Заявляемые технические решения относятся к области радиолокации и могут быть использованы при осмотре зоны обзора в обзорных радиолокационных станциях (РЛС), снабженных антенной с электронным сканированием игольчатым лучом по углу места и круговым механическим вращением по азимуту.
Известен способ осмотра зоны обзора с помощью радиолокационной станции, снабженной антенной с электронным сканированием игольчатым лучом по углу места и одновременным круговым вращением по азимуту, включающий излучение и прием отраженных зондирующих сигналов в направлениях зоны обзора, образованных положениями луча антенны в виде совокупности угломестных столбцов, сопровождение объектов по данным, полученным на одном или нескольких предыдущих оборотах антенны (Теоретические основы радиолокации. Под ред. В.Е.Дулевича, М.: Сов. радио, 1978, с.182-183).
Введем понятие «виток обзора» или просто «виток». Виток обзора - область зоны обзора, осматриваемая за один оборот антенны.
Таким образом, поскольку известный способ обеспечивает осмотр зоны обзора за один оборот антенны, то он является одновитковым обзором.
Известна обзорная РЛС, реализующая одновитковый обзор, содержащая антенну, последовательно соединенные передатчик, антенный переключатель, приемник и оконечное устройство, а также синхронизатор, при этом сигнальный вход/выход антенны соединен со входом/выходом антенного переключателя, а координатный ее выход - со вторым входом оконечного устройства, первый и второй выходы синхронизатора соединены соответственно со входом передатчика и с третьим входом оконечного устройства (Теоретические основы радиолокации, под ред. В.Е.Дулевича, М.: Сов. радио, 1978, с.19, рис.1.5а).
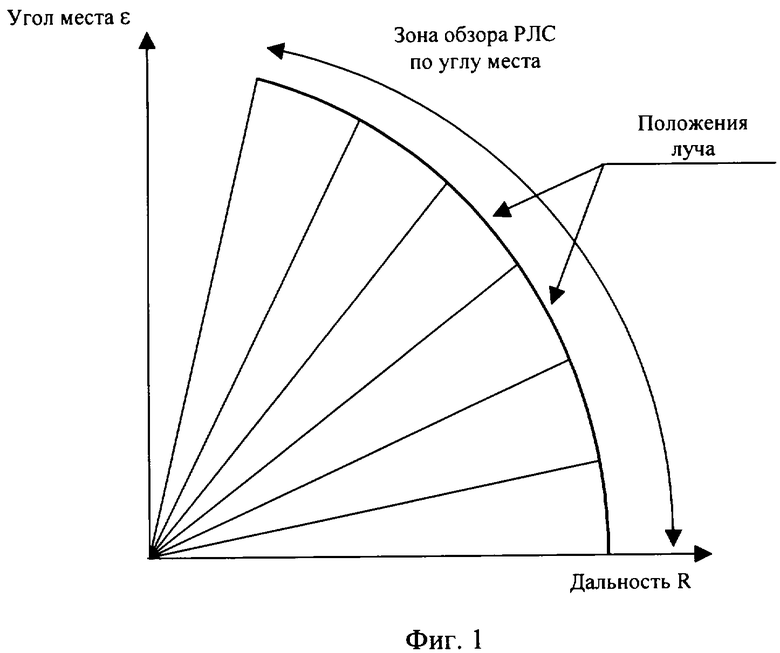
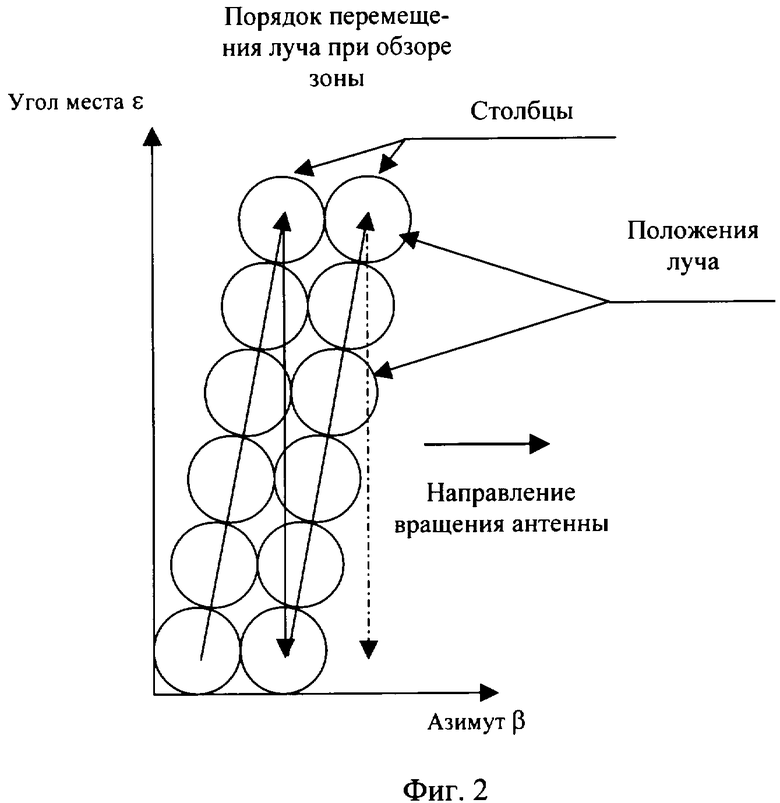
В известных технических решениях луч антенны осуществляет быстрое (электронное) сканирование в пределах зоны в плоскости угол места ε - дальность R (фиг.1) и относительно медленное (по мере вращения антенны) - по азимуту β (фиг.2).
Известные технические решения имеют следующие недостатки.
