Изобретение относится к области гидроакустики, может быть использовано при решении задач обработки сигнала шумоизлучения объекта в гидроакустических системах и предназначено для определения параметров движения обнаруженного объекта.
Известны способы, позволяющие определять изменение скорости движения шумящего объекта при визуальном слежении за ним оператором [Справочник по гидроакустике. Л.: Судостроение. 1988, Бурдик В.С. Анализ гидроакустических систем. Л.: Судостроение. 1988]. Указанные способы основаны на анализе уровня сигнала, принятого от объекта, и отображаемого на индикаторе в динамике наблюдения. При стабильном характере уровня сигнала считают, что маневр отсутствует. При резком изменении значения уровня сигнала принимают решение о наличии маневра объекта. Недостатком этих способов является необходимость постоянного визуального наблюдения за уровнем сигнала объекта, что становится практически невозможным при большом количестве одновременно наблюдаемых объектов. Известен способ, позволяющий определять изменение скорости движения шумящего объекта без участия оператора [Консон А.Д., Тимошенков В.Г. Патент РФ №2634786 от 03.11.2017. Способ определения маневра шумящего объекта. МПК G01S 3/80]. Способ основан на совместном анализе уровня сигнала и коэффициентов корреляции между спектрами сигнала в последовательные моменты времени. Однако, указанный способ очень чувствителен к выбору интервала времени накопления сигнала, поскольку основан на анализе изменения стационарности сигнала от объекта. Некорректный выбор интервала времени накопления для конкретного объекта может приводить к неверной работе способа.
Наиболее близким аналогом по решаемым задачам и выполняемым процедурам к предлагаемому изобретению является способ [Волкова А.А., Никулин М.Н. Патент РФ №2719626 от 21.04.2020. Способ определения маневра шумящего объекта. МПК G01S 3/80], который принят за прототип.
В способе-прототипе выполняются следующие операции:
принимают шумовой сигнал объекта гидроакустической антенной,
осуществляют непрерывную обработку принятого сигнала в низкочастотном диапазоне шумоизлучения с определением его спектрального состава в последовательные моменты времени,
производят анализ спектрального состава сигнала с определением частоты максимальной гармоники в каждый из последовательных моментов времени,
сравнивают между собой частоту гармоники в каждый предыдущий и текущий моменты времени,
принимают решение, что объект увеличил (уменьшил) скорость движения, если частота гармоники увеличилась (уменьшилась),
принимают решение, что объект сохранил скорость, если частота гармоники не изменилась.
Способ основан на анализе частоты одной из гармоник вально-лопастного звукоряда, для которого известно, [Кудрявцев А.А., Лугинец К.П., Машошин А.И. Об амплитудной модуляции подводного шумоизлучения гражданских судов // Акустический журнал - 2003. Том 49. №2. С. 224-228] что все гармоники ряда пропорциональны частоте вращения вала гребного винта, то есть пропорциональны скорости движения объекта. Изменение частоты любой из гармоник вально-лопастного ряда свидетельствует об изменении скорости движения объекта вследствие изменения частоты вращения вала гребного винта. При реализации способа анализируют мгновенное изменение частоты максимальной гармоники, то есть изменение частоты, произошедшее между двумя последовательными моментами времени. Однако, при работе способа возможны флюктуации измеренной частоты максимальной гармоники, вызванные не изменением частоты вращения вала, а некорректным измерением этой частоты. Это, в свою очередь, может приводить к ложному решению о наличии изменения скорости движения объекта.
Задачей заявляемого способа является повышение достоверности при автоматическом определении момента времени, в который шумящий объект изменил скорость движения.
Для решения поставленной задачи, в способ определения изменения скорости движения шумящего объекта, в котором принимают шумовой сигнал объекта гидроакустической антенной, осуществляют непрерывную обработку принятого сигнала в низкочастотном диапазоне шумоизлучения, определяют спектральный состав сигнала в последовательные моменты времени, производят анализ спектрального состава сигнала с определением частоты максимальной гармоники в каждый из последовательных моментов времени, и определяют момент изменения скорости движения для шумящего объекта, введены новые признаки, а именно:
измеряют значение скорости изменения частоты максимальной гармоники V, для чего
в оперативной памяти создают пустой массив фиксированной длины и непрерывно заполняют его значениями частоты максимальной гармоники, используя для этого скользящее окно,
а когда массив заполнен полностью, используя его элементы, определяют скорость изменения частоты как  где ƒi - значения частот из массива измерений, n - количество элементов в массиве измерений, ti - фиксированные значения времен наблюдения: t0=0, …, ti=ti-1+Δt, Δt - интервал между моментами измерения частоты.
