Изобретение относится к транспортной технике и может быть использовано в автоматических устройствах управления транспортным средством для предотвращения столкновений автомобилей за счет управления изменением скорости и направления движения при внезапно возникающих препятствиях.
Известно устройство для автоматического торможения транспортного средства перед препятствием (Авторское свидетельство СССР № 779118, МПК В60Т 7/12, 1980 г.), содержащее локатор, блок измерения абсолютной скорости транспортного средства, блок вычисления безопасной дистанции между транспортным средством и лидером, дифференциатор, блок определения установившегося замедления транспортного средства, датчик давления в приводе тормозов, датчик начала торможения, детектор предельного замедления, блок определения запаздывания тормозов, блок определения установившегося замедления лидера, запоминающее устройство, блок определения поправки d к величине безопасной дистанции, блок сравнения, блок индикации.
Недостаток известного устройства заключается в том, что при внезапно возникшем препятствии расстояние от автомобиля до препятствия может оказаться меньше минимально возможного тормозного пути, и устройство не сможет предотвратить столкновение.
Технический результат направлен на расширение функциональных возможностей систем управления и повышение безопасности дорожного движения.
Технический результат достигается тем, что устройство, содержащее блок измерения абсолютной скорости транспортного средства, связанный с дифференциатором и с блоком вычисления безопасной дистанции между транспортным средством и лидером, выход которого подключен к блоку сравнения, связанному с исполнительными органами тормозной системы и системы управления двигателем, локатор, один из выходов которого подключен к упомянутому блоку сравнения, а другой - к упомянутому блоку вычисления безопасной дистанции, блок определения установившегося замедления транспортного средства, связанный с выходом дифференциатора, и детектором предельного замедления, выходы которых подключены к входам блока определения установившегося замедления лидера, блок определения запаздывания тормозов; запоминающее устройство, информационные входы которого подключены к выходам указанных блоков определения установившегося замедления лидера, установившегося замедления транспортного средства и запаздывания тормозов, а разрешающий вход - к выходу детектора предельного замедления, блок определения поправки к величине безопасной дистанции, выход которого подключен к блоку сравнения, а входы связаны с указанными запоминающим устройством и блоком измерения абсолютной скорости, датчики давления в приводе тормозов и начала торможения, выходы которых совместно с выходом дифференциатора подключены к детектору предельного замедления и блоку определения запаздывания тормозов, при этом устройство дополнительно снабжено блоком определения угла поворота управляемых колес, связанным с блоком вычисления безопасной дистанции, блоком индикации и исполнительным органом рулевого управления.
На чертеже представлена блок-схема автоматического устройства для предотвращения столкновений транспортного средства.
Предлагаемое устройство представляет совокупность локатора 1 для определения расстояния L и относительной скорости Vотн до препятствия (лидера), блока 2 измерения абсолютной скорости Vабс транспортного средства, подключенных к блоку 3 вычисления безопасной дистанции D между транспортным средством и лидером. Выход блока 2 измерения абсолютной скорости подсоединен к входу дифференциатора 4, выход которого подключен к входу блока 5 определения, установившегося замедления транспортного средства и параллельно с выходами датчиков 6 и 7 давления в приводе тормозов и начала торможения к входам детектора 8 предельного замедления и блока 9 определения запаздывания тормозов, причем выход блока 5 определения установившегося замедления и детектора 8 подсоединены к входам блока 10 определения установившегося замедления лидера, выход которого совместно с выходами блоков 5 и 9 определения установившегося замедления транспортного средства и запаздывания тормозов подключены к информационным входам запоминающего устройства 11, к разрешающему входу которого подключен выход детектора 8, а выходы запоминающего устройства 11 совместно с выходом блока 2 измерения абсолютной скорости подключены к входам блока 12 определения поправки d (увеличения тормозного пути) к величине безопасной дистанции D, выход которого совместно с выходом локатора 1 и блока 3 вычисления безопасной дистанции подсоединены к входам блока 13 сравнения, выход которого подключен к блоку 14 индикации, к исполнительным органам системы управления двигателем 15 и тормозной системой 16, а также блока определения угла поворота управляемых колес 18, вход которого подключен к блоку 13, а выход - к блоку 14 индикации и исполнительным органам рулевого управления 17.
Устройство работает следующим образом. Непрерывно работающий во время движения транспортного средства локатор 1 выдает параметры дистанции до препятствия и относительной скорости Vотн, которые вместе с выдаваемым блоком 2 параметром Vабс поступают в блок 3 вычисления безопасной дистанции D. Одновременно параметр абсолютной скорости Vабс поступает в дифференциатор 4 и блок 12 определения поправки d к величине безопасной дистанции D.
