Изобретение относится к авиации, в частности к многопозиционным системам посадки воздушных судов (ВС), в общем случае - летательных аппаратов (ЛА), и применимо для космических аппаратов.
Известны многопозиционные системы навигации (МПСН), в том числе используемые при посадке ЛА многопозиционные системы посадки (МПСП). Такие системы содержат наземный запросчик (ЗП), ряд (обычно 3-4) наземных приемников (НП), центральную станцию с наземной ЭВМ, при этом в центральную станцию (ЦС) поступают сигналы от наземных приемников, имеющих высокоточную геодезическую привязку, а в ЭВМ происходит определение горизонтальных координат ЛА. Кроме того, в таких системах имеется двухсторонняя радиолиния связи ЦС-ЛА, по которой в ЦС поступают с высотомера ЛА значения высоты нахождения ЛА. Наземная аппаратура (запросчик и приемники) синхронизированы единой системой времени. Таким образом, в наземной ЭВМ возможно сформировать координаты ЛА, например, в декартовой системе координат, и отклонение его от расчетной глиссады. Координаты ЛА и отклонения от глиссады передаются с ЦС на ЛА через радиолинию связи ЦС-ЛА, выводятся на индикацию пилоту и передаются в систему автоматического управления на ЛА.
Данные системы [1-3] имеют недостаточную надежность и точность определения местоположения ЛА при посадке.
В [1] обращено внимание на необходимость более точного определения высоты полета ЛА, использование наиболее точных лазерного и/или радиовысотомеров. При этом бортовой измеритель высоты соединен по выходу с бортовым ответчиком, и значение высоты передается в ЦС вместе с сигналами наземных приемников. Изобретение [1] является прототипом заявленного изобретения.
Рассмотренная система-прототип уступает по точности глобальным навигационным спутниковым системам (ГНСС).
ГНСС при заходе на посадку и посадке приобретает дополнительную надежность и точность при использовании наземных псевдоспутников (ПС), которые компенсируют пропадание сигналов навигационных спутников при выполнении предпосадочных маневров (разворотов с большим креном), а также при изменении углов крена и тангажа при уходе ЛА на второй круг. В этих случаях ЛА оснащается кроме обычной верхней приемной антенны, дополнительной нижней антенной, обращенной к упомянутым псевдоспутникам, расположенным на земле. Кроме того, рассматриваемая система обладает высокой точностью определения высоты ЛА благодаря тому, что при посадке потери сигналов псевдоспутников весьма малы за счет близкого расстояния до ЛА, даже в случае малой мощности излучения ПС. Такие системы были предложены авторами [4] еще в 2002 г.
Далее система с ПС была усовершенствована по точности в [5].
Известны комплексные системы навигации, основанные на взаимодействии спутниковой навигационной системы и наземных станций (радиомаяков), что увеличивает надежность и точность определения координат ЛА при навигации. Однако недостатки таких систем связаны с недостаточной точностью в районе посадки и снижением общей точности при уменьшении рабочего созвездия навигационных спутников.
В последнее время широко распространяются системы автоматического зависимого наблюдения (АЗН, АЗН-В), например, [6-10].
В системах АЗН координаты ЛА, определяемые по ГНСС излучаются с ЛА в окружающее пространство бортовыми передатчиками АЗН для извещения о своем местоположении близко летящим ЛА [7-9].
В многопозиционных системах посадки (МПСП) в районе аэропорта предложено использование наземных узлов в виде наземных станций АЗН [6]: запросчики (ЗП) и наземные приемники (НП), работающие на частоте АЗН, принимают (в том числе и по запросу с земли) координаты ЛА и транслируют их по радиолинии связи на центральную станцию (ЦС), где производится их обработка и определение координат (разностно-дальномерным или дальномерным методом) по временам задержки сигналов до 3-х и более наземных станций (НС), координаты которых определены с высокой точностью [1]. В этом случае происходит совмещение системы навигации и системы наблюдения.
Однако все рассмотренные системы являются аналогами заявленного изобретения, не обладают достаточными точностью или надежностью при посадке ЛА из-за недостаточной точности определения высоты ЛА, в случае ГНСС с системой псевдоспутников - недостаточной надежностью при изменении рабочего созвездия спутников при кренах ЛА.
Проведем оценку ошибок указанной выше системы [12]. Согласно уравнению (3) в [1] на определение дальности существенно сказывается ошибка в высоте:

где: ΔНδ - ошибка определения высоты,
х, у, z - координаты ЛА,
xm, ym, zm - координаты приемников ответных сигналов. Ошибка измерения координат в общем случае составит:

где: НГ - ухудшение геометрического фактора,
σα - ошибка измерения дальностей.
Величина геометрического фактора НГ при нахождении ЛА внутри замкнутой области, ограниченной точками расположения наземных приемников (НП), составляет около единицы, за ее пределами - во много раз больше.
Величина σα в формуле (2), определенная разностно-дальномерным методом, составит 10-20 м в соответствии с [12, стр. 45].
Тогда ΔГК составит ΔГК≈1*(10-20 м)≈10-20 м при нахождении внутри области, ΔГК≈10*(10-20 м)≈100-200 м при нахождении ЛА вне области, что существенно превышает требования к системам точной посадки.
Еще хуже обстоит дело с высотой. Ошибка определения высоты: ΔВК≈(1.5-2)*(10-20 м)≈15-40 м при нахождении ЛА внутри области, ΔВК≈200-300 м при нахождении ЛА вне области, что не приемлемо для систем точной посадки.
Таким образом, определение высоты в системе - прототип требует увеличения точности и надежности.
Задачей заявленного изобретения является достижение максимально возможной в настоящее время точности в определении высоты ЛА в районе аэропорта (аэродрома) при заходе на посадку и посадке.
Она решается путем совмещения на основе системы-прототипа [1] полезных свойств систем-аналогов, используя новые связи между элементами (узлами) упомянутых систем и новую последовательность действий при определении высоты ЛА вновь созданной комплексной системой.
