ОБЛАСТЬ ТЕХНИКИ
[0001] Данное изобретение относится к устройству управления автомобилем, включающему устройство предотвращения столкновений.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] В известном уровне техники описано устройство для управления автомобилем, включающее устройство предотвращения столкновений, которое выполняет функцию управления предотвращением столкновений. Такое устройство для управления автомобилем известно, например, из документа 1 (Опубликованная заявка на патент Японии №2010-015450 (JP 2010-015450 А)), в котором описано такое управление устройством предотвращения столкновений, которое блокирует выполнение функции предотвращения столкновения при повороте автомобиля, что не позволяет ошибочно распознавать объект на обочине изгиба дороги, например защитное ограждение, как препятствие для движения.
Список литературы
Патентная литература
[0003] Документ 1: Опубликованная заявка на патент Японии №2010-015450 (JP 2010-015450 А).
Документ 2: Опубликованная заявка на патент Японии №2000-298800 (JP 2000-298800 А).
Документ 3: Опубликованная заявка на патент Японии №2000-198402 (JP 2000-198402 А).
Документ 4: Опубликованная заявка на патент Японии №2008-018832 (JP 2008-018832 А).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая проблема
[0004] При торможении автомобиль наклоняется в продольной плоскости, и возникает угловая скорость рыскания; такое поведение может быть определено как поворот. При этом, учитывая блокирование работы функции предотвращения столкновения в момент поворота, как описано выше, работа устройства предотвращения столкновения может блокироваться без необходимости, например, когда автомобиль замедляется, двигаясь по прямой. Таким образом, известные из уровня техники устройства для управления автомобилем могут быть усовершенствованы в точности определения того, необходимо ли блокировать работу устройства предотвращения столкновений.
[0005] Таким образом, задачей настоящего изобретения является создание устройства для управления автомобилем с повышенной точностью определения необходимости блокирования работы устройства предотвращения столкновений.
Решение проблемы
[0006] Для решения вышеуказанной задачи в соответствии с настоящим изобретением предлагается устройство для управления автомобилем, содержащее: блок предотвращения столкновения, выполняющего управление предотвращением столкновения автомобиля с объектами вокруг автомобиля, при этом функция блока предотвращения столкновения блокируется, если определяется выполнение поворота автомобиля; и блок управления, который управляет работой блока предотвращения столкновения, что исключает блокирование работы блока предотвращения столкновения при замедлении движения автомобиля.
[0007] В устройстве для управления автомобилем согласно настоящему изобретению блок управления осуществляет управление блоком предотвращения столкновения, исключая блокирование работы блока предотвращения столкновений при замедлении движения автомобиля. Соответственно, даже в случае наклона на передние колеса автомобиля при торможении, при котором возникающая скорость рыскания определяется как выполнение поворота, несложно выполнить управление предотвращением столкновения. В результате, поскольку можно избежать ситуации ненужной блокировки управления предотвращением столкновения, существует возможность повысить точность определения необходимости отключения работы устройства управления предотвращением столкновений.
[0008] В устройстве для управления автомобилем согласно настоящему изобретению предпочтительно, чтобы блок управления блоком предотвращения столкновений функционировал таким образом, чтобы не блокировать работу блока предотвращения столкновений, если величина замедления скорости автомобиля больше или равна пороговому значению. В соответствии с данным изобретением, когда скорость замедления автомобиля больше или равна пороговому значению, несложно инициировать работу блока предотвращения столкновений, что означает возможность избежать нежелательного блокирования функции при торможении.
[0009] В устройстве для управления автомобилем в соответствии с настоящим изобретением предпочтительно, чтобы блок управления блоком предотвращения столкновений не отключал работу блока предотвращения столкновений при задействовании тормоза автомобиля. В соответствии с настоящим изобретением, в случае срабатывания тормоза не возникает затруднений при выполнении управления предотвращением столкновений, что позволяет избежать ненужного блокирования функции благодаря применению простой конфигурации.