где ƒi - значения частот из массива измерений, n - количество элементов в массиве измерений, ti - фиксированные значения времен наблюдения: t0=0, …, ti=ti-1+Δt, Δt - интервал между моментами измерения частоты.
принимают решение, что объект увеличил (уменьшил) скорость движения, если V>0 (V<0),
принимают решение, что объект сохранил скорость, если V=0,
непрерывно отображают принятое решение и значение V на индикаторе для анализа оператором изменения скорости объекта.
Техническим результатом изобретения является уменьшение количества ложных решений о наличии изменения скорости движения объекта и определение численной характеристики этого изменения.
Покажем возможность достижения указанного технического результата предложенным способом.
В предлагаемом способе вводится и измеряется новая величина - скорость изменения частоты V, которая является объективной характеристикой закона изменения частоты во времени и позволяет не только определить факт изменения объектом скорости движения, но и на качественном уровне оценить скорость изменения скорости объекта, то есть его ускорение.
Для измерения скорости V создается массив измерений, в котором сохраняется совокупность нескольких последних значений частот максимальной гармоники. Это позволяет построить аналитическую зависимость частоты ƒ от времени t, интерполировав совокупность значений частот в массиве измерений прямой линией ƒ=ƒ0+Vt, где ƒ0 - коэффициент, характеризующий начальную частоту, V - искомый коэффициент, определяющий скорость изменения частоты. Для получения минимально возможного значения ошибки коэффициента V, который и является измеряемой скоростью изменения частоты, используем метод наименьших квадратов [Зайдель А.Н. Ошибки измерений физических величин. СПб.: Лань. 2005]. Тогда, определяем скорость изменения частоты как  где ƒi - значения частот из массива измерений, n - количество элементов в массиве измерений, ƒi - фиксированные значения времен наблюдения: t0=0, …, ti=ti-1+Δt, Δt - интервал между моментами измерения частоты, что и предусматривает предлагаемый способ. В этом случае, если при работе способа произойдут отдельные флюктуации измеренной частоты максимальной гармоники (аномальные выбросы), вызванные не изменением частоты вращения вала, а некорректным измерением этой частоты, они будут нивелированы совокупным использованием значений частот из массива измерений, что предусматривает метод наименьших квадратов. Это, в свою очередь, позволит уменьшить количество ложных решений о наличии изменения скорости движения объекта. Другими словами, одновременное использование всей совокупности значений частот из массива измерений для получения одного значения V позволяет минимизировать влияние отдельных выбросов частоты, вызванных сбоями в измерении.
где ƒi - значения частот из массива измерений, n - количество элементов в массиве измерений, ƒi - фиксированные значения времен наблюдения: t0=0, …, ti=ti-1+Δt, Δt - интервал между моментами измерения частоты, что и предусматривает предлагаемый способ. В этом случае, если при работе способа произойдут отдельные флюктуации измеренной частоты максимальной гармоники (аномальные выбросы), вызванные не изменением частоты вращения вала, а некорректным измерением этой частоты, они будут нивелированы совокупным использованием значений частот из массива измерений, что предусматривает метод наименьших квадратов. Это, в свою очередь, позволит уменьшить количество ложных решений о наличии изменения скорости движения объекта. Другими словами, одновременное использование всей совокупности значений частот из массива измерений для получения одного значения V позволяет минимизировать влияние отдельных выбросов частоты, вызванных сбоями в измерении.
Таким образом, измерение скорости изменения частоты V, реализуемое в предлагаемом способе с минимально возможной ошибкой, позволяет уменьшить количество ложных решений о наличии изменения скорости движения объекта и определить численную характеристику этого изменения.