Задача решается следующим образом. Предлагается многопозиционная система посадки (МПСП) летательных аппаратов (ЛА), содержащая наземный запросчик и наземные станции с наземными приемниками ответных сигналов, соединенных по выходам через сигнальную линию связи с центральной станцией с наземной ЭВМ управления, управляющий выход которой через радиолинию управления посадкой ЛА соединен с бортовой аппаратурой ЛА, включающей бортовую аппаратуру управления и бортовой ответчик, соединенный через радиолинию «запрос-ответ» с наземным запросчиком, причем ЭВМ управления снабжена модулем расчета координат ЛА и его отклонений от заданной траектории посадки, при этом упомянутый модуль расчета координат ЛА и его отклонения от траектории посадки выполнен с учетом измерений на ЛА высоты полета, радиолиния управления ЛА выполнена в общем случае двунаправленной линией обмена «борт-земля», по которой в бортовую аппаратуру транслируются координаты ЛА и упомянутые отклонения, при этом в бортовую аппаратуру дополнительно включен бортовой приемник сигналов созвездия спутников ГНСС, по которому на ЛА определяются координаты ЛА и передаются через упомянутую линию обмена на наземную ЭВМ, в наземную аппаратуру дополнительно введена система псевдоспутников, излучающих сигналы системы спутниковой навигации, бортовой приемник выполнен с возможностью приема сигналов псевдоспутников, совместной обработки сигналов созвездия спутников и псевдоспутников, в результате которой определяются горизонтальные координаты и высота полета ЛА, упомянутые псевдоспутники совмещены по расположению с наземными станциями, при этом наземная ЭВМ выполнена с возможностью определения горизонтальных координат ЛА по сигналам от наземных станций дальномерным способом, а с центральной станции на ЛА дополнительно передаются координаты и вектор скорости соседних ЛА, при этом многопозиционная система посадки синхронизирована по системе ГНСС с высокой точностью, а расположение наземных станций с наземными приемниками и псевдоспутниками относительно взлетно-посадочной полосы (ВПП), число объединенных псевдоспутников и наземных станций определено с учетом требований к характеристикам многопозиционной системы посадки в зависимости от категории посадки ЛА, условий использования ВПП и требований по параметрам навигационных определений, например, для случая оптимизации навигационных определений по высоте в контролируемых точках глиссады при заходе на посадку и посадке.
Предлагается вариант, где МПСП совмещена с системой АЗН таким образом, что в качестве наземных запросчиков использованы наземные передатчики АЗН-В, а в качестве наземных приемников использованы приемники АЗН-В, на ЦС дополнительно размещен приемник сигналов АЗН-В, принимающий сигналы от бортовых передатчиков АЗН-В, которые передаются в наземную ЭВМ управления, где происходит сравнение координат и вектора скорости ЛА, получаемых по линии радиосвязи, и координат и вектора скорости, получаемых от передатчиков на частоте АЗН-В, а далее производится совместная обработка упомянутых координат и вектора скорости, по которой подтверждают достоверность координат и вектора скорости ЛА, определенных на борту по созвездию спутников и псевдоспутникам.
Предлагается вариант МПСП, где наземные передатчики и приемники АЗН-В и псевдоспутники совмещены функционально в одном приборе, выполненном с первой и второй антеннами, работающими на частотах АЗН-В и ГНСС соответственно, с общим генератором шкалы времени, геодезической привязкой наземных станций, к которой привязаны фазовые центры упомянутых антенн, а также общим источником требуемых напряжений электропитания.
Предлагается вариант МПСП, где в наземную ЭВМ введены блок параметров аэропорта и вычислитель оптимальных координат псевдоспутников, объединенных с наземными станциями.
Предлагается вариант МПСП, где число введенных псевдоспутников, объединенных с наземными станциями, и их расположение определяется в общем случае в результате оптимизации функционалов Ф1, Ф2, Ф3:
m=Ф1[F],
Li=Ф2[F], i=1,...,m,
Ai=Ф3[F], i=1,...,m,
где m - число оптимизируемых по положению псевдоспутников,
Li=Ф2[F], i=1,...,m, - длина вектора положения i-го псевдоспутника от точки пересечения оси ВПП с торцом,
Ai=Ф3[F], i=1,...,m, угол между осью ВПП и упомянутым вектором положения Li, для конкретного аэропорта,

 - широта, долгота и высота середины торца ВПП,
- широта, долгота и высота середины торца ВПП,
 - азимут осевой линии ВПП,
- азимут осевой линии ВПП,
ϕk, λk, hk - координаты k-ой опорной точки эталонной глиссады, соответственно широта, долгота и высота,
Li min - минимально допустимое удаление i-го псевдоспутника от середины торца ВПП,
Li max - максимально допустимое удаление -го псевдоспутника от середины торца ВПП,
I(H) - функционал качества, например, при оптимизации навигационных определений по высоте представляемый геометрическим фактором по высоте VDOP [4], усредненным по временному интервалу повторяемости конфигурации спутников в районе расположения конкретного аэропорта, в контролируемых точках глиссады,
Iв(H)=VDOP(H),
Н - матрица M+m направляющих косинусов векторов положений М спутников ГНСС и m псевдоспутников относительно ЛА в геоцентрической системе координат, причем сначала определяется оптимальное положение первого псевдоспутника (ПС), m=1, затем добавляется следующий ПС, определяются его оптимальные координаты и оценивается эффект от введения второго ПС в дополнение к первому, далее такая процедура продолжается для последующих ПС, до тех пор, пока эффект от введения последующих ПС не станет менее наперед заданной величины или не будет превышено максимально допустимое число ПС в сети, и это число ПС на последнем этапе оптимизации принимается за оптимальное число ПС в сети, после чего производится сравнение координат псевдоспутников оптимальной сети ПС с координатами наземных станций (НС), и в результате объединения координатной информации сети ПС и сети НС формируется объединенная сеть НС и ПС в координатах оптимизированного положения псевдоспутников.
