Изобретение относится к области гидроакустики и предназначено для распознавания морских судов по их шумоизлучению.
Одним из основных источников первичного гидроакустического поля морских судов являются гребные винты, которые создают вибрации на двух дискретных частотах: на частоте, соответствующей скорости вращения вала (вальная частота), и на частоте, равной произведению частоты вращения вала и количества лопастей винта (лопастная частота) [1, 2]. У современных судов вальные частоты лежат в интервале 2…6 Гц, а лопастные - 6…24 Гц [7]. Вследствие этого, и в силу нелинейных эффектов, происходящих при излучении, в наблюдаемом гидроакустическими средствами низкочастотном спектре шума судов среди гармоник с близкими амплитудами, которые составляют сплошную часть спектра, образуется совокупность гармоник большей амплитуды с кратными частотами. Гармоники, амплитуда которых превышает сплошную часть спектра, обычно называют дискретными составляющими. Совокупность дискретных составляющих с кратными частотами называется звукорядом. Звукоряд, обусловленный вибрациями гребного винта, называется вально-лопастным звукорядом. В едином вально-лопастном звукоряде можно выделить дискретные составляющие вального звукоряда и дискретные составляющие лопастного звукоряда. Основная (первая по оси частот) частота вального звукоряда равна частоте (скорости) вращения вала, которая, в свою очередь, задает скорость движения судна [2, 3]. Основная частота лопастного звукоряда равна произведению частоты вращения вала и количества лопастей винта. Таким образом, вально-лопастной звукоряд содержит информацию, в том числе, о количестве лопастей гребного винта, которую используют в системах распознавания целей, основанных на особенностях спектрального состава сигнала [4].
В связи с тем, что в современных гидроакустических средствах решающая роль в принятии окончательного решения принадлежит человеку [6], оценка количества лопастей винта производится оператором на основании предъявляемой информации о параметрах спектра сигнала, содержащего вально-лопастной звукоряд.
Известен способ вейвлет-анализа для обнаружения гидроакустического сигнала в виде звукоряда с возможностью измерения основной частоты вального звукоряда, реализуемый устройством обнаружения сигналов [3].
Известен способ спектрального анализа с последовательным обнаружением отдельных дискретных составляющих и построением звукорядов [7].
Эти и другие способы-аналоги узкополосного частотного анализа сигнала, например [4], для решения оператором задачи оценки количества лопастей винта реализуют на выходе представление информации двух видов:
- график спектра сигнала;
- таблица параметров обнаруженных дискретных составляющих и (или) звукорядов.
На основании анализа графика спектра сигнала оператор производит визуальную идентификацию гармоник спектра для выявления среди них основной вальной и основной лопастной дискретных составляющих. Дискретные составляющие идентифицируются как вальная и как лопастная при наблюдении единого вально-лопастного звукоряда: вальная - это первая по порядку дискретная составляющая звукоряда; лопастная - одна из последующих с максимальной амплитудой.
Из таблицы параметров обнаруженных дискретных составляющих оператор считывает частоту основной вальной и частоту основной лопастной дискретных составляющих вально-лопастного звукоряда.
На основании совокупной информации графика и таблицы оператор определяет количество лопастей винта, пользуясь известным соотношением [1, 2, 3]:
где fЛ - основная частота лопастного звукоряда;
fв - основная частота вального звукоряда (является функцией скорости движения объекта [2, 3]);
z - количество лопастей винта.
Количество лопастей винта определяется как частное от деления основной частоты лопастного звукоряда на основную частоту вального звукоряда.
Однако представляемая оператору информация в рассмотренных способах-аналогах не обладает достаточными полнотой и качеством для оценки количества лопастей винта.
Это связано с двумя моментами, затрудняющими и обнаружение дискретных составляющих, и формирование параметров звукорядов, и поиск основных частот звукорядов, и визуальную идентификацию гармоник спектра с дискретными составляющими, образующими вально-лопастной звукоряд:
- отдельные дискретные составляющие вального или лопастного звукорядов могут не проявляться среди гармоник спектра [7];
- среди гармоник спектра могут присутствовать дискретные составляющие, обусловленные не вибрациями вала и винта, а другими источниками звука [4, 8].
Наиболее близким аналогом по совокупности признаков к предлагаемому изобретению является способ оценки количества лопастей винта путем определения характеристик звукорядов [5], который принят за прототип.