Современные средства нападения (объекты) обладают большими скоростными и маневренными возможностями, поэтому для их надежного сопровождения с помощью РЛС кругового обзора темп обращения к объекту (количество обращений в течение периода обзора) должен быть достаточно большим (не менее  ). Как правило, необходимо одновременно обеспечить и достаточно большую зону обзора по углу места (75-85°). Однако эти требования противоречивы. Известно (Теоретические основы радиолокации. Под ред. В.Е.Дулевича, М.: Сов. радио, 1978, с.181), что темп обращения к объекту и размеры зоны обзора связаны между собой. Так, при заданных размерах зоны обзора темп обращения к объекту не может быть произвольным: при неизменных длительностях зондирующих сигналов с увеличением темпа обращения к объекту зона обзора должна быть уменьшена. Это противоречие часто делает известный (одновитковый) способ обзора неприемлемым, поскольку он не может одновременно обеспечить требуемые темп обращения к объекту и размеры зоны обзора.
). Как правило, необходимо одновременно обеспечить и достаточно большую зону обзора по углу места (75-85°). Однако эти требования противоречивы. Известно (Теоретические основы радиолокации. Под ред. В.Е.Дулевича, М.: Сов. радио, 1978, с.181), что темп обращения к объекту и размеры зоны обзора связаны между собой. Так, при заданных размерах зоны обзора темп обращения к объекту не может быть произвольным: при неизменных длительностях зондирующих сигналов с увеличением темпа обращения к объекту зона обзора должна быть уменьшена. Это противоречие часто делает известный (одновитковый) способ обзора неприемлемым, поскольку он не может одновременно обеспечить требуемые темп обращения к объекту и размеры зоны обзора.
Наиболее близкий способ осмотра зоны обзора с помощью радиолокационной станции, снабженной антенной с электронным сканированием игольчатым лучом по углу места и одновременным круговым вращением по азимуту, включает излучение и прием отраженных зондирующих сигналов в направлениях зоны обзора, образованных положениями луча антенны в виде совокупности угломестных столбцов, сопровождение объектов по данным, полученным на одном или на нескольких предыдущих оборотах антенны, при этом зону обзора последовательно осматривают за n (где n>1) оборотов антенны (Теоретические основы радиолокации. Под ред. В.Е.Дулевича, М.: Сов. радио, 1978, рис.6.1 на с.185 и с.186).