Работа системы поясняется следующими фигурами:
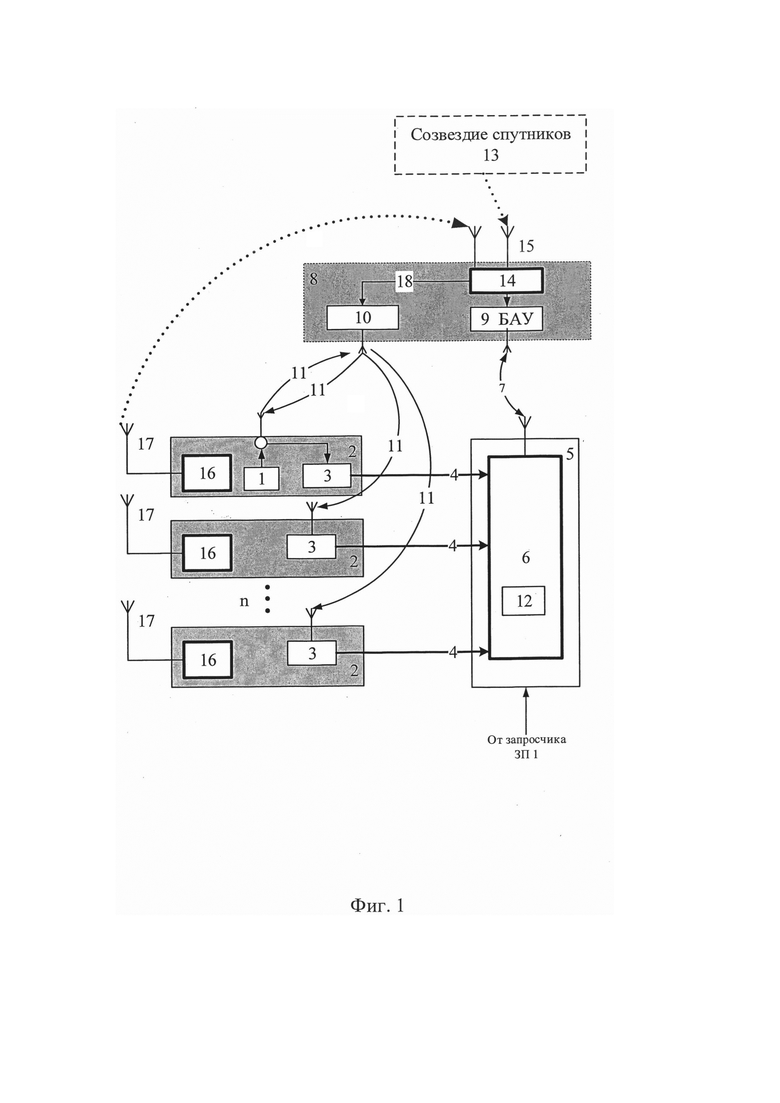
Фиг. 1 - функциональная схема МПСП,
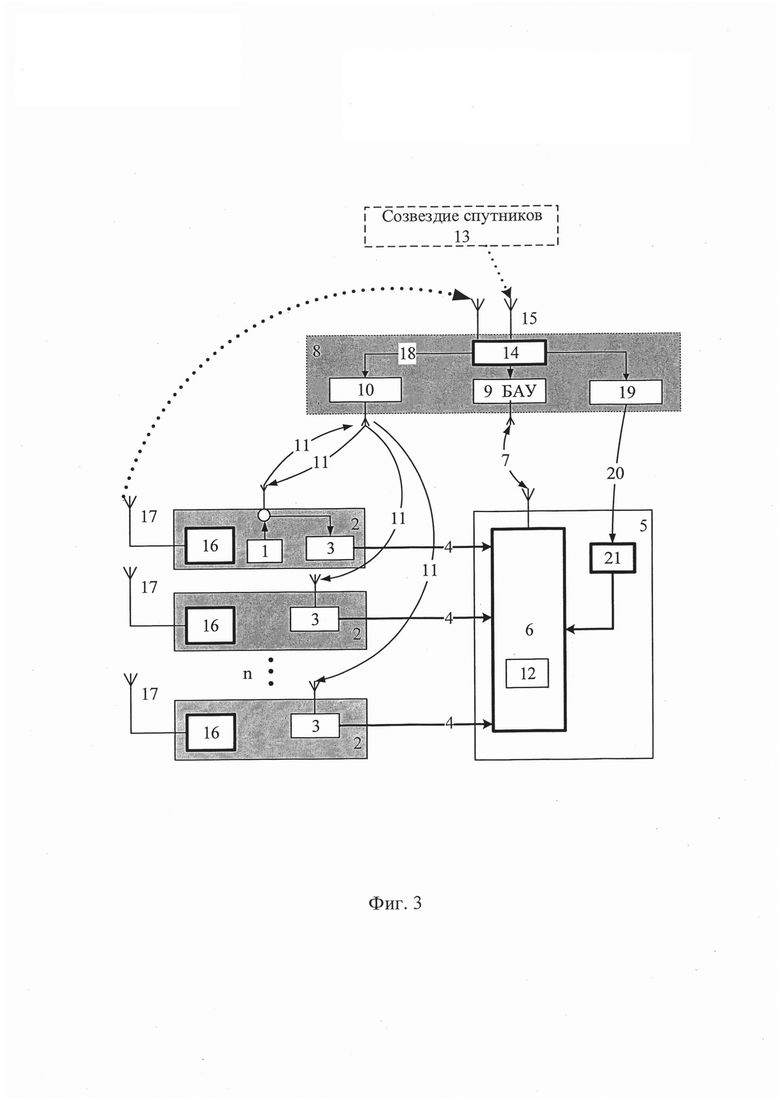
Фиг. 2 - пространственное расположение МПСП, совмещенной с системой ПС, относительно ВПП,
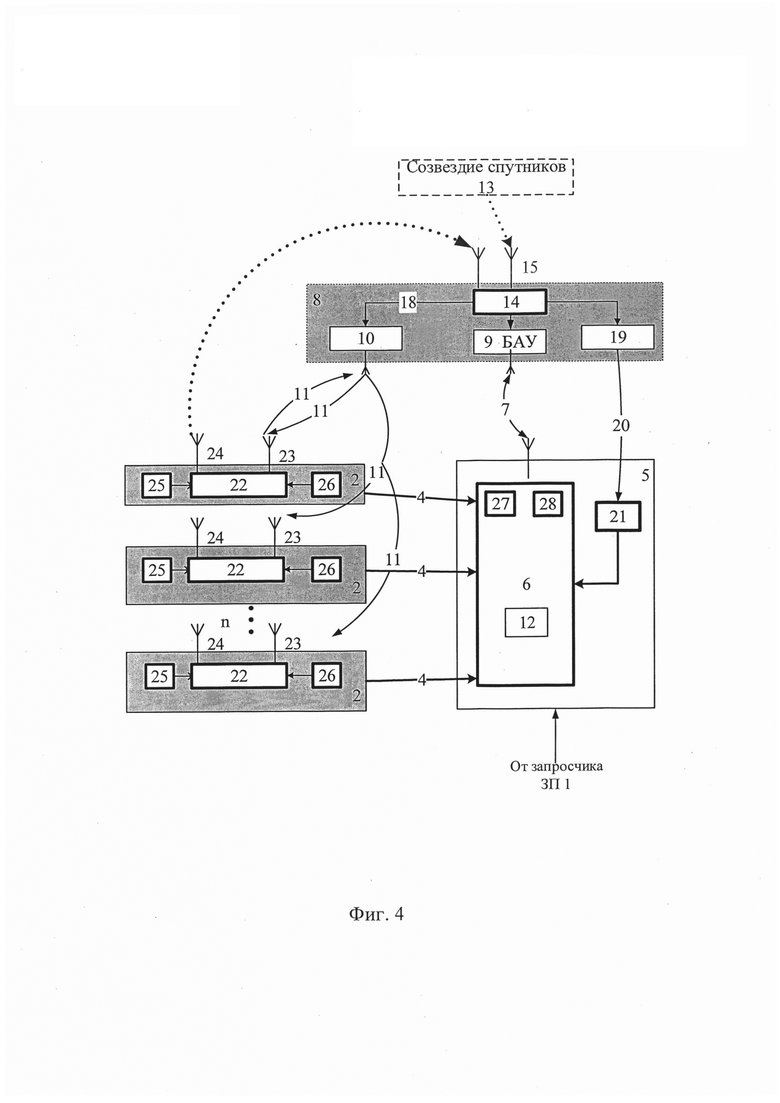
Фиг. 3 - - функциональная схема МПСП, совмещенной с системой АЗН-В,
Фиг. 4 - схема функционального совмещения наземных передатчиков и приемников АЗН-В с ПС.
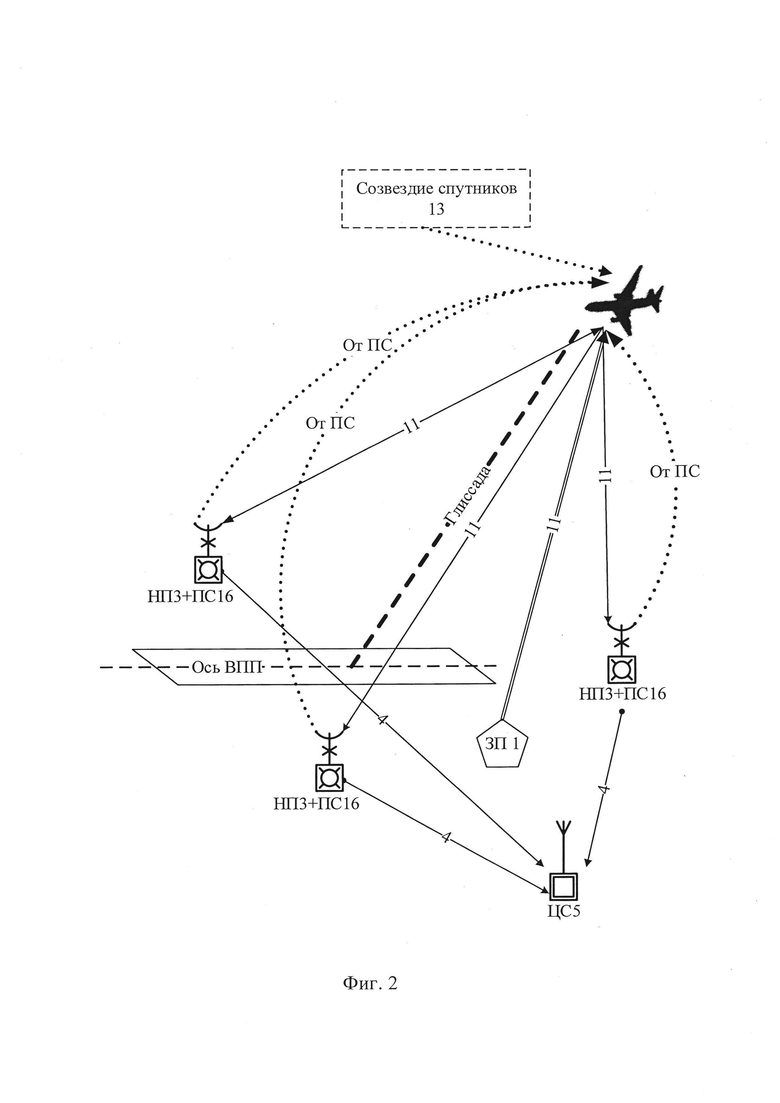
Согласно Фиг. 1, многопозиционная система посадки ЛА содержит наземный запросчик 1 и наземные станции (НС) 2 с наземными приемниками (НП) 3 ответных сигналов, соединенных по выходам через сигнальную линию связи 4 с центральной станцией (ЦС) 5 с наземной ЭВМ управления 6, управляющий выход которой через радиолинию управления посадкой ЛА 7 соединен с бортовой аппаратурой ЛА 8, включающей бортовую аппаратуру управления (БАУ) 9 и бортовой ответчик 10, соединенный через радиолинию «запрос-ответ» 11 с наземным запросчиком 1, причем ЭВМ управления 6 снабжена модулем расчета координат ЛА и его отклонений от заданной траектории посадки 12, при этом упомянутый модуль расчета координат ЛА и его отклонения от траектории посадки 12 выполнен с учетом измерений на ЛА высоты полета, радиолиния управления 7 ЛА выполнена в общем случае двунаправленной линией обмена «борт-земля», по которой в бортовую аппаратуру транслируются координаты ЛА и упомянутые отклонения. Данные узлы и связи являются общими с системой-прототипом [1], при этом в системе-прототипе бортовая аппаратура содержит измеритель высоты, значения которой передаются с ответным сигналом в НС 2. Отметим также, что ЭВМ в прототипе выполнена с программой расчета координат по сигналам от НС разностно-дальномерным способом. Новые узлы и связи, некоторые из которых имеются у систем-аналогов, - созвездие спутников ГНСС 13, бортовой приемник (БП) сигналов 14, принимающий сигналы от созвездия спутников с помощью приемной антенны 15, по которому на ЛА определяются координаты ЛА и передаются через БАУ 9 и упомянутую линию обмена 7 на наземную ЭВМ 6, в наземную аппаратуру дополнительно введена система псевдоспутников (ПС) 16, излучающих сигналы системы спутниковой навигации с помощью антенны 17, бортовой приемник 14 с приемной