Данное изобретение относится к ракетно-космической технике и может быть использовано для обеспечения соединения космических объектов, один из которых космический аппарат, оснащенный тросовой системой.
Под космическими объектами понимаются как космические аппараты искусственного изготовления, так и естественные космические тела.
В настоящее время в космической технике для соединения космических аппаратов используют стыковочные узлы жесткой конструкции, которыми оснащают каждый из стыкуемых аппаратов.
Так известен класс стыковочных узлов космических аппаратов жесткой конструкции. Все устройства требуют при операции причаливания выравнивания орбитальной скорости стыкуемых аппаратов.
Партнеры по программе Международной Космической Станции пришли к соглашению о введении нового стандарта системы стыковки. Соглашение позволяет создание целого ряда совместимых, но не обязательно идентичных, механизмов для стыковки космических аппаратов.
Международный стандарт систем стыковки (IDSS) описывает общий способ соединения космических аппаратов. Он построен на основе русской разработки APAS (Androgynous Peripheral Attachment System), используемой для «жесткой стыковки» и новых возможностей систем мягкого захвата от NASA и ESA.
В первой редакции содержится ориентировочное описание физических свойств и расчетных нагрузок стандартного интерфейса стыковки. Технические команды пяти партнеров по МКС продолжают работу над улучшениями и дополнениями к первоначальному стандарту.
В настоящее время также развиваются технологии использования тросовых (тезерных) систем в космическом пространстве.
Под тросовой системой понимают устройство, содержащее разворачиваемый трос, механизмы его разворачивания-сворачивания, систему контроля и управления состоянием устройства.
Аналогами являются способы использования устройств с тросовыми системами в различных видов применения в экспериментах в космосе.
В рамках американо-японской программы в 1980-85 гг. были осуществлены четыре запуска на высоту 328 км зондирующих ракет. В ходе полета полезный груз удалялся на электропроводном тросе на 400 м (серия экспериментов "CHARGE"). Два американских эксперимента "SEDS-1" и "SEDS-2" выполнены в 1993-94 гг. От последней ступени ракеты-носителя "Дельта-2" отводились полезные грузы на тросах длиной 20 км, выпускаемых с помощью катушек.
Канадские эксперименты "OEDIPUS-A" и "OEDIPUS-C" с тросами длиной 1 км проведены в 1989 и 1995 гг. В мае 1996 г. состоялся запуск двух американских аппаратов морской разведки с тросом длиной 4 км (эксперимент "TIPS").
Институтом космических исследований РАН предложен проект тросовой системы в форме тетраэдра для исследования электрических и магнитных полей в околоземном пространстве. В Московском техническом университете связи и информатики ведутся исследования систем с "бегущими" тросами. В Самарском авиационном институте и Центральном специальном конструкторском бюро (ЦСКБ) совместно с немецкими фирмами разработан проект эксперимента с привязной капсулой "Rapunzel" на спутнике "Фотон". В ЦНИИМаш по гранту NASA разработан проект двойной электродинамической тросовой системы ТЭДОС на корабле "Прогресс-М".
В РКК "Энергия" во взаимодействии с европейскими специалистами разрабатывается проект возвращения баллистических капсул и грузовых кораблей с пилотируемой станции при помощи длинных тросов. В 1994 г. в сотрудничестве с немецкой фирмой "Kayser Threde" был создан проект совместного эксперимента "Tpoc-Rapunzel", затем по заказу Европейского космического агентства (ESA) прорабатывался эксперимент тросового спуска капсулы "Радуга".
При успешном развитии работ по космическим тросовым системам предполагается создание в середине XXI в. долговременной пилотируемой орбитальной станции нового поколения. Согласно предварительным проработкам такая станция должна представлять собой сложную тросовую систему, состоящую из двух многоблочных станций, соединенных несколькими тросами, лифта (движущегося по тросам между станциями) и отводимых на тросах привязных модулей. Ракетно-космическая корпорация "Энергия" получила патент на орбитальную станцию подобного типа №2088491 «Тросовая орбитальная пилотируемая станция 21 века».
