Настоящее изобретение относится к измерительной технике, а именно к средствам контроля состояния конструкций искусственных сооружений для железнодорожного транспорта в процессе их эксплуатации, и может применяться для выявления потенциально опасных участков железнодорожного пути и его окружения.
Известно изобретение «СИСТЕМА МОНИТОРИНГА НАПРЯЖЕНИЙ ДЛЯ ЖЕЛЕЗНЫХ ДОРОГ» [Патент РФ 2441788, опубл. 10.02.2012], которое может быть использовано для мониторинга объектов железнодорожной инфраструктуры и оно содержит модуль чувствительных элементов, по меньшей мере, один модуль сбора данных и модуль обработки данных. Причем модуль чувствительных элементов включает, по меньшей мере, один датчик, выполненный с возможностью его установки прямо на рельсовом звене и дополнительно включающий в себя плоскую прокладку, на которой установлен, по меньшей мере, один чувствительный элемент. При этом каждый чувствительный элемент может представлять собой, например, датчик деформаций или температурный датчик. Каждый модуль сбора данных связан, по меньшей мере, с одним из перечисленных датчиков. Модуль обработки данных выполнен с возможностью приема и обработки информации, собираемой, по меньшей мере, одним модулем сбора данных, чтобы определять напряжение рельса. Также имеется передающее средство, связанное, по меньшей мере, с одним модулем сбора данных для передачи информации в модуль обработки данных. При этом модуль обработки данных дополнительно может содержать портативный считыватель и портативный процессор для обработки данных.
Недостатком известной системы является ее низкая точность при контроле состояния всей железнодорожной инфраструктуры, поскольку с ее помощью можно контролировать лишь один объект инфраструктуры, а именно, рельс.
Известно изобретение «СИСТЕМА МОНИТОРИНГА ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ ИНФРАСТРУКТУРЫ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА» [Патент РФ 2450346, опубл. 10.05.2012]. Оно содержит, по меньшей мере, один координатор, связанные между собой посредством радиоканала сенсорные узлы, размещенные в критических местах конструкции протяженного объекта, и два сторожевых узла, расположенных по разные стороны местонахождения объекта инфраструктуры на заданном расстоянии от него. Каждый сенсорный узел включает автономный источник питания, сенсорные датчики, приемопередатчик и микроконтроллер, соответствующие входы/выходы которого подключены к выходам/входам сенсорных датчиков и приемопередатчика. В качестве датчиков могут быть применены цифровые инклинометры, и/или тензодатчики, и/или акселерометры, и/или датчики силы сжатия/растяжения, и/или датчики трещин. Каждый координатор включает автономный источник питания, контроллер и приемопередатчик, соединенный посредством радиоканала с приемопередатчиками сенсорных узлов. Каждый сторожевой узел включает контроллер, приемопередатчик, соединенный входом/выходом с выходом/входом контроллера, и автономный источник питания. Имеется также блок сбора данных, установленный на автоматизированном рабочем месте оператора передвижного транспортного средства и включающий вычислительный блок, радиомодем для формирования канала радиосвязи с приемопередатчикам координаторов и сторожевых узлов. Кроме того система включает блок управления, блок памяти, базу данных, базу знаний и маршрутизатор, вход/выход каждого из которых соединен с соответствующим выходом/входом вычислительного блока. Причем вход/выход радиомодема подключен к другому выходу/входу маршрутизатора, а другой выход вычислительного блока соединен с входом блока отображения аппаратно-программного устройства автоматизированного рабочего места оператора подвижного транспортного средства, приемопередающее устройство которого соединено входом/выходом с соответствующим выходом/входом вычислительного блока. В каждый координатор дополнительно включены база знаний и блок памяти, вход/выход каждого из которых соединен с соответствующим выходом/входом контроллера, другим входом/выходом подключенного к входу/выходу приемопередатчика. В аппаратно-программное устройства рабочего места оператора ситуационного центра железной дороги дополнительно введены база знаний, база данных, блок памяти и блок принятия решений, вход/выход каждого из которых подключен к соответствующему выходу/входу центрального процессора автоматизированного рабочего места оператора ситуационного центра, другие входы/выходы которого через сервер связи связаны с выходами/входами приемопередающего устройства подвижного транспортного средства. При этом программное обеспечение центрального процессора дополнительно включает анализ текущего состояния объекта мониторинга и прогнозирование его будущего состояния с возможностью отображения на мониторе блока отображения автоматизированного рабочего места оператора ситуационного центра данных мониторинга объекта на его трехмерной модели и/или отдельных элементах его конструкции.