[0010] Устройство для управления автомобилем согласно настоящему изобретению также может дополнительно включать в себя блок торможения, автоматически снижающий скорость автомобиля, при этом предпочтительно, чтобы блок управления осуществлял управление блоком предотвращения столкновений таким образом, чтобы не блокировать выполнение работы блока предотвращения столкновений при замедлении движения автомобиля под воздействием блока торможения. В соответствии с данным изобретением, даже в случае установки в автомобиле системы безопасности, такой как система предаварийной безопасности (PCS), которая осуществляет управление для предотвращения столкновения, не возникает затруднений с выполнением управления предотвращением столкновений при торможении, благодаря чему можно избежать ненужного блокирования функции во время торможения, что дополнительно повышает точность определения того, необходимо ли блокировать срабатывание устройства предотвращения столкновений.
Полезный эффект изобретения
[0011] В соответствии с настоящим изобретением можно повысить точность определения необходимости блокировать срабатывание блока предотвращения столкновений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0012] ФИГ. 1 - блок-схема, на которой показано устройство для управления автомобилем в соответствии с вариантом осуществления изобретения.
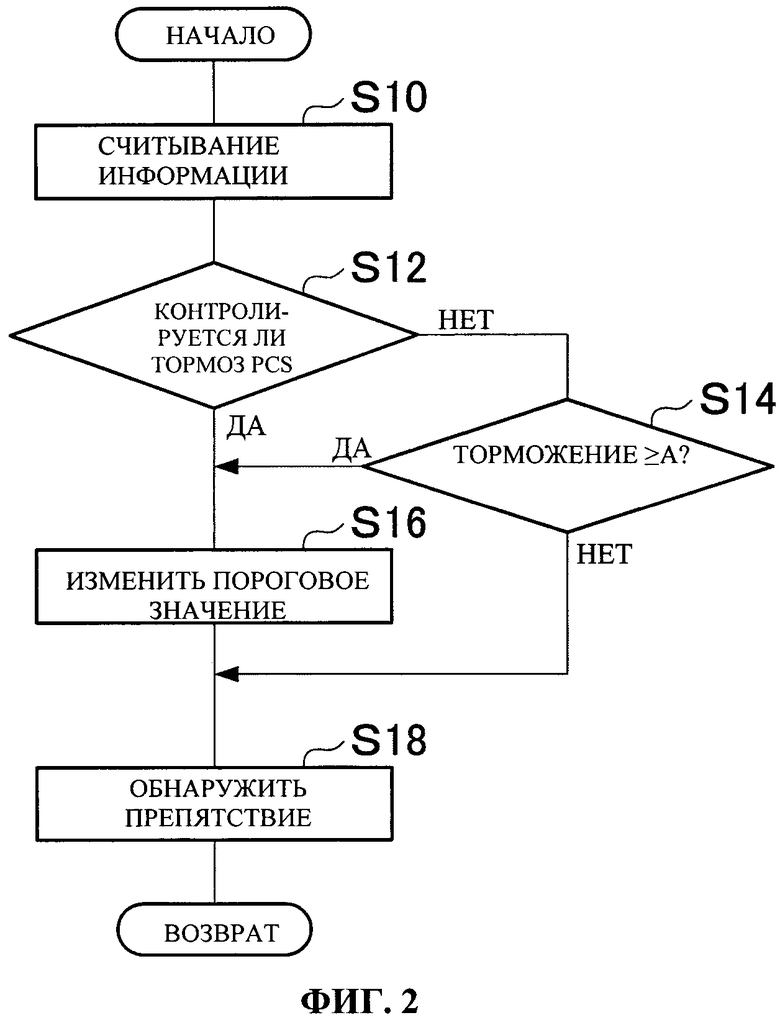
ФИГ. 2 - блок-схема, на которой показан процесс определения препятствия, выполняемый устройством для управления автомобилем, показанным на ФИГ. 1.