Известен патент «Способ стыковки космических аппаратов и устройство для его реализации» (RU 2430861). Изобретение относится к системам стыковки космических аппаратов (КА) и может быть использовано в различных ситуациях, включая нештатные. Способ заключается в следующем. Перед стыковкой с пассивного КА выпускают на тросе устройство зацепления, например надувную мишень с высокопрочной сеткой и световой сигнализацией. С активного КА при его сближении с пассивным КА запускают ракету, связанную с пассивным КА при помощи троса, снабженного энергопоглощающими элементами. Ракета имеет головку самонаведения и выдвижные элементы для зацепления с указанной сеткой
Наводят ракету на световые сигналы устройства зацепления и после ее попадания и зацепления с этим устройством регулируют натяжение троса, осуществляя его торможение при выпуске. При этом обеспечивают натяжение троса, не превышающее предельного значения. После выпуска троса на всю длину начинают раскрываться энергопоглощающие элементы, выполненные на тросе, например, в виде складок, зафиксированных разрушающим креплением. Трос продолжает удлиняться с натяжением, не превышающим предельного значения. При совместном движении КА в связке двигателями активного КА устраняют вращение связки вокруг ее центра масс и после прекращения расхождения КА подтягивают пассивный КА к активному с помощью троса и производят стыковку
Устройство, реализующее способ, управление движением КА в связке и (при необходимости) жесткую стыковку КА. Техническим результатом изобретений является увеличение максимально допустимой разницы относительных скоростей КА в начале стыковки и расширение множества ситуаций, допускающих стыковку КА.
В качестве прототипа выбран способ стыковки космических аппаратов и устройство для его реализации по патенту RU 2430861.
Недостатком прототипа является необходимость для реализации способа стыковки космических аппаратов с высокой разницей в относительных скоростях КА обязательного оснащения активного КА ракетой зацепления, а пассивного КА устройством ее захвата.
В ситуациях, требующих стыковки КА, возможны варианты отсутствия необходимого стыковочного устройства на пассивном КА или несовместимость или неисправность стыковочных узлов, прекращение функционирования по ряду причин, разрушение до состояния космического мусора и т.д. Данный способ нельзя также использовать для стыковки с космическими объектами естественного происхождения.
Таким образом недостатком прототипа является необходимость оснащения КА стыковочным устройством и необходимость согласования его со стыковочным устройством стыкуемого аппарата.
Целью изобретения является расширение возможности соединения КА в космическом пространстве с использованием гибких свойств, троса входящего в состав тросовой системы одного из КА.
Суть изобретения состоит в том, что по предлагаемому способу КА аппараты соединяют тросом, который с помощью перемещения активного КА в космическом пространстве формируют в узловое соединение, накладываемое на пассивный космический объект.
Более точно этот процесс определяет термин «соединение космических объектов», а не «стыковка», поскольку стыковочные устройства не требуются.
Для соединения космических объектов используют управляемое движение КА, оснащенного тросовой системой вокруг другого космического объекта таким образом, чтобы сформировать на тросе узловое соединение необходимой формы и обеспечивают завершающее затягивание этого узла на другом космическом объекте движением КА.
Соединение космических объектов способом, предлагаемым в изобретении, возможно использовать для решения ряда задач, например: для удаления неисправного КА из околоземного космического пространства, для его буксировки на другую орбиту, для проведения операции с КА по корректировке орбиты, для обеспечения захвата астероида для его перемещения или причаливания к нему, для создания комплекса связанных конструкций в космическом пространстве.
Способ соединения космических объектов в космическом пространстве, один из которых - космический аппарат, оснащенный тросовой системой, системой управления движением, двигателями ориентации и движения, системой контроля положения тросовой системы и соединяемого космического объекта, заключается в том, что с космического аппарата определяют координаты центра масс, параметры конфигурации и характеристики движения соединяемого космического объекта, вычисляют динамическую модель конфигурации троса, рассчитывают траекторию движения космического аппарата и осуществляют его движение с помощью двигателей ориентации и движения вокруг соединяемого космического объекта таким образом, чтобы сформировать форму троса в виде узла вокруг соединяемого космического объекта, например гафельного узла, и обеспечивают затягивание этого узла на соединяемом космическом объекте движением космического аппарата.
Способ соединения космических объектов в космическом пространстве заключается в том, что конец тросовой системы космического аппарата закрепляют на соединяемом космическом объекте, с космического аппарата определяют координаты центра масс, параметры конфигурации и характеристики движения соединяемого космического объекта, вычисляют динамическую модель конфигурации троса, рассчитывают траекторию движения космического аппарата и осуществляют его движение с помощью двигателей ориентации и движения вокруг соединяемого космического объекта таким образом, чтобы сформировать форму троса в виде узла вокруг соединяемого космического объекта, например гафельного узла, и обеспечивают затягивание этого узла на соединяемом космическом объекте движением космического аппарата.