После анализа описания этого изобретения можно сделать вывод, что, в сущности, имеющийся координатор представляет собой станцию сбора и первичной обработки данных, каждый сенсорный узел представляет собой измерительный модуль, а блок сбора данных выполняет функцию центрального блока сбора данных.
Это техническое решение выбирается в качестве прототипа, так как оно имеет наибольшее число существенных признаков, совпадающих с существенными признаками заявляемого изобретения.
Однако прототип имеет существенный недостаток, а именно: низкая точность мониторинга объектов железнодорожной инфраструктуры, обусловленная тем, что о состоянии инфраструктуры судят по данным об измерении параметров только протяженных объектов. Это так же ограничивает функциональные возможности применения прототипа. Кроме того точность снижена еще и потому, что датчики не имеют непосредственной связи с объектом, поскольку сторожевые узлы с измерительными модулями расположены на некотором расстоянии от объекта контроля. При этом место расположения сторожевых узлов относительно контролируемого объекта не определено, что может приводить к их размещению вне зоны влияния измеряемых ими параметров на основные параметры контролируемого объекта.
Задачей настоящего изобретения является разработка новой системы мониторинга объектов железнодорожной инфраструктуры с достижением следующего технического результата: повышение точности контроля при одновременном расширении функциональных возможностей.
Поставленная задача решена за счет того, что в известной системе мониторинга объектов железнодорожной инфраструктуры, содержащей, по меньшей мере, одну станцию сбора и первичной обработки данных и связанные с ней и между собой посредством радиосвязи измерительные модули, размещенные в критических местах контролируемых объектов железнодорожной инфраструктуры, центральный блок сбора данных, связанный со станцией сбора и первичной обработки данных, по меньшей мере, одно автоматизированное рабочее место, связанное с центральным блоком сбора данных, при этом каждый измерительный модуль включает автономный источник питания, сенсорные датчики, приемопередатчик и микроконтроллер, каждая станция сбора и первичной обработки данных включает автономный источник питания, контроллер и приемопередатчик, соединенный посредством радиоканала с приемопередатчиками измерительных модулей, а центральный блок сбора данных включает вычислительный блок, базу данных, блок управления и приемопередатчик, соединенный посредством радиоканала с приемопередатчиками станций сбора и первичной обработки данных, согласно настоящему изобретению, измерительные модули выполнены с возможностью осуществления измерения удлинения рельса, сдвига земляного полотна, натяжения контактной сети, наклона опоры контактной сети, соответственно, причем измерительный модуль, предназначенный для измерения удлинения рельсов, выполнен с возможностью его установки на шейке контролируемого рельса и дополнительно содержит тензометрический многоосевоой датчик силы и датчик температуры рельса, измерительный модуль, предназначенный для измерения сдвига земляного полотна, выполнен с возможностью его установки в земляном полотне насыпи контролируемого пути и дополнительно включает датчик измерения углов поворота опорного стержня и датчик температуры основного стержня, измерительный модуль, предназначенный для измерения натяжения контактной сети, выполнен с возможностью его установки в подвижном ролике компенсаторной подвески контактного или несущего провода, закрепленного на контролируемой опоре, и дополнительно включает датчик измерения углов поворота подвижного ролика и датчик температуры окружающей среды, измерительный модуль, предназначенный для измерения наклона опоры контактной сети, выполнен с возможностью его установки на контролируемой опоре контактной сети и дополнительно включает датчик измерения углов отклонения опоры относительно ее первоначальной установки.
