Изобретение относится к автомобилестроению, в частности, к способам и устройствам повышения активной безопасности транспортных средств, включая беспилотные.
Известно устройство управления транспортным средством (см. опубликованную заявку США №US 20190210597 А1, заявители DENSO CORPORATION, опубл. 11.07.2019), предназначенное для предотвращения столкновений с объектами в передней полусфере, которое состоит из блока управления предотвращением столкновения, блока оценки состояния исполнительных механизмов, блока задания состояний исполнительных механизмов, включая тормозную систему и рулевое управление. Объезд препятствия предусматривается по инициативе водителя без учета автоматического обнаружения препятствий на соседних полосах движения, как одновременно с автоматическим торможением, так и без него.
Недостатками данного устройства являются отсутствие ограничений на величину тормозного замедления, необходимого для предотвращения столкновений с задним попутным препятствием, недостаточная достоверность данных о коэффициентах трения скольжения колес, определяемых по показаниям датчика температуры окружающей среды или по карте погоды, а также отсутствие автоматизации маневра объезда препятствия.
Устройство для оценки коэффициента сцепления с дорожной поверхностью и способ его осуществления (см. патент Юж. Кореи №KR 1020180123366, заявители Korea Automotive Technology Institute, опубл. 08.11.2019), которое предназначено для идентификации топовых значений коэффициентов трения скольжения колес по пробным тестовым торможениям для определения максимального замедления колесного транспортного средства. Устройство для оценки коэффициента трения с использованием предупреждающего торможения может включать в себя: блок регулировки коэффициента торможения, выполненный с возможностью регулировки коэффициента распределения тормозной силы передних и задних колес; детектор для определения величины скольжения и коэффициента трения в контакте шины с поверхностью дороги во время предупреждающего торможения в соответствии с коэффициентом распределения тормозных усилий передних и задних колес и детектор коэффициента трения для определения коэффициента трения дорожного покрытия на основе обнаруженной величины скольжения и коэффициента трения в контакте шины с поверхностью дороги.
Недостатком предлагаемого устройства является ограниченная возможность идентификации параметров сцепления шин с поверхностью условиями предупреждающих торможений. В условиях движения по поверхностям с переменным коэффициентом сцепления данный метод оказывается неприменим. В условиях движения временные интервалы торможений, включая вспомогательные занимают до 10% общего времени, что не позволяет считать данные идентификации адекватными.
Известно устройство и способ автоматического торможения транспортного средства (см. патент КНР №CN 104875730 В, заявитель QOROS AUTOMOTIVE CO., LTD, опубл. 08.05.2018), которое включает в себя модуль обнаружения переднего препятствия, модуль обнаружения заднего препятствия, модуль управления и модуль тормоза. В рассматриваемом устройстве и способе рассчитываются значения времени до столкновения с передним и задним препятствиями, на основе их анализа формируется управляющее воздействие на тормоза, что должно обеспечивать предотвращение столкновений с препятствиями на полосе движения.
Недостатками рассмотренного устройства являются отсутствие предусмотренного объезда препятствия в случае неминуемого столкновения с препятствиями на полосе движения, а также не предусмотрена идентификация коэффициента сцепления шин с поверхностью, определяющая верхнюю границу тормозного замедления без блокирования колес.
Известно автомобильное автоматическое управляющее устройство для предотвращения столкновений с препятствиями с использованием датчиком интернета вещей (см. опубликованную заявку КНР №CN 106915347 A, заявители TIANJIN HUAFANG TECH СО LTD, опубл. 04.07.2017), которое включает радарный модуль определения расстояния, модуль машинного зрения, модуль управления тормозами и модуль управления рулевым колесом. Объезд переднего препятствия выполняется в том случае, когда модуль машинного зрения не обнаруживает препятствий на соседних полосах движения. Если препятствия на соседних полосах обнаруживаются, то выполняется торможение по данным радарного модуля определения расстояния в передней полусфере.