Сущность изобретения иллюстрируется чертежами:
фиг. 1 - исходное позиционирование активного КА и пассивного космического объекта;
фиг. 2 - движение центра масс КА вокруг пассивного объекта по программе формирования узла;
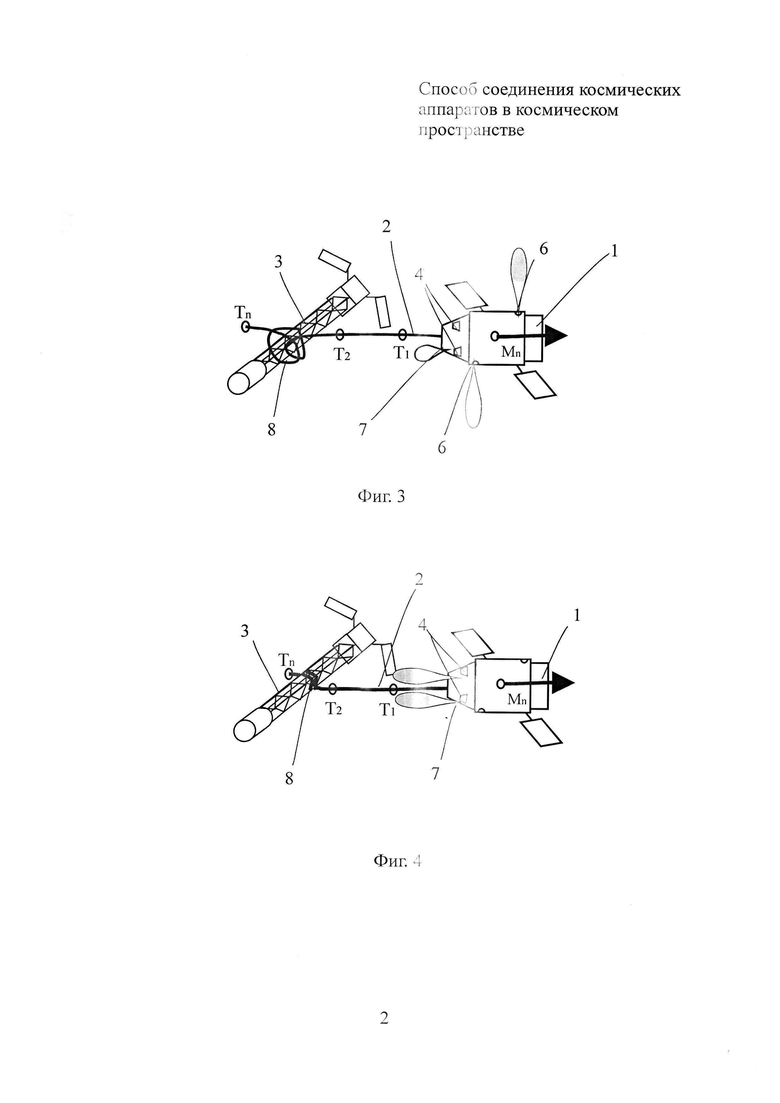
фиг. 3 - движение центра масс КА для затягивания узла;
фиг. 4 - движение для целевого использования соединения космических объектов;
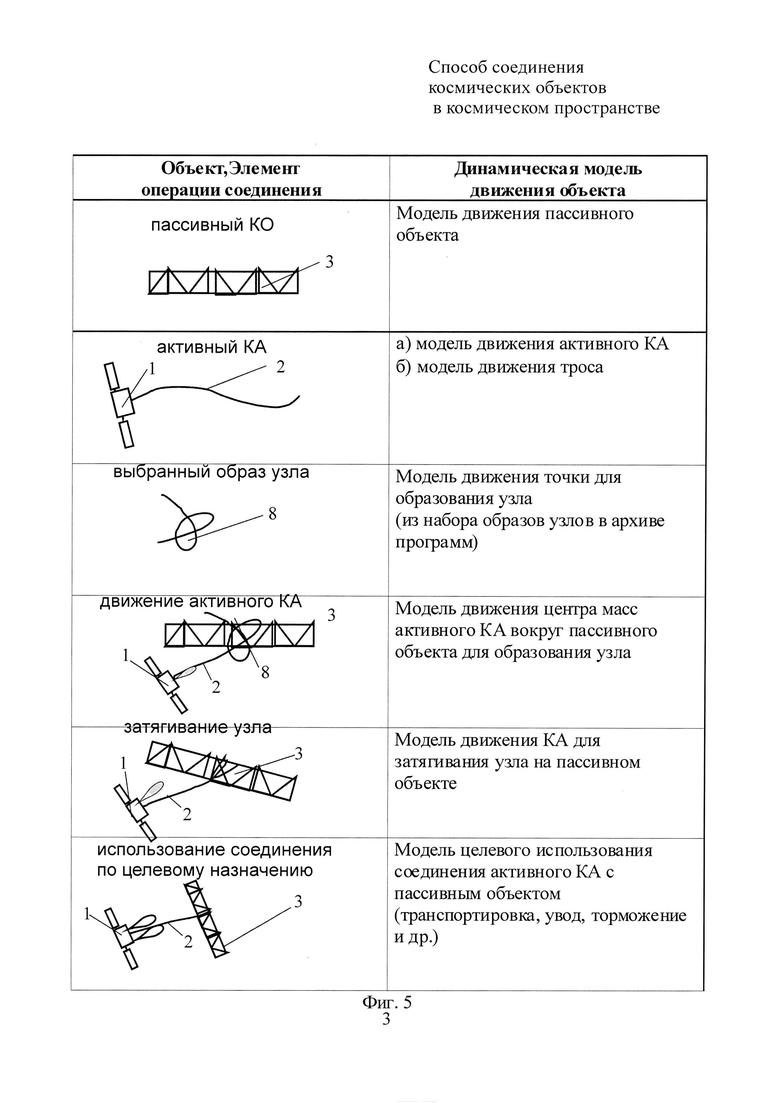