Таким образом, это заявляемое техническое решение всей своей совокупностью существенных признаков позволяет повысить точность мониторинга объектов железнодорожной инфраструктуры за счет контроля большего количества независимых параметров, охватывающих объемно-протяженную структуру измеряемого объекта, благодаря выполнению измерительных модулей с возможностью контроля состояния большего количества дискретных объектов на заданном участке, а именно удлинения рельсов, сдвига земляного полотна, натяжения контактной сети и наклона опоры контактной сети. При этом измерение параметров объектов происходит с большей точностью за счет наличия в измерительных модулях датчиков, а также за счет расположения этих модулей на объекте контроля таким образом, чтобы их датчики контактировали непосредственно с критическим местом объекта. Таким образом, с помощью этих измерительных модулей стало возможным производить комплексные измерения параметров контролируемых объектов инфраструктуры. Одновременно с этим достигается и расширение функциональных возможностей и области применения заявляемой системы, поскольку с ее помощью можно контролировать не только протяженные объекты (см. прототип) такие, как рельс и контактная сеть, но и другие - сдвиг земляного полотна и наклон опоры контактной сети.
Заявителем проведен патентно-информационный поиск по данной теме, в результате которого заявляемая совокупность существенных признаков не выявлена. Поэтому предлагаемое изобретение можно признать новым. При этом данное изобретение для специалиста логически не следует из известного уровня техники и поэтому соответствует критерию патентоспособности «изобретательский уровень».
Сущность заявляемого изобретения и возможность его практической реализации поясняется приведенным ниже описанием и чертежами.
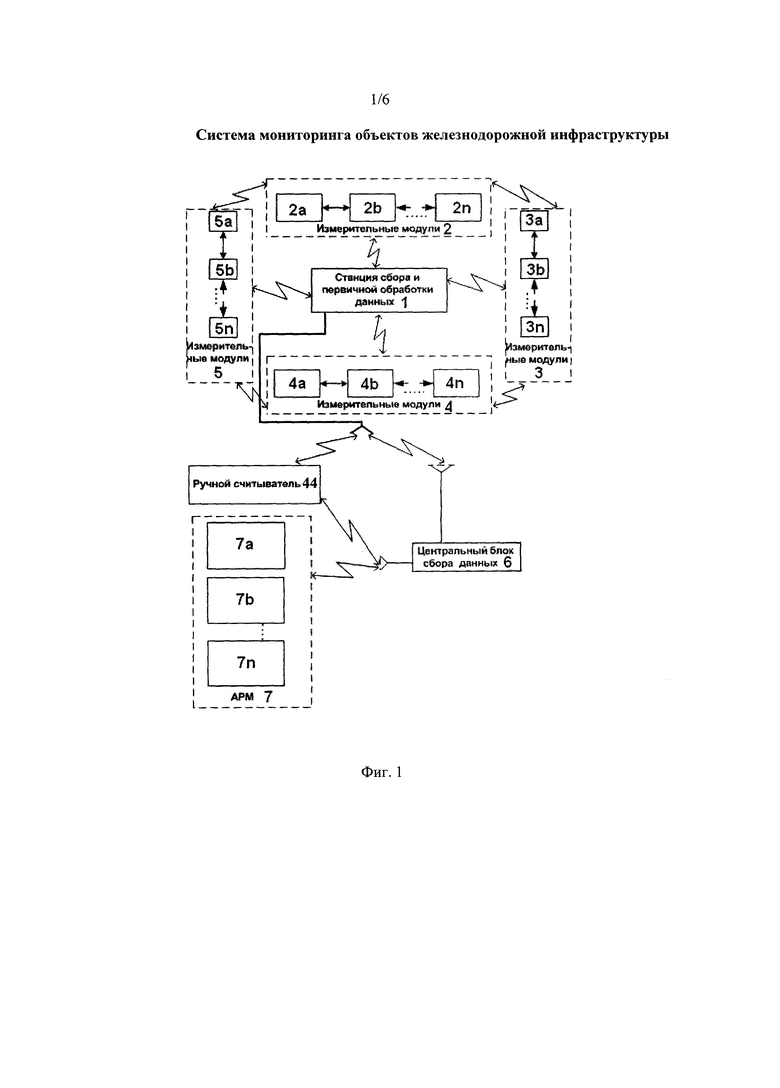
Фиг. 1 - Структурная схема системы мониторинга объектов железнодорожной инфраструктуры.