Недостатками предлагаемого технического решения являются отсутствие идентификации коэффициентов сцепления шин с поверхностью, определяющего верхнюю границу тормозного замедления без блокирования колес, а также отсутствие ограничения замедления, определяемого дистанцией до заднего препятствия на полосе движения.
Наиболее близким по технической сущности является система предупреждения и предотвращения столкновений транспортного средства, которая использует комбинированное автоматическое управление курсом и тормозами и содержит средства определения пороговых значений, которые идентифицируют время до столкновения с препятствием и на основании анализа параметров движения объекта, включая коэффициенты сцепления шин с поверхностью, и препятствия выбирается либо предупреждение, либо торможение, либо объезд препятствия (см. патент США №US 8527172 B2, заявители Nikolai K. Moshchuk [US], Shih-Ken Chen [US], Chad T. Zagorski [US], Aamrapali Chatterjee [US], опубл. 03.09.2013).
Недостатками рассмотренной системы являются отсутствие учета параметров движения заднего попутного препятствия при торможении на полосе и отсутствие ограничения на величину тормозного замедления, необходимого для предотвращения столкновения с задним попутным препятствием.
Техническая задача, на решение которой направлено предлагаемое изобретение, состоит в идентификации сцепления колес с дорожным покрытием, прогнозировании наибольшего замедления без блокирования колес, ограничении замедления задним препятствием, оптимальном управлении торможением для предотвращения столкновений с препятствиями и формировании управляющих воздействий на тормоза, акселератор и рулевое колесо, а также в активации звуковой и световой сигнализации в опасных ситуациях.
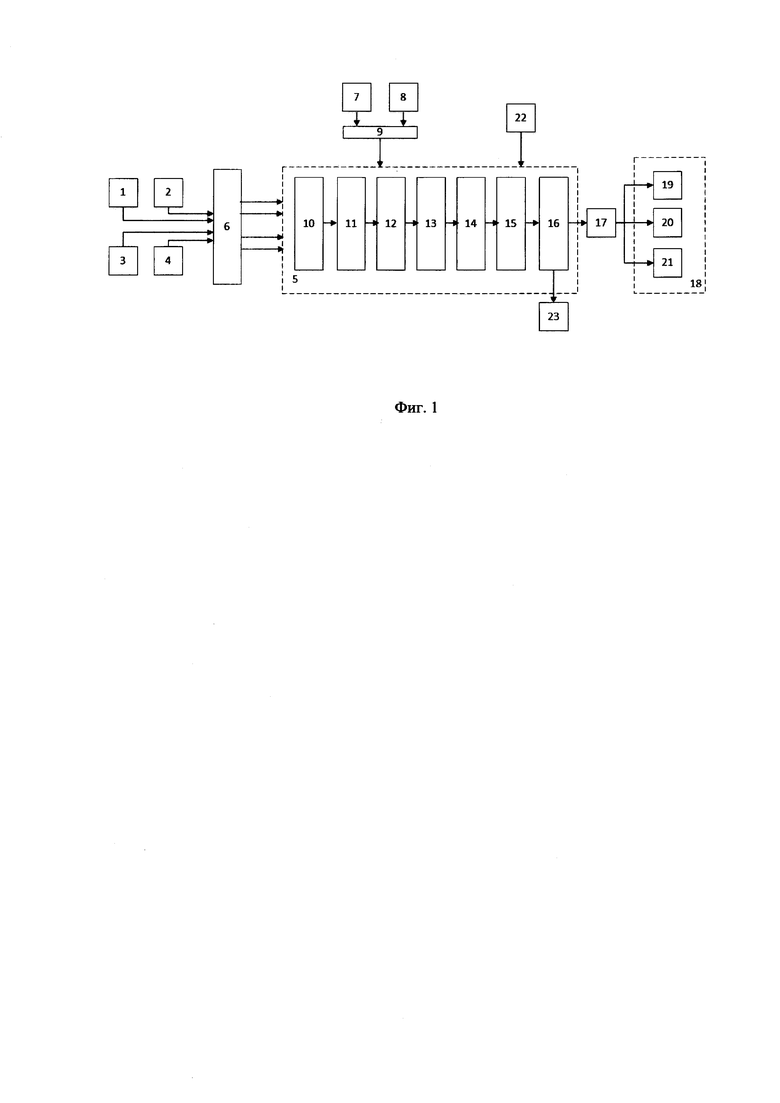
Поставленная техническая задача решается тем, что согласно предложенному изобретению система автоматического торможения колесного транспортного средства, содержащая датчики 1, 2, 3, 4 частот вращения колес, электрически связанные с микроконтроллерным устройством 5 обработки информации, посредством линий связи с устройством 6 сопряжения, устройства технического зрения для передней 7 и задней 8 полусфер, электрически связанные с микроконтроллерным устройством 5 обработки информации посредством линий связи с устройством 9 сопряжения устройств технического зрения с микроконтроллерным устройством 5, микроконтроллерное устройство 5 обработки информации включает блок 10 анализа сигналов датчиков 1, 2, 3, 4 частот вращения колес, блок 11 оценивания параметров движения транспортного средства, блок 12 идентификации максимальных значений коэффициентов трения скольжения колес, блок 13 прогнозирования наибольшего замедления без блокирования колес, блок 14 ограничения замедления задним препятствием, блок 15 оптимизации управления для предотвращения столкновений, блок 16 формирования сигналов управления, блок 17 формирования управляющих воздействий на органы управления 18 транспортного средства: тормоза 19, акселератор 20, рулевое колесо 21,
