Изобретение относится к области гидроакустики, может быть использовано при решении задач обработки сигнала шумоизлучения объекта в гидроакустических системах и предназначено для определения параметров движения обнаруженного объекта.
Под маневром объекта обычно понимается либо изменение курса движения объекта (маневр курсом), либо изменение скорости его движения (маневр скоростью). Известны способы, позволяющие определять момент маневра шумящего объекта при визуальном слежении за ним [1-3]. Способ [1] позволяет определить момент маневра объекта курсом, и основан на анализе изменения пеленга на движущийся объект. При стабильном характере изменения пеленга считают, что маневр отсутствует. При резком изменении значения пеленга принимают решение о наличии маневра объекта. Способы [2, 3] позволяют определить момент маневра объекта скоростью, и основаны на анализе изменения уровня сигнала, принятого от объекта. При стабильном характере изменения уровня сигнала считают, что маневр отсутствует. При резком изменении значения уровня сигнала принимают решение о наличии маневра объекта. Недостатком этих способов является необходимость постоянного визуального наблюдения за объектом, что становится практически невозможным при большом количестве одновременно наблюдаемых объектов.
Наиболее близким аналогом по решаемым задачам и выполняемым процедурам к предлагаемому изобретению является способ определения маневра шумящего объекта [4], который принят за прототип.
В способе-прототипе выполняются следующие операции:
принимают шумовой сигнал объекта гидроакустической антенной,
осуществляют непрерывную обработку принятого сигнала в высокочастотном диапазоне шумоизлучения с определением его спектрального состава в последовательные моменты времени, разделенные интервалом накопления,
определяют энергию сигнала и коэффициенты корреляции между спектрами сигнала в последовательные моменты времени,
и определяют момент маневра обнаруженного объекта на основании анализа энергии сигнала и коэффициентов корреляции.
Способ позволяет определять момент маневра обнаруженного объекта и курсом и скоростью автоматически, без участия оператора. Однако, указанный способ очень чувствителен к выбору интервала времени накопления сигнала, поскольку основан на анализе изменения стационарности сигнала от объекта, что и указано в [4]. При большом интервале времени накопления теряется возможность определить момент потери сигналом стационарности, поскольку коэффициент корреляции, вычисленный между моментами времени, разделенными большим интервалом, всегда будет низким. При малом интервале времени накопления резко падает помехоустойчивость при вычислении коэффициента корреляции, что может приводить к ошибкам определения момента потери сигналом стационарности.
Задачей заявляемого способа является повышение достоверности при автоматическом определении момента маневра скоростью для шумящего объекта.
Для решения поставленной задачи, в способ определения маневра шумящего объекта, в котором принимают шумовой сигнал объекта гидроакустической антенной, осуществляют непрерывную обработку принятого сигнала с определением его спектрального состава в последовательные моменты времени, и определяют момент маневра обнаруженного объекта,
введены новые признаки, а именно:
обработку принятого сигнала осуществляют в низкочастотном диапазоне шумоизлучения,
производят анализ спектрального состава сигнала с определением частоты максимальной гармоники в каждый из последовательных моментов времени,
сравнивают между собой частоту гармоники в каждый предыдущий и текущий моменты времени,
принимают решение, что объект увеличил (уменьшил) скорость движения, если частота гармоники увеличилась (уменьшилась),
принимают решение, что объект сохранил скорость, если частота гармоники не изменилась.
Техническим результатом изобретения является автоматическое определение момента изменения объектом скорости движения и определение характера этого изменения.
Покажем возможность достижения указанного технического результата предложенным способом.
Известно [5, 6], что одним из основных источников первичного гидроакустического поля морских судов являются гребные винты, которые создают вибрации на двух дискретных частотах: на частоте, соответствующей скорости вращения вала (вальная частота) и на частоте, равной произведению частоты вращения вала и количества лопастей винта (лопастная частота). У современных судов вальные частоты лежат в интервале 2…6 Гц, а лопастные - 6…24 Гц [7]. Вследствие этого, и в силу нелинейных эффектов, происходящих при излучении, в наблюдаемом гидроакустическими средствами низкочастотном спектре шума судов среди гармоник с близкими амплитудами, которые составляют сплошную часть спектра, образуется совокупность гармоник большей амплитуды с кратными частотами. Гармоники, амплитуда которых превышает сплошную часть спектра, обычно называют дискретными составляющими. Совокупность дискретных составляющих с кратными частотами, обусловленными вибрациями гребного винта, образует вально-лопастной звукоряд.