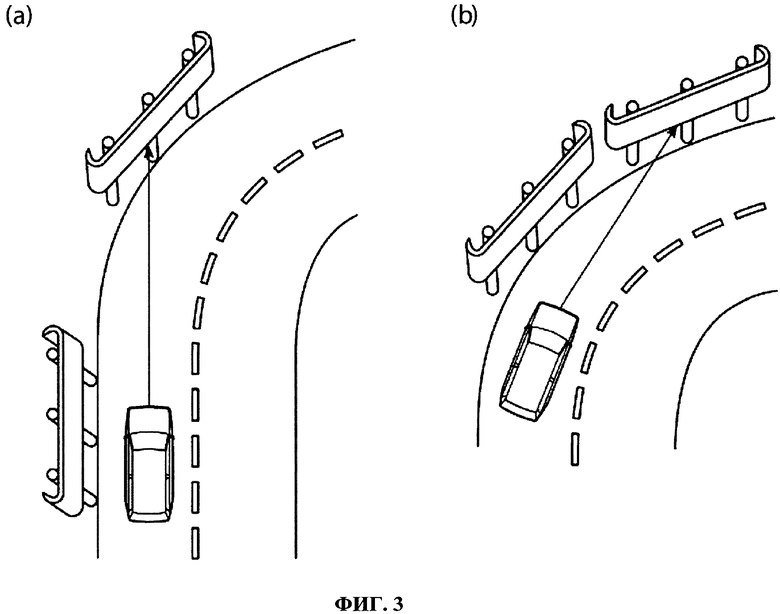
ФИГ. 3 - это схема, иллюстрирующая ситуацию, в которой срабатывание блока предотвращения столкновения блокируется.
СПОСОБЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0013] Далее вариант осуществления настоящего изобретения будет описан со ссылкой на прилагаемые чертежи. В изложенном ниже описании ссылки на идентичные элементы будут приводиться с использованием одинаковых номеров позиций, и их описание не будет повторяться.
[0014] Как показано на ФИГ. 1, устройство для управления автомобилем 1 согласно данному варианту исполнения поддерживает функцию PCS, установленную на автомобиле 100, для распознавания информации об окружении автомобиля 100 и характере движения автомобиля 100, а также для управления предотвращением столкновения с объектами вокруг автомобиля 100. Устройство для управления автомобилем 1 включает блок предотвращения столкновения 82, выполняющий управление предотвращением столкновения автомобиля 100 с объектом в окружении автомобиля 100, и блокирует функцию блока предотвращения столкновения 82 при определении режима поворота автомобиля 100. Устройство для управления автомобилем 1 включает блок 84 управления, который осуществляет управление блоком 82 предотвращения столкновения с тем, чтобы не блокировать функцию блока 82 предотвращения столкновений в случае торможения автомобиля 100. Блок 82 предотвращения столкновений и блок 84 управления установлены, например, в электронном блоке управления (ЭБУ) 8. Устройство для управления автомобилем, например, может включать в себя датчик 2 миллиметрового диапазона волн, датчик 3 автомобиля и блок ЭБУ 8.
[0015] Датчик 2 миллиметрового диапазона волн выступает в качестве радара, принимающего отраженные отправленные им РЧ-волны и получающего таким образом точку определения объекта в окружении автомобиля 100. Датчик 2 миллиметровых волн устанавливается, например, на передней части и боковых сторонах автомобиля 100, сканирует область впереди и с боковых сторон автомобиля 100 РЧ-волнами миллиметрового диапазона и принимает РЧ-волны, отраженные от объектов, присутствующих в окружении автомобиля 100. Соответственно, датчик 2 миллиметровых волн распознает объект как точку отражения РЧ-волн. Датчик 2 миллиметровых волн получает информацию об объекте (информацию радара об объекте) с помощью передачи и получения волн миллиметрового диапазона. Информация радара об объекте включает, например, положение объекта в поперечном направлении, расстояние между автомобилем 100 и объектом, а также относительную скорость между автомобилем 100 и объектом. Датчик миллиметровых волн 2 подключен к блоку ЭБУ 8, и информация радара об объекте, полученная датчиком миллиметровых волн 2, вводится в блок ЭБУ 8.
[0016] Датчик 3 автомобиля используется в качестве устройства определения состояния движения автомобиля 100. Датчик 3 автомобиля включает, например, датчик 31 тормоза, датчик 32 скорости, датчик 33 ускорения, и датчик 34 скорости рыскания. Датчик 3 автомобиля подключен к блоку ЭБУ 8, и информация о характере движения автомобиля 100, полученная датчиком 3 автомобиля, вводится в блок ЭБУ 8.
[0017] Датчик 31 тормоза имеет функцию определения, нажата ли водителем педаль тормоза на автомобиле. Датчик 31 тормоза определяет состояние нажатия педали тормоза водителем и передает определенное состояние нажатия педали тормоза в блок ЭБУ 8 как сигнал торможения.