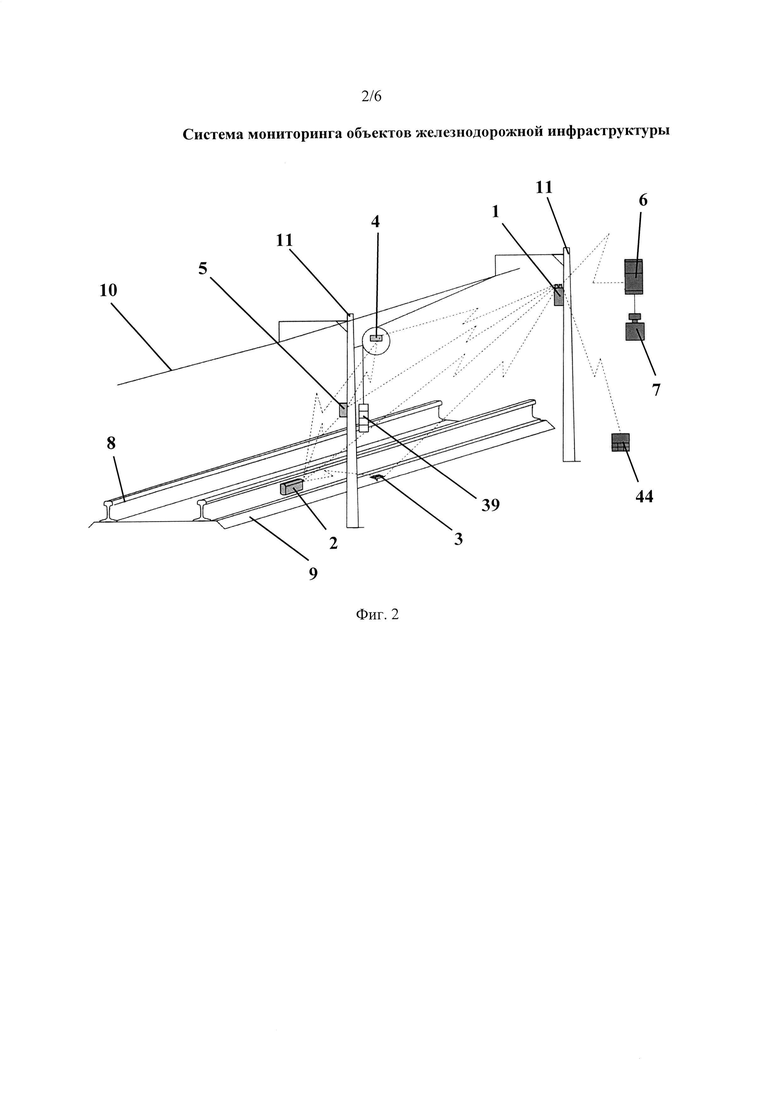
Фиг. 2 - Схема расположения элементов системы.