Основная (первая по оси частот и максимальная по амплитуде гармоники) частота вального звукоряда равна частоте (скорости) вращения вала, которая, в свою очередь, задает скорость движения судна [7, 8]. Остальные частоты вального и лопастного звукорядов кратны по частоте и также пропорциональны скорости движения судна. Для дальних малошумных объектов максимальной по амплитуде гармоники является не основная частота вального звукоряда, а основная частота лопастного звукоряда, которая также пропорциональна частоте вращения вала и, следовательно, скорости движения судна.
Следовательно, анализ изменения частоты вращения вала, возможный на основании анализа изменения во времени частоты максимальной гармоники вально-лопастного звукоряда, позволит контролировать изменение скорости движения судна. Увеличение частоты гармоники свидетельствует об увеличении скорости движения судна, и наоборот, уменьшение частоты гармоники свидетельствует об уменьшении скорости движения судна.
При этом, в способе отсутствует необходимость обнаруживать все дискретные составляющие, входящие в вально-лопастной звукоряд, что может вызывать сложности, указанные в [9]. Необходимо обнаружить и анализировать частоту только для одной гармоники с максимальной амплитудой.
Анализ спектра сигнала для выделения максимальной гармоники необходимо осуществлять в низкочастотном диапазоне шумоизлучения, в котором проявляются вальные и лопастные частоты [7]. Это, в свою очередь, увеличивает потенциальные возможности способа относительно способа-прототипа, в котором обработку сигнала осуществляют в высокочастотном диапазоне шумоизлучения. Это обусловлено тем, что при распространении шумового сигнала в среде его высокие частоты затухают быстрее, чем низкие [5, 6], поэтому обработка сигнала в низкочастотном диапазоне шумоизлучения увеличивает потенциальные возможности способа.
Таким образом, анализ изменения во времени частоты максимальной гармоники спектра сигнала в низкочастотном диапазоне шумоизлучения позволит контролировать изменение скорости движения судна с автоматическим определением момента изменения скорости движения и определением характера этого изменения.
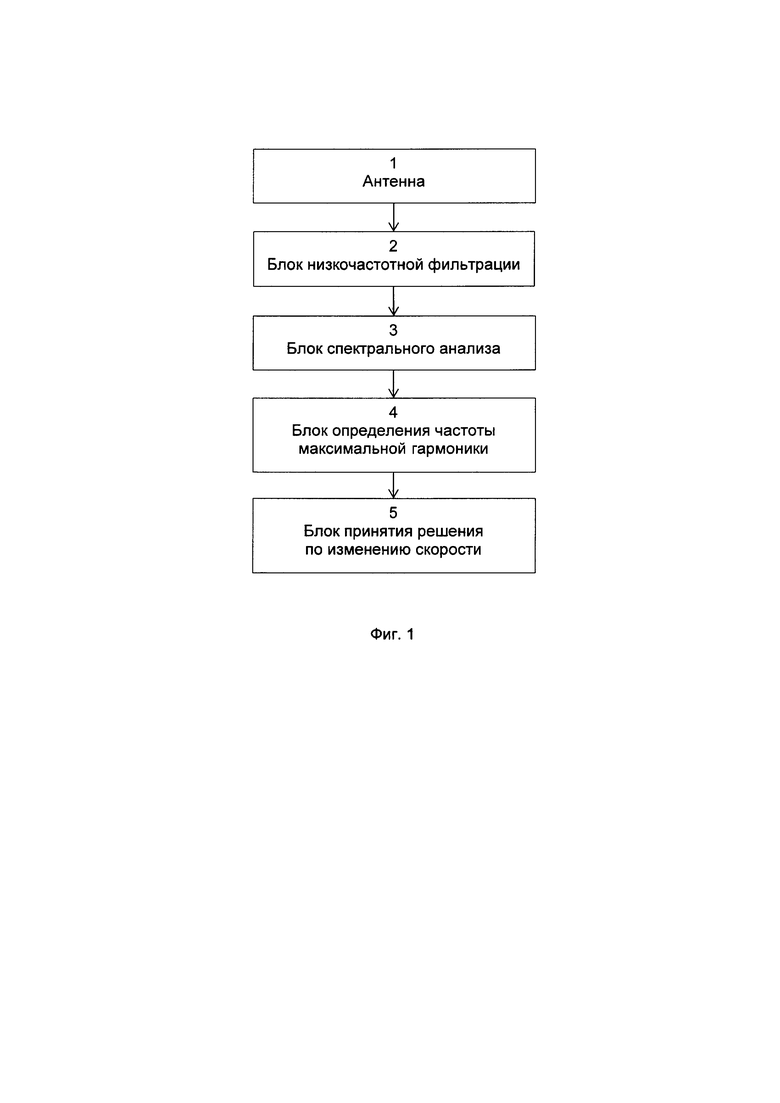
Сущность изобретения поясняется фиг. 1, на которой приведена блок-схема устройства, реализующего предлагаемый способ.