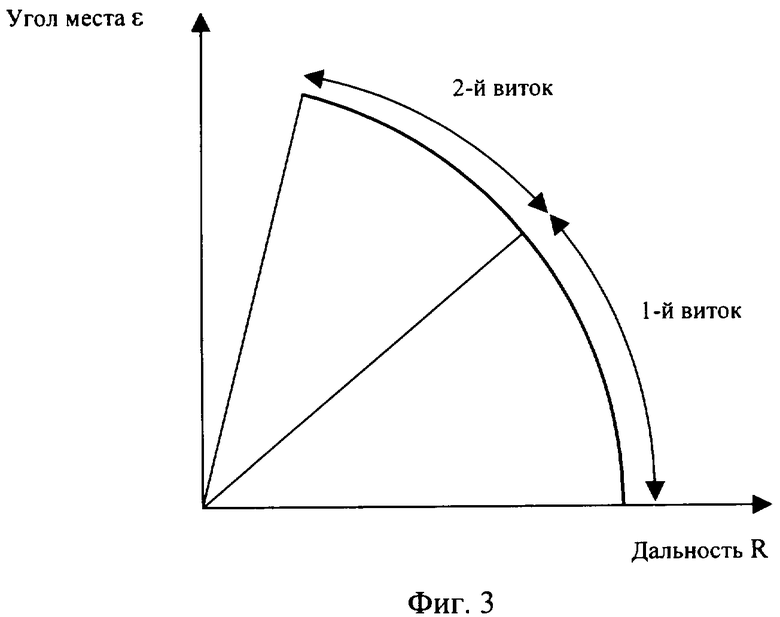
В наиболее близком способе на первом обороте антенны осуществляется (за счет быстрого (электронного) сканирования по углу места) осмотр нижней области зоны обзора, на следующем обороте антенны - следующей области зоны обзора, и т.д., на n-м обороте антенны - верхней области зоны обзора (фиг.3). Так как осмотр зоны обзора осуществляется за n оборотов антенны, то при той же скорости вращения антенны, что и в известном способе, темп обращения к объектам уменьшается в n раз. Для сохранения темпа скорость вращения антенны в наиболее близком способе увеличивают в n раз.
Таким образом, поскольку наиболее близкий способ обеспечивает осмотр зоны обзора за n витков, то он является n-витковым (или многовитковым) обзором.
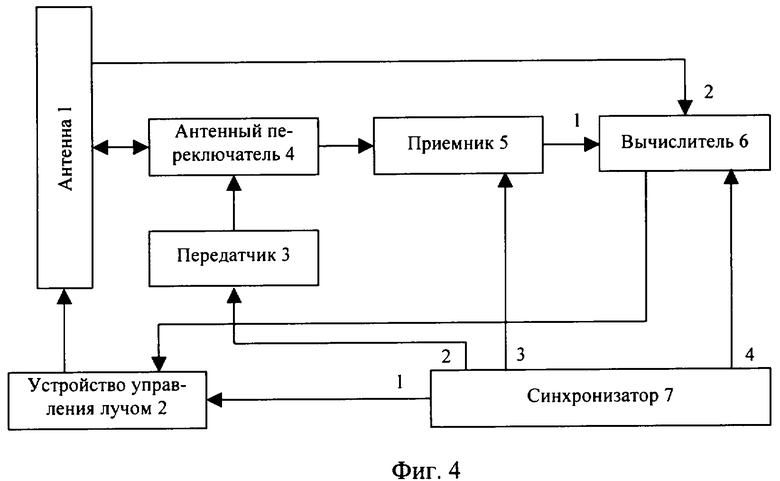
Устройством, наиболее близким к заявляемому, является обзорная РЛС (фиг.4), содержащая антенну 1, устройство управления лучом 2, выход которого соединен с антенной 1, последовательно соединенные передатчик 3, антенный переключатель 4, приемник 5 и вычислитель 6, а также синхронизатор 7, при этом сигнальный вход/выход антенны 1 соединен со входом/выходом антенного переключателя 4, а координатный ее выход - со вторым входом вычислителя 6, выход вычислителя 6 соединен со входом устройства управления лучом 2, четыре выхода синхронизатора 7 соединены соответственно с синхровходами устройства управления лучом 2, передатчика 3, приемника 5 и вычислителя 6 (Патент РФ №2292563).