фиг. 5 - таблица необходимых динамических моделей для реализации операции соединения космических объектов
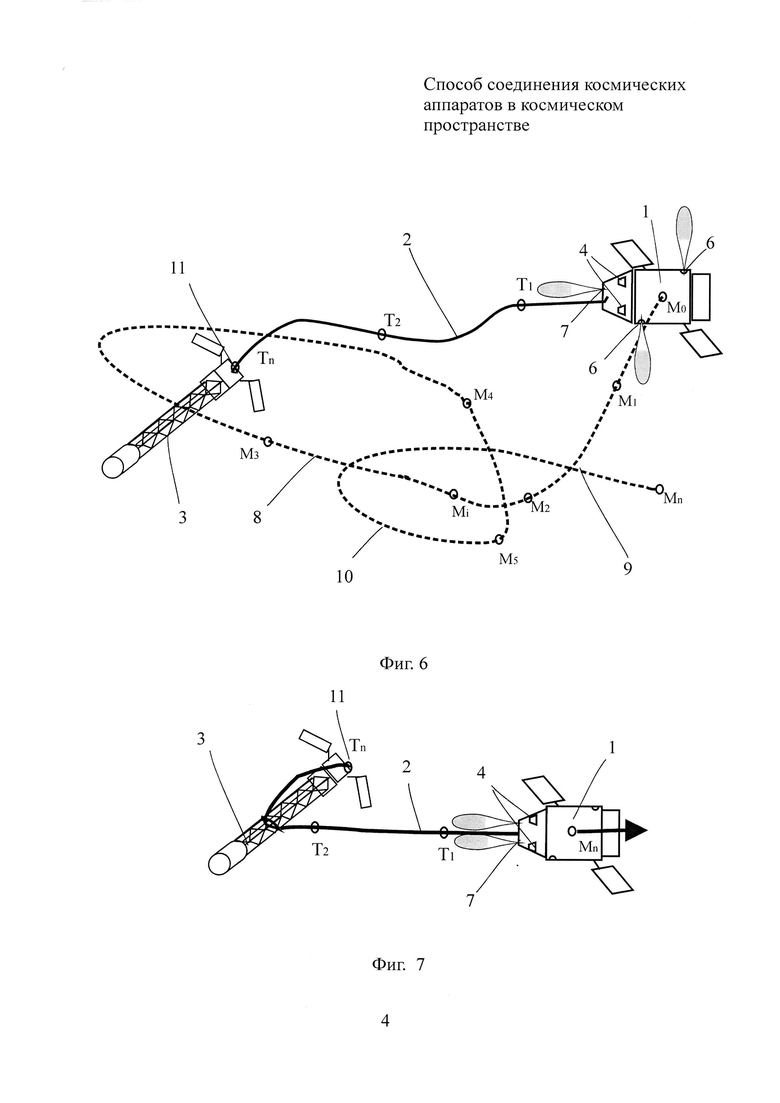
фиг. 6 - движение центра масс КА вокруг пассивного объекта по программе формирования узла при закреплении конца троса на пассивном космическом объекте;
фиг. 7 - движение центра масс КА для затягивания узла и последующего движения для целевого использования соединения космических объектов.