Устройство (фиг. 1) содержит последовательно соединенные блоки: антенну 1, блок 2 низкочастотной фильтрации, блок 3 спектрального анализа, блок 4 определения частоты максимальной гармоники, блок 5 принятия решения по изменению скорости.
Антенна 1 является известным устройством, используемым в прототипе. Низкочастотная фильтрация, реализуемая в блоке 2, является известной процедурой [10]. Блок 3 спектрального анализа содержит алгоритмы определения спектра сигнала, которые могут быть реализованы на основе быстрого преобразования Фурье [10]. Для определения частоты максимальной гармоники в блоке 4 могут быть использованы процедуры способа определения и анализа отдельных дискретных составляющих, присутствующих в спектре сигнала [11]. Процедуры, реализуемые в блоках 2-5, могут быть реализованы программным образом в цифровом вычислительном комплексе современных гидроакустических систем [12].
С помощью предлагаемого устройства заявленный способ реализуется следующим образом.
Сигнал объекта принимается антенной 1 и поступает в блок 2, где осуществляется его низкочастотная фильтрация. Для фильтрации выбирается диапазон частот, характерный для вально-лопастного звукоряда наблюдаемых объектов [7]. Далее низкочастотный сигнал поступает в блок 3, где с помощью процедуры быстрого преобразования Фурье осуществляется определение спектра сигнала. Далее спектр сигнала поступает в блок 4, в котором реализуются процедуры, позволяющие определить максимальную гармонику спектра и ее частоту. Процедуры, реализуемые в блоках 1-4, осуществляются непрерывно в процессе наблюдения сигнала объекта. В результате, в блок 5 непрерывно поступают частоты максимальной гармоники низкочастотного спектра сигнала, фиксируемые в последовательные моменты времени. В блоке 5 сравнивают между собой два значения частот: частоту в предыдущий момент времени и частоту в текущий момент времени. Если частота увеличилась, то принимают решение, что объект увеличил скорость. Если частота уменьшилась, то принимают решение, что объект уменьшил скорость. Если частота не изменилась, то принимают решение, что объект сохранил скорость движения.
Следует отметить, что процедура сравнения между собой двух значений частот, полученных в последующие моменты времени, является очень простой, а ее результат - однозначным. Это связано с тем, что при цифровой обработке сигнала, реализуемой в современных гидроакустических системах, отдельные составляющие спектра сигнала всегда будут разнесены между собой на фиксированный интервал по частоте, называемый разрешением спектра сигнала. Тогда значения частот гармоник, фиксируемых в последовательные моменты времени, будут либо точно совпадать друг с другом, либо различаться на значение, кратное разрешению спектра сигнала. Следовательно, для процедуры сравнения не требуется выбор порога, что увеличивает робастность способа в целом.
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ определения маневра шумящего объекта, который может быть использован при решении задач обработки сигнала шумоизлучения объекта в гидроакустических системах для определения параметров движения обнаруженного объекта.
Источники информации
1. Справочник по исследованию операций. В.А. Абчук и др. М.: ВИМО. 1979
2. Справочник по гидроакустике. Л.: Судостроение. 1988
3. Бурдик B.C. Анализ гидроакустических систем. Л.: Судостроение. 1988
4. Консон А.Д., Тимошенков В.Г. Патент РФ №2634786 от 03.11.2017. Способ определения маневра шумящего объекта. МПК G01S 3/80
5. Урик Р.Дж. Основы гидроакустики / Пер. с англ. - Л.: Судостроение. 1978.