[0018] Датчик 32 скорости имеет функцию определения скорости автомобиля 100 и устанавливается, например, на колесах автомобиля 100. Датчик 32 скорости определяет, например, скорость вращения колес автомобиля и рассчитывает скорость автомобиля 100 на основании определенной скорости вращения. Датчик 32 скорости передает полученную скорость автомобиля 100 в блок ЭБУ 8.
[0019] Датчик 33 ускорения имеет функцию выявления ускорения и замедления автомобиля 100. Датчик 33 ускорения устанавливается, например, в передней части автомобиля 100 и определяет ускорение и замедление в направлении автомобиля 100 в продольном направлении, а также ускорение и замедление в поперечном направлении. Датчик 33 ускорения передает полученное ускорение или замедление в блок ЭБУ 8.
[0020] Датчик 34 скорости рыскания предназначен для определения скорости рыскания автомобиля 100. Датчик 34 скорости рыскания передает определенную скорость рыскания в виде сигнала скорости рыскания в блок ЭБУ 8.
[0021] Блок ЭБУ 8 имеет функцию PCS определения, присутствует ли в окружении автомобиля 100 препятствие, на основе информации, полученной датчиком 2 миллиметровых волн и датчиком 3 автомобиля, а также выполняет управление предотвращением столкновения, если выявлено наличие препятствия. Блок ЭБУ 8 представляет собой вычислительное устройство, включающее центральный процессор (ЦПУ) и память в виде постоянного запоминающего устройства (ПЗУ) и оперативного запоминающего устройства (ОЗУ), и включает также схему входящих сигналов, схему исходящих сигналов и схему блока питания. Блок ЭБУ 8 включает в себя, например, загруженные приложения, сохраненные в ПЗУ и ОЗУ, и запуск загруженных приложений процессором (ЦПУ).
[0022] Далее будет приведено сравнение устройства для управления автомобилем, описанное в известном уровне техники с заявляемым устройством для управления автомобилем, согласно настоящему варианту осуществления. В предшествующем уровне техники при выполнении процесса по предотвращению столкновения, например, если автомобиль находится в начальной точке изгиба дороги и будет двигаться по кривой, как показано в части (а) на ФИГ. 3, либо когда автомобиль движется вдоль кривой, показанной в части (b) на ФИГ. 3, объект на обочине такой, как защитное ограждение, может быть ошибочно распознан как препятствие. Чтобы предотвратить ошибку распознавания, известное устройство для управления автомобилем блокирует работу блока предотвращения столкновений, чтобы исключить выполнение им управления предотвращением столкновения при повороте автомобиля.
[0023] При замедлении автомобиль может наклоняться вперед, что приводит к увеличению угловой скорости рыскания, и такое поведение может быть расценено как поворот. Соответственно, если функционирование блока предотвращения столкновений блокируется при повороте автомобиля, как описано выше, его функционирование будет блокироваться также из-за наклона автомобиля вперед при замедлении, даже в случае движения автомобиля по прямой, что затрудняет выполнение управления предотвращением столкновения. Таким образом, недостатком работы известного устройства для управления автомобилем является блокирование без необходимости функционирования устройства предотвращения столкновений.
[0024] Таким образом, в устройстве для управления автомобилем 1 согласно настоящему варианту осуществления изобретения, как показано на ФИГ. 1, блок ЭБУ 8 включает в себя блок 81 обнаружения препятствий, блок 82 предотвращения столкновений, блок 83 определения режима поворота, блок 84 управления и блок 85 торможения. Для устранения недостатков, заключающихся в блокировании без необходимости функционирования блока предотвращения столкновений, блок 84 управления осуществляет управление работой блока 82 предотвращения столкновений таким образом, чтобы не блокировать работу блока 82 предотвращения столкновений при замедлении движения автомобиля. Блок 81 обнаружения препятствий, блок 82 предотвращения столкновений, блок 83 определения режима поворота, блок 84 управления и блок 85 торможения могут не объединяться в одном блоке ЭБУ 8, как описано выше, а могут быть включены в разные блоки ЭБУ.