Работа наиболее близкой к заявляемой РЛС происходит следующим образом (фиг.4). По команде от синхронизатора 7 в устройстве управления лучом 2 рассчитывается распределение состояний фазовращателей в полотне антенны 1 и луч антенны 1 устанавливается в заданном направлении зоны регулярного обзора. Сформированный в передатчике 3 высокочастотный зондирующий сигнал через антенный переключатель 4 подается в антенну и излучается. Отраженный сигнал, принимается антенной 1, через антенный переключатель 4 поступает в приемник 5, где преобразуется на видеочастоту, и затем подается в вычислитель 6, где осуществляются операции по обработке поступающей информации при сопровождении траектории объекта. Сопровождение объектов осуществляется в математических стробах (темп обращения к объекту в математическом стробе совпадает с темпом обращения к объекту при осмотре зоны обзора) известным способом (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, с.198-200).
В известных технических решениях при n-витковом обзоре осматривается зона обзора требуемой величины с требуемым темпом обращения к объекту. Однако платой за это является увеличение скорости вращения антенны по сравнению с рассмотренным известным (одновитковым) обзором в число раз, равное количеству оборотов антенны (количеству витков), требующихся для обзора всей зоны. Поскольку масса антенн современных РЛС кругового обзора достигает нескольких тонн, то значительное увеличение скорости вращения антенны в них не всегда достижимо.
Заявляемое изобретение направлено на устранение указанного недостатка.
Решаемой задачей (техническим результатом), таким образом, является повышение темпа обращения к сопровождаемому объекту при обеспечении требуемой зоны обзора по углу места без значительного увеличения скорости вращения антенны.
Указанный технический результат достигается тем, что в способе осмотра зоны обзора с помощью радиолокационной станции, снабженной антенной с электронным сканированием игольчатым лучом по углу места и одновременным круговым вращением по азимуту, включающем излучение и прием отраженных зондирующих сигналов в направлениях зоны обзора, образованных положениями луча антенны в виде совокупности угломестных столбцов, сопровождение объектов по данным, полученным на одном или на нескольких предыдущих оборотах антенны, при этом зону обзора последовательно осматривают за n (где n>1) оборотов антенны, согласно изобретению на каждом обороте антенны осматривают область зоны обзора с размерами по углу места, превышающими 1/n-ю часть зоны обзора, при этом после осмотра каждого угломестного столбца, принадлежащего осматриваемой в данный момент области зоны обзора, осматривают направления того же угломестного столбца, принадлежащие одной или нескольким другим областям зоны обзора, содержащие сопровождаемые объекты.
Указанный технический результат достигается тем, что выбор области зоны обзора производят из набора заранее рассчитанных видов областей обзора в зависимости от режима работы РЛС и положения объектов в зоне обзора.
