Предлагаемое изобретение относится к радиолокации, а именно к способу определения местоположения воздушных объектов в многопозиционной радиолокационной системе, развернутой с использованием многолучевых радиопередатчиков из состава наземной локальной пространственно распределенной радионавигационной системы (РНС), излучающих фазокодоманипулированные (ФКМн) навигационные сигналы для зондирования воздушного пространства в рабочей зоне РНС, приемника, принимающего сигналы, отраженные от воздушных объектов.
Радионавигационная система «многолучевые радиопередатчики - воздушные объекты - приемник» решает задачу, связанную с объединением в приемнике информации от сигналов, отражаемых воздушными объектами, облучаемыми радиопередатчиками при радиолокационном наблюдении. Важнейшей составляющей рассматриваемой задачи является процедура отождествления измерений, то есть определения принадлежности и отнесения измеряемых параметров отраженных зондирующих сигналов к конкретному лоцируемому воздушному объекту.
В радиолокации весьма обширный и важный класс лоцируемых объектов составляют источники радиоизлучений, наблюдение за которыми осуществляется приемниками, принимающими излучаемые радиосигналы. Широкое применение на практике нашли многопозиционные системы, описанные в [1]. В этом источнике рассматриваются методы определения пространственного положения одной цели: эллиптический, гиперболический, триангуляционный, а такие их сочетания, но отсутствуют сведения о позиционных измерениях и определении местоположения целей в наземной пространственно распределенной радионавигационной системе в условиях многоцелевой обстановки и не решается задача отождествления измерений.
Известен способ многопозиционной радиолокации [2], состоящий в излучении радиолокационных сигналов, синхронизированном приеме отраженных сигналов аппаратурой разнесенных позиций, объединении и совместной обработке принятых сигналов и информации разнесенных позиций, полученной от других радиолокационных средств. Аппаратурой разнесенных позиций, подключенной с помощью аппаратуры высокочастотного присоединения к линиям электропередачи (ЛЭП), осуществляют синхронизированные излучение и прием сигналов с использованием ЛЭП, затем при обработке полученной информации осуществляют корректировку информации, полученной в результате обработки сигналов, принятых с ЛЭП, посредством сопоставления ее с сигналами, отраженными от целей, полученными аппаратурой разнесенных позиций, и с информацией, полученной аппаратурой разнесенных позиций от других радиолокационных средств. Но в этом способе отсутствуют математические выражения, позволяющие определить местоположение целей и провести отождествление измерений в многоцелевой обстановке.
Известна многопозиционная система определения местоположения воздушных судов [3], содержащая наземный радиозапросчик и самолетный ответчик, соединенные линией запроса, не менее трех приемников ответных сигналов, соединенных с самолетным ответчиком по линиям ответа, ЭВМ с модулем расчета координат воздушного судна, выполненным с учетом измерения высоты полета и разности дальностей до воздушного судна относительно местоположения запросчика и др. В этой системе отождествление воздушных судов осуществляется по кодированному ответному сигналу, содержащему в общем виде информацию о бортовом номере, высоте, запасе топлива. Однако при отсутствии ответного сигнала отождествление измерений становится невозможным.
Таким образом, известные к настоящему времени многопозиционные системы не содержат описания способа отождествления позиционных измерений и определения местоположения нескольких воздушных объектов, одновременно присутствующих в рабочей зоне многопозиционной радиолокационной системы, применимого в многопозиционной радиолокационной системе, развертываемой на базе наземной локальной пространственно распределенной радионавигационной системы и реализующей концепцию бистатической локации и применения разностно-дальномерного метода для обнаружения и определения параметров воздушных объектов, присутствующих в рабочей зоне системы.
Задачей предлагаемого способа является отождествление позиционных измерений и определение местоположения нескольких воздушных объектов радионавигационной системой по измерениям сумм расстояний от объектов до многолучевых радиопередатчиков и приемника, принимающего отраженные от воздушных объектов сигналы.