причем в системе блоки 10 анализа, 11 оценивания, 12 идентификации, 13 прогнозирования, 14 ограничения, 15 оптимизации, 16 формирования сигналов управления выполнены на базе микроконтроллерного устройства 5 с возможностью программного исполнения блока 10 анализа сигналов датчиков 1, 2, 3, 4 частот вращения колес, блока 11 оценивания параметров движения транспортного средства, блока 12 идентификации максимальных значений коэффициентов трения скольжения колес, блока 13 прогнозирования наибольшего замедления без блокирования колес, блока 14 ограничения замедления задним препятствием, блока 15 оптимизации управления торможением, блока 16 формирования сигналов управления для управляющих воздействий на органы 18 управления транспортным средством, при этом система дополнительно снабжена устройством 22 ввода и отображения настроечных данных, устройством 17 формирования управляющих воздействий на органы управления тормозами 19, акселератором 20 и рулевым колесом 21, а устройство 23 формирования звуковой и световой сигнализации выполнено с возможностью передачи аварийного сигнала управления на беспилотные транспортные средства, располагающиеся сзади и подключается к устройству 17 формирования управляющих воздействий на органы управления транспортным средством (см. Фигуру).
К числу преимуществ, т.е. технических результатов, достигаемых системой автоматического торможения, следует отнести:
- возможность предотвращения столкновений с препятствиями, следующими в попутном направлении впереди и сзади транспортного средства, путем автоматического ограничения замедления при торможении, своевременном оповещении и передаче аварийного сигнала соседним беспилотным транспортным средствам в опасных ситуациях;
- возможность автоматического анализа сценариев предотвращения столкновений, предусматривающих безопасный объезд переднего препятствия, в случае, когда столкновение с препятствием на полосе движения нельзя предотвратить торможением;
- идентификация максимальных значений коэффициента трения скольжения колес выполняется во всех режимах движения транспортного средства, включая разгоны, движение с постоянной скоростью и торможение;
- исключение режима прерывистого торможения, снижающего его эффективность на неровных и скользких поверхностях;
- предотвращение блокирования колес при торможении с сохранением курсовой управляемости;
- сохранение работоспособности системы в случае возникновения неисправности не более, чем в 3-х из 4-х датчиках частот вращения колес.
Технический результат достигается за счет создания системы автоматического торможения колесного транспортного средства, в которой блоки связаны определенным образом.
На чертеже (Фигуре) показана блок-схема системы автоматического торможения колесного транспортного средства.