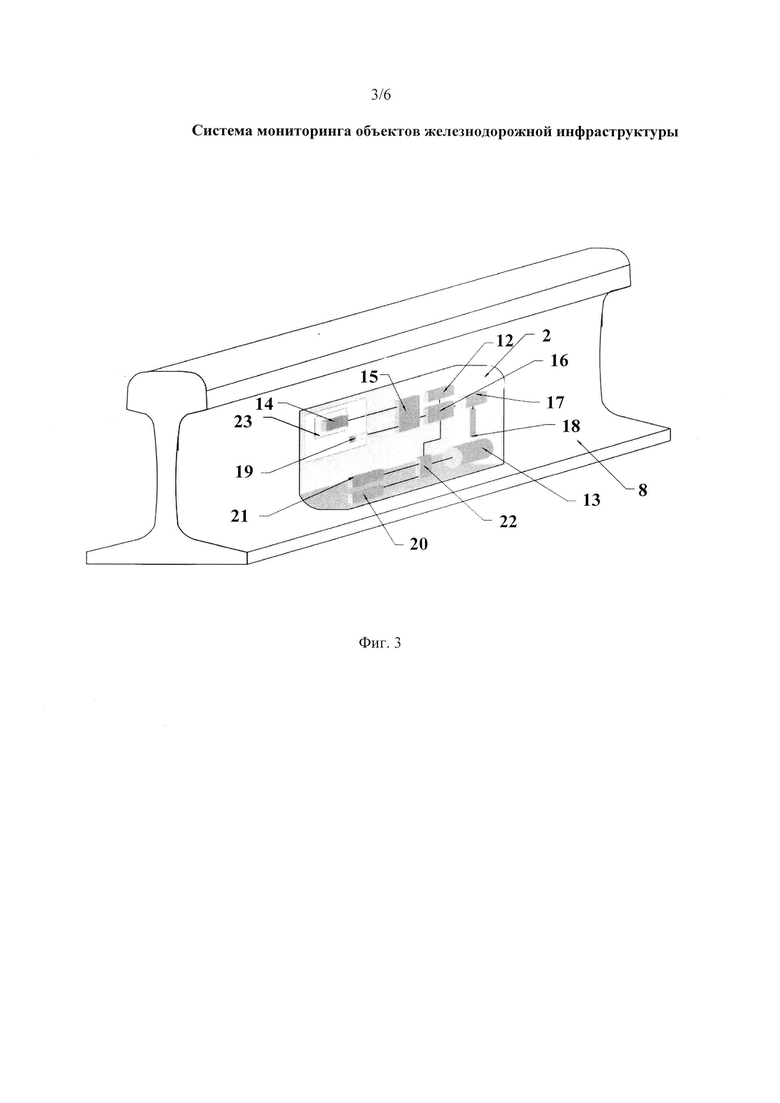
Фиг. 3 - Измерительный модуль, предназначенный измерения удлинения рельса.
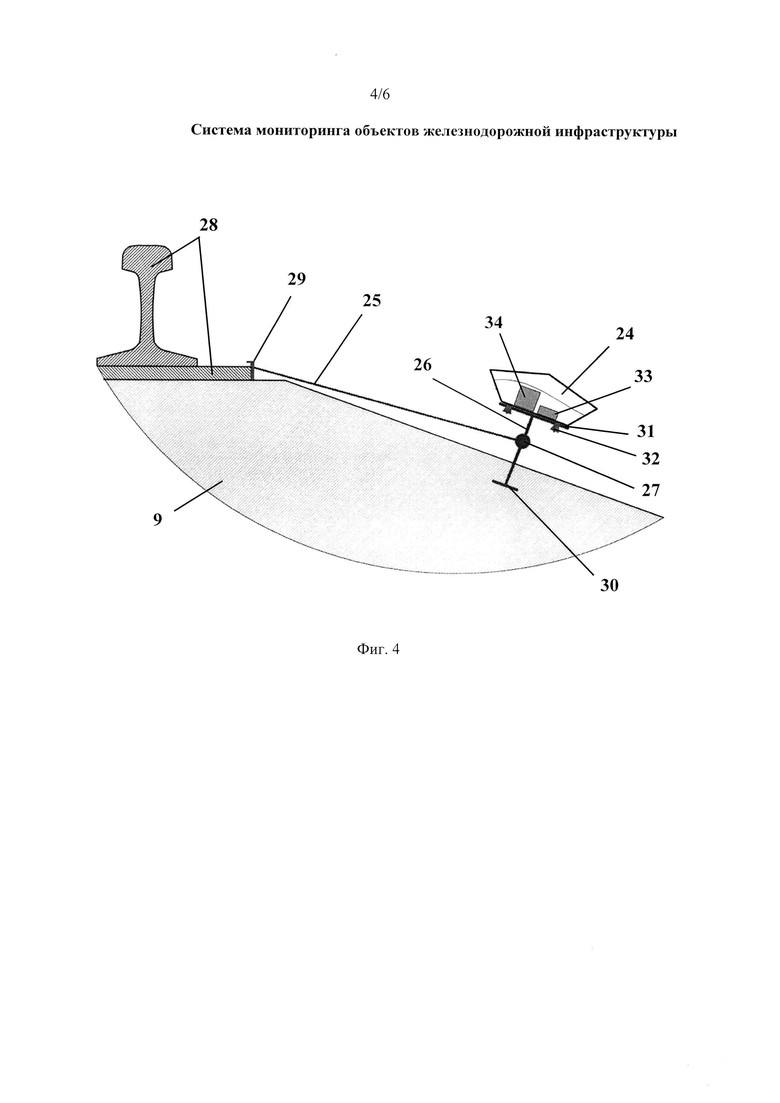
Фиг. 4 - Измерительный модуль, предназначенный для измерения сдвига земляного полотна.
