Изобретение относится к устройствам для транспортирования штучных; грузов и может найти применение как средство межоперационного перемещения изделий на тележках-спутниках в гибких транспортно-технологических системах.
Целью изобретения является повышение надежности работы конвейера и точности останова груза.
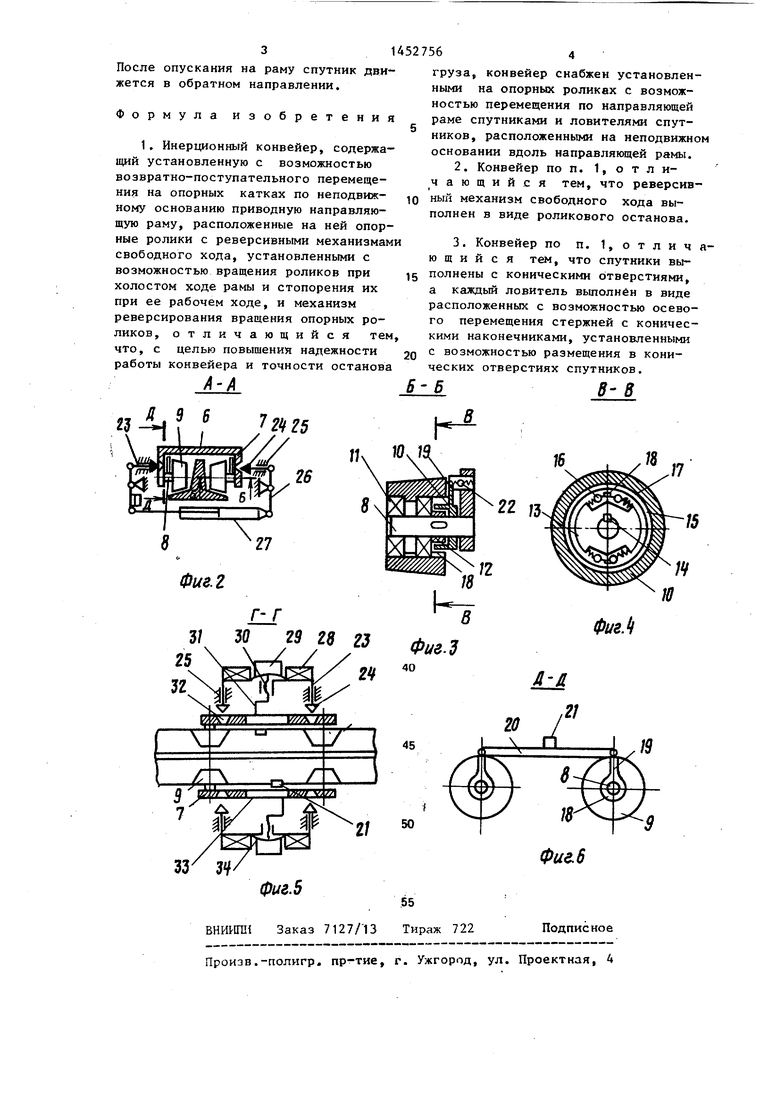
На фиг. 1 изображен предлагаемый конвейер, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4- jj сечение В-В на фиг. 3; на фиг. 5- сечение Г-Г на фиг. 1; на фиг. 6 - сечение Д-Д на фиг. 2. Инерционный конвейер состоит из
10
сердечников, конические отверстия 32 в боковинах платформы спутника, прорези 33 и пружины 34 возврата толкателя .
Инерционный конвейер работает следующим образом.
Спутники 2 с закрепленными на них грузами устанавливаются на приводную направлякядую раму 1, которая после включения привода 4 начинает совершать возвратно-поступательные перем мещения, опираясь на неподвижное основание через опорные катки 3. Для перемещения спутников в нужном нап- равлении вилки 18 с рычагами 19 через тяги 20 разворачиваются в нужном направлении. При этом вилки отжимают один из пары роликов 16 роликовых
установленной с возможностью возврат-JQ остановов, размещенных в каждом 4U ОПОРНОМ ролике. Опорные ролики
но-поступательного перемещения по неподвижному основанию приводной направляющей рамы 1, установленных на опорных роликах с возможностью переопорном ролике. Опорные ролики получают возможность вращения под действием возникающей силы инерции в одном направлении и стопорятся в
ОПОРНЫХ роликал I. DVJ-3ииячп - -«IJI iiv-t - . .
ь щения по направляющей раме спутни- 25 ДРУгом. Спутники получают возможность v- « „ „„„глочотоиысг п HV4cHnM напоавлении. При
30
35
, . .
