Изобретение относится к механизмам реверсирования распределительных устройств и может найти применение в пневмо-гидравлических машинах возвратно-поступательного действия, например в гидравлических передачах с гидродвигателем или в мультипликаторах двойного действия с автоматическим управлением возвратно-поступательным действием поршня цилиндра.
Известны устройства, где реверс силового гидроцилиндра (гидродвигателя) осуществляется от механизма реверсирования:
1) Башта, Т.М. Гидравлические приводы летательных аппаратов. / Т.М. Башта. - М.: Машиностроение, - 1967. - С. 12-13; 312, 313; 324; 329-332;
2) Гамынин, Н.С. Основы следящего гидравлического привода. / Н.С. Гамынин. - М.: Оборонгиз, - 1962. - С. 116, 117; 162, 163;
3) Чупраков, Ю.И. Гидропривод и средства гидроавтоматики. / Ю.И. Чупраков. - М.: Машиностроение, - 1979. - С. 93-110;
4) Гамынин, Н.С. Динамика быстродействующего гидравлического привода. / Н.С. Гамынин, Ю.К. Жданов, А.Л. Климашин. - М.: Машиностроение, - 1979. - С. 7;
5) Пат. на изобретение 2211376 С1 Российская Федерация, МПК F04B 49/06. Электрогидравлический привод. / Чиркин Ф.В., Валиков П.И., Думский В.Л., Кокошкин Н.Н., Новоселов Б.В., Старцев В.Н.. Фомин Н.Н., Хорохорин Б.А., - 2003.
Указанные устройства обладают рядом недостатков:
- все они сложны - имеют многозвенное, многоступенчатое (каскадное) действие;
- механизмы с электромагнитным приводом начального каскада реверсирования требуют электропитания и программного обеспечения системы подачи рабочего тела (газа, жидкости) в привод возвратно-поступательного действия;
- механизмы реверсирования с кинематической обратной связью от рабочего цилиндра наряду со сложностью - инертны, вследствие чего увеличено время переходного процесса при перекладке дифференциального поршня, что для обеспечения стабильности характеристики выходного давления в системе требует повышенной производительности вспомогательных устройств (аккумулятора, компенсатора и пр.) с увеличением, соответственно, массы, что является определяющим значением при использовании устройств в летательных аппаратах.
Ближайшим техническим устройством, выбранным в качестве прототипа, является механизм реверсирования [6. Лаптев, Ю.Н. Гидросистемы высоких давлений. / Под ред. канд. техн. наук Ю.Н. Лаптева. - М.: Машиностроение, - 1973. - С. 35, 36, 50-54], состоящий из реверсивного золотника, механизма управления реверсированием и крана реверсирования.
Прототип и аналоги обладают одними и теми же недостатками: сложны технически, требуют дополнительных вспомогательных устройств (аккумулятор, кран реверсирования и пр.), инертны, ступенчатое управление по реверсу.
Техническим результатом изобретения является создание простого, надежного, прямого действия механизма реверсирования при минимальном времени срабатывания, исключающего недостатки аналогов и прототипа.
Указанный технический результат достигается применением в механизме реверсирования в качестве механизма управления реверсированием пружинного переключателя (с неустойчивым нейтральным положением), состоящего из вилки, задействованной кинематической связью с рабочим цилиндром, и качалки, задействованной кинематической связью с реверсивным золотником: вилка и качалка соединены между собой пружиной.
Качалка содержит упоры, с которыми в крайних положениях взаимодействует вилка, чем обеспечивается перекладка реверсивного золотника и безаварийная работа устройства в случае утраты упругой связи (действия пружины) между вилкой и качалкой.