В способе-прототипе выполняются следующие операции: прием сигнала шумящего объекта гидроакустической антенной; аналого-цифровое преобразование; полосовая фильтрация; вычисление спектра сигнала методом БПФ; обнаружение отдельных дискретных составляющих, амплитуда которых превышает сплошной уровень гармоник спектра; поиск основных частот каждого звукоряда; формирование звукорядов в виде таблиц их параметров; отображение графика спектра сигнала и таблиц параметров звукорядов; оценка количества лопастей винта оператором.
Недостатки способа-прототипа можно разделить на две составляющие: в части алгоритмического обеспечения и в части отображения информации.
В части алгоритмического обеспечения - способ-прототип содержит сложную процедуру обнаружения отдельных дискретных составляющих, результат которой для каждой дискретной составляющей является случайным событием, характеризующимся вероятностью правильного и ложного решения. Кроме того, способ-прототип содержит слабоформализованную (эвристическую) процедуру поиска основных частот каждого звукоряда. Эти процедуры уменьшают достоверность и робастность информации, используемой далее для оценки количества лопастей винта.
В части отображения информации - способ-прототип предполагает отображение информации традиционного вида (график спектра + таблица обнаруженных дискретных составляющих). В большом объеме информации такого вида информация о количестве лопастей винта занимает незначительную часть и вычленить ее способен только опытный оператор-гидроакустик.
Задачей заявляемого способа является повышение достоверности информации о количестве лопастей винта и повышение наглядности ее отображения для оператора. При этом заявляемый способ должен быть работоспособен при любой, заранее неизвестной, скорости движения объекта шумоизлучения.
Техническим результатом изобретения является выявление в спектре наблюдаемого сигнала информации, характеризующей количество лопастей винта и наглядное, интуитивно-понятное отображение этой информации инвариантно к скорости движения объекта, без процедур обнаружения отдельных дискретных составляющих, формирования звукорядов и поиска основных частот звукорядов, что, в свою очередь, увеличивает робастность алгоритма, оптимизирует условия работы оператора в части оценки количества лопастей винта и уменьшает время принятия решения.
Для обеспечения заявленного технического результата в способ оценки количества лопастей путем определения характеристик звукорядов, включающий: прием сигнала шумящего объекта гидроакустической антенной; аналого-цифровое преобразование; полосовая фильтрация; вычисление спектра сигнала, введены новые признаки, а именно:
находят в исследуемом спектре сигнала частоту гармоники максимальной амплитуды fmах, считая ее основной частотой лопастного звукоряда fЛ; прогнозируют частоты вальных звукорядов fв(i)=fЛ/z(i), где z(i)=3÷8 -гипотезы о количестве лопастей винта шумящего объекта; формируют N эталонных спектров S(i)=cos(2πf·z(i)/fmax). где S(i) - эталонный спектр для гипотезы о количестве лопастей номер i, содержащий вально-лопастной звукоряд, характерный для количества лопастей винта z(i); вычисляют для каждого S(i) его меру сходства Ki со спектром исследуемого сигнала; строят график путем наложения друг на друга N фигур, каждая из которых представляет собой построенный в полярных координатах график функции R(φ)=K(i)·cos(φ·z(i)), φ∈(0,2π), и если результирующая фигура подобна контуру винта с z(i) лопастями, то делают вывод, что у наблюдаемого шумящего объекта количество лопастей z(i).
Покажем возможность достижения указанного технического результата предложенным способом.
Заявляемый способ производит оценку количества лопастей винта методом выбора ближайшего эталона по критерию минимума расстояния [12] для N практически возможных гипотез о количестве лопастей винта. Наиболее распространенными можно считать винты с количеством лопастей три и четыре [9, 10]. В литературных источниках упоминаются винты с количеством лопастей от двух до восьми [10, 11]. В связи с этим, при практической реализации способа, можно ограничить количество гипотез о количестве лопастей винта.
После процедуры БПФ среди всех гармоник спектра находят гармонику максимальной амплитуды, предполагают, что это - первая (основная) дискретная составляющая лопастного звукоряда и считывают ее частоту. Эти операции не требуют выполнения сложных процедур обнаружения дискретных составляющих и поиска основной частоты звукоряда [5], и, следовательно, их результат не является случайным событием, характеризующимся вероятностью правильного и ложного решения. Таким образом, робастность предлагаемого способа по отношению к способам, предполагающим последовательное обнаружение отдельных дискретных составляющих и поиск основных частот звукорядов, повышается.