антенной 15 выполнен с возможностью приема сигналов псевдоспутников, совместной обработки сигналов созвездия спутников 13 и псевдоспутников 16, в результате которой определяются горизонтальные координаты и высота полета ЛА, высота полета через связь 18 транслируется в ответчик 10. Упомянутые псевдоспутники совмещены по расположению с наземными станциями 2, при этом наземная ЭВМ 6 выполнена с возможностью определения координат ЛА по сигналам от наземных станций 2 дальномерным способом, а с центральной станции 5 на ЛА дополнительно передаются координаты и вектор скорости соседних ЛА, при этом многопозиционная система посадки синхронизирована по системе ГНСС с высокой точностью. Расположение наземных станций с наземными приемниками 3 и псевдоспутниками 16 относительно взлетно-посадочной полосы (ВПП), число объединенных псевдоспутников 16 и наземных станций 2 определено с учетом требований к характеристикам многопозиционной системы посадки в зависимости от категории посадки ЛА, условий использования ВПП и требований по параметрам навигационных определений, например, для случая оптимизации навигационных определений по высоте - в контролируемых точках глиссады при заходе на посадку и посадке. Принципиально новым является объединение МПСП и системы ПС - совмещение их и расположение по общему закону с единой синхронизацией.
МПСН, в соответствии с Фиг. 1, работает следующим образом.
В части элементов и узлов системы прототипа работает аналогично. В запросчике 1 формируется и излучается запросный сигнал в зоне расположения ЛА. Бортовой ответчик излучает ответный сигнал с данными о высоте полета ЛА, который принимается на каждой наземной станции НС 2 наземным приемником НП 3. С выхода НП 3 ответный сигнал передается по линии связи 4 в ЦС 5 на вход ЭВМ 6, где фиксируется время прихода сигнала с каждого НП 3. По расстоянию между НП и ЦС определяют время прихода сигналов в НП. По времени задержки ответных сигналов и известной координатной привязке всех НП определяют координаты ЛА дальномерным (псевдодальномерным) способом.
Особенностью работы является использование значения высоты, вычисленного в МПСП другим способом - с помощью созвездия спутников ГНСС, объединенной с системой псевдоспутников. В части системы касающейся псевдоспутников и созвездия спутников ГНСС, работа происходит подобно системам-аналогам.