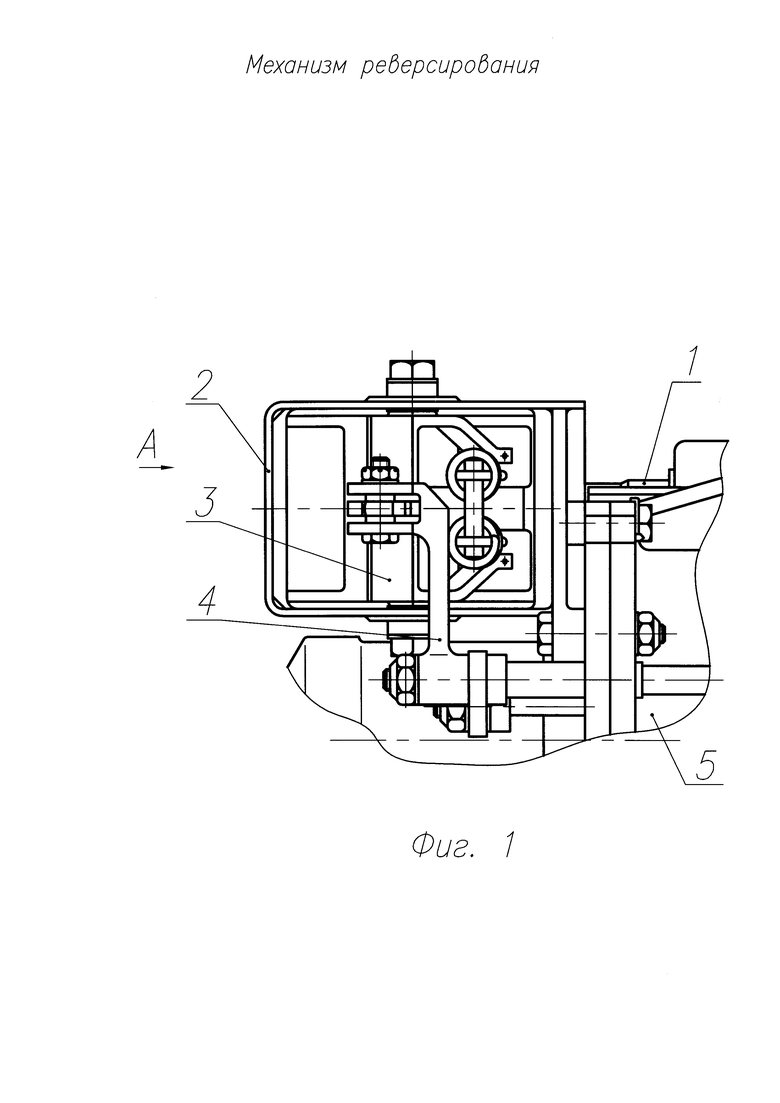
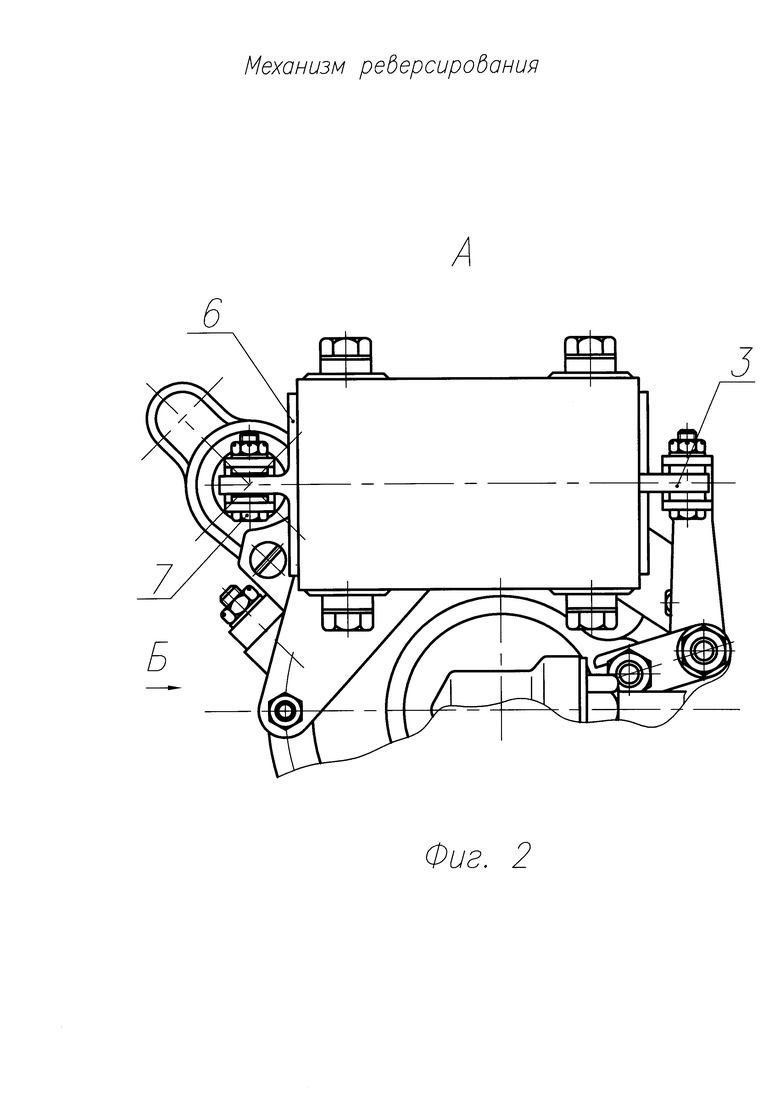
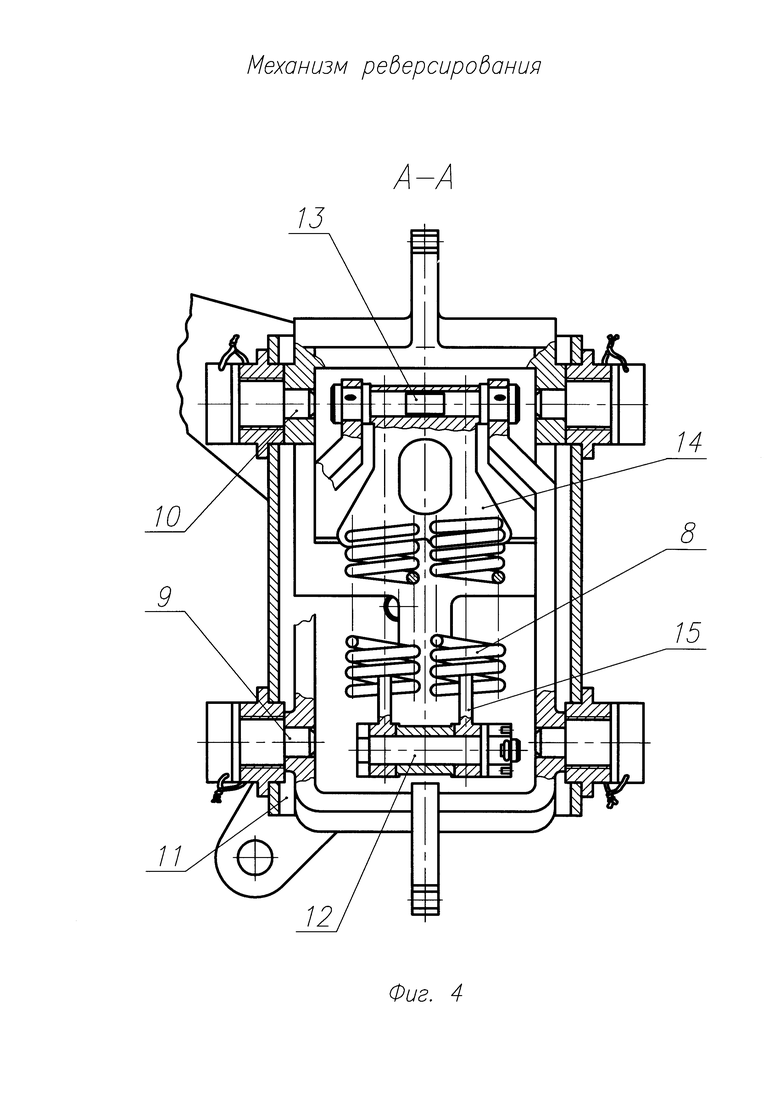
Изобретение поясняется чертежами, где на фиг. 1-4 изображен общий вид, виды А, Б и сечение В-В по отдельным элементам.