При торможениях, в которых достигнуто и зафиксировано детектором 8 предельное для данных дорожно-климатических условий и технического состояния тормозов замедление, определяются и запоминаются величины предельного осредненного установившегося замедления транспортного средства, лидера и минимальное время запаздывания тормозов. В момент начала торможения, фиксируемого датчиком 7, производится установка на ноль элементов памяти блока 11 и детектора 8, а блок 9 начинает отсчет времени запаздывания tA, который заканчивается в момент начала роста замедления. В этот же момент блок 5 начинает производить определение осредненного установившегося замедления транспортного средства, которое заканчивается через фиксированный отрезок времени, значительно превышающий длительность нарастания замедления до максимума. Детектором 8 фиксируется факт достижения транспортным средством предельного замедления на основе сравнения по времени моментов максимума замедления и давления и сопоставления давления с предельным фиксированным значением. При ограничении величины предельного замедления дорожно-климатическими условиями блок 10 подключает к каналу записи предельного установившегося замедления лидера выход блока 5 определения установившегося замедления транспортного средства. При ограничении замедления транспортного средства его техническим состоянием блок 10 подключает к каналу установившегося замедления лидера фиксированный сигнал, соответствующий предельному замедлению исправного транспортного средства в нормативных условиях. Кроме того, при достижении транспортным средством предельного замедления детектор 8 дает разрешение на прием информации о параметрах от блоков 5, 9 и 10 в запоминающее устройство 11, где параметры обновляются при торможениях, в которых зафиксировано предельное замедление. В промежутках между такими торможениями зафиксированный набор этих параметров используется совместно с величиной абсолютной скорости, непрерывно поступающей в процессе дорожного движения от блока 2, для вычисления блоком 12 поправки d к величине безопасной дистанции D, определяемой блоком 3. Блок 13 сравнения непрерывно в процессе дорожного движения производит сравнение фактического расстояния до препятствия (лидера) с разностью величин безопасной дистанции D и поправки d, первая из которых определяется в функции только абсолютной и относительной скоростей транспортного средства, а вторая - в функции абсолютной скорости Vабс, осредненной предельной величины установившегося замедления транспортного средства Ja, предельного установившегося замедления лидера JЛ, и времени запаздывания тормозов транспортного средства ta. При сокращении фактического расстояния до лидера (препятствия) ниже безопасного уровня блок 13 сравнения вещает команду на включение исполнительных механизмов 15 и 16 управления дроссельной заслонкой и тормозами и на блок 14 индикации.
Управление дальнейшим процессом снижения скорости транспортного средства выполняется аналогично описанному до момента появления внезапно возникшего препятствия. В случае если расстояние до препятствия меньше минимально возможного тормозного пути, блок 13 сравнения выдает команду на блок 18 определения угла поворота управляемых колес. Блок 18 определяет оптимальный для возникших условий угол поворота управляемых колес и выдает управляющий сигнал на включение органов рулевого управления 17 и на блок 14 индикации.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2316822C1 |
| Устройство для автоматического торможения транспортного средства перед препятствием | 1978 |
|
SU779118A1 |
| Устройство для автоматического торможения автомобиля | 1988 |
|
SU1643245A1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЯ С ПРЕПЯТСТВИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429505C1 |