По сигналам, излучаемым созвездием спутников, принимаемым на ЛА антенной 15 и бортовым приемником БП 14, и сигналам, излучаемым псевдоспутниками 16, также принимаемыми БП 14, обычно с помощью дополнительной антенны, обращенной к земле, определяются псевдодальности ЛА, по которым определяется его местоположение (горизонтальные координаты и высота).
Далее работа происходит отличным от известных систем образом и составляет существенное отличие в заявляемой системе.
Координаты ЛА, включая высоту, определенные в наземной аппаратуре и на борту, поступают в ЭВМ 6, в модуль 12, где производится их совместная обработка одним из известных методов (например, с помощью фильтрации по методу Калмана). После данной обработки уточненные координаты и их отклонения от заданной глиссады поступают на борт ЛА в БАУ 9 через линию обмена 7. Существенной особенностью в работе заявляемой системы, является и то, что МПСН синхронизирована по системе ГНСС с высокой точностью, а расположение наземных станций с наземными приемниками и псевдоспутниками относительно взлетно-посадочной полосы (ВПП), число объединенных псевдоспутников и наземных станций определено с учетом требований к характеристикам многопозиционной системы посадки в зависимости от категории посадки ЛА, условий использования ВПП и требований по параметрам навигационных определений, например, для случая оптимизации навигационных определений по высоте - в контролируемых точках глиссады при заходе на посадку и посадке.
На Фиг. 2 дан пример совместного распределения МПСП с системой псевдоспутников относительно ВПП.
На Фиг. 3, где МПСП совмещена с системой АЗН-В, бортовой передатчик АЗН-В 19 излучает через радиолинию 20 сигналы, содержащие координаты ЛА. На центральной станции 5 дополнительно размещен приемник сигналов АЗН-В 21, принимающий сигналы 20 от передатчика АЗН-В 19, которые поступают в ЭВМ 6.
В качестве наземного запросчика 1 использован наземный передатчик АЗН-В, а в качестве наземных приемников 3 использованы приемники сигналов АЗН-В.
На ЦС 5 происходит сравнение координат и вектора скорости, получаемых от бортовых передатчиков АЗН-В 19 с помощью приемника сигналов АЗН-В 21 и координат определенных дальномерным способом с помощью НП АЗН-В 3.
