индикаторное устройство, причем блок программного управления соединен с аттенюатором, формирователем кода, оперативным запоминающим устройством и клавиатурой. Известный дефектоскоп дополнительно содержит последовательно соединенную цепь из аналого-цифрового преобразователя, контроллера прямого доступа к памяти и контроллера прерываний, подключенную к выходу высокочастотного усилителя, причем контроллер прямого доступа к памяти соединен с генератором высокочастотных импульсов, генератором счетных импульсов и оперативным запоминающим устройством, контроллер прерываний подключен к блоку программного управления, а последний к индикаторному устройству.
Недостатком известного устройства является то, что оно не позволяет осуществить автоматизацию определения диаграммы направленности ПЭП с отображением ее на экране индикаторного устройства.
Технической задачей, решаемой изобретением, является расширение функциональных возможностей прототипа в части осуществления автоматического определения диаграмм направленности ПЭП, отображения полученных результатов на экране индикаторного устройства или внешнем визуализирующем устройстве, сокращение трудозатрат на наладку и настройку, а также повышение достоверности, точности измерений.
Раскрытие изобретения в части устройства.
Предложенное устройство содержит, как и прототип, излучающий ПЭП, подключенный к генератору высокочастотных импульсов, приемное устройство, в состав которого входит последовательное соединение аттенюатора и усилителя, подключенное к излучающему или приемному ПЭП с помощью переключателя, блок программного управления, оперативное запоминающее устройство, клавиатуру, индикаторное устройство, последовательно соединенные генератор счетных импульсов и формирователь кода, подключенный к блоку программного управления, с которым соединены аттенюатор, оперативное запоминающее устройство и клавиатура, последовательно соединенную цепь из аналого-цифрового преобразователя, контроллера прямого доступа к памяти и контроллера прерываний, подключенную к выходу приемного устройства, причем контроллер прямого доступа к памяти соединен с генератором высокочастотных импульсов, генератором счетных импульсов и оперативным запоминающим устройством, контроллер прерываний подключен к блоку программного управления, а последний - к индикаторному устройству.
Поставленная задача достигается за счет того, что в отличие от известного устройства в предлагаемое устройство дополнительно введены VGA порт и модуль обработки сигналов, состоящий из блока фильтрации, блока накопления, блока определения диаграммы направленности, соединенных последовательно, и блока распределения задач, соединенного параллельно с блоком фильтрации, блоком накопления и блоком определения диаграммы направленности. Модуль обработки сигналов подключен к блоку программного управления, а выходы модуля подключены к индикаторному устройству и VGA порту.
Структурная схема предлагаемого устройства для определения диаграммы направленности приведена на фиг. 2.
Предлагаемое устройство состоит из генератора высокочастотных импульсов 4, излучающего И и приемного П или приемно-излучающего ПИ (в зависимости от режима работы) ПЭП 1, ключа 5, приемного устройства 6, включающего в себя аттенюатор 7 и усилитель 8, блока программного управления 9, аналого-цифрового преобразователя 10, контроллера прямого доступа к памяти 11, оперативного запоминающего устройства 12, контроллера прерываний 13, генератора счетных импульсов 14, формирователя кода 15, индикаторного устройства 16, клавиатуры 17, модуля обработки сигналов 18, который состоит из блока фильтрации 19, блока накопления 20, блока определения диаграммы направленности 21 и блока распределения задач 22 для формирования на экране индикаторного устройства 16 диаграммы направленности ПЭП, а также VGA порта 23 для отображения на внешнем устройстве диаграммы направленности ПЭП.
Устройство работает следующим образом.
Широкополосный генератор высокочастотных импульсов 4 вырабатывает радиоимпульсы, возбуждающие ПЭП 1 (в режиме прием-излучение). Формирование диаграммы направленности производится в положении ключа 5, соответствующем совмещенной схеме работы ПЭП 1. Импульсные эхо-сигналы, снимаемые с ПЭП 1, поступают на вход аттенюатора 7, который обеспечивает требуемый динамический диапазон усиления и управляется цифровым кодом от блока программного управления 9. Для преобразования сигналов из аналоговой в цифровую форму на выходе усилителя 8 установлен аналого-цифровой преобразователь 10. АЦП 10 работает совместно с контроллером прямого доступа к памяти (ПДП) 11, который формирует для него сигналы синхронизации, считывает цифровую информацию, накапливает ее и заносит в оперативное запоминающее устройство (ОЗУ) 12. Кроме этого, контроллер ПДП 11 используется для формирования управляющих сигналов на генератор высокочастотных импульсов 4, контроллер прерываний 13 и генератор счетных импульсов 14 и обеспечивает синхронизацию между моментом возбуждения преобразователя 1 и считыванием данных. Для записи информации в ОЗУ 12 контроллер ПДП 11 формирует адресные и управляющие сигналы.