Способ соединения космических объектов в космическом пространстве осуществляется следующим образом.
Исходной позицией для применения способа является совместное движение космических объектов (фиг. 1) - КА 1 с развернутым тросом 2 его тросовой системы и другого соединяемого пассивного космического объекта 3 (например, также КА) в компланарной плоскости на расстоянии, доступном для выполнения операции соединения.
С космического аппарата 1 (фиг. 2) с развернутым тросом 2 осуществляют контроль за положением троса в пространстве, используя датчики видеонаблюдения 4 на КА или датчики положения 5, размещаемые на тросе. Для облегчения контроля за положением троса на тросе размещены маркировочные отметки в оптическом диапазоне или датчики взаимного смещения 5. Контрольные точки Ti (где i=1…n).
В результате рассчитывают и вводят в систему управления космического аппарата динамическую модель троса, описывающую его конфигурацию с координатами контрольных точек и первой и второй производными этих координат.
КА, используя двигатели ориентации 6 и маршевые двигатели 7, осуществляет движение центра масс M0 (координаты Mi, где i=1…n в моменты времени выполнения операции по формированию узла троса) таким образом, чтобы сформировать на пассивном космическом объекте узел 8 троса 2, включая выполнение оборотов троса вокруг пассивного космического объекта и проведение шлагов 9 в петли 10 троса 2 (на фиг. 2 траектория движения M0 показана упрощенно - один виток, один шлаг).
В систему управления КА введен образ относительного движения точки, при котором вокруг заданного геометрического объекта образуется узел заданной формы.
Комплекс обеспечивающих программ (архив) включает набор образов относительного движения точки, обеспечивающих получение узлов различных видов.
Вид узла выбирают исходя из конкретных условий космической обстановки в зависимости от цели создания и использования соединения космических объектов. (Л.Н. Скрягин. Морские узлы. М.: «Транспорт», 1994 г.).
При операции формирования узла на пассивном объекте при выборе материала покрытия (оплетки) троса учитывают особенности скольжения материала троса в вакууме космического пространства, так как коэффициент скольжения определяет качество затягивания узла.
Формы узлов, используемые в космическом пространстве, зависят от условий применения для получения необходимого результата и соответствуют классификации приведенной в справочниках по узлам (например, узлы затягивающие, незатягивающие, стопорящие, особые морские узлы, затягивающиеся петли и др.) (Л.Н. Скрягин. Морские узлы. М.: «Транспорт», 1994 г.). Например, описание гафельного узла - предназначен для быстрого прикрепления троса к предмету цилиндрической формы, соответствует применению этого узла в космическом пространстве для быстрого завязывания на космических объектах удлиненной формы.
Для получения гафельного узла необходимо сделать два оборота троса вокруг пассивного космического объекта и выполнить проведение шлага - проход через петлю троса (этап A и этап B на фиг. 2).
Особенностью формирования узлов на космическом объекте является необходимость проведения космического аппарата через петлю набрасываемого троса для формирования шлага, что накладывает требования по ограничению габаритов космического аппарата. При движении сквозь петлю троса для формирования шлагов может возникнуть опасность зацепления выступающих частей - солнечных батарей, антенн за трос. Решением, устраняющим этот риск, является оснащение космического аппарата механизмом временного сворачивания этих выступающих частей на момент выполнения операции соединения.
Фиг. 3. После формирования узла 8 троса 2 на соединяемом космическом объекте 3 движением космического аппарата 1 с помощью двигателей 6, 7 осуществляют затягивание полученного узла.
Движение осуществляют в режимах предварительного стягивания и окончательного затягивания узла.
Фиг. 4. Космический аппарат 1 ориентируют в пространстве, включают маршевую двигательную установку 7 и выполняет движение для целевого использования соединения космического аппарата и космического объекта.
После соединения космических объектов связку 1, 3 используют по назначению с возможным последующим отбрасыванием троса 2 или его части от активного КА при окончании штатной операции с пассивным космическим объектом.