В ЭВМ 6 производится совместная обработка информации, полученной от двух упомянутых методов, по которой подтверждается достоверность координат и вектора скорости ЛА, определенных на борту по созвездию спутников и псевдоспутников.
На Фиг. 4, в схеме функционального совмещения наземных передатчиков и приемников (АЗН-В) с псевдоспутниками, запросчик-передатчик АЗН-В 1, приемник 3 и псевдоспутник 16 выполнены в виде единого функционального узла (ФУ) 22 с первой 23 и второй 24 антеннами, работающими соответственно на частотах АЗН-В и ГНСС. В ФУ вводят общий генератор шкалы времени 25, сигналы которого поступают в каждый элемент ФУ 1,3, 16. Имеется общая геодезическая привязка всех наземных станций 2, к которой привязаны фазовые центры антенн 23 и 24. Кроме того, в ФУ входит общий источник электропитания 26, обеспечивающий энергией каждый элемент ФУ 21.
Предлагаемое функциональное совмещение позволит уменьшить общий уровень помех в наземной аппаратуре, так как легко обеспечивается общая экранировка от помех. Достигается также снижение энергопотребления, уменьшение наводок по сетям энергопитания, уменьшение габаритов и общей стоимости наземной аппаратуры.
В ранее известных МПСП [1-3] размещение наземных станций относительно ВПП происходит достаточно эмпирически - в контролируемой точке глиссады на концах ВПП и по схеме треугольника или креста. В предлагаемой системе для расчетов точек размещения псевдоспутников создана теоретическая база, согласно которой число псевдоспутников определяется с учетом требований к характеристикам МПСП в зависимости от категории посадки, условий использования ВПП и требований по параметрам навигационных определений.
В заявляемой МПСП оптимизация навигационных определений производится по высоте в контролируемых точках глиссады при заходе на посадку и посадке ЛА, так как именно наиболее точное определение высоты является важнейшей задачей данной системы. При предложенном совмещении элементов МПСП число и размещение объединенных НС и ПС происходит по общему закону, в основе которого лежит теория определения числа ПС и их расположения относительно ВПП.
Далее кратко рассматривается теоретическая основа предлагаемого общего закона определения и размещения НС и ПС относительно ВПП.
Для обеспечения алгоритма вычислений в ЭВМ введены блок параметров аэропорта 27 и вычислитель оптимальных координат объединенных НС и ПС 28.
Число введенных псевдоспутников, объединенных с наземными станциями, и их расположение определяется в общем случае в результате оптимизации функционалов Ф1, Ф2, ФЗ:
m=Ф1[F],
Li=Ф2[F], i=1,...,m,
Ai=Ф3[F], i=1,...,m,
где m - число оптимизируемых по положению псевдоспутников,
Li=Ф2[F], i=1,...,m, - длина вектора положения i-го псевдоспутника от точки пересечения оси ВПП с торцом,
Ai=Ф3[F], i=1,...,m, угол между осью ВПП и упомянутым вектором положения Li, для конкретного аэропорта,

 - широта, долгота и высота середины торца ВПП,
- широта, долгота и высота середины торца ВПП,
 - азимут осевой линии ВПП,
- азимут осевой линии ВПП,
ϕk, λk, hk, - координаты k-ой опорной точки эталонной глиссады, соответственно широта, долгота и высота,
Li min - минимально допустимое удаление i-го псевдоспутника от середины торца ВПП,
Li max - максимально допустимое удаление i-го псевдоспутника от середины торца ВПП,
I(H) - функционал качества, например, при оптимизации навигационных определений по высоте представляемый геометрическим фактором по высоте VDOP, усредненным по временному интервалу повторяемости конфигурации спутников в районе расположения конкретного аэропорта, в контролируемых точках глиссады,
Iв(H)=VDOP(H),
Н - матрица М+m направляющих косинусов векторов положений М спутников ГНСС и m псевдоспутников относительно ЛА в геоцентрической системе координат, причем сначала определяется оптимальное положение первого псевдоспутника (ПС), m=1, затем добавляется следующий ПС, определяются его оптимальные координаты, и оценивается эффект от введения второго ПС в дополнение к первому, далее такая процедура продолжается для последующих ПС, до тех пор, пока эффект от введения последующих ПС не станет менее наперед заданной величины или не будет превышено максимально допустимое число ПС в сети, и это число ПС на последнем этапе оптимизации принимается за оптимальное число ПС в сети, после чего производится сравнение координат псевдоспутников оптимальной сети ПС с координатами наземных станций НС, и в результате объединения координатной информации сети ПС и сети НС формируется объединенная сеть НС и ПС в координатах оптимизированного положения псевдоспутников.
Таким образом, предложенная МПСП обладает существенно новыми признаками:
- введение ПС и объединение МПСП и системы ПС;
- параллельная независимая работа двух систем и комплексная обработка вычисленных координат;
- функциональное объединение в одном объеме наземных станций и псевдоспутников;
- определение общего закона вычисления числа НС и ПС, их расположения относительно ВПП;
- совмещение в системе МПСП наземных станций, псевдоспутников и элементов АЗН-В.
Заявляемая МПСП будет использована в области гражданской авиации для повышения безопасности посадки различных типов ЛА на малооборудованные аэродромы и посадочные площадки. Экспертные оценки показывают, что использование предлагаемой МПСП позволит на 40-50% повысить точность наведения ЛА на глиссаду посадки, в 3-5 раз повысить эксплуатационную готовность аэродромов и в конечном итоге на 20-30% повысить безопасность полетов.
Источники информации:
1. Многофункциональная система посадки ВС. Патент РФ 2489325 МПК G-01S 1/16, B64D 45/04, заявл. 30.08.2011, опубл. 10.08.2013.
2. System of multistatic surveillance primary radar and receiver as part of such a system. Patent CZ 201400960 A3 МПК G-01S-007/03 G-01S-013/00 2016-070-07.