Система автоматического торможения колесного транспортного средства содержит датчики 1, 2, 3, 4 частот вращения колес, электрически связанные с микроконтроллерным устройством 5 обработки информации, посредством линий связи с устройством 6 сопряжения, устройства технического зрения для передней 7 и задней 8 полусфер, электрически связанные с микроконтроллерным устройством 5 обработки информации посредством линий связи с устройством 9 сопряжения устройств технического зрения с микроконтроллерным устройством 5, микроконтроллерное устройство 5 обработки информации включает блок 10 анализа сигналов датчиков 1, 2, 3, 4 частот вращения колес, блок 11 оценивания параметров движения транспортного средства, блок 12 идентификации максимальных значений коэффициентов трения скольжения колес, блок 13 прогнозирования наибольшего замедления без блокирования колес, блок 14 ограничения замедления задним препятствием, блок 15 оптимизации управления для предотвращения столкновений, блок 16 формирования сигналов управления, блок 17 формирования управляющих воздействий на органы управления 18 транспортного средства: тормоза 19, акселератор 20, рулевое колесо 21, отличающаяся тем, что в системе блоки 10 анализа, 11 оценивания, 12 идентификации, 13 прогнозирования, 14 ограничения, 15 оптимизации, 16 формирования сигналов управления выполнены на базе микроконтроллерного устройства 5 с возможностью программного исполнения блока 10 анализа сигналов датчиков 1, 2, 3, 4 частот вращения колес, блока 11 оценивания параметров движения транспортного средства, блока 12 идентификации максимальных значений коэффициентов трения скольжения колес, блока 13 прогнозирования наибольшего замедления без блокирования колес, блока 14 ограничения замедления задним препятствием, блока 15 оптимизации управления торможением, блока 16 формирования сигналов управления для управляющих воздействий на органы 18 управления транспортным средством, блок 10 анализа сигналов датчиков 1, 2, 3, 4 частот вращения колес выполнен с возможностью выявления неисправных датчиков, данные которых исключаются из дальнейшего анализа, блок 12 идентификации максимальных значений коэффициентов трения скольжения выполнен с возможностью оценки этих параметров, по меньшей мере, по сигналу от одного датчика частоты вращения колес по каждому борту, блок 13 прогнозирования наибольшего замедления без блокирования колес выполнен с возможностью оценки этого параметра в случае отсутствия сигнала датчиков частот вращения колес по настроечным данным вводимых с устройства 22 ввода и отображения настроечных данных, блок 14 ограничения замедления задним препятствием выполнен с учетом ограничений на безопасное перестроение в соседние ряды, блок 15 оптимизации управления торможением выполнен с возможностью автоматического выбора наилучшей последовательности управляющих воздействий на тормоза, акселератор и рулевое колесо для предотвращения столкновений с препятствиями в передней и задней полусферах, блок 16 формирования сигналов управления выполнен с возможностью активации световой сигнализации об имитации торможения в случае опасного сокращения дистанции с задним препятствием и активации аварийной сигнализации в случае прогнозирования неизбежного столкновения с препятствиями, при этом порог срабатывания тормозной системы в блоке 15 оптимизации управления торможением устанавливается программно в кратное число раз меньше наибольшего замедления без блокирования колес для компенсации влияния возможных ошибок прогнозирования из-за неучтенных факторов, при этом система дополнительно снабжена устройством 22 ввода и отображения настроечных данных, устройством 17 формирования управляющих воздействий на органы управления тормозами 19, акселератором 20 и рулевым колесом 21, а устройство 23 формирования звуковой и световой сигнализации выполнено с возможностью передачи аварийного сигнала управления на беспилотные транспортные средства, располагающиеся сзади и подключается к устройству 17 формирования управляющих воздействий на органы управления транспортным средством (см. Фигуру).
Предложенная система работает следующим образом.