Для реализации выбранного образа (модели) относительного движения для образования необходимого узла троса на пассивном объекте в программном обеспечении используют программы баллистических расчетов, которые включают вычисление динамических моделей движения в реальном масштабе времени, таких как (фиг. 5):
модель движения активного космического аппарата;
модель движения пассивного космического объекта;
модель движения троса;
модель результирующего движения с учетом ограничений;
движения активного космического аппарата по затягиванию полученного узла.
В практике расчетов сближающихся космических аппаратов применяются орбитальная и инерциальная относительные системы координат.
Направляющие орты орбитальной системы координат a
x, a
y, a
z записываются через вектор 

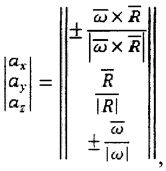
Верхний знак соответствует полетной системе, а нижний знак - кинетической.
В кинетической орбитальной системе координат
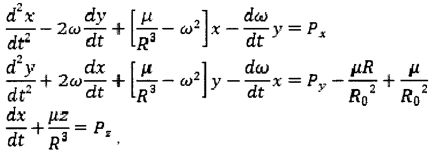
где R0 - расстояние до начала координат из центра притяжения;
R - расстояние от начала притяжения до движущейся точки.
В инерциальной относительной системе координат в случае, когда вектор R0 проходит через перигей опорной орбиты при t=0
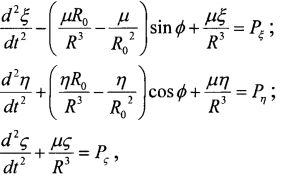
где ξ, µ, ς - координаты движущейся точки, совпадающие в момент прохождения с началом перигея и координатами орбитальной системы координат (x, y, z) соответственно;
Rξ, Rµ, Rς - компоненты возмущающего (управляющего) ускорения;
ϕ - угол между одной из осей, лежащих в плоскости опорной орбиты, и текущим радиусом-вектором 
(Основы теории полета космических аппаратов. Под ред. Нариманова Г.С., Тихонравова М.К. М.: Издательство «Машиностроение», 1972).
Траекторию движения центра масс космического аппарата для изменения конфигурации троса рассчитывают в реальном масштабе времени и реализуют с помощью двигателей космического аппарата таким образом, чтобы сформировался узел необходимой формы вокруг соединяемого космического объекта.
Проведение операции соединения по предлагаемому способу упрощается, если конец 11 троса 2 закрепляют на пассивном космическом объекте (фиг. 6). При этом значительно упрощается расчет динамических моделей движения элементов, участвующих в операции.
Способ закрепления конца троса определяется конкретными условиями решаемой задачи, для чего используют специальные конструкции, захват накидыванием петли троса, пристреливание, в том числе действия космонавта при пилотируемых полетах и т.д.
После формирования узла троса на соединяемом космическом объекте движением КА 1 (фиг. 7) осуществляют затягивание полученного узла.
Движение осуществляют в режимах предварительного стягивания и окончательного затягивания узла с последующим движением для целевого использования соединения космического аппарата и космического объекта.
Технический эффект от использования предлагаемого способа заключается в расширении возможностей применения тросовых систем и решении целого ряда новых задач.
Появляется возможность создания связок космических аппаратов, которые не имеют или не используют стыковочные узлы или имеют неприемлемые баллистические характеристики (например, вращение около центра масс).
При решении подобных задач может быть получен экономический эффект, заключающийся в выборе этого способа как менее финансовоемкого по сравнению с другими способами проведения операций по удалению космического мусора, при операциях с аварийными космическими аппаратами, при довыведении КА на орбиту или сведении с орбиты.
Предлагаемый способ упрощает требования к баллистическим условиям стыковки КА, устраняя необходимость выравнивания относительных скоростей стыкуемых объектов до нулевого значения.