| Система торможения транспортного средства | 1986 |
|
SU1526570A3 |
| Устройство для регулирования скорости движения транспортного средства | 1977 |
|
SU735454A1 |
| Устройство для поддержания безопасной дистанции между автомобилями в потоке | 1989 |
|
SU1699827A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТОРМОЖЕНИЯ ДВИГАТЕЛЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2147007C1 |
| Противоблокировочное устройство тормозной системы транспортного средства | 1979 |
|
SU1662884A1 |
| Устройство управления торможением транспортного средства | 1986 |
|
SU1452474A3 |
Изобретение относится к транспортному машиностроению, в частности к системам управления транспортными средствами. Устройство содержит блок измерения абсолютной скорости транспортного средства, связанный с дифференциатором и с блоком вычисления безопасной дистанции между транспортным средством и лидером, выход которого подключен к блоку сравнения, связанному с исполнительными органами тормозной системы и системы управления двигателем, локатор, блок определения установившегося замедления транспортного средства, детектор предельного замедления, блок определения запаздывания тормозов, запоминающее устройство, блок определения угла поворота управляемых колес, блок определения поправки к величине безопасной дистанции, датчики давления в приводе тормозов и начала торможения. Блок определения угла поворота управляемых колес связан с выходом блока сравнения и входом блока индикации и исполнительными органами рулевого управления. Технический результат направлен на расширение функциональных возможностей систем управления и повышение безопасности дорожного движения. 1 ил.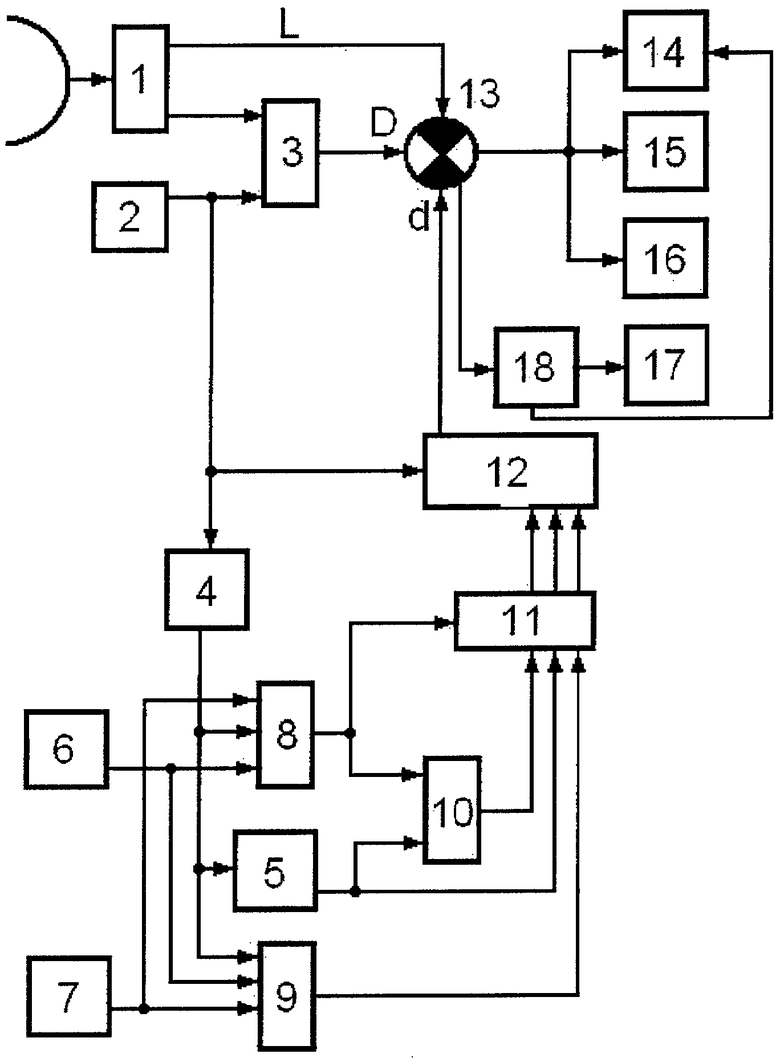
Автоматическое устройство для предотвращения столкновений транспортного средства, содержащее блок измерения абсолютной скорости транспортного средства, связанный с дифференциатором и с блоком вычисления безопасной дистанции между транспортным средством и лидером, выход которого подключен к блоку сравнения, связанному с исполнительными органами тормозной системы и системы управления двигателем, локатор, один из выходов которого подключен к упомянутому блоку сравнения, а другой - к упомянутому блоку вычисления безопасной дистанции, блок определения установившегося замедления транспортного средства, связанный с выходом дифференциатора, и детектором предельного замедления, выходы которых подключены к входам блока определения установившегося замедления лидера, блок определения запаздывания тормозов, запоминающее устройство, информационные входы которого* подключены к выходам указанных блоков определения установившегося замедления лидера, установившегося замедления транспортного средства и запаздывания тормозов, а разрешающий вход - к выходу детектора предельного замедления, блок определения поправки к величине безопасной дистанции, выход которого подключен к блоку сравнения, а входы связаны с указанными запоминающим устройством и блоком измерения абсолютной скорости, датчики давления в приводе тормозов и начала торможения, выходы которых совместно с выходом дифференциатора подключены к детектору предельного замедления и блоку определения запаздывания тормозов, отличающееся тем, что устройство снабжено блоком определения угла поворота управляемых колес, связанным с выходом блока сравнения и входом блока индикации и исполнительными органами рулевого управления.
| Устройство для автоматического торможения транспортного средства перед препятствием | 1978 |
|
SU779118A1 |
| Тормозной привод колес ведущего моста транспортного средства | 1989 |
|
SU1659259A1 |
| JP 2002264789 А, 18.09.2002 | |||
| DE 19836017 A1, 17.02.2000. | |||