После того как основная частота лопастного звукоряда найдена, используя известное соотношение между основной частотой лопастного звукоряда и основной частотой вального звукоряда [3], можно прогнозировать основную частоту вального звукоряда для N заданных гипотез о количестве лопастей винта:
где fв(i) - основная частота вального звукоряда для гипотезы о количестве лопастей винта номер i (i=1, 2,…N);
fЛ - основная частота лопастного звукоряда;
z(i) - гипотеза о количестве лопастей винта номер i.
Соотношение между основной частотой вального звукоряда и основной частотой лопастного звукоряда зависит от количества лопастей винта и не зависит от скорости движения объекта [1, 3]. В связи с этим, заявляемый способ, использующий соотношение между этими частотами для прогноза основной вальной частоты, будет работоспособен при любой скорости движения объекта.
Способ предполагает далее оперативное формирование N эталонных спектров для N гипотез о количестве лопастей винта. Каждый эталонный спектр должен характеризовать форму спектра сигнала, генерируемого винтом с количеством лопастей z(i), то есть содержать подобие вально-лопастного звукоряда дискретных составляющих с основной частотой, выработанной на предыдущем шаге для гипотезы номер i. В заявляемом способе формирование эталонных спектров производится с использованием гармонических функций косинус на шкале частот спектра с периодами, равными значениям основных частот вального звукоряда для всех гипотез. Такое формирование эталонных спектров позволяет на интервале по оси частот от нуля до основной лопастной частоты разместить z(i) периодов функции косинус, что будет характеризовать наличие в спектре сигнала вально-лопастного звукоряда, генерируемого винтом с количеством лопастей z(i).
Далее для каждого эталонного спектра вычисляют его меру сходства со спектром исследуемого сигнала. Наиболее подходящей из известных мер сходства (Евклидово расстояние, расстояние Махаланобиса, коэффициент корреляции и др. [12]) представляется мера Орсини, которая характеризует линейную зависимость сравниваемых параметров и представляет собой косинус угла, образованного векторами параметров. Динамический диапазон косинусной меры сходства (меры Орсини) ограничен значениями от 0 (совсем не похоже) до 1 (полное совпадение).
Далее, для обеспечения наглядной оценки количества лопастей винта оператором, необходимо отображать все полученные значения мер сходства одновременно с отображением гипотез о количестве лопастей винта, для которых они были получены. Удачным выбором может стать представление информации в полярных координатах, которое позволяет использовать в данном случае интуитивно-понятную форму отображения [13] - нарисовать фигуру, подобную контуру винта объекта. Это оптимизирует условия работы оператора и ускорит принятие решения о количестве лопастей винта наблюдаемого объекта.
Результирующую фигуру строят в полярных координатах путем наложения друг на друга N фигур-гипотез, контур каждой из которых подобен контуру винта с количеством лопастей согласно гипотезе i, а размер определяется соответствующим этой гипотезе значением меры сходства. Размер результирующей фигуры будет определяться максимальным значением меры сходства, а ее контур - правдоподобностью гипотез о количестве лопастей винта. Если размеры всех фигур-гипотез будут близки между собой и малы, то на индикаторе будет наблюдаться некий образ малого размера, по которому можно судить о невозможности оценки количества лопастей винта. Если фигура-гипотеза, размер которой окажется максимальным и близким к единице, перекроет для наблюдателя все остальные фигуры-гипотезы, то на индикаторе будет наблюдаться четкая результирующая фигура, подобная контуру винта с наиболее вероятным числом лопастей, решение о количестве лопастей винта будет принято.