3. Process for location of object, mainly aircraft and a system for earring out this process. Patent WO 9805977 МПК G-01S-005/00 601S-013/66. Date of patent 11/04/18.
4. Спутниковая радионавигационная система захода на посадку и посадки. Патент РФ 2236020 МПК C27, 601S 5/021 Н04В 7/185, заявл. 19.09.2002, опубл. 10.09.2004.
5. Спутниковая радионавигационная система посадки с использованием псевдоспутников. Патент РФ 2439617 МПК G-01S 19/11, Н04В 7/185 заявл. 05.10.2010, опубл. 10.01.2012.
6. Руководство по авиационному наблюдению. ICAO DOC 9924 AN/474, 2010 г. Добавление L.
7. For mation flight system extremum - seeking - control using blended performance parameters. Patent US 2864,380 B1 date of patent j an. 9, 2010.
8. Virtual ADS-B for small aircraft. Patent US 9,922 571 B1 G-086 5/00, H04L 29/08 date of patent: mar. 20, 2018.
9. A method of communicating airborne multiration information / Patent EP 3088911 A1, МПК G-01S 5/00 G-01S 5/06 date of filing: 20.04.2015 G-05D 1/00 G-05D 1/10.
10. Univ display method based on ADS-B and TCAS data fusion. Patent CN 108153980(A), 2018-06-12 МПК G-06F17/50 H04B 7/185.
11. Широков И.Н., Крыжановский Г.А. Расширение поля СРНС с помощью наземных станций АЗН-В. Научный вестник МГТУ ГА №210, 2014 г., стр. 114-117.
12. Сосновский А.А., Хаймович И.А. и др. Авиационная радионавигация. Справочник. - М.: Транспорт, 1990 г., стр. 45.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2558412C1 |
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ПОСАДКИ С ИСПОЛЬЗОВАНИЕМ ПСЕВДОСПУТНИКОВ | 2010 |
|
RU2439617C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2489325C2 |
| Способ и устройство для контроля целостности измерений бортовой аппаратуры глобальной навигационной спутниковой системы (ГНСС) с применением измерений радиосистемы ближней навигации и псевдоспутников | 2021 |
|
RU2778093C1 |
| Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля | 2017 |
|
RU2659376C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| Устройство обеспечения посадки летательного аппарата | 2020 |
|
RU2757804C1 |
Многопозиционная система посадки (МПСП) летательных аппаратов (ЛА) содержит наземный запросчик, наземные станции с наземными приемниками ответных сигналов, центральную станцию с наземной ЭВМ управления, бортовую аппаратуру ЛА, бортовой приемник сигналов спутников глобальной спутниковой навигационной системы, систему псевдоспутников, совмещенных по расположению с наземными станциями. Обеспечивается увеличение точности определения высоты ЛА при заходе на посадку. 4 з.п. ф-лы, 4 ил.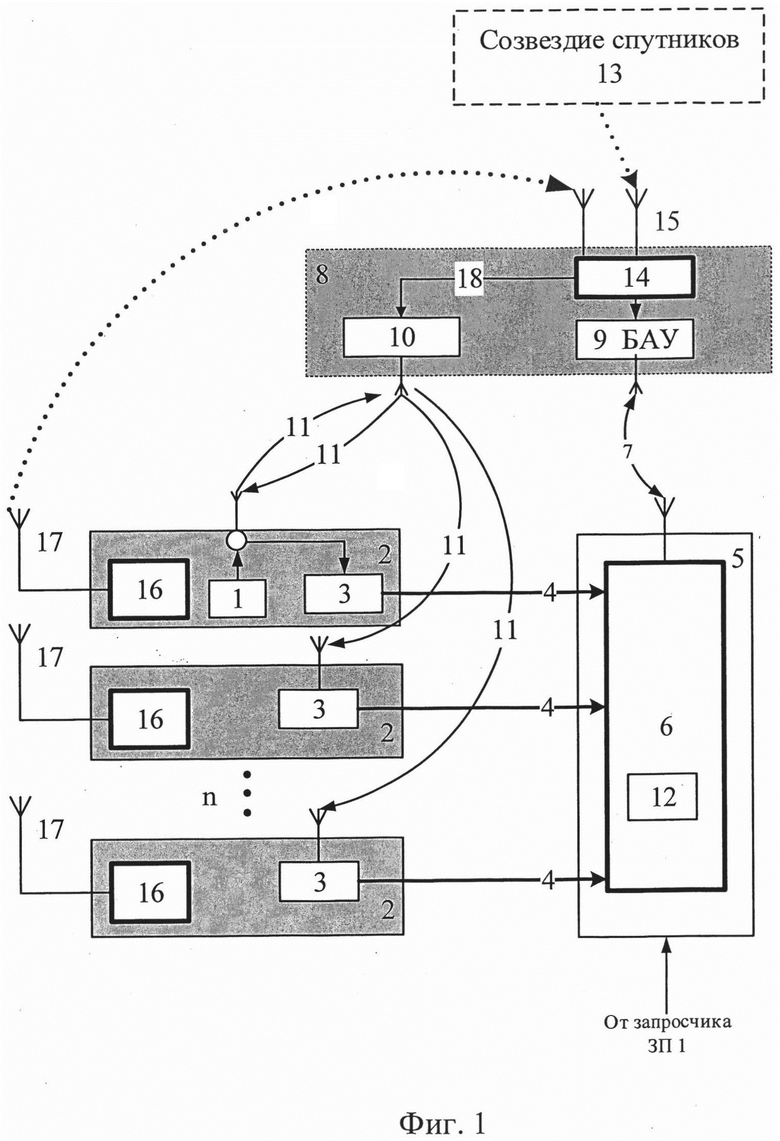
1. Многопозиционная система посадки (МПСП) летательных аппаратов (ЛА), содержащая наземный запросчик и наземные станции с наземными приемниками ответных сигналов, соединенных по выходам через сигнальную линию связи с центральной станцией с наземной ЭВМ управления, управляющий выход которой через радиолинию управления посадкой ЛА соединен с бортовой аппаратурой ЛА, включающей бортовую аппаратуру управления и бортовой ответчик, соединенный через радиолинию «запрос-ответ» с наземным запросчиком, причем ЭВМ управления снабжена модулем расчета координат ЛА и его отклонений от заданной траектории посадки, при этом упомянутый модуль расчета координат ЛА и его отклонения от траектории посадки выполнен с учетом измерений на ЛА высоты полета, радиолиния управления ЛА выполнена в общем случае двунаправленной линией обмена «борт-земля», по которой в бортовую аппаратуру транслируются координаты ЛА и упомянутые отклонения, отличающаяся тем, что в бортовую аппаратуру дополнительно включен бортовой приемник сигналов спутников глобальной спутниковой навигационной системы (ГНСС), по которому на ЛА определяются координаты ЛА и передаются через упомянутую линию обмена на наземную ЭВМ, в наземную аппаратуру дополнительно введена система псевдоспутников, излучающих сигналы системы спутниковой навигации, бортовой приемник выполнен с возможностью приема сигналов псевдоспутников, совместной обработки сигналов созвездия спутников и псевдоспутников, в результате которой определяются горизонтальные координаты и высота полета ЛА, упомянутые псевдоспутники совмещены по расположению с наземными станциями, при этом наземная ЭВМ выполнена с возможностью определения координат ЛА по сигналам от наземных станций дальномерным способом, а с центральной станции на ЛА дополнительно передаются координаты и вектор скорости соседних ЛА, при этом многопозиционная система посадки синхронизирована по системе ГНСС с высокой точностью, а расположение наземных станций с наземными приемниками и псевдоспутниками относительно взлетно-посадочной полосы (ВПП), число объединенных псевдоспутников и наземных станций определено с учетом требований к характеристикам многопозиционной системы посадки в зависимости от категории посадки ЛА, условий использования ВПП и требований по параметрам навигационных определений, например, для случая оптимизации навигационных определений по высоте упомянутое расположение проводят в контролируемых точках глиссады при заходе на посадку и посадке.