[0025] Блок 81 обнаружения препятствия обнаруживает объект вблизи автомобиля 100 на основе информации, полученной датчиком 2 миллиметровых волн, и определяет, имеется ли препятствием объект вблизи автомобиля 100, используя данные о характере движения, полученные от датчика 3 автомобиля. В частности, блок 81 обнаружения препятствий рассчитывает степень риска столкновения автомобиля 100 с объектом вблизи автомобиля 100 на основании информации, полученной от датчика 2 миллиметровых волн и датчика 3 автомобиля, и определяет, что имеется препятствие, если, например, риск столкновения равен или выше заданного порогового значения. Например, положение объекта в поперечном направлении по отношению к автомобилю 100 может использоваться в качестве информации, полученной датчиком 2 миллиметровых волн. В этом случае определяется, что имеется препятствие, если положение объекта в поперечном направлении, определенное датчиком 2 миллиметровых волн, меньше заданного порогового значения, или будет установлено, что препятствие отсутствует, если положение объекта в поперечном направлении больше или равно заданному пороговому значению.
[0026] Блок 82 предотвращения столкновений выполняет управление предотвращением столкновения автомобиля 100 с препятствием вблизи автомобиля 100. Блок 82 предотвращения столкновений выдает, например, предупреждение водителю автомобиля 100, если блок 81 обнаружения препятствий обнаружит, что в вблизи автомобиля 100 имеется препятствие. Примеры управления по предотвращению столкновений, выполняемых блоком 82 предотвращения столкновений, включают торможение автомобиля 100 блоком 85 торможения и натяжение ремня безопасности.
[0027] Функция блока 83 определения режима поворота заключается в определении в движении автомобиля 100 поворота. Блок 83 определения режима поворота определяет наличие движения на поворот на основе данных о характере движения автомобиля 100, полученных датчиком 3 автомобиля. В частности, например, когда автомобиль 100 поворачивает, и определенная датчиком 34 скорости рыскания угловая скорость рыскания больше или равна заданному пороговому значению, блок 83 определения режима поворота определяет поворот как движение на поворот.
[0028] Блок 84 управления служит для управления работой блока 82 предотвращения столкновений и контролирует блок 82 предотвращения столкновений таким образом, чтобы не блокировать работу блока 82 предотвращения столкновений при торможении автомобиля 100. В частности, блок 84 управления устанавливает пороговое значение определения для блока 81 обнаружения препятствий и изменяет пороговое значение определения в блоке 81 обнаружения препятствий таким образом, чтобы блокировать действие блока 82 предотвращения столкновений при выявлении поворота, а также упростить действие блока 82 предотвращения столкновений при замедлении автомобиля 100. Например, если в качестве порогового значения замедления используется расстояние до объекта в поперечном направлении, блок 84 управления управляет блоком 82 предотвращения столкновений таким образом, чтобы увеличить пороговое значение определения, блокируя определение наличия препятствия при выявлении движения на повороте, и увеличить пороговое значение определения для выявления наличия препятствия при замедлении автомобиля 100.
[0029] Блок 84 управления осуществляет управление блоком 82 предотвращения столкновений таким образом, чтобы не блокировать срабатывание блока 82 предотвращения столкновений при срабатывании тормоза на автомобиле 100. В данном случае тормоз автомобиля 100 может включаться в результате выявленного датчиком 31 тормоза действия водителя или может включаться автоматически в результате срабатывания функции торможения.
[0030] Функция блока 85 торможения заключается в автоматическом снижении скорости автомобиля 100. Блок 85 торможения выполняет функцию, подобную функции предотвращения столкновения PCS, и снижает скорость движения автомобиля 100, если блок 81 обнаружения препятствия выявил наличие препятствия.
[0031] Функционирование устройства для управления автомобилем 1, согласно данному варианту осуществления, будет далее описано со ссылкой на ФИГ. 2. Процесс, показанный на ФИГ. 2, выполняется блоком ЭБУ 8 и является процессом определения наличия препятствия вблизи автомобиля 100. Процесс обнаружения препятствий выполняется в цикле через заранее заданный период времени, например, во время движения автомобиля 100.
[0032] Сначала на этапе S10 (далее именуемом «S10». Аналогичное правило применяется для других этапов) выполняется процесс считывания различной информации. В частности, результаты обнаружения от датчика 2 миллиметровых волн и датчика 3 автомобиля передаются в блок ЭБУ 8 и сохраняются в памяти блока ЭБУ 8. После завершения процесса на этапе S10 выполняется процесс на этапе S12.