Поставленная задача решается способом отождествления позиционных измерений и определения местоположения воздушных объектов в многопозиционной радионавигационной системе, содержащей N многолучевых радиопередатчиков с узконаправленными секторами излучения в заданных областях обзора и приемник, синхронизированный с многолучевыми радиопередатчиками, осуществляющим:
- одновременное излучение каждым n-м (n=1, 2, …, N) многолучевым радиопередатчиком с координатами xn, yn, zn, n=1, 2, …, N зондирующих сигналов в узких по направлению секторах, расположенных в заданных областях обзора, каждый сигнал имеет свой индивидуальный идентификатор Иnk, содержащий номер многолучевого радиопередатчика n и номер сектора k (k=1, 2, …, K);
- прием приемником с координатами х0, у0, z0, синхронизированного с многолучевыми радиопередатчиками, отраженных от М воздушных объектов зондирующих сигналов;
- обработку принятых сигналов с целью выделения индивидуального идентификатора зондирующего сигнала Иnk, определяющего номер многолучевого радиопередатчика n и номер сектора излучения зондирующего сигнала k, и параметров, характеризующих время распространения радиоволн на трассе «n-й многолучевой радиопередатчик - m-й воздушный объект - приемник»;
- оценку на основе этих параметров длины трассы «n-й многолучевой радиопередатчик - m-й воздушный объект - приемник» Rnm;
- отождествление оценки Rnm по индивидуальному идентификатору зондирующего сигнала Иnk, то есть установление соответствия оценки Rnm конкретно n-му многолучевому радиопередатчику (номер многолучевого радиопередатчика является атрибутом идентификатора Иnk) и m-му, а не другому воздушному объекту в ситуации, когда упомянутые воздушные объекты присутствуют в различных секторах излучения зондирующих сигналов данного многолучевого радиопередатчика (номер сектора излучения является атрибутом идентификатора Иnk).
-расчет координат М воздушных объектов из m=1, 2, …, М систем уравнений
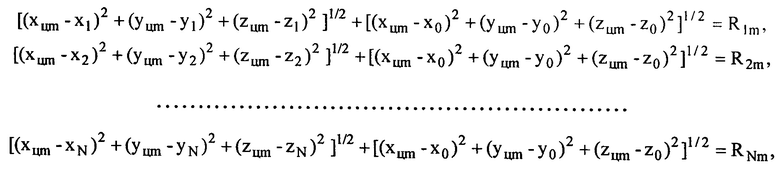
где xцm, уцm, zцm - искомые координаты воздушных объектов m=1, 2, …, М.
На Фиг. 1 приведена функциональная схема многопозиционной радионавигационной системы, содержащая многолучевые радиопередатчики 11, 12, …, 1N зондирующих сигналов с известными координатами xn, yn, zn, n=1, 2, …, N и приемник 2 с известными координатами х0, у0, z0. В зоне действия радионавигационной системы находятся воздушные объекты 31, 32, …, 3M с искомыми координатами xцm, yцm, zцm.
Многолучевые радиопередатчики 11, 12, …, 1N излучают зондирующие сигналы в узких по направлению секторах, расположенных в заданных областях обзора, каждый сигнал имеет дополнительную модуляцию, содержащую индивидуальный идентификатор Иnk с номером многолучевого радиопередатчика n и номером сектора k (k=1, 2, …, K).
Приемник 2 с известными координатами х0, у0, z0, синхронизированный с многолучевыми радиопередатчиками 11, 12, …, 1N, осуществляет:
- прием сигналов, рассеянных воздушными объектами 31, 32, …, 3m, …, 3M, находящимися в зоне действия многопозиционной радионавигационной системы.
- по индивидуальным идентификаторам Иnk многолучевых радиопередатчиков 11, 12, …, 1N, и секторов, содержащимся в принимаемых сигналах, отождествляет принимаемые сигналы с соответствующими многолучевыми радиопередатчиками 11, 12, …, 1N, и воздушными объектами 31, 32, …, 3m, …, 3M;
- по отождествленным сигналам измеряет расстояния Rnm вдоль путей распространения зондирующих сигналов «n-й многолучевой радиопередатчик - m-я воздушный объект - приемник».