При движении транспортного средства датчики 1, 2, 3, 4 вырабатывают сигналы о частотах вращения колес транспортного средства, а так как они электрически связаны с микроконтроллерным устройством 5, то эти сигналы посредством линий связи с устройством сопряжения 6 постоянно поступают в микроконтроллерное устройство 5 обработки информации, которое включает программный блок 10 анализа сигналов датчиков частот вращения колес, которое сравнивает их значение с рабочим диапазоном сигналов датчиков и выявляет датчики у которых возникли неисправности в виде пропадания сигнала на граничном временном интервале, при этом автоматические показания такого датчика исключаются из дальнейшего анализа (см. Фигуру).
Данные о пространственном положении препятствий в передней и задней полусфере поступают с устройств технического зрения для передней 7 и задней 8 полусфер, электрические связанных с микропроцессорным устройством 5 обработки информации посредством линий связи с устройством 9 сопряжения устройств технического зрения с микроконтроллерным устройством 5.
Далее, в микроконтроллерном устройстве 5 обработки информации программный блок оценивания 11 параметров движения транспортного средства сравнивает сигналы от датчиков 1, 2, 3, 4 частот вращения колес транспортного средства и получает данные, характеризующие параметры движения транспортного средства (Свидетельство о государственной регистрации программы для ЭВМ №2009616286. Программа «ИНКА-СПОРТ версия 2.0» / Бузников С.Е., Елкин Д.С.// Роспатент 2009 г.).
В блоке 12 идентификации максимальных значений коэффициентов трения скольжения колес на основании полученных оценок скоростей продольных скольжений колес, тягово-тормозных ускорений центра масс, угле поворота управляемых колес, распределения масс по осям транспортного средства в производится идентификация максимальных значений коэффициентов трения скольжения колес с использованием программного исполнения этой функции (Свидетельство о государственной регистрации программы для ЭВМ №2007610818 «Идентификация максимальных значений коэффициентов трения скольжения колес автомобиля» / Бузников С.Е., Елкин Д.С.// Роспатент, 2007).
В блоке 13 прогнозирования наибольшего замедления без блокирования колес на основании полученных оценок максимальных значений коэффициентов трения скольжения колес и настроечных данных транспортного средства определяются граничные значения управляющих воздействий на тормоза колес на границе их блокирования и из них и наибольшего управляющего воздействия на тормоза, ограниченного конструкцией тормозной системы выбирается минимальное, что обеспечивает выполнение достаточных условий отсутствия блокирования колес при торможении.
По величине найденного значения граничного управляющего воздействия на тормозную систему определяются максимальные замедления транспортного средства в конкретных условиях движения.
В блоке 14 ограничения замедления задним препятствием данные о дистанциях до ближайших препятствий в передней и задней полусферах, поступающие от устройств технического зрения 16 и 17 ограничения замедления задним препятствием программно обрабатываются и позволяют получить информацию о скорости, относительном положении и ускорении препятствий, находящихся на полосе движения транспортного средства и на соседних полосах движения (Свидетельство о государственной регистрации программы для ЭВМ №2019618610 «Программа контроля положения ведомого беспилотного ТС относительно кормы ведущего ТС по данным видеокамеры» / Бузников С.Е., Луценко Е.В., Струков В.О., Логинов И.Д. // Роспатент, 2019, Свидетельство о государственной регистрации программы для ЭВМ №2019662025 «Программа определения относительного пространственного положения ведомого автомобиля относительно ведущего по данным радара» / Бузников С.Е., Елкин Д.С, Струков В.О., Логинов И.Д. // Роспатент, 2019).
По величине дистанции до заднего препятствия и его скорости определяется значение замедления управляемого транспортного средства, ограничивающее его замедление при котором исключается столкновение с задним препятствием. Минимальное из наибольшего замедления без блокирования колес и ограничивающего замедления задним препятствием образует верхнюю границу допустимых замедлений, обеспечивающих предотвращение блокирование колес и столкновение с задним препятствием.