Реализация предлагаемого изобретения обеспечивает возможность захвата объектов природного назначения для проведения операции перемещения астероидов, комет, метеороидов допустимых размеров и соответствующих по энергетике движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТЫКОВКИ КОСМИЧЕСКИХ АППАРАТОВ | 2012 |
|
RU2521082C2 |
| Способ синхронизации угловой скорости вращения активного космического аппарата с пассивным космическим аппаратом при выполнении операции обслуживания | 2017 |
|
RU2750077C2 |
| СПОСОБ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2531679C2 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ КОСМОСА ОТ ПАССИВНЫХ КА И ИХ ФРАГМЕНТОВ | 1998 |
|
RU2141436C1 |
| Способ управления сервисным космическим аппаратом при бесконтактном удалении фрагментов космического мусора | 2019 |
|
RU2720606C1 |
| Космическая инфраструктура для обслуживания космических объектов на геостационарной и более низких орбитах, а также способ обслуживания космических объектов посредством данной инфраструктуры | 2022 |
|
RU2776887C1 |
| Способ увода объектов крупногабаритного космического мусора и устройство для его реализации | 2021 |
|
RU2775092C1 |
| СПОСОБ СИНХРОНИЗАЦИИ УГЛОВЫХ СКОРОСТЕЙ ДВИЖЕНИЯ АКТИВНОГО КОСМИЧЕСКОГО АППАРАТА С ПАССИВНЫМ КОСМИЧЕСКИМ АППАРАТОМ | 2015 |
|
RU2603301C1 |
| СПОСОБ ВЫПОЛНЕНИЯ МАНЕВРА УКЛОНЕНИЯ КОСМИЧЕСКОГО АППАРАТА ОТ СТОЛКНОВЕНИЯ НА ОРБИТЕ С ДРУГИМИ ТЕЛАМИ | 2015 |
|
RU2586920C1 |
| Способ очистки орбит от объектов космического мусора | 2018 |
|
RU2676368C1 |
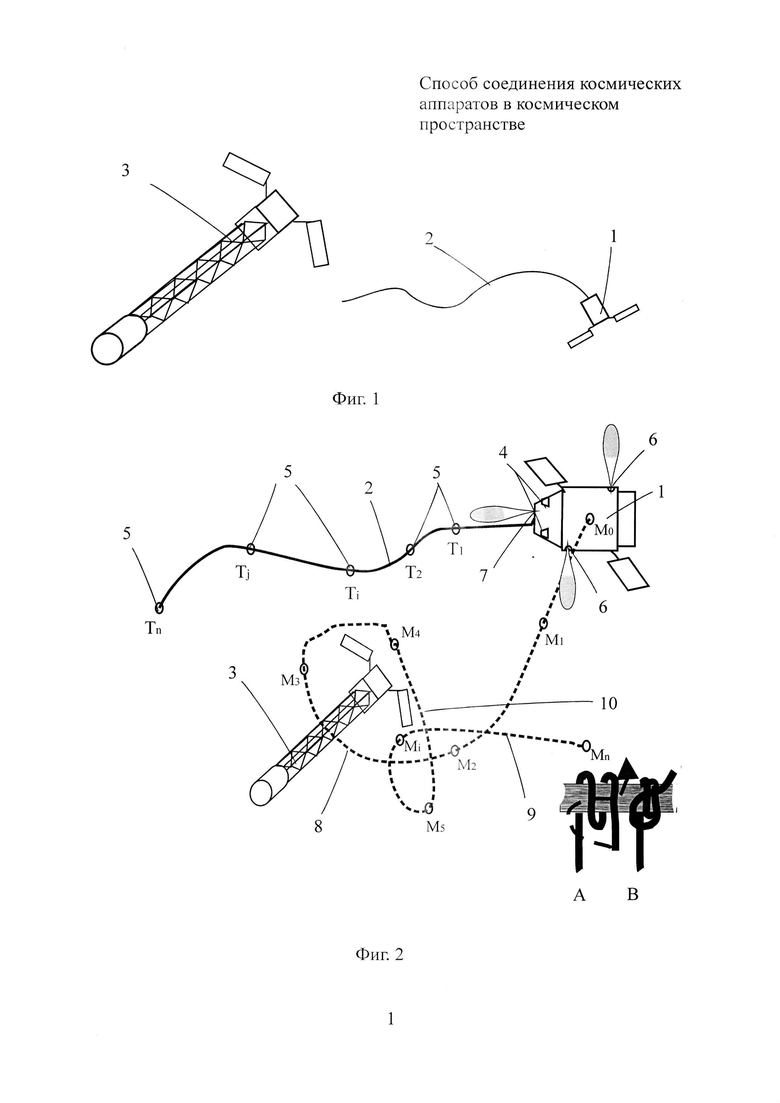
Изобретение относится к способам создания в космосе связки космического аппарата (КА) с космическим объектом (КО). Контролируют положение в пространстве троса (2), развернутого с борта КА (1), используя датчики видеонаблюдения (4) на КА и/или датчики положения (5) на тросе. Вводят в систему управления КА модель троса, описывающую его конфигурацию и её изменение по времени. Перемещают КА по траектории М0, М1, М2 … Мn его центра масс с помощью двигателей ориентации (6) и маршевых (7), формируя конфигурацию узла (8) вокруг КО (3). Конец троса (2) может быть закреплён на КО (3). Затягивание узла на КО производят дальнейшим движением КА, например, подобным буксировке. Технический результат изобретения заключается в расширении возможностей тросовых систем при решении традиционных и новых задач управления движением различных КО. 1 з.п. ф-лы, 7 ил.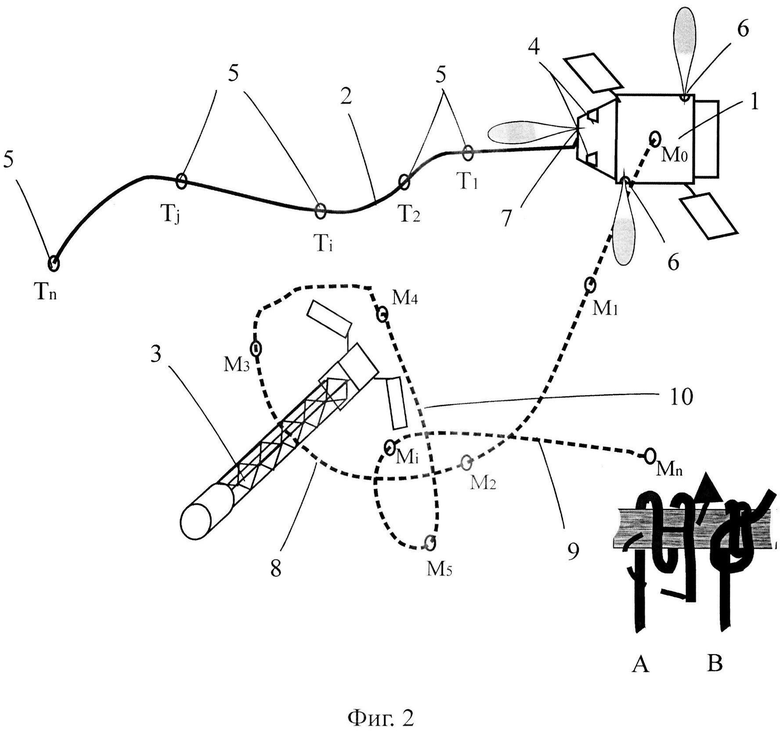