Контроллер прерываний 13 необходим для разделения во времени сигналов контроллера ПДП 11 и блока программного управления 9 на общую шину данных и адреса.
В момент запуска генератора импульсов высокой частоты 4 контроллер ПДП 11 запускает генератор счетных импульсов 14, работа которого прерывается измеряемым эхо-сигналом. При этом осуществляется подсчет числа этих импульсов и формирователь кода 15 преобразует соответствующий временной интервал в цифровой код и передает его в блок программного управления 9, который осуществляет измерение амплитуды эхо-сигнала U и времени его прихода t. Измеренные данные эхо-сигнала: амплитуда U и время его прихода t поступают в модуль обработки сигналов 18. В модуле обработки сигналов 18, в блоке фильтрации 19 происходит отброс статистически значимых сдвигов по трем точкам для определения средней амплитуды эхо-сигнала U при данном времени его прихода t предварительно поступивших данных.
Статистически обработанные данные поступают из блока фильтрации 19 в блок накопления 20, который позволяет накопить и хранить необходимый объем данных, статистически обработанных блоком фильтрации 19, достаточный для их дальнейшей обработки блоком определения диаграммы направленности 21. Блок 21 позволяет, после накопления достаточного объема статистически обработанных данных, рассчитать по времени прихода t значение расстояния r от точки выхода луча ПЭП до отражателя, где с - скорость ультразвуковой волны в образце задается с клавиатуры 17, и угол ввода ультразвука, зная глубину залегания отражателя, которую задают с клавиатуры 17. Далее блок определения диаграммы направленности 21 производит:
- из ряда рассчитанных углов ввода выбор значения α0, соответствующее максимуму эхо-сигнала U(α0);
- обработку результата измерений и расчета по алгоритму;
- отображение полученного результата в виде диаграммы направленности ПЭП на экране индикаторного устройства либо на внешнем устройстве с помощь VGA порта 23.
В модуль обработки сигналов входит блок распределения задач 22, который соединен с блоком фильтрации 19, блоком накопления 20 и блоком определения диаграммы направленности 21. Блок распределения задач 22 формирует управляющие сигналы для блока фильтрации 19 и блока накопления 20, а также запускает обработку сигналов блоком определения диаграммы направленности 21 с последующим отображением результатов определения диаграммы направленности на индикаторном устройстве 16.
Клавиатура 17 позволяет осуществить выбор выполняемых устройством функций, ввод постоянных (скорость ультразвуковых волн, угол ввода луча, толщина изделия, глубина отражателя), вывод на индикатор измеренных значений о результатах контроля или диаграммы направленности ПЭП, вывод информации на печать.
Достигаемым техническим результатом является осуществление автоматического расчета угла ввода в каждой точке по времени прихода эхо-сигнала при известной глубине и скорости распространения ультразвука в материале образца и определение диаграммы направленности ПЭП, а также отображение полученных результатов на экране индикаторного устройства или внешнем визуализирующем устройстве, что приводит к сокращению трудозатрат на наладку и настройку, к повышению достоверности, точности измерений, а также надежности контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ ИНДИКАТРИСЫ РАССЕЯНИЯ ДЕФЕКТА ПРИ УЛЬТРАЗВУКОВОМ КОНТРОЛЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2581083C1 |
| УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОП | 1999 |
|
RU2168723C2 |
| Анализатор дефектов к ультразвуковому дефектоскопу | 1988 |
|
SU1585751A1 |
| СПОСОБ ПОВЕРКИ УЛЬТРАЗВУКОВЫХ ЭХО-ИМПУЛЬСНЫХ ПРИБОРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2087908C1 |