В блоке 15 оптимизации управления торможением по величине дистанции до переднего препятствия и его скорости определяется требуемое значение замедления, достаточное для предотвращения столкновения с передним препятствием (Свидетельство о государственной регистрации программы для ЭВМ №2017610762 «Программа управления автоматическим торможением колесного транспортного средства» / Бузников С.Е., Елкин Д.С, Струков В.О. // Роспатент, 2017). Если значение требуемого замедления превышает пороговый уровень и не превышает верхнюю границу допустимых замедлений, то формируется сигнал управления для тормозной системы и сигнал управления на акселератор. Величина порогового уровня замедления задается в настроечных данных в определенное число раз меньше наибольшего замедления без блокирования колес для компенсации влияния неучтенных факторов при прогнозировании наибольшего замедления без блокирования колес. К числу неучтенных факторов, влияющих на динамические характеристики торможения, относятся наличие влаги на рабочих поверхностях тормозов, их температуры, состояния дорожного покрытия с переменным коэффициентами трения скольжения, что обусловлено чередованием участков чистого асфальта и асфальта покрытого слоем льда и снега.
Если требуемое замедление превосходит верхнюю границу допустимых замедлений, то если выполняются условия предотвращения столкновений с препятствиями на соседних полосах движения, формируется последовательность управляющих сигналов на рулевое управление для объезда препятствия.
Если величина ограничения замедления задним препятствием оказывается меньше наибольшего замедления без блокирования колес, то в блоке 15 оптимизации управления торможением формируется сигнал имитации торможения с целью увеличения дистанции с задним препятствием до безопасного уровня и затем передается в блок 16 формирования сигналов управления для управляющих воздействий, и далее на устройство 23 формирования звуковой и световой сигнализации.
Если требуемое значение замедления превосходит верхнюю границу допустимых замедлений и условия предотвращения столкновений с препятствиями не выполняются, то в устройстве 23 формирования звуковой и световой сигнализации формируется сигнал активации звуковой и световой сигнализации с целью предупреждения окружающих о неминуемом столкновении.
Блок 16 формирования сигналов управления для управляющих воздействий на органы 18 управления транспортным средством реализуется программно в микроконтроллерном устройстве 5 на основании выбора оптимального сценария управления торможением в блоке 15 оптимизации управления торможением.
В блоке 17 формирования управляющих воздействий на органы управления 18 транспортного средства сигналы управления блока 16 преобразуются с помощью исполнительных устройств в управляющие воздействия на органы управления 18 транспортного средства: тормоза 19, акселератор 20, рулевое колесо 21.
Устройство 22 ввода и отображения настроечных данных предназначено для ввода, коррекции и отображения параметров настройки предлагаемой системы.
Устройство 23 формирования звуковой и световой сигнализации используется как по основному назначению, так и для имитации торможения в случае, когда дистанция до заднего транспортного средства оказывается меньше безопасной, а также в случае прогнозирования столкновения с препятствиями активируется аварийный режим его работы.
Отличие конструктивных особенностей предложенной системы и ее функционирования по сравнению с известными конструкциями описаны ниже.
Если в системе блоки 10 анализа, 11 оценивания, 12 идентификации, 13 прогнозирования, 14 ограничения, 15 оптимизации и 16 формирования сигналов управления выполнены на базе микроконтроллерного устройства 5 в виде программных блоков, работающих с возможностью программного исполнения функций блока 10 анализа сигналов датчиков 1, 2, 3, 4 частоты вращения колес, блока 11 оценивания параметров движения транспортного средства, блока 12 идентификации максимальных значений коэффициентов трения скольжения колес, блока 13 прогнозирования наибольшего замедления без блокирования колес, блока 14 ограничения замедления задним препятствием, блока 15 оптимизации управления торможением, блока 16 формирования сигналов для блока 17 управляющих воздействий на органы 18 управления транспортным средством, то такое выполнение позволяет значительно ускорить процессы анализа сигналов датчиков 1, 2, 3, 4 частот вращения колес, оценивания параметров движения транспортного средства, идентификации максимальных значений коэффициентов трения скольжения колес, прогнозирования наибольшего замедления без блокирования колес, ограничения замедления задним препятствием, оптимизации управления торможением, правильно оценивать ситуацию и оперативно формировать последовательность управляющих воздействий на органы 18 управления транспортного средства (см. Фигуру).