6. Евтютов А.П., Митько В.Б. Примеры инженерных расчетов в гидроакустике. -Л.: Судостроение. 1981
7. Кудрявцев А.А., Лугинец К.П., Машошин А.И. Об амплитудной модуляции подводного шумоизлучения гражданских судов // Акустический журнал - 2003. Том 49. №2. С. 224-228
8. Малый В.В., Сапрыкин В.А., Рохманийко А.Ю., Есипов B.C., Якунин К.В. Устройство обнаружения шумовых гидроакустических сигналов в виде звукоряда на основе вычисления интегрального вейвлет-спектра. Патент на изобретение РФ №2464588 от 20.10.2012 с приоритетом от 15.06.2011
9. Волкова А.А., Никулин М.Н. Способ оценки количества лопастей винта шумящего в море объекта. Патент на изобретение РФ №2581719 с приоритетом от 14.10.2013
10. Применение цифровой обработки сигналов / под. ред. Э. Оппенгейма. М.: Мир. 1980
11. Анализ информации оператором-гидроакустиком / В.В. Деев, Ю.М. Забродин, А.П. Пахомов и др. - Л.: Судостроение. 1989
12. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. СПб.: Наука. 2004
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения изменения скорости движения шумящего объекта | 2020 |
|
RU2757075C1 |
| Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот | 2019 |
|
RU2718144C1 |
| СПОСОБ ОЦЕНКИ КОЛИЧЕСТВА ЛОПАСТЕЙ ВИНТА ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2013 |
|
RU2581719C2 |
| Способ оценки количества лопастей винта шумящего в море объекта | 2019 |
|
RU2713989C1 |
| Способ панорамной классификации шумящих объектов | 2017 |
|
RU2684439C1 |
| Способ классификации шумоизлучения морского объекта | 2021 |
|
RU2776958C1 |
| Способ обработки сигнала шумоизлучения | 2022 |
|
RU2799118C1 |
| Способ обработки кратковременного нестационарного случайного процесса шумоизлучения | 2023 |
|
RU2808947C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2020 |
|
RU2754602C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАНЕВРА ШУМЯЩЕГО ОБЪЕКТА | 2016 |
|
RU2634786C1 |
Изобретение относится к области гидроакустики, может быть использовано при решении задач обработки сигнала шумоизлучения объекта в гидроакустических системах и предназначено для определения параметров движения обнаруженного объекта. Способ основан на приеме шумового сигнала объекта гидроакустической антенной и непрерывной обработке принятого сигнала с определением его спектрального состава в последовательные моменты времени. При реализации способа обработку принятого сигнала осуществляют в низкочастотном диапазоне шумоизлучения. Производят анализ спектрального состава сигнала с