ков 2, опорных катков 3 направляющей рамы привода 4, ловителей 5 спутников, расположенных на неподвижном основании вдоль направляющей рамы, платформ 6 спутников с боковинами 7 и осями 8 опорных роликов 9 с корпусами 10 подшипников 11 качения и с реверсивными механизмами свободного хода, выполненными в виде роликовых остановов 12, включающих ступицы 13, закрепленные через шпонки 14 на осях опорных роликов, внешние обоймы 15, запрессованные в корпусах опорньпс роликов, ролики 16 роликовых остановов с пружинами 17, установленными Q с возможностью вращения при холостом ходе рамы и стопорения их при ее рабочем ходе, механизмов реверсирования вращения опорных роликов, включающих вилки 18 управления, остановами с рычагами 19, тягами 20, упорами 21 и фиксаторами 22, приводов ловителей, выполненных в виде распо- ложенньк с возможностью осевого перемещения стержней 23 с коническими наконечниками 24, направляющих 25 и двухплечных рычагов 26, соединенных с цилиндрами 27 и приводов механизмов реверсирования вращения опорных роликов, включающих катушки 28 электромагнитов, сердечники 29, установленные в винтовых направляющих 30, толкатели 31, эксцентрично установленные относительно оси поворота
45
50
55
перемещения в нужном направлении. При необходимости остановки спутника с грузом на рабочем месте срабатывает цилиндр 27 привода ловителей 5, который разворачивает двухплечные рычаги 26 и шарнирно соединенные с ними стержни 23 с коническими наконечниками 24, которые,сближаясь, входят в конические отверстия 32 боковин 7 платформы 6 спутника и останавливают его. Благодаря тому, что оси конических наконечников стержней и оси конических отверстий боковин смещены по вертикали на 1,0-1,5 мм спутник вместе с грузом приподнимается над поверхностью рамы и в дальнейшем в процессе обработки груза с ней не контактирует. После обработки цилиндр возвращается в исходное положение, наконечники выходят из конических отверстий, спутник опускается на раму и продолжает движение.
Реверсирование направления движения спутника осуществляется при его остановке ловителями 5. Для этого включаются катушки 28 электромагнитов. Сердечник 29, смещаясь в винтовых направляющих 30, поворачивает толкатель 31, который воздействуя на упор 21 через тягу 20, разворачивает рычаги 19 с вилками 18 привода механизма реверсирования вращения опорных роликов. Фиксатор 22 удерживает рычаги в нужном положении
сердечников, конические отверстия 32 в боковинах платформы спутника, прорези 33 и пружины 34 возврата толкателя .
Инерционный конвейер работает следующим образом.
Спутники 2 с закрепленными на них грузами устанавливаются на приводную направлякядую раму 1, которая после включения привода 4 начинает совершать возвратно-поступательные перем мещения, опираясь на неподвижное основание через опорные катки 3. Для перемещения спутников в нужном нап- равлении вилки 18 с рычагами 19 через тяги 20 разворачиваются в нужном направлении. При этом вилки отжимают один из пары роликов 16 роликовых
остановов, размещенных в каждом ОПОРНОМ ролике. Опорные ролики
опорном ролике. Опорные ролики получают возможность вращения под действием возникающей силы инерции в одном направлении и стопорятся в
. .
5 ДРУгом. Спутники получают возможность „„глочотоиысг п HV4cHnM напоавлении. При
0
35
Q
45
50
55
перемещения в нужном направлении. При необходимости остановки спутника с грузом на рабочем месте срабатывает цилиндр 27 привода ловителей 5, который разворачивает двухплечные рычаги 26 и шарнирно соединенные с ними стержни 23 с коническими наконечниками 24, которые,сближаясь, входят в конические отверстия 32 боковин 7 платформы 6 спутника и останавливают его. Благодаря тому, что оси конических наконечников стержней и оси конических отверстий боковин смещены по вертикали на 1,0-1,5 мм спутник вместе с грузом приподнимается над поверхностью рамы и в дальнейшем в процессе обработки груза с ней не контактирует. После обработки цилиндр возвращается в исходное положение, наконечники выходят из конических отверстий, спутник опускается на раму и продолжает движение.
Реверсирование направления движения спутника осуществляется при его остановке ловителями 5. Для этого включаются катушки 28 электромагнитов. Сердечник 29, смещаясь в винтовых направляющих 30, поворачивает толкатель 31, который воздействуя на упор 21 через тягу 20, разворачивает рычаги 19 с вилками 18 привода механизма реверсирования вращения опорных роликов. Фиксатор 22 удерживает рычаги в нужном положении.
Я. 9 6
7f«f5
, j2 2
vy
1///Лу//лС.
а X
/гл л
W 3t
фие.5
Фиг.