Измеренные расстояния Rnm вдоль трассы распространения «n-й многолучевой радиопередатчик - m-й воздушный объект - приемник» ставятся в соответствие с искомыми координатами xцm, yцm, zцm m=1, 2, …, М воздушных объектов 31, 32, …, 3m, …, 3M, с помощью систем уравнений
Решение этих систем уравнений относительно координат xцm, yцm, zцm m=1, 2, …, М можно осуществить, например, итерационным методом [4].
Таким образом, в предложенном способе отождествление измерений длины каждой трассы бистатической локации «n-й многолучевой радиопередатчик - m-й воздушный объект - приемник» в условиях присутствия в рабочей зоне многопозиционной радиолокационной системы одновременно нескольких воздушных объектов 31, 32, …, 3m, …, 3M обеспечено:
- применением многолучевых радиопередатчиков 11, 12, …, 1N, которые излучают синхронизированные зондирующие сигналы одновременно в нескольких узких пространственных секторах в заданную область пространства бистатической локации;
- формированием зондирующего сигнала путем дополнительной модуляции исходного навигационного сигнала кодовой последовательностью индивидуального идентификатора зондирующего сигнала, определяющей номер многолучевого радиопередатчика 11, 12, …, 1N, и номер сектора излучения зондирующего сигнала;
- распознаванием принятых сигналов, отраженных воздушными объектами 31, 32, …, 3m, …, 3M по индивидуальному идентификатору зондирующего сигнала, выделяемому при обработке принятого сигнала;
- оценкой длины трассы «n-й многолучевой радиопередатчик - m-й воздушный объект - приемник».
Координаты воздушных объектов 31, 32, …, 3m, …, 3M определяются из системы нелинейных уравнений итерационным методом.
Литература
1. Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь, 1993, стр. 73-74, 392-396].
2. Патент 2332684 РФ, МПК G01S 10/00. Способ многопозиционной радиолокации и устройство для его осуществления / А.Л. Куликов (РФ); Куликов Александр Леонидович (РФ). - №2007102750; Заявлено 24.01.2007; Опубл. 27.08.2008. Бюл. 24. 5 с.: 1 ил.
3. Патент 2584689 РФ, МПК G01S 13/74. Многопозиционная система определения воздушных судов / Г.Н. Майков (РФ), А.В. Демидюк (РФ), Е.В. Демидюк (РФ); Майков Геннадий Николаевич (РФ), Демидюк Андрей Викторович (РФ), Демидюк Евгений Викторович (РФ). - №2014145250; Заявлено 11.11.2014; Опубл. 20.05.2016. Бюл. 14. 11 с.: 3 ил.
4. Шебшаевич B.C., Дмитриев П.П., Иванцевич Н.В. и др. Сетевые спутниковые радионавигационные системы / Под ред. П.П. Дмитриева и B.C. Шебшаевича. М.: Радио и связь, 1982. 272 с.

Изобретение относится к радиолокации, а именно к способу определения местоположения воздушных объектов в многопозиционной радиолокационной системе, развернутой с использованием многолучевых радиопередатчиков из состава наземной локальной пространственно распределенной радионавигационной системы (РНС). Достигаемый технический результат – отождествление позиционных измерений и определение местоположения нескольких воздушных объектов радионавигационной системой по измерениям сумм расстояний от объектов до многолучевых радиопередатчиков и приемника, принимающего отраженные от воздушных объектов сигналы. Указанный результат достигается за счет того, что осуществляют одновременное излучение каждым n-м (n=1, 2, …, N) многолучевым радиопередатчиком зондирующих сигналов в узких по направлению секторах, расположенных в заданных областях обзора, каждый сигнал имеет свой индивидуальный идентификатор Иnk, содержащий номер многолучевого радиопередатчика n и номер сектора k (k=1, 2, …, K); прием приемником с координатами x0, у0, z0, синхронизированного с многолучевыми радиопередатчиками, отраженных от М воздушных объектов зондирующих сигналов; обработку принятых сигналов с целью выделения индивидуального идентификатора зондирующего сигнала Иnk, определяющего номер многолучевого радиопередатчика n и номер сектора излучения зондирующего сигнала k, и параметров, характеризующих время распространения радиоволн на трассе «n-й многолучевой радиопередатчик - m-й воздушный объект - приемник»; оценку на основе этих параметров длины трассы «n-й многолучевой радиопередатчик - m-й воздушный объект - приемник» Rnm; отождествление оценки Rnm по индивидуальному идентификатору зондирующего сигнала Иnk; определение координаты воздушных объектов, одновременно присутствующих в рабочей зоне многопозиционной радиолокационной системы. 1 ил.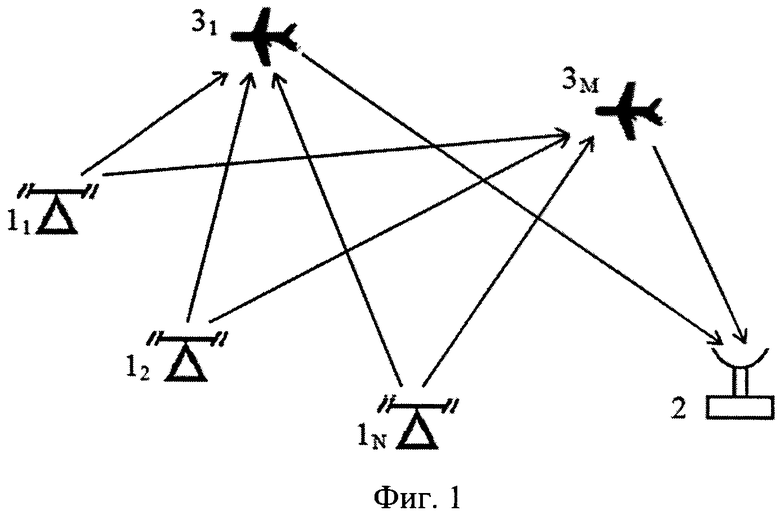
Способ отождествления позиционных измерений и определения местоположения воздушных целей в многопозиционной радионавигационной системе с использованием многолучевых передатчиков, содержащей N многолучевых передатчиков с узконаправленными секторами излучения в заданных областях обзора и приемник, синхронизированный с передатчиками, осуществляющий:
- одновременное излучение каждым n-м многолучевым радиопередатчиком с координатами xn, yn, zn, n=1, 2, …, N зондирующих сигналов в узких по направлению секторах, расположенных в заданных областях обзора, каждый сигнал имеет свой индивидуальный идентификатор Иnk содержащий номер многолучевого радиопередатчика n и номер сектора k;
- прием приемником с координатами х0, у0, z0, синхронизированного с многолучевыми радиопередатчиками, отраженных от М воздушных объектов зондирующих сигналов;
- обработку принятых сигналов с целью выделения индивидуального идентификатора зондирующего сигнала Иnk, определяющего номер многолучевого радиопередатчика n и номер сектора излучения зондирующего сигнала k, и параметров, характеризующих время распространения радиоволн на трассе «n-й многолучевой радиопередатчик - m-й воздушный объект - приемник»;
- оценку на основе этих параметров длины трассы «n-й многолучевой радиопередатчик - m-й воздушный объект - приемник» Rnm;
- отождествление оценки Rnm по индивидуальному идентификатору зондирующего сигнала Иnk, то есть установление соответствия оценки конкретно n-му многолучевому радиопередатчику, при этом номер многолучевого радиопередатчика является атрибутом идентификатора Иnk, и m-му, а не другому воздушному объекту в ситуации, когда упомянутые воздушные объекты присутствуют в различных секторах излучения зондирующих сигналов данного многолучевого радиопередатчика;
- расчет координат М воздушных объектов из m=1, 2, …, М систем уравнений

где xцm, уцm, zцm - искомые координаты воздушных объектов m=1, 2, …, М.
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2584689C1 |
| СПОСОБ СТРОБОВОГО ОТОЖДЕСТВЛЕНИЯ СИГНАЛОВ С ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ В МНОГОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2014 |
|
RU2557784C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТОВ В ПРОСТРАНСТВЕ, ДАЛЬНОСТИ, ПЕЛЕНГА, КООРДИНАТ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2152625C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, ОПРЕДЕЛЕНИЯ КООРДИНАТ И СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2564385C1 |
| JP 2010091407 A, 22.04.2010 | |||
| JP 5852059 B2, 03.02.2016 | |||
| WO 2003005058 A2, 16.01.2003. | |||