определением частоты максимальной гармоники в каждый из последовательных моментов времени и сравнивают между собой частоту гармоники в каждый предыдущий и текущий моменты времени. Принимают решение, что объект увеличил (уменьшил) скорость движения, если частота гармоники увеличилась (уменьшилась). Принимают решение, что объект сохранил скорость, если частота гармоники не изменилась. Техническим результатом изобретения является автоматическое определение момента изменения объектом скорости движения и определение характера этого изменения. 1 ил.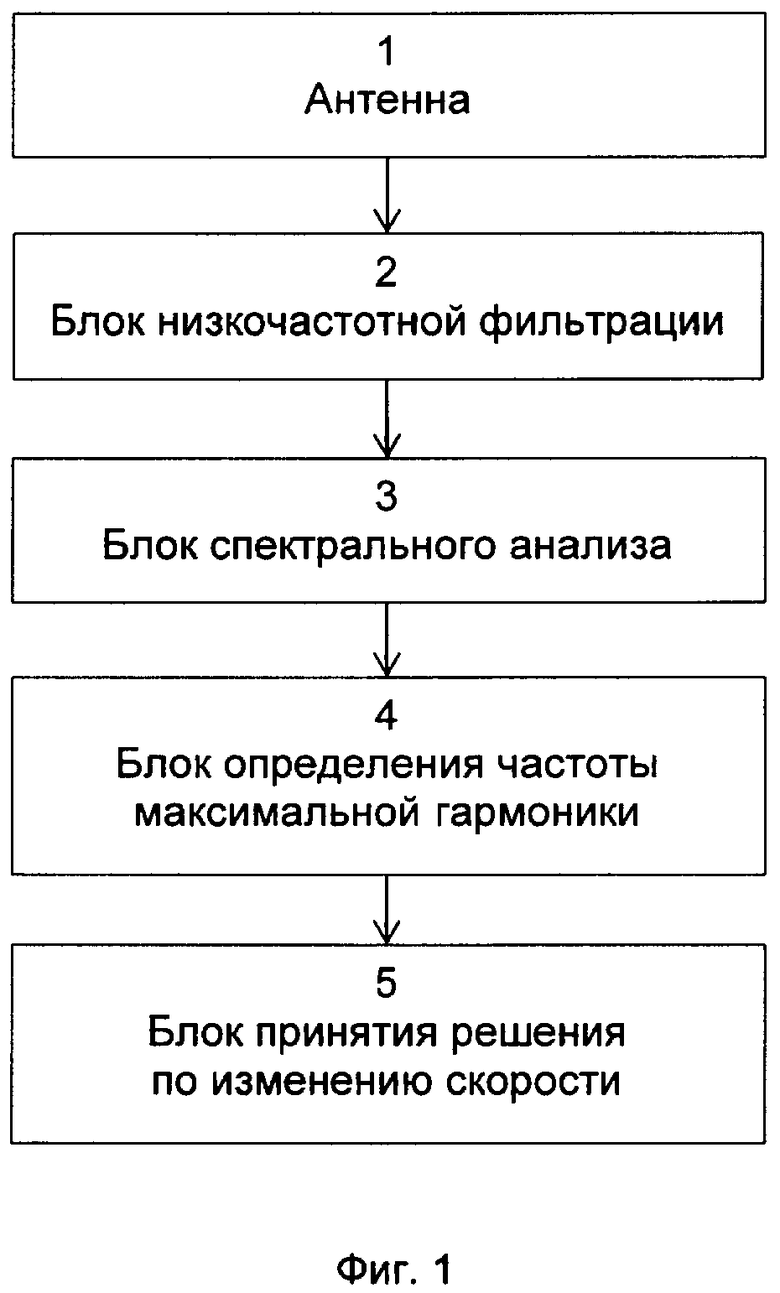
Способ определения маневра шумящего объекта, в котором принимают шумовой сигнал объекта гидроакустической антенной, осуществляют непрерывную обработку принятого сигнала с определением его спектрального состава в последовательные моменты времени и определяют момент маневра обнаруженного объекта, отличающийся тем, что обработку принятого сигнала осуществляют в низкочастотном диапазоне шумоизлучения, производят анализ спектрального состава сигнала с определением частоты максимальной гармоники в каждый из последовательных моментов времени, сравнивают между собой частоту гармоники в каждый предыдущий и текущий моменты времени, принимают решение, что объект увеличил (уменьшил) скорость движения, если частота гармоники увеличилась (уменьшилась), принимают решение, что объект сохранил скорость, если частота гармоники не изменилась.
| СПОСОБ ОПРЕДЕЛЕНИЯ МАНЕВРА ШУМЯЩЕГО ОБЪЕКТА | 2016 |
|
RU2634786C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ (ПЕЛЕНГА И ДИСТАНЦИИ) И ПАРАМЕТРОВ ДВИЖЕНИЯ (КУРСА И СКОРОСТИ) МОРСКОЙ ШУМЯЩЕЙ ЦЕЛИ | 2017 |
|
RU2649887C1 |
| СПОСОБ КЛАССИФИКАЦИИ ШУМЯЩИХ ОБЪЕКТОВ | 2003 |
|
RU2262121C2 |
| Г.Л | |||
| ПОЛЯК | |||
| ОПРЕДЕЛЕНИЕ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ПРИ МАНЕВРИРОВАНИИ ЦЕЛИ ИЛИ ПРЕСЛЕДОВАТЕЛЯ | |||
| ВЕСТНИК ВГУ | |||
| СЕРИЯ: ФИЗИКА | |||
| МАТЕМАТИКА | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| Прибор для определения всасывающей силы почвы | 1921 |
|
SU138A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ (ПЕЛЕНГА И ДИСТАНЦИИ) И ПАРАМЕТРОВ ДВИЖЕНИЯ (КУРСА И СКОРОСТИ) МОРСКОЙ ШУМЯЩЕЙ ЦЕЛИ | 2017 |
|
RU2649887C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ДО ШУМЯЩЕГО ОБЪЕКТА | 2014 |
|
RU2550576C1 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2015 |
|
RU2602732C1 |
| СПОСОБ ОЦЕНКИ КОЛИЧЕСТВА ЛОПАСТЕЙ ВИНТА ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2013 |
|
RU2581719C2 |