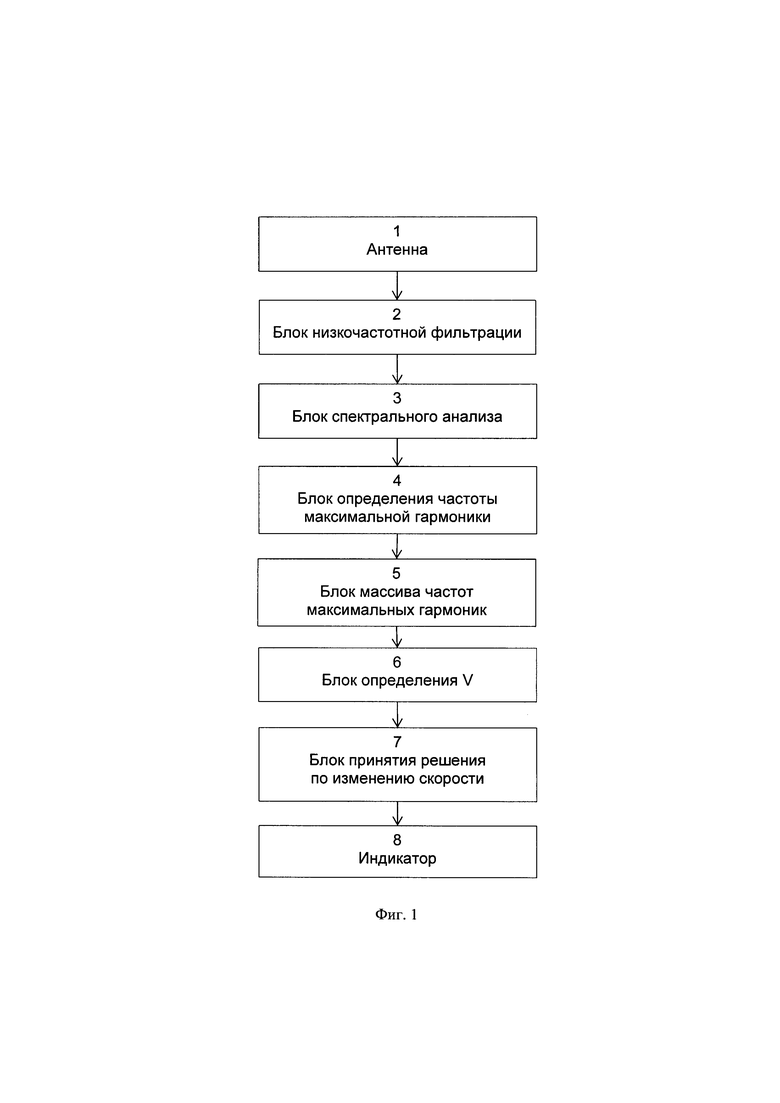
Сущность изобретения поясняется фиг. 1, на которой приведена блок-схема устройства, реализующего предлагаемый способ.
Устройство (фиг. 1) содержит последовательно соединенные блоки: антенну 1, блок 2 низкочастотной фильтрации, блок 3 спектрального анализа, блок 4 определения частоты максимальной гармоники, блок 5 блок формирования массива частот максимальных гармоник, блок 6 определения V, блок 7 принятия решения по изменению скорости, индикатор 8.
Антенна 1, а также блоки 2-4 обработки сигнала заимствуются из прототипа. Процедуры, реализуемые в блоках 5-7, могут быть реализованы программным образом в цифровом вычислительном комплексе современных гидроакустических систем [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. СПб.: Наука. 2004]. При этом, оценка скорости изменения частоты V осуществляется по методу наименьших квадратов [Зайдель А.Н. Ошибки измерений физических величин. СПб.: Лань. 2005] согласно формуле изобретения. Индикатор 8 также входит в состав современных гидроакустических систем.
С помощью предлагаемого устройства заявленный способ реализуется следующим образом.