[0033] На этапе S12 выполняется процесс определения работы тормоза для выявления торможения. В частности определяется, было ли активировано автоматическое торможение блоком 85 торможения. Выполняется процесс на этапе S14, если было определено, что автоматическое торможение не применялось, или выполняется процесс на этапе S16, если было определено, что активировано автоматическое торможение. Вместо определения включения автоматического торможения блоком 85 торможения на этапе S12 может определяться, нажата ли педаль тормоза водителем автомобиля 100.
[0034] На этапе S14 выполняется процесс определения торможения для проверки того, превышает ли торможение автомобиля 100 пороговое значение или равно ему. В частности, блок ЭБУ 8 выявляет торможение автомобиля 100 на основе результатов считывания датчика 33 ускорения и определяет, больше ли или равно торможение автомобиля 100 пороговому значению А. При этом выполняется процесс на этапе S16, если было определено, что величина торможения больше или равна пороговому значению А, или выполняется процесс на этапе S18, если было определено, что торможение меньше порогового значения А. Пороговое значение А, как правило, не ограничено, но может быть установлено, например, как 0,3 [G]. Пороговое значение А можно должным образом рассчитать, например, на основе соотношения между торможением и углом рыскания автомобиля 100, с одной стороны, и вертикальным углом миллиметровых волн, с другой стороны.
[0035] На этапе S16 с помощью блока 84 управления выполняется процесс настройки порогового значения. В частности, пороговое значение устанавливается блоком 84 управления таким образом, чтобы упростить выполнение блоком 82 предотвращения столкновений управление предотвращением столкновения. Например, когда процесс определения препятствия осуществляется с учетом положения объекта в поперечном направлении, блок 84 управления задает пороговое значение на большую величину, и, например, пороговое значение изменяется с ±0,5 [м] на ±1,0 [м]. Такое изменение порогового значения упрощает обнаружение наличия препятствия и облегчает выполнение управления предотвращением столкновения блоком 82 предотвращения столкновений. После завершения процесса на этапе S16, процесс переходит на этап S18.
[0036] На этапе S18 блоком 81 обнаружения препятствий выполняется процесс обнаружения препятствия. В частности, блок 81 обнаружения препятствий определяет наличие препятствия, сравнивая результаты обнаружения, полученные от датчика 2 миллиметровых волн и датчика 3 автомобиля, с пороговым значением. Например, если будет обнаружено наличие препятствия в поперечном направлении, блок 81 обнаружения препятствий установит, что имеется препятствие, если расстояние в поперечном направлении от автомобиля 100 до препятствия меньше или равно пороговому значению, и определит, что препятствие отсутствует, если расстояние в поперечном направлении до препятствия больше порогового значения. При определении наличия препятствия блок 82 предотвращения столкновений выполняет управление предотвращением столкновений. Например, выполняется торможение автомобиля 100 блоком 85 торможения, подается предупреждающий сигнал водителю автомобиля 100 или срабатывает ремень безопасности. После завершения процесса на этапе S18 ход выполнения процессов прекращается.
[0037] Как описано выше, в данном варианте осуществления, устройство управления автомобилем 1 включает блок 82 предотвращения столкновений, выполняющий управление предотвращением столкновения автомобиля 100 с объектом вблизи автомобиля 100, при этом срабатывание блока 82 предотвращения столкновений блокируется при определении движения автомобиля 100 на повороте, и блок 84 управления, который управляет работой блока 82 предупреждения столкновений таким образом, чтобы не препятствовать срабатыванию блока 82 предотвращения столкновений при замедлении автомобиля 100.
[0038] Как описано выше, устройство для управления автомобилем 1, в соответствии с настоящим вариантом осуществления, управляет работой блока предотвращения столкновений таким образом, чтобы не затруднять ему выполнение управления предотвращением столкновения при замедлении автомобиля 100. Соответственно, при наклоне автомобиля вперед, если такое поведение будет распознано как торможение, не выполняется блокирование срабатывания блока 82 предупреждения столкновений. В результате, поскольку можно избежать ситуации ненужного блокирования срабатывания блока 82 предотвращения столкновения в момент торможения автомобиля 100 и в аналогичных условиях, можно повысить точность распознавания необходимости блокировки срабатывания блока 82 предотвращения столкновений.