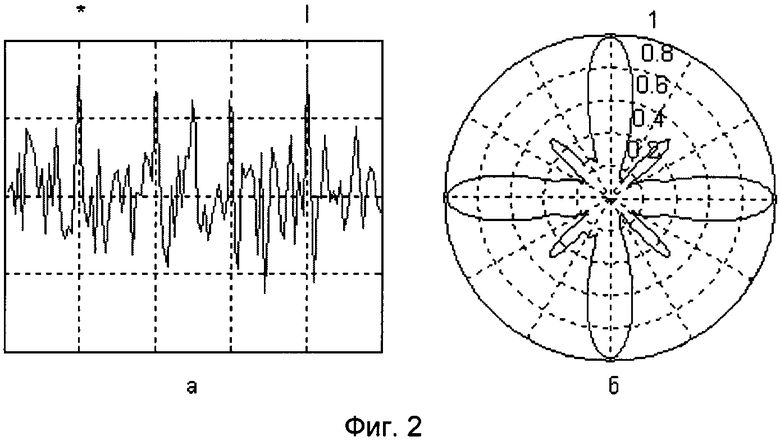
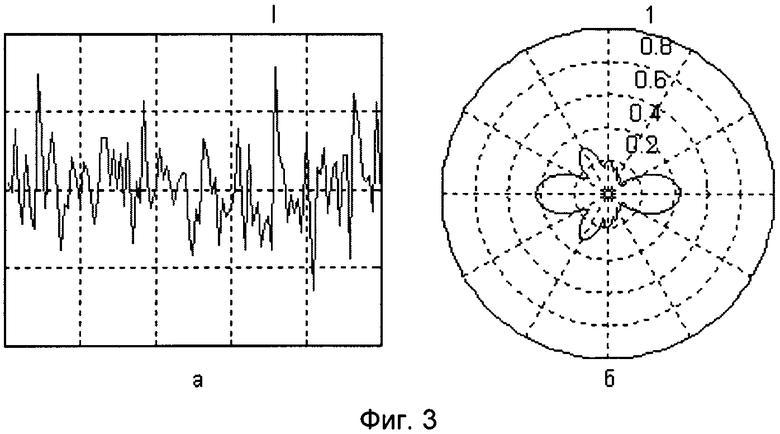
Сущность изобретения поясняется фиг. 1-3, на которых показаны результаты моделирования информации о количестве лопастей винта по предложенному способу (фиг. 1б, 2б, 3б) и по спектрам наблюдаемого сигнала (фиг. 1а, 2а, 3а).
Фиг. 1 - отношение между основной частотой лопастного звукоряда и основной частотой вального звукоряда равно пяти (пятилопастной винт). Фиг. 2 - отношение между основной частотой лопастного звукоряда и основной частотой вального звукоряда равно четырем (четырехлопастной винт). Фиг. 3 - дискретные составляющие не образуют звукоряд (количество лопастей не определяется).
На фиг. 1а, 2а, 3а символами обозначены: гармоника максимальной амплитуды (основная дискретная составляющая лопастного звукоряда) - символ «I» (палочка); основная дискретная составляющая лопастного звукоряда - символ «*» (звездочка).
Пример реализации предлагаемого способа:
- производят прием сигнала шумящего объекта гидроакустической антенной;
- производят аналого-цифровое преобразование и полосовую фильтрацию в диапазоне частот вально-лопастного звукоряда;
- вычисляют спектр сигнала методом БПФ;
- находят в спектре сигнала F частоту fmах гармоники с максимальной амплитудой;
-формируют N эталонных спектров S(i) для N гипотез о количестве лопастей винта z(i) (z(1)=2, z(3)=3,… z(N)=8) с учетом частоты гармоники максимальной амплитуды:

где 2πf - круговая частота;
z(i)/fmax - период эталонного спектра для гипотезы i, равный отношению количества лопастей винта к частоте гармоники максимальной амплитуды;
- вычисляют N значений косинусной меры сходства Орсини K(i) между спектром исследуемого сигнала F и эталонными спектрами S(i):
где F - спектр наблюдаемого сигнала;
S(i) -эталонный спектр для гипотезы номер i;
Аmах - наибольшая амплитуда гармоник исследуемого спектра;
z(i) - гипотеза о количестве лопастей винта номер i.
- строят график в полярных координатах путем наложения друг на друга N фигур, контур каждой из которых R(φ) подобен контуру винта с количеством лопастей согласно гипотезе i, а размер определяется соответствующим этой гипотезе значением косинусной меры сходства (отрицательные значения обнуляются):

Работоспособность способа подтверждена статистическим моделированием, результаты которого приведены на рисунках.
При моделировании опускались процедуры приема сигнала шумящего объекта гидроакустической антенной; аналого-цифровое преобразование и полосовая фильтрация в диапазоне частот вально-лопастного звукоряда.
На вход алгоритма подавались случайные реализации цифрового сигнала, полученные как аддитивная смесь белого шума и совокупности тональных сигналов. Частоты тональных сигналов и количество тональных сигналов задавались таким образом, чтобы имитировать вально-лопастной звукоряд в спектре сигнала. Выполнялась процедура БПФ для получения спектра сигнала и далее все процедуры заявляемого способа оценки количества лопастей винта.