Сигнал объекта принимается антенной 1 и поступает в блок 2, где осуществляется его низкочастотная фильтрация. Для фильтрации выбирается диапазон частот, характерный для вально-лопастного звукоряда наблюдаемых объектов [Кудрявцев А.А., Лугинец К.П., Машошин А.И. Об амплитудной модуляции подводного шумоизлучения гражданских судов // Акустический журнал - 2003. Том 49. №2. С. 224-228]. Далее низкочастотный сигнал поступает в блок 3, где с помощью процедуры быстрого преобразования Фурье осуществляется определение спектра сигнала. Далее спектр сигнала поступает в блок 4, в котором реализуются процедуры, позволяющие определить максимальную гармонику спектра и ее частоту. Процедуры, реализуемые в блоках 1-4, осуществляются непрерывно в процессе наблюдения сигнала объекта. В результате, в блок 5 непрерывно поступают частоты максимальной гармоники низкочастотного спектра сигнала, фиксируемые в последовательные моменты времени. В блоке 5 осуществляется непрерывное заполнение (дополнение) массива измерений поступающими значениями частот. При этом, при заполнении массива используется скользящее окно: наиболее старая информация стирается, весь массив сдвигается вниз, и текущая информация записывается как наиболее актуальная. Значения частот ƒi, записанные в массив измерений, поступают в блок 6. Когда массив измерений заполняется полностью, в блоке 6 начинают формироваться текущие значения V по методу наименьших квадратов согласно формуле:
где ƒi - значения частот из массива измерений, n - количество элементов в массиве измерений, - фиксированные значения времен наблюдения: t0=0, … tt=ti-1+Δt, Δt - интервал между моментами измерения частоты. Одновременное использование всей совокупности значений частот из массива измерений позволяет минимизировать влияние отдельных аномальных выбросов частоты. В блоке 7 осуществляется анализ значения V. Если V=0, принимают решение, что объект движется без изменения скорости. Если V>0 (V<0), принимают решение, что объект увеличил (уменьшил) скорость. Полученное решение и значение V поступают на индикатор 8. По абсолютному значению V оператор может принять качественное решение, насколько резко объект изменил скорость. Процедуры, реализуемые в блоках 5-8, также осуществляются непрерывно в процессе наблюдения сигнала объекта. В результате, начиная с момента полного заполнения массива измерений, на индикатор, для анализа оператором, непрерывно поступают автоматическое решение об изменении/сохранении скорости движения для шумящего объекта и значение численной характеристики этого изменения.
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ определения изменения скорости движения шумящего объекта, который может быть использован при решении задач обработки сигнала шумоизлучения объекта в гидроакустических системах для определения параметров движения обнаруженного объекта.