[0039] В устройстве для управления автомобилем 1 в соответствии с настоящим вариантом осуществления блок 84 управления включает блок 84 управления, который осуществляет управление работой блока 82 предотвращения столкновений таким образом, чтобы не блокировать срабатывание блока 82 предотвращения столкновений, если замедление автомобиля 100 больше или равно пороговому значению А. Соответственно, если замедление автомобиля 100 больше или равно пороговому значению А, не выполняется блокирование срабатывания блока предотвращения столкновений 82, что позволяет избежать ненужной блокировки.
[0040] В устройстве для управления автомобилем 1 согласно данному варианту осуществления блок 84 управления осуществляет управление блоком 82 предотвращения столкновений таким образом, чтобы не блокировать срабатывание блока 82 предупреждения столкновений при нажатии на педаль тормоза автомобиля 100. Соответственно, при включении тормоза не происходит блокирование срабатывания блока 82 предотвращения столкновений, что позволяет избежать ненужного блокирования срабатывания с применением простой конфигурации.
[0041] Устройство для управления автомобилем 1 согласно данному варианту осуществления включает блок 85 торможения, который автоматически замедляет скорость движения автомобиля 100, а также блок 84 управления, осуществляющий управление блоком 82 предотвращения столкновений таким образом, чтобы не блокировать срабатывание блока 82 предотвращения столкновений, если блок 85 торможения снижает скорость автомобиля 100. Соответственно, даже при наличии в автомобиле установленной системы безопасности, такой как PCS, для контроля и предотвращения столкновений, управление предотвращением столкновений в момент торможения выполняется просто, что позволяет избежать ненужного блокирования выполнения данной операции.
[0042] Вышеуказанный вариант осуществления является примером устройства для управления автомобилем в соответствии с настоящим изобретением, однако конструкция устройства для управления автомобилем не ограничивается указанным вариантом осуществления изобретения. Устройство для управления автомобилем в соответствии с настоящим изобретением может быть модифицировано без отклонения от сути прилагаемых пунктов формулы изобретения, а также может применяться к другим устройствам.
[0043] Например, в вышеуказанном варианте осуществления изобретения описано, что выполняются два вида измерений для определения того, срабатывает ли торможение PCS, и определения того, что замедление автомобиля 100 больше или равно пороговому значению А, как показано на этапах S12 и S14 на ФИГ. 2, однако может выполняться только одно из измерений.
[0044] В вышеуказанном варианте осуществления описывается пример, в котором блок 84 управления изменяет пороговое значение определения в блоке 81 обнаружения препятствий таким образом, чтобы упростить для блока 82 предотвращения столкновений выполнение управления предотвращением столкновений при срабатывании тормоза, или если торможение автомобиля 100 больше или равно пороговому значению А. Однако данный способ упрощения выполнения управления предотвращением столкновения не ограничивается приведенным примером. Например, пороговое значение определения может рассчитываться на основе, по меньшей мере, одного из: снижения скорости автомобиля 100 и/или состояния торможения автомобиля 100, при этом пороговое значение может динамически задаваться для каждого случая. Соответственно, можно управлять работой блока 82 предотвращения столкновений с большей точностью. Блок 84 управления может смягчать блокировку срабатывания блока 82 предотвращения столкновений в момент замедления без применения порогового значения.
[0045] В вышеуказанном варианте осуществления описан пример с использованием датчика 2-миллиметровых волн, однако вместо датчика 2-миллиметровых волн может использоваться датчик, в котором применяются РЧ-волны другого диапазона волн, такие как микроволны или субмиллиметровые волны. Любой датчик может использоваться вместо датчика 2-миллиметровых волн, если он способен определять пространственное расположение автомобиля 100 и объектов вокруг автомобиля 100.