Причем блок 10 анализа сигналов датчиков 1, 2, 3, 4 частот вращения колес выполнен с возможностью выявления неисправных датчиков, данные которых исключаются из дальнейшего анализа, блок 12 идентификации максимальных значений коэффициентов трения скольжения колес выполнен с возможностью оценки этих параметров, по меньшей мере, по сигналу от одного датчика частоты вращения колес по каждому борту, блок 13 прогнозирования наибольшего значения замедления без блокирования колес выполнен с возможностью оценки этого параметра в случае отсутствия сигналов датчиков частот вращения колес по настроечным данным, вводимых с устройства 22 ввода и отображения настроечных параметров, блок 14 ограничения замедления задним препятствием выполнен с возможностью учета ограничений на безопасные перестроения в соседние ряды, блок 15 оптимизации управления торможением выполнен с возможностью автоматического выбора наилучшей последовательности управляющих воздействий на тормоза 19, акселератор 20 и рулевое колесо 21 для предотвращения столкновений с препятствиями в передней и задней полусферах, блок 16 формирования сигналов управления выполнен с возможностью активации световой сигнализации при имитации торможения в случае опасного сокращения дистанции задним препятствием и активации аварийной световой и звуковой сигнализации в случае прогнозирования неизбежного столкновения с препятствиями, при этом порог срабатывания тормозной системы в блоке 15 устанавливается программно в кратное число раз меньшее наибольшего замедления без блокирования колес для компенсации влияния возможных ошибок прогнозирования и неучтенных факторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система стабилизации безопасной скорости колесного транспортного средства | 2019 |
|
RU2744642C1 |
| Система идентификации максимальных значений коэффициентов трения скольжения колёс транспортного средства | 2022 |
|
RU2779538C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СНОСА И ЗАНОСА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2702878C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| Система идентификации максимальных значений коэффициентов трения скольжения колёс автомобиля и прицепа в составе системы управления движением автопоезда | 2023 |
|
RU2812025C1 |
| Система контроля и предотвращения дополнительного рыскания колёс автомобиля | 2023 |
|
RU2812030C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ С ПРЕПЯТСТВИЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2335805C1 |
| Способ предотвращения сноса и заноса колёс системой помощи водителю автопоезда | 2023 |
|
RU2812000C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2702877C1 |
| УСТРОЙСТВО ПОМОЩИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ | 2020 |
|
RU2737180C1 |
Предложена система автоматического торможения колесного транспортного средства. Система содержит датчики (1, 2, 3, 4) частот вращения колес, устройства технического зрения. Микроконтроллер (5) содержит блок (10) анализа сигналов датчиков (1, 2, 3, 4) частот вращения колес, блок (11) оценивания параметров движения транспортного средства, блок (12) идентификации максимальных значений коэффициентов трения скольжения колес, блок (13) прогнозирования наибольшего замедления без блокирования колес, блок (14) ограничения замедления задним препятствием, блок (15) оптимизации управления для предотвращения столкновений, блок (16) формирования сигналов управления, блок (17) формирования управляющих воздействий на органы управления (18) транспортного средства: тормоза (19), акселератор (20), рулевое колесо (21). Вышеуказанные блоки выполнены на базе микроконтроллера (5) с возможностью программного исполнения. Порог срабатывания тормозной системы в блоке (15) устанавливают программно в кратное число раз меньше наибольшего замедления без блокирования колес для компенсации влияния возможных ошибок прогнозирования из-за неучтенных факторов. Система содержит устройство (22) ввода и отображения настроечных данных. Устройство (23) формирования звуковой и световой сигнализации передает аварийный сигнал управления на беспилотные транспортные средства, располагающиеся сзади, и подключается к устройству (17) управления. Достигается идентификация сцепления колес с дорожным покрытием, прогнозирование наибольшего замедления без блокирования колес, ограничение замедления задним препятствием, оптимальное управление торможением. 1 ил.