На фиг. 1-4 указаны позиции в следующем порядке:
1 - реверсивный золотник;
2 - механизм управления реверсированием;
3 - вилка;
4 - кинематическая связь;
5 - рабочий цилиндр;
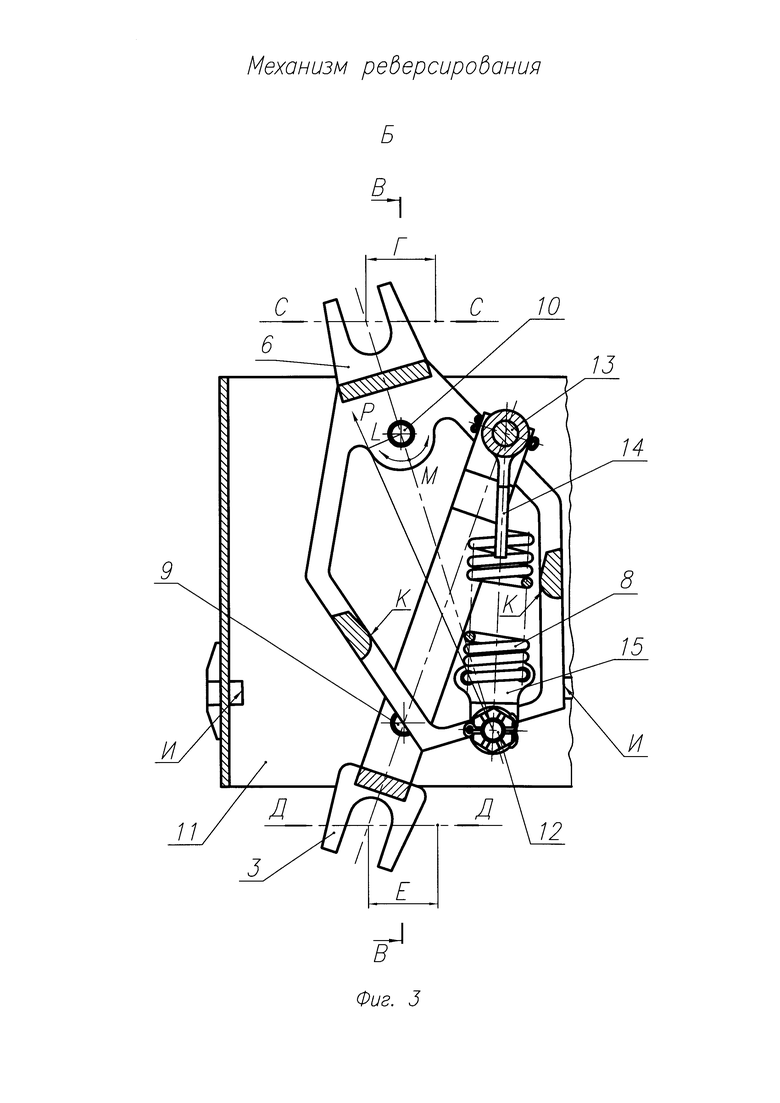
6 - качалка;
7 - кинематическая связь;
8 - пружина;
9 - ось; 10 - ось;
11 - корпус; 12 - ось; 13 - ось;
14 - шарнир-прицеп; 15 - шарнир-прицеп.
Механизм реверсирования, содержащий реверсивный золотник 1, и механизм управления реверсированием 2, состоящий из вилки 3, задействованной кинематической связью 4 с рабочим цилиндром 5, и качалки 6, задействованной кинематической связью 7 с реверсивным золотником 1; вилка 3 и качалка 6 соединены оппозитно между собой пружиной 8 и установлены соосно на осях 9, 10 в корпусе 11.
Пружина 8 закреплена на вилке 3 и качалке 6 на осях 12, 13 посредством шарнир-прицепов 14, 15. Качалка 6 содержит упоры «К», а корпус 11 - упоры «И».
Предлагаемый механизм реверсирования вследствие своей простоты и прямого действия обеспечивает высокую надежность управления реверсированием, сохраняя одновременно с тем резервирование по надежности в случае прекращения упругой связи (действия пружины) между вилкой и качалкой механизма управления реверсированием. Механизм реверсирования устойчив к ударным и вибрационным нагрузкам, что подтверждено в условиях производства и эксплуатации: ремонтопригоден с минимумом затрат.
Механизм реверсирования может быть выполнен с помощью стандартного оборудования и материалов отечественного производства. Таким образом, заявленное устройство соответствует критерию «промышленная применимость».
Принцип действия механизма реверсирования.
Обеспечение автоматической непрерывной работы механизма реверсирования подробно описано в устройстве с дифференциальным поршнем и реверсивным золотником [6. Лаптев, Ю.Н. Гидросистемы высоких давлений. / Под ред. канд. техн. наук Ю.Н. Лаптева. - М.: Машиностроение, - 1973. - С. 35, 36, 50-54] и не требуют пояснений.
Принцип действия отличительной его части - механизма управления реверсированием в автоматическом режиме возвратно-поступательного движения (насоса, двигателя) - следующий.