Указанный технический результат достигается тем, что в радиолокационной станции, содержащей антенну, устройство управления лучом, передатчик, антенный переключатель, приемник, вычислитель, синхронизатор, при этом управляющий вход антенны соединен с выходом устройства управления лучом, сигнальный вход/выход антенны соединен со входом/выходом антенного переключателя, выход которого соединен со входом приемника, последовательно соединенного с вычислителем, координатный выход антенны соединен со вторым входом вычислителя, выход передатчика соединен со входом антенного переключателя, четыре выхода синхронизатора соединены с синхровходами соответственно устройства управления лучом, передатчика, приемника и вычислителя, согласно изобретению введен блок выбора области зоны обзора, вход которого соединен с выходом вычислителя, а выход - со входом устройства управления лучом, синхровход блока выбора области зоны обзора соединен с пятым выходом синхронизатора.
Суть заявляемых технических решений состоит в следующем.
Как уже отмечалось, в наиболее близком способе (n-витковом обзоре) зону обзора осматривают последовательно за n (где n>1) оборотов антенны (витков обзора) и на каждом витке осматривают 1/n-ю часть зоны обзора по углу места (фиг.3). Поскольку темп обращения к объекту на каждом витке при этом уменьшается в n раз относительно одновиткового обзора, то для его сохранения скорость вращения антенны увеличивают в n раз.
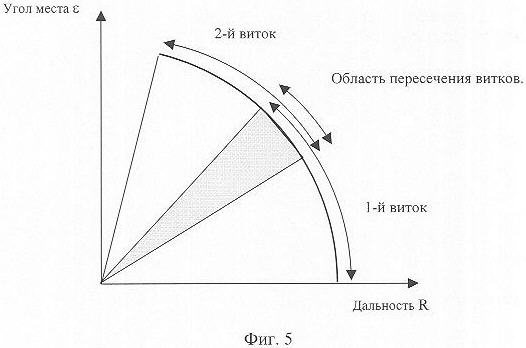
В изобретении соседние витки многовиткового обзора выполнены пересекающимися по углу места (фиг.5). Это достигается за счет того, что на каждом обороте антенны осматривают область зоны обзора, имеющую размеры по углу места, превышающие 1/n-ю часть зоны обзора. За счет этого появляется возможность после осмотра направлений столбца, принадлежащих осматриваемой в данный момент области зоны обзора, осмотреть еще и направления того же столбца вне этой области, т.е. принадлежащих одной или нескольким другим областям зоны обзора.
В заявляемых технических решениях направлениями, осматриваемыми вне осматриваемой в данный момент области зоны обзора, являются направления угломестного столбца, которые содержат сопровождаемые объекты (фиг.6). Осмотр этих направлений осуществляется за счет электронного сканирования по углу места (фиг.7).
Направления, содержащие сопровождаемые объекты, могут быть осмотрены не менее двух раз за время осмотра зоны обзора, т.е. темп обращения к объекту увеличивается не менее чем в два раза относительно наиболее близкого аналога.
Поскольку в заявляемых технических решениях темп обращения к объектам увеличивается при неизменной скорости вращения антенны, то для получения того же темпа обращения к объекту, что и в наиболее близком способе, требуется увеличение скорости вращения антенны в меньшей степени, чем количество витков при обзоре.
Сравним для примера три способа обзора пространства: способ в соответствии с аналогом, способ в соответствии с ближним аналогом и заявляемый способ.
Пусть в РЛС с одновитковым обзором зоны (способ в соответствии с аналогом) антенна вращается со скоростью один оборот за 12 с, обеспечивая при этом темп обращения к объекту, равный  .
.
Предположим, что в РЛС с одновитковым обзором оказалось невозможным обеспечить круговой обзор зоны с заданными размерами по углу места, и пришлось перейти к двухвитковому обзору зоны (способ в соответствии с наиболее близким аналогом). При этом осматривается вся требуемая зона, но для сохранения прежнего темпа обращения к объекту скорость вращения антенны пришлось увеличить до одного оборота за 6 с.