Список обозначений
[0046] 1: устройство для управления автомобилем
2: датчик миллиметровых волн
3: датчик автомобиля
8: электронный блок управления (блок ЭБУ)
31: датчик тормоза
32: датчик скорости
33: датчик ускорения
34: датчик скорости рыскания
81: блок обнаружения препятствий
82: блок предотвращения столкновений
83: блок определения режима поворота
84: блок управления
85: блок торможения
100: автомобиль
А: пороговое значение
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОМОЩИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ | 2020 |
|
RU2737180C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2020 |
|
RU2740820C1 |
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ | 2016 |
|
RU2654839C2 |
| СИСТЕМА ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2694878C1 |
| ВСПОМОГАТЕЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2570191C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2737069C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И ИНТЕРФЕЙС УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2021 |
|
RU2754020C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2753080C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2754021C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ, ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2484993C1 |
Изобретение относится к устройству управления автомобилем, включающему устройство предотвращения столкновений. Устройство для управления автомобилем содержит блок предотвращения столкновений, выполняющий управление предотвращением столкновения автомобиля с объектом вблизи автомобиля, и блок управления. Действие блока предотвращения столкновений блокируется в случае определения движения автомобиля на повороте. Блок управления осуществляет управление блоком предотвращения столкновений таким образом, чтобы не блокировать действие блока предотвращения столкновений при торможении автомобиля. Достигается создание устройства для управления автомобилем с повышенной точностью определения необходимости блокирования работы устройства предотвращения столкновений. 3 з.п. ф-лы, 3 ил.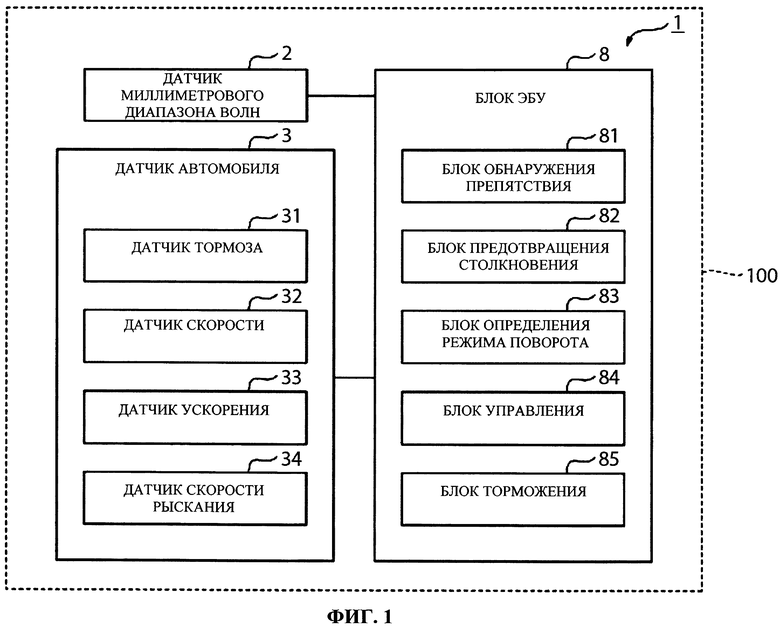
1. Устройство для управления автомобилем, содержащее:
блок предотвращения столкновений, который выполняет управление предотвращением столкновения автомобиля с объектом вблизи автомобиля; при этом работа блока предотвращения столкновений блокируется в случае определения движения на повороте; и
блок управления, который управляет работой блока предотвращения столкновений таким образом, чтобы не блокировать действие блока предотвращения столкновений в случае замедления скорости автомобиля.
2. Устройство для управления автомобилем по п. 1, отличающееся тем, что блок управления осуществляет управление работой блока предотвращения столкновений так, чтобы не блокировать действие блока предотвращения столкновений, если замедление скорости автомобиля больше или равно пороговому значению.
3. Устройство для управления автомобилем по п. 1, отличающееся тем, что блок управления осуществляет управление работой блока предотвращения столкновений так, чтобы не блокировать действие блока предотвращения столкновений при срабатывании тормоза автомобиля.
4. Устройство для управления автомобилем по любому из пп. 1-3, отличающееся тем, что оно дополнительно включает блок торможения, автоматически снижающий скорость автомобиля,
при этом блок управления осуществляет управление работой блока предотвращения столкновений так, чтобы не блокировать действие блока предотвращения столкновений при торможении автомобиля блоком торможения.
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2305641C1 |
| WO 03007271 A2, 23.01.2003 | |||
| WO 2011125168 A1, 13.10.2011. | |||