й-й
45
Ix/
50
Фиг. 6
55
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоведущий штанговый конвейер | 2002 |
|
RU2223904C1 |
| ИНЕРЦИОННЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 2014 |
|
RU2558536C1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
| Инерционный конвейер для штучныхгРузОВ | 1979 |
|
SU818988A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Путевой упор | 1983 |
|
SU1093591A1 |
| Устройство для загрузки транспортных средств | 1986 |
|
SU1386541A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| Устройство для возведения рамной крепи | 1985 |
|
SU1273577A1 |
| Шаговый конвейер | 1982 |
|
SU1062141A1 |
Изобретение относится к устройствам для транспортирования штучных грузов и,может найти применение как средство межоперационного перемещения изделий на тележках-спутниках в гибких транспортно-технологических системах. Цель изобретения - повышение надежности работы конвейера и точности останова груза. Инерционный конвейер состоит из приводной направляющей рамы (HP) 1, имеющей возможность возвратно-поступательного перемещения по неподвижному основа- | нию спутников 2, опорных катков 3 и привода 4. На неподвижном основании располагаются ловители 5 спутников 2. Опорные ролики спутников имеют реверсивный механизм свободного хода, выполненный в виде роликового останова. Боковины спутников 2 имеют конические отверстия, а подвижные стержни ловителей 5 - конические наконечники. При возвратно- поступательном перемещении HP 1 реверсивный механизм свободного хода спутника 2 устанавливается в положение, определяющее направление движения спутника 2, и спутник 2 с грузом начинает шаговое перемещение по HP 1. Останов или реверсирование спутников 2 осуществляется на рабочих местах повредством ловителей 5. Наконечники входят в конические отверстия и благодаря смещению уровней осей спутники 2 приподнимаются над HP 1. 2 з.п. ф-лы, 6 ил. сл 01 to ел О5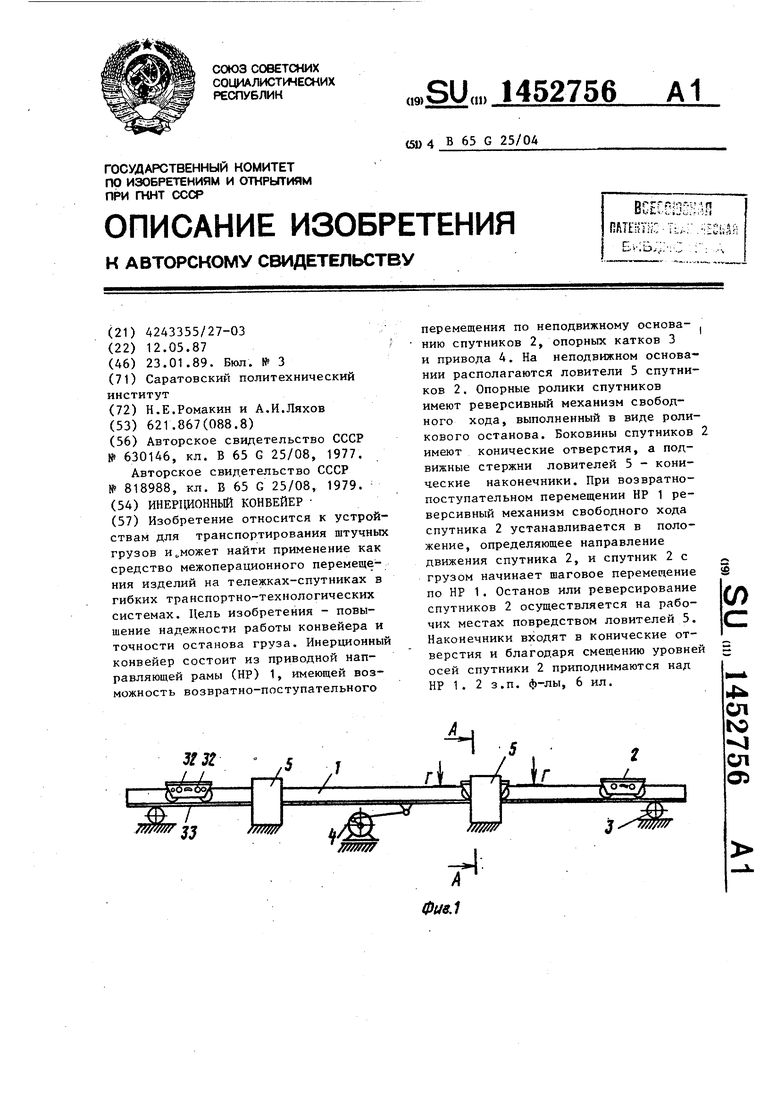
ВНИНГШ Заказ 7127/13 Тираж 722
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
Подписное
| Инерционный конвейер для штучных грузов | 1977 |
|
SU630146A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Инерционный конвейер для штучныхгРузОВ | 1979 |
|
SU818988A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