Использование: изобретение относится к области гидроакустики, может быть использовано при решении задач обработки сигнала шумоизлучения объекта в гидроакустических системах и предназначено для определения параметров движения обнаруженного объекта. Сущность: способ основан на непрерывном приеме и обработке в низкочастотном диапазоне шумового сигнала объекта гидроакустической антенной с определением частоты максимальной гармоники в его спектральном составе в последовательные моменты времени. При реализации способа создают массив измерений фиксированной длины и дополняют его значениями частот максимальной гармоники в каждый из последовательных моментов времени, используя для этого скользящее окно. Когда массив заполнен полностью, формируют из его элементов значение скорости изменения частоты V, используя метод наименьших квадратов. Принимают решение, что объект увеличил (уменьшил) скорость движения, если V>0 (V<0), принимают решение, что объект сохранил скорость, если V=0. Технический результат: уменьшение количества ложных решений о наличии изменения скорости движения объекта и определение численной характеристики этого изменения. 1 ил.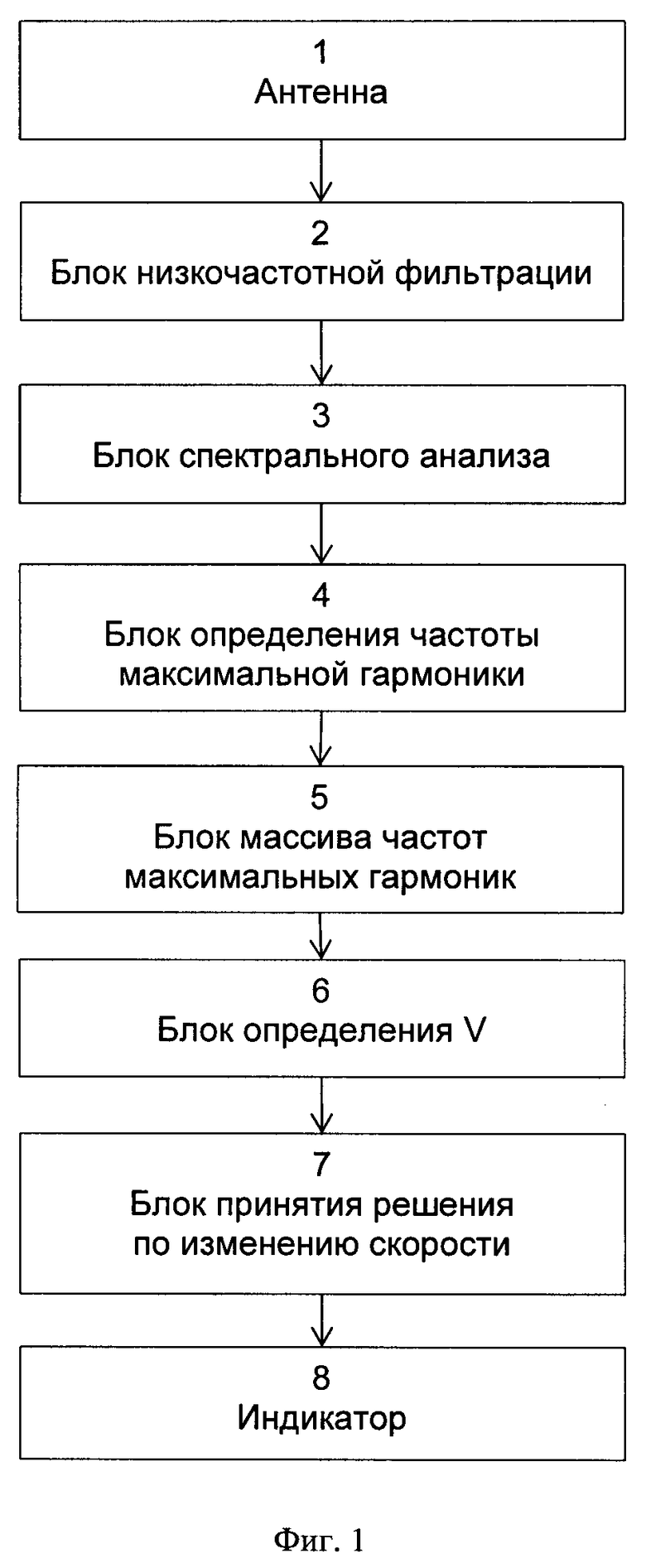
Способ определения изменения скорости движения шумящего объекта, в котором принимают шумовой сигнал объекта гидроакустической антенной, осуществляют непрерывную обработку принятого сигнала в низкочастотном диапазоне шумоизлучения, определяют спектральный состав сигнала в последовательные моменты времени, производят анализ спектрального состава сигнала с определением частоты максимальной гармоники в каждый из последовательных моментов времени и определяют момент изменения скорости движения для шумящего объекта, отличающийся тем, что измеряют значение скорости изменения частоты максимальной гармоники V, для чего в оперативной памяти создают пустой массив фиксированной длины и непрерывно заполняют его значениями частоты максимальной гармоники, используя для этого скользящее окно, а когда массив заполнен полностью, используя его элементы, определяют скорость изменения частоты как 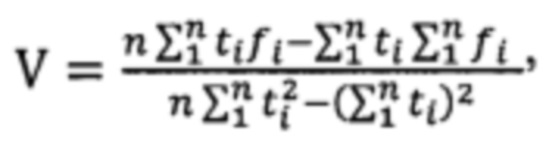 где ƒi - значения частот из массива измерений, n - количество элементов в массиве измерений, ti - фиксированные значения времен наблюдения: t0=0, …, ti=ti-1+Δt, Δt - интервал между моментами измерения частоты, принимают решение, что объект увеличил (уменьшил) скорость движения, если V>0 (V<0), принимают решение, что объект сохранил скорость, если V=0, непрерывно отображают принятое решение и значение V на индикаторе для анализа оператором изменения скорости объекта.
где ƒi - значения частот из массива измерений, n - количество элементов в массиве измерений, ti - фиксированные значения времен наблюдения: t0=0, …, ti=ti-1+Δt, Δt - интервал между моментами измерения частоты, принимают решение, что объект увеличил (уменьшил) скорость движения, если V>0 (V<0), принимают решение, что объект сохранил скорость, если V=0, непрерывно отображают принятое решение и значение V на индикаторе для анализа оператором изменения скорости объекта.
| Способ определения маневра шумящего объекта | 2019 |
|
RU2719626C1 |
| Способ оценки количества лопастей винта шумящего в море объекта | 2019 |
|
RU2713989C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морских объектов | 2018 |
|
RU2711406C1 |
| Способ определения параметров движения шумящего объекта | 2017 |
|
RU2692837C2 |
| Гидроакустический способ определения параметров цели при использовании взрывного сигнала с беспроводной системой связи | 2018 |
|
RU2692841C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2013 |
|
RU2546851C1 |
| US 5886661 A1, 23.03.1999. | |||