Пусть для увеличения темпа обращения к объекту при сохранении зоны обзора перешли (от способа в соответствии с наиболее близким аналогом) к заявляемому способу, увеличив осматриваемую на каждом витке область в 1.25 раза, что привело к увеличению периода обзора в витке до 7.5 с (вместо 6 с) и соответственно к уменьшению скорости вращения антенны с одного оборота за 6 с до одного оборота за 7.5 с. При этом на каждом витке появилось дополнительное время, равное 1.5 с, которое было использовано в направлениях, содержащих сопровождаемые объекты. Темп обращения к этим объектам увеличился за счет дополнительного обращения к ним до  .
.
Таким образом, в рассмотренном примере в РЛС, реализующей заявленный способ, удается получить темп обращения к объекту в 3.2 раза больший, чем в наиболее близком аналоге и в аналоге, при этом скорость вращения антенны относительно аналога возросла только в 1.6 раза, в то время как в наиболее близком аналоге - в два раза.
Для сокращения затрат временных и энергетических ресурсов РЛС целесообразно с увеличенным темпом осматривать не все направления, которые содержат сопровождаемые объекты, а только те направления, которые содержат объекты, удовлетворяющие определенному критерию, устанавливаемому исходя из особенностей движения сопровождаемого объекта. Такими критериями могут быть, например, степень маневрирования объекта, скорость объекта, время, за которое объект достигнет заданного района.
Поскольку в зависимости от режима работы РЛС (противосамолетная оборона, противоракетная оборона и др.) и распределения объектов в пространстве вид (конфигурация) зоны обзора изменяется, то в процессе работы РЛС целесообразно требуемые области зоны обзора не рассчитывать каждый раз, а выбирать из набора заранее рассчитанных областей зоны обзора.
Таким образом, достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - пример сечения зоны обзора плоскостью угол места ε - дальность R в известном способе осмотра зоны обзора.
Фиг.2 - пример сечения фрагмента зоны обзора плоскостью угол места ε - азимут β в известном способе осмотра зоны обзора.
Фиг.3 - пример сечения зоны обзора плоскостью угол места ε - дальность R в наиболее близком многовитковом (n=2) способе осмотра зоны обзора.
Фиг.4 - блок-схема наиболее близкой РЛС.
Фиг.5 - пример сечения зоны обзора плоскостью угол места ε - дальность R в заявляемом многовитковом (n=2) способе осмотра зоны обзора. Затемнена область пересечения областей обзора, т.е. область, осматриваемая дважды: при осмотре 1-й области зоны обзора и затем при осмотре 2-й области зоны обзора.
Фиг.6 - пример сечения зоны обзора плоскостью угол места ε - дальность R в заявляемом многовитковом (n=2) способе осмотра зоны обзора, в которой области пересечения витков установлены в направления, содержащие сопровождаемые объекты.
Фиг.7 - пример сечения фрагмента зоны обзора плоскостью угол места ε - азимут β в заявляемом многовитковом (n=2) способе осмотра зоны обзора. Цифрами показан порядок осмотра направлений областей зоны обзора. Пересекающиеся направления, содержащие сопровождаемые объекты (осматриваемые с двойным темпом) затемнены и обозначены двумя цифрами.
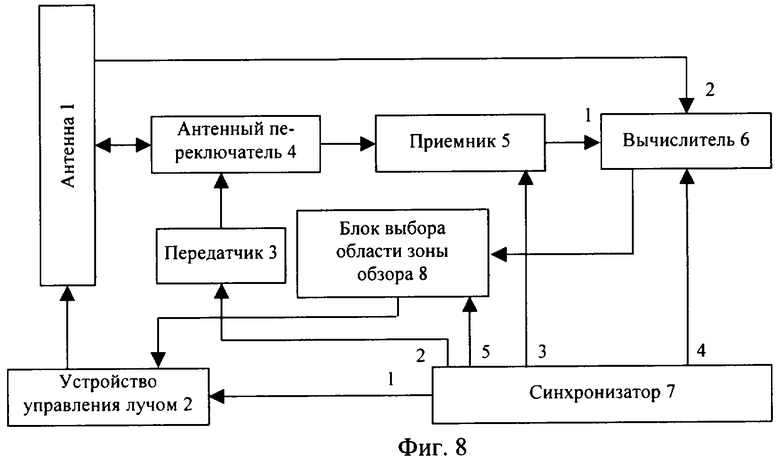
Фиг.8 - блок-схема заявляемой РЛС.