При движении вилки 3 в направлении «Д-Д» (ход Е) и вращении ее на оси 9 под воздействием кинематической связи 4 пружина 8, поворачиваясь на шарнир-прицепах 14 и 15 по осям 12, 13, перемещается с осью 13 до неустойчивого положения, расположенного на оси симметрии качалки 6, проходящей через оси 10 и 12, повышая при этом усилие «Р» до максимального. Далее вектор действия пружины 8 переходит из зоны одного устойчивого положения качалки 6 (по упорам «И») в другое, образуя на плече «L» от усилия «Р» момент крутящий (M=P×L), от которого, вследствие неустойчивого (нейтрального) положения, качалка 6 при мгновенном перемещении до другого упора «И» воздействует через кинематическую связь 7 на реверсивный золотник 1, обеспечивая его перемещение в направлении «С-С» (ход «Г») и подачу рабочего тела (газ, жидкость) в противоположную полость дифференциального поршня привода устройства (насоса, двигателя): процесс повторяется.
Таким образом, механизм реверсирования при прямой связи механизма управления реверсированием с реверсивным золотником и рабочим цилиндром надежно при минимальном времени действия, обеспечивает возвратно-поступательное движение привода устройства (насоса, двигателя).
| название | год | авторы | номер документа |
|---|---|---|---|
| Мультипликатор двойного действия | 2016 |
|
RU2645881C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРИВОДА УСТРОЙСТВА ПЕРЕДАЧИ ДАВЛЕНИЯ СРЕДЫ ОТ ОДНОЙ СИСТЕМЫ К ДРУГОЙ БЕЗ СОПРИКОСНОВЕНИЯ СРЕД | 2008 |
|
RU2357107C1 |
| Гидравлический станок-качалка | 1973 |
|
SU487998A1 |
| Гидромолот | 1978 |
|
SU781259A1 |
| Рекуперативный гидропривод лесовозного автомобиля с прицепом | 2019 |
|
RU2714041C1 |
| РЕГУЛЯТОР ОБОРОТОВ РЕВЕРСИВНОГО ВОЗДУШНОГО ВИНТА | 1990 |
|
RU1792074C |
| Гидропривод для возвратно-поступательного перемещения рабочего органа | 1982 |
|
SU1106926A1 |
| НАСОСНЫЙ ГИДРОПРИВОД | 1998 |
|
RU2148191C1 |
| Инерционный конвейер | 1987 |
|
SU1452756A1 |
| Гидропривод рабочего органа уборочной сельскохозяйственной машины | 1987 |
|
SU1516043A1 |
Изобретение относится к механизмам реверсирования распределительных устройств, в частности к механизму реверсирования мультипликатора с автоматическим управлением возвратно-поступательным движением рабочего цилиндра. Механизм реверсирования мультипликатора содержит реверсивный золотник и механизм управления реверсированием. Механизм управления реверсированием выполнен в виде пружинного переключателя, состоящего из вилки и качалки, соосно установленных в корпусе и соединенных оппозитно между собой пружиной. Вилка кинематически связана с рабочим цилиндром, а качалка - с реверсивным золотником. Качалка и корпус снабжены упорами для контактного взаимодействия вилки с качалкой при перемещении вилки из одного положения в другое. Использование изобретения обеспечивает минимальное время срабатывания механизма реверсирования. 4 ил.
Механизм реверсирования мультипликатора с автоматическим управлением возвратно-поступательным движением рабочего цилиндра, содержащий реверсивный золотник и механизм управления реверсированием, отличающийся тем, что механизм управления реверсированием выполнен в виде пружинного переключателя, состоящего из вилки и качалки, соосно установленных в корпусе и соединенных оппозитно между собой пружиной, при этом вилка кинематически связана с рабочим цилиндром, а качалка - с реверсивным золотником, причем качалка и корпус снабжены упорами для контактного взаимодействия вилки с качалкой при перемещении вилки из одного положения в другое.
| ЛАПТЕВ Ю.А | |||
| Гидросистемы высоких давлений | |||
| Москва | |||
| Машиностроение, 1973, с | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
| ГИДРАВЛИЧЕСКАЯ ЦИРКУЛЯЦИОННАЯ СИСТЕМА ДВОЙНОГО ТОРЦОВОГО УПЛОТНЕНИЯ | 0 |
|
SU261055A1 |
| Механизм управления реверсированием вращательного движения | 1984 |
|
SU1227873A1 |
| Устройство для переменно-вращательного движения | 1938 |
|
SU55291A1 |
| Гидравлический двигатель | 1988 |
|
SU1551253A3 |