На основании спектров сигналов, приведенных на фиг. 1а, 2а, 3а, в результате работы алгоритма предлагаемого способа получены результирующие фиг. 1б, 2б, 3б. Амплитуда результирующих фигур близка к единице в случаях, когда спектр сигнала содержит вально-лопастной звукоряд (фиг. 1 и фиг. 2). Амплитуда фигуры значительно меньше единицы для случая предъявления спектра сигнала без звукоряда дискретных составляющих (фиг. 3).
Из анализа рисунков видно, что оценка количества лопастей винта во всех случаях производится верно:
- для предъявляемого спектра с пятью дискретными составляющими вального звукоряда (фиг. 1а) получена фигура, подобная контуру винта с пятью лопастями (фиг. 1б);
- для предъявляемого спектра с количеством дискретных составляющих вального звукоряда четыре (фиг. 2а) получена фигура, подобная контуру винта с количеством лопастей четыре (фиг. 2б);
- для предъявляемого спектра без вально-лопастного звукоряда (фиг. 3а) получена фигура, на основании которой оценка количества лопастей винта невозможна (фиг. 3б).
Необходимо отметить, что для случаев фиг. 1 и фиг. 2 имитировалась различная основная частота вального звукоряда, что будет наблюдаться при различной скорости вращения вала винта, и, следовательно, можно предполагать различную скорость движения судна. Несмотря на это оценка количества лопастей винта во всех случаях производится верно.
Все изложенное позволяет считать задачу изобретения решенной: предложен способ оценки количества лопастей винта шумящего в море объекта, который может быть использован в гидроакустических пассивных средствах обнаружения для распознавания морских судов по их шумоизлучению.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Урик Р.Дж. Основы гидроакустики / Пер. с англ. - Л.: Судостроение. 1978. 448 с.
2. Евтютов А.П., Митько В.Б. Примеры инженерных расчетов в гидроакустике. - Л.: Судостроение. 1981. 265 с.
3. Малый В.В., Сапрыкин В.А., Рохманийко А.Ю., Есипов B.C., Якунин К.В. Устройство обнаружения шумовых гидроакустических сигналов в виде звукоряда на основе вычисления интегрального вейвлет-спектра. Патент на изобретение РФ №2464588 от 20.10.2012 с приоритетом от 15.06.2011
4. Бурдик B.C. Анализ гидроакустических систем. - Л.: Судостроение. 1988. 392 с., аналог - с. 364.
5. Анализ информации оператором-гидроакустиком / В.В. Деев, Ю.М. Забродин, А.П. Пахомов и др. - Л.: Судостроение. 1989. 192 с., протоип - с. 111.
6. Справочник по гидроакустике / А.П. Евтютов, А.Е. Колесников, Е.А. Корепин и др. - Л.: Судостроение. 1988. 552 с.
7. Кудрявцев А.А., Лугинец К.П., Машошин А.И. Об амплитудной модуляции подводного шумоизлучения гражданских судов // Акустический журнал - 2003. Том 49. №2. С. 224-228.
8. Мясников Л.Л., Мясникова Е.Н. Автоматическое распознавание звуковых образов. - Л.: Энергия. 1970. 183 с.
9. Антоненко С.В. Судовые движители: учебное пособие. - Владивосток: Издательство ДВГТУ. 2007. 125 с.
10. Хейфиц Л.Л. Гребные винты для катеров. - Л.: Судостроение. 1980. 200 с.
11. Руководство по расчету и проектированию гребных винтов судов внутреннего плавания / Под редакцией Басина А.М., Степанюка Е.И. - Л.: Транспорт.1977. 268 с.
12. Ту Дж., Гонсалес Р. Принципы распознавания образов / Пер. с англ. М.: Мир. 1978.