Заявляемый способ измерения угловых координат объекта реализуется с помощью радиолокационной станции (фиг.8), которая содержит антенну 1, устройство управления лучом 2, передатчик 3, антенный переключатель 4, приемник 5, вычислитель 6, синхронизатор 7, блок выбора области зоны обзора 8, при этом управляющий вход антенны 1 соединен с выходом устройства управления лучом 2, сигнальный вход/выход антенны 1 соединен со входом/выходом антенного переключателя 4, выход которого соединен с последовательно соединенными приемником 5, вычислителем 6 и блоком выбора области обзора 8, координатный выход антенны 1 соединен со вторым входом вычислителя 6, выход передатчика 3 соединен со входом антенного переключателя 4, выход блока выбора области обзора 8 соединен со входом устройства управления лучом 2, пять выходов синхронизатора 7 соединены с синхровходами соответственно устройства управления лучом 2, передатчика 3, приемника 5, вычислителя 6 и блока выбора области зоны обзора 8.
Заявляемая радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
Антенна 1 - ФАР с одномерным электронным сканированием игольчатым лучом по углу места и механическим вращением по азимуту (Справочник по радиолокации. Под ред. М.Сколника, т.2, - М.: Сов. радио, 1977, с.138).
Устройство управления лучом 2 - цифровой вычислитель, реализующий известный алгоритм расчета распределения состояний фазовращателей в полотне ФАР и формирования луча в заданном направлении по углу места (Справочник по радиолокации. Под ред. М.Сколника, т.2, - М.: Сов. радио, 1977, с.141-143).
Передатчик 3 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с.278).
Антенный переключатель 4 - балансный антенный переключатель на базе циркулятора (A.M.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.166-168).
Приемник 5 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с.343-344).
Вычислитель 6 - цифровой вычислитель. В вычислителе 6 реализуется известный алгоритм обнаружения и сопровождения траектории объекта (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио,1974,с.285-287).
Синхронизатор 7 - выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова, М.: Сов. радио, 1970, с.602-603).
Блок выбора области зоны обзора 8 - цифровой вычислитель. Реализует выбор области зоны обзора из набора заранее рассчитанных по данным о положении сопровождаемых целей в зоне обзора для следующего по порядку обзора. По данным о положении сопровождаемых объектов выбираются области зоны обзора, обеспечивающие положение области пересечения витков на последовательных оборотах антенны в направлениях, содержащих сопровождаемые объекты. Этим обеспечивается наибольший возможный при заданном количестве витков (n) темп обращения к сопровождаемым объектам.
Работа заявляемой РЛС происходит следующим образом (фиг.5).
В зависимости от режима работы РЛС (например, режим противосамолетной или режим противоракетной обороны, которые задаются перед началом работы РЛС на основании априорных данных или поступают, например, из командного пункта) в блоке выбора области зоны обзора 8 из набора заранее рассчитанных видов производится выбор области зоны обзора, которая должна осматриваться при первом осмотре зоны обзора. По команде от синхронизатора 7 в устройстве управления лучом 2 рассчитывается распределение состояний фазовращателей в полотне антенны 1 для каждого положения луча и луч антенны 1 последовательно устанавливается в направления зоны обзора. В каждом положении луча сформированный в передатчике 3 высокочастотный зондирующий сигнал через антенный переключатель 4 подается в антенну и излучается. Таким образом, осуществляется осмотр области зоны обзора. Отраженные сигналы принимаются антенной 1, через антенный переключатель 4 поступают в приемник 5, где преобразуются на видеочастоту, и затем подаются в вычислитель 6, где осуществляются операции по обработке поступающей информации при сопровождении объектов. Сопровождение объектов осуществляется известным способом (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, с.198-200). Данные о положении сопровождаемых объектов в зоне обзора поступают в блок выбора области зоны обзора 8, в котором осуществляется выбор области зоны обзора на следующий оборот антенны. Область зоны обзора выбирается такого вида, чтобы темп обращения к сопровождаемым объектам был наибольшим. Далее работа РЛС повторяется.