Система автоматического торможения колесного транспортного средства содержит датчики (1, 2, 3, 4) частот вращения колес, электрически связанные с микроконтроллерным устройством 5 обработки информации посредством линий связи с устройством (6) сопряжения, устройства технического зрения для передней (7) и задней (8) полусфер, электрически связанные с микроконтроллерным устройством (5) обработки информации посредством линий связи с устройством (9) сопряжения устройств технического зрения с микроконтроллерным устройством (5), микроконтроллерное устройство (5) обработки информации включает блок (10) анализа сигналов датчиков (1, 2, 3, 4) частот вращения колес, блок (11) оценивания параметров движения транспортного средства, блок (12) идентификации максимальных значений коэффициентов трения скольжения колес, блок (13) прогнозирования наибольшего замедления без блокирования колес, блок (14) ограничения замедления задним препятствием, блок (15) оптимизации управления для предотвращения столкновений, блок (16) формирования сигналов управления, блок (17) формирования управляющих воздействий на органы управления (18) транспортного средства: тормоза (19), акселератор (20), рулевое колесо (21), отличающаяся тем, что в системе блоки (10) анализа, (11) оценивания, (12) идентификации, (13) прогнозирования, (14) ограничения, (15) оптимизации, (16) формирования сигналов управления выполнены на базе микроконтроллерного устройства (5) с возможностью программного исполнения блока (10) анализа сигналов датчиков (1, 2, 3, 4) частот вращения колес, блока (11) оценивания параметров движения транспортного средства, блока (12) идентификации максимальных значений коэффициентов трения скольжения колес, блока (13) прогнозирования наибольшего замедления без блокирования колес, блока (14) ограничения замедления задним препятствием, блока (15) оптимизации управления торможением, блока (16) формирования сигналов управления для управляющих воздействий на органы (18) управления транспортным средством, блок (10) анализа сигналов датчиков (1, 2, 3, 4) частот вращения колес выполнен с возможностью выявления неисправных датчиков, данные которых исключаются из дальнейшего анализа, блок (12) идентификации максимальных значений коэффициентов трения скольжения выполнен с возможностью оценки этих параметров, по меньшей мере, по сигналу от одного датчика частоты вращения колес по каждому борту, блок (13) прогнозирования наибольшего замедления без блокирования колес выполнен с возможностью оценки этого параметра в случае отсутствия сигнала датчиков частот вращения колес по настроечным данным вводимых с устройства (22) ввода и отображения настроечных данных, блок (14) ограничения замедления задним препятствием выполнен с учетом ограничений на безопасное перестроение в соседние ряды, блок (15) оптимизации управления торможением выполнен с возможностью автоматического выбора наилучшей последовательности управляющих воздействий на тормоза, акселератор и рулевое колесо для предотвращения столкновений с препятствиями в передней и задней полусферах, блок (16) формирования сигналов управления выполнен с возможностью активации световой сигнализации об имитации торможения в случае опасного сокращения дистанции с задним препятствием и активации аварийной сигнализации в случае прогнозирования неизбежного столкновения с препятствиями, при этом порог срабатывания тормозной системы в блоке (15) оптимизации управления торможением устанавливается программно в кратное число раз меньше наибольшего замедления без блокирования колес для компенсации влияния возможных ошибок прогнозирования из-за неучтенных факторов, при этом система дополнительно снабжена устройством (22) ввода и отображения настроечных данных, устройством (17) формирования управляющих воздействий на органы управления тормозами (19), акселератором (20) и рулевым колесом (21), а устройство (23) формирования звуковой и световой сигнализации выполнено с возможностью передачи аварийного сигнала управления на беспилотные транспортные средства, располагающиеся сзади, и подключается к устройству (17) формирования управляющих воздействий на органы управления транспортным средством.
| US 2015203117 A1, 23.07.2015 | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| US 2010256836 A1, 07.10.2010 | |||
| DE 102006043364 A1, 10.05.2007 | |||
| WO 9209060 A1, 29.05.1992. | |||