1. Способ соединения космических объектов в космическом пространстве, один из которых - космический аппарат, оснащенный тросовой системой, системой управления движением, двигателями ориентации и движения, системой контроля положения тросовой системы и соединяемого космического объекта, отличающийся тем, что с космического аппарата определяют координаты центра масс, параметры конфигурации и характеристики движения соединяемого космического объекта, вычисляют динамическую модель конфигурации троса, рассчитывают траекторию движения космического аппарата и осуществляют его движение с помощью двигателей ориентации и движения вокруг соединяемого космического объекта таким образом, чтобы сформировать форму троса в виде узла вокруг соединяемого космического объекта, например гафельного узла, и обеспечивают затягивание этого узла на соединяемом космическом объекте движением космического аппарата.
2. Способ соединения космических объектов в космическом пространстве по п.1, отличающийся тем, что конец тросовой системы космического аппарата закрепляют на соединяемом космическом объекте, с космического аппарата определяют координаты центра масс, параметры конфигурации и характеристики движения соединяемого космического объекта, вычисляют динамическую модель конфигурации троса, рассчитывают траекторию движения космического аппарата и осуществляют его движение с помощью двигателей ориентации и движения вокруг соединяемого космического объекта таким образом, чтобы сформировать форму троса в виде узла вокруг соединяемого космического объекта, например гафельного узла, и обеспечивают затягивание этого узла на соединяемом космическом объекте движением космического аппарата.
| RU 2012118248 A, 10.11.2013 | |||
| US 4750692 A, 14.06.1988 | |||
| Устройство для измерения среднего значения КПД энергоустановок | 1960 |
|
SU133096A1 |
| СПОСОБ СТЫКОВКИ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2430861C1 |
| US 3268091 A, 23.08.1966 | |||
| Итоги науки и техники | |||
| Сер | |||
| "Ракетостроение и космическая техника" | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| ВИНИТИ | |||
| Циркуль-угломер | 1920 |
|
SU1991A1 |