| СПОСОБ ПРОВЕРКИ РАБОТОСПОСОБНОСТИ УЛЬТРАЗВУКОВОГО ДЕФЕКТОСКОПА | 2004 |
|
RU2262101C1 |
| СПОСОБ ИМИТАЦИИ ДЕФЕКТОВ ПРИ УЛЬТРАЗВУКОВОМ КОНТРОЛЕ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2278377C2 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2137120C1 |
| Способ определения ширины диаграммы направленности ультразвуковых преобразователей и дефектоскопов и устройство для осуществления способа | 1980 |
|
SU900179A1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ РАБОТОСПОСОБНОСТИ УЛЬТРАЗВУКОВОГО ДЕФЕКТОСКОПА | 1994 |
|
RU2104519C1 |
| МНОГОПАРАМЕТРИЧЕСКИЙ ДЕФЕКТОСКОП | 1997 |
|
RU2123687C1 |
Использование: для определения диаграммы направленности пьезоэлектрического преобразователя (ПЭП). Сущность изобретения заключается в том, что перемещают ПЭП по образцу с ненаправленным отражателем, измеряя амплитуды U и времена прихода эхо-сигналов t в произвольных точках образца, выполняют расчет угла ввода при известной глубине отражателя h и скорости распространения ультразвука в образце c по формуле α=arccos(2h/ct), после чего определяют диаграмму направленности. Технический результат: повышение достоверности и точности измерений. 2 н.п. ф-лы, 2 ил.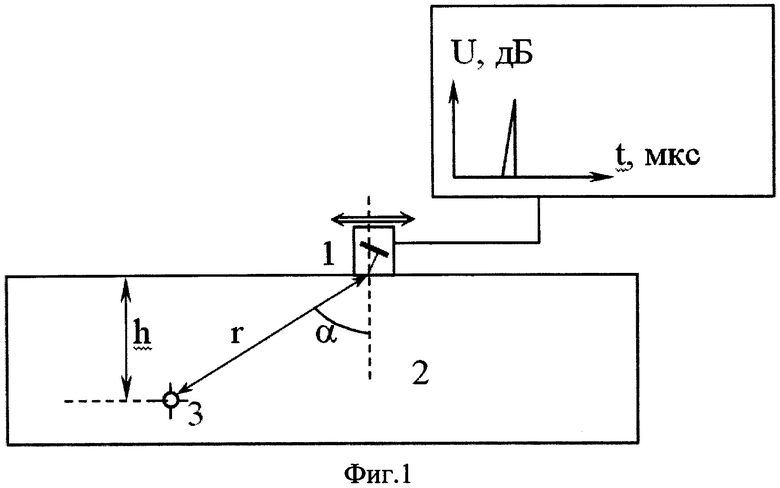
1. Способ определения диаграммы направленности пьезоэлектрического преобразователя путем его перемещения по образцу в пределах регистрации сигнала от ненаправленного отражателя на основании данных по амплитуде и углу ввода ультразвука, отличающийся тем, что угол ввода ультразвука рассчитывают, для чего производят одновременное измерение амплитуды U и времени прихода эхо-сигналов t в произвольных точках образца, при известной глубине отражателя h и скорости распространения ультразвука в образце с, причем расчет угла ввода по формуле α=arccos (2h/ct) и последующее определение диаграммы направленности осуществляют в устройстве, заявленном в п. 2.
2. Устройство автоматизированного определения диаграммы направленности ПЭП для способа, заявленного по п. 1, содержащее излучающий ПЭП, подключенный к генератору высокочастотных импульсов, приемное устройство, в состав которого входит последовательное соединение аттенюатора и усилителя высокой частоты, подключенное к излучающему или приемному ПЭП с помощью переключателя, блок программного управления, оперативное запоминающее устройство, клавиатура, индикаторное устройство, последовательно соединенные генератор счетных импульсов и формирователь кода, подключенный к блоку программного управления, с которым соединены аттенюатор, оперативное запоминающее устройство и клавиатура, последовательно соединенную цепь из аналого-цифрового преобразователя, контроллера прямого доступа к памяти и контроллера прерываний, подключенную, к выходу приемного устройства, причем контроллер прямого доступа к памяти соединен с генератором высокочастотных импульсов, генератором счетных импульсов и оперативным запоминающим устройством, контроллер прерываний подключен к блоку программного управления, а последний - к индикаторному устройству, отличающееся тем, что к блоку программного
управления дополнительно подключен модуль обработки сигналов, выходы которого подключены к индикаторному устройству и VGA порту, состоящий из блока фильтрации, блока накопления, блока определения диаграммы направленности, соединенных последовательно, и блока распределения задач, соединенного параллельно с блоком фильтрации, блоком накопления и блоком определения диаграммы направленности.
| Гурвич А.К., Кузьмина Л.И., Справочные диаграммы направленности искателей ультразвуковых дефектоскопов, Киев, Техника, 1980, с | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| ИЗМЕРИТЕЛЬ ДИАГРАММЫ НАПРАВЛЕННОСТИ ПЬЕЗОЭЛЕКТРИЧЕСКИХ ИЗЛУЧАТЕЛЕЙ | 0 |
|
SU351185A1 |