13. Гришин В.Г. Образный анализ экспериментальных данных - М.: Наука. 1982. 236 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оценки количества лопастей винта шумящего в море объекта | 2019 |
|
RU2713989C1 |
| Способ определения маневра шумящего объекта | 2019 |
|
RU2719626C1 |
| Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот | 2019 |
|
RU2718144C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ УЗКОПОЛОСНЫХ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2007 |
|
RU2367970C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ В ВИДЕ ЗВУКОРЯДА НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2011 |
|
RU2464588C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2016 |
|
RU2624798C1 |
| Способ определения изменения скорости движения шумящего объекта | 2020 |
|
RU2757075C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2020 |
|
RU2754602C1 |
| Способ панорамной классификации шумящих объектов | 2017 |
|
RU2684439C1 |
| Способ классификации шумоизлучения морского объекта | 2021 |
|
RU2776958C1 |
Использование: изобретение относится к области гидроакустики и предназначено для распознавания морских судов по их шумоизлучению. Сущность: исследуют спектр шумового сигнала морского судна. В исследуемом спектре сигнала находят частоту гармоники максимальной амплитуды и предполагают, что это - основная частота лопастного звукоряда. Формируют N эталонных спектров для N гипотез о количестве лопастей гребного винта. Вычисляют для каждого эталонного спектра его меру сходства со спектром исследуемого сигнала. Строят график в полярных координатах для функции, зависящей от гипотез о количестве лопастей и мер сходства для каждой гипотезы. Делают вывод о количестве лопастей винта в случае, если результирующая фигура подобна контуру винта с определенным количеством лопастей. Технический результат: выявление в спектре наблюдаемого сигнала информации, характеризующей количество лопастей винта и наглядное, интуитивно-понятное отображение этой информации инвариантно к скорости движения объекта. 1 з.п. ф-лы, 3 ил.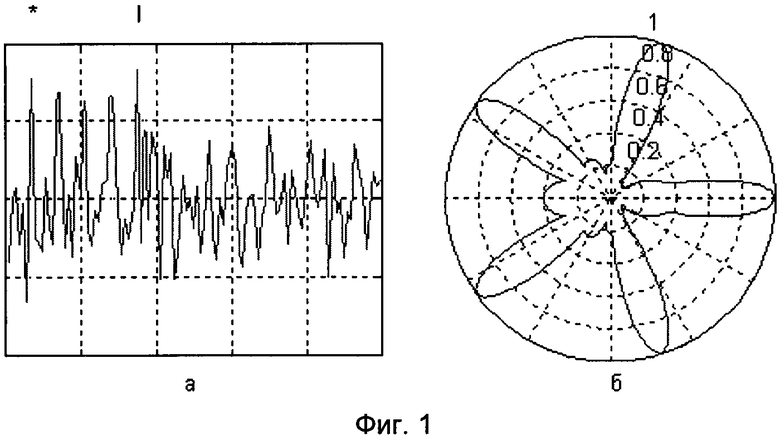
1. Способ оценки количества лопастей винта шумящего в море объекта, включающий прием сигнала шумящего объекта гидроакустической антенной; аналого-цифровое преобразование; полосовую фильтрацию; вычисление спектра сигнала отличающийся тем, что находят в исследуемом спектре сигнала частоту гармоники максимальной амплитуды fmax, считая ее основной частотой лопастного звукоряда fл; прогнозируют частоты вальных звукорядов fв(i)=fл/z(i), где z(i)=3÷8 - гипотезы о количестве лопастей винта шумящего объекта; формируют N эталонных спектров S(i)=cos(2πf∗z(i)/fmax), где S(i) - эталонный спектр для гипотезы о количестве лопастей номер i, содержащий вально-лопастной звукоряд, характерный для количества лопастей винта z(i); вычисляют для каждого S(i) его меру сходства Ki со спектром исследуемого сигнала; строят график путем наложения друг на друга N фигур, каждая из которых представляет собой построенный в полярных координатах график функции R(φ)=K(i)∗cos(φ∗z(i))′ φ∈(0,2π)′, и если результирующая фигура подобна контуру винта с z(i) лопастями, то делают вывод, что у наблюдаемого шумящего объекта количество лопастей z(i).
2. Способ по п. 1, отличающийся тем, что значение меры сходства Ki определяют по формуле  , где F - спектр исследуемого сигнала; S(i) - эталонный спектр для гипотезы номер, i; z(i) - гипотеза о количестве лопастей винта номер i; Amax - наибольшая амплитуда гармоник спектра.
, где F - спектр исследуемого сигнала; S(i) - эталонный спектр для гипотезы номер, i; z(i) - гипотеза о количестве лопастей винта номер i; Amax - наибольшая амплитуда гармоник спектра.
| RU94036233 A1, 20.07.1996 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ | 1995 |
|
RU2110810C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| СПОСОБ ПОЛУЧЕНИЯ ХЛЕБНОГО КВАСА | 2015 |
|
RU2590032C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НИЗКОЧАСТОТНЫХ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1995 |
|
RU2096808C1 |
| US4200871 A1, 29.04.1980. | |||