Таким образом, заявленные технические решения обеспечивают достижение технического результата - повышение темпа обращения к сопровождаемому объекту при обеспечении требуемой зоны обзора по углу места без значительного увеличения скорости вращения антенны.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2292563C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2347236C2 |
| СПОСОБ КОНТРОЛЯ ВОЗДУШНОГО ПРОСТРАНСТВА, ОБЛУЧАЕМОГО ВНЕШНИМИ ИСТОЧНИКАМИ ИЗЛУЧЕНИЯ, И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2285939C1 |
| СПОСОБ ЗАЩИТЫ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ В ВИДЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2403589C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2413239C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2304789C1 |
| Способ радиолокационного обзора | 2016 |
|
RU2626407C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА | 2006 |
|
RU2325669C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА, ОТДЕЛИВШЕГОСЯ ОТ ОБЪЕКТА-НОСИТЕЛЯ | 2007 |
|
RU2345383C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2297014C1 |

Заявляемые технические решения относятся к области радиолокации и могут быть использованы в обзорных радиолокационных станциях, снабженных антенной с электронным сканированием игольчатым лучом по углу места и круговым механическим вращением по азимуту. Достигаемым техническим результатом изобретения является повышение темпа обращения к сопровождаемому объекту при обеспечении требуемой зоны обзора по углу места без значительного увеличения скорости вращения антенны. Технический результат достигается за счет того, что зону обзора последовательно осматривают за n (где n>1) оборотов антенны, на каждом из которых осматривают область зоны обзора с размерами по углу места, превышающими 1/n часть зоны обзора, при этом после осмотра каждого угломестного столбца, принадлежащего осматриваемой в данный момент области зоны обзора, осматривают направления того же угломестного столбца, принадлежащие одной или нескольким другим областям зоны обзора, содержащие сопровождаемые объекты. 2 н. и 1 з.п. ф-лы, 8 ил.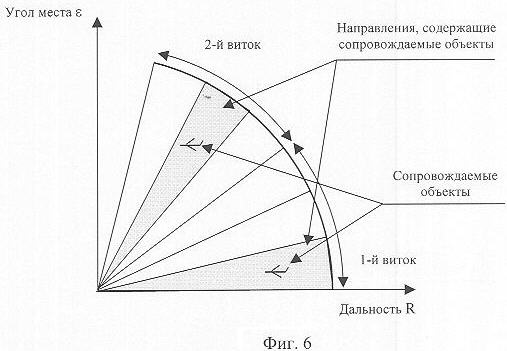
| Теоретические основы радиолокации | |||
| / Под ред | |||
| В.Е | |||
| ДУЛЕВИЧА, М.: Советское радио, 1978, с.19, рис.1.5а | |||
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА В РАДИОЛОКАЦИОННОЙ СИСТЕМЕ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2003 |
|
RU2237909C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ, КОМПЛЕКС РЛС ДЛЯ РЕАЛИЗАЦИИ СПОСОБА И РЛС ДЛЯ РЕАЛИЗАЦИИ КОМПЛЕКСА | 1998 |
|
RU2127436C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2297014C1 |
| US 6147638 А, 14.11.2000 | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПОДОГРЕВАНИЯ ВОЗДУХА ПРИ НАЛОЖЕНИИ ПНЕЙМОТОРАКСА | 1925 |
|
SU4401A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ СИЛЬФОНОВ | 0 |
|
SU323688A1 |