2. МПСП по п. 1, отличающаяся тем, что МПСП совмещена с системой АЗН-В, таким образом, что в качестве наземных запросчиков использованы наземные передатчики АЗН-В, а в качестве наземных приемников использованы приемники АЗН-В, на ЦС дополнительно размещен приемник сигналов АЗН-В, принимающий сигналы от бортовых передатчиков АЗН-В, которые передаются в наземную ЭВМ управления, где происходит сравнение координат и вектора скорости ЛА, получаемых по линии радиосвязи, и координат и вектора скорости, получаемых от передатчиков на частоте АЗН-В, а далее производится совместная обработка упомянутых координат и вектора скорости, по которой подтверждают достоверность координат и вектора скорости ЛА, определенных на борту по созвездию спутников и псевдоспутникам.
3. МПСП по п. 1, отличающаяся тем, что наземные передатчики и приемники АЗН-В и псевдоспутники совмещены функционально в одном приборе, выполненном с первой и второй антеннами, работающими на частотах АЗН-В и ГНСС соответственно, с общим генератором шкалы времени, общей геодезической привязкой наземных станций, к которой привязаны фазовые центры упомянутых антенн, а также общим источником требуемых напряжений электропитания.
4. МПСП по п. 1, отличающаяся тем, что в наземную ЭВМ введены блок параметров аэропорта и вычислитель оптимальных координат псевдоспутников, объединенных с наземными станциями.
5. МПСП по п. 1, отличающаяся тем, что число введенных псевдоспутников, объединенных с наземными станциями, и их расположение определяется в общем случае в результате оптимизации функционалов Ф1, Ф2, Ф3:
m=Ф[F],
Li=Ф2[F], i=1,…,m,
Ai=Ф3[F], i=1,…,m,
где m - число оптимизируемых по положению псевдоспутников,
Li=Ф2[F], i=1,…,m, - длина вектора положения i-го псевдоспутника от точки пересечения оси ВПП с торцом,
Ai=Ф3[F], i=1,…,m, угол между осью ВПП и упомянутым вектором положения Li, для конкретного аэропорта,

 - широта, долгота и высота середины торца ВПП,
- широта, долгота и высота середины торца ВПП,
 - азимут осевой линии ВПП,
- азимут осевой линии ВПП,
ϕk, λk, hk, - координаты k-ой опорной точки эталонной глиссады, соответственно широта, долгота и высота,
Li min - минимально допустимое удаление i-го псевдоспутника от середины торца ВПП,
Li max - максимально допустимое удаление i-го псевдоспутника от середины торца ВПП,
I(H) - функционал качества, например, при оптимизации навигационных определений по высоте, представляемый геометрическим фактором по высоте VDOP, усредненным по временному интервалу повторяемости конфигурации спутников в районе расположения конкретного аэропорта, в контролируемых точках глиссады,
Iв(H)=VDOP(H),
Н - матрица М+m направляющих косинусов векторов положений М спутников ГНСС и m псевдоспутников относительно ЛА в геоцентрической системе координат, причем сначала определяется оптимальное положение первого псевдоспутника (ПС), m=1, затем добавляется следующий ПС, определяются его оптимальные координаты и оценивается эффект от введения второго ПС в дополнение к первому, далее такая процедура продолжается для последующих ПС, до тех пор, пока эффект от введения последующих ПС не станет менее наперед заданной величины или не будет превышено максимально допустимое число ПС в сети, и это число ПС на последнем этапе оптимизации принимается за оптимальное число ПС в сети, после чего производится сравнение координат псевдоспутников оптимальной сети ПС с координатами наземных станций (НС), и в результате объединения координатной информации сети ПС и сети НС формируется объединенная сеть НС и ПС в координатах оптимизированного положения псевдоспутников.
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2558412C1 |
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
| 0 |
|
SU100836A1 | |
| US 8380367 B2, 19.02.2013 | |||
| WO 2000041153 A1, 13.07.2000. | |||