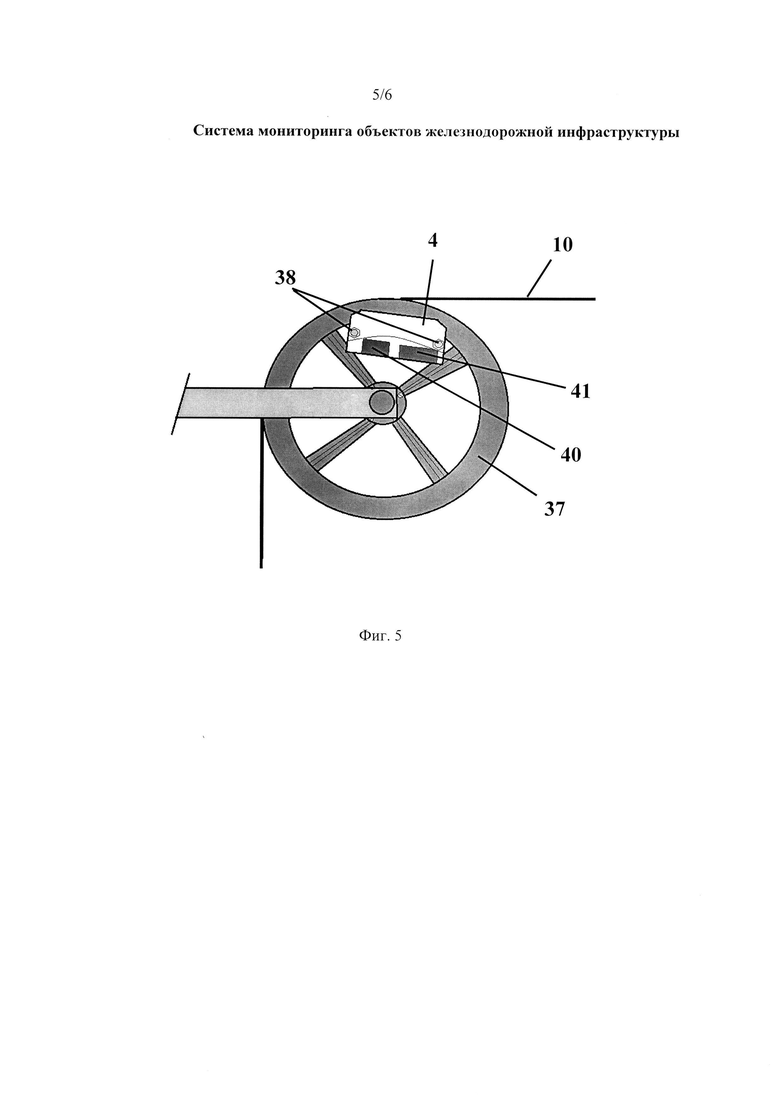
Фиг. 5 - Измерительный модуль, предназначенный для измерения натяжения контактной сети.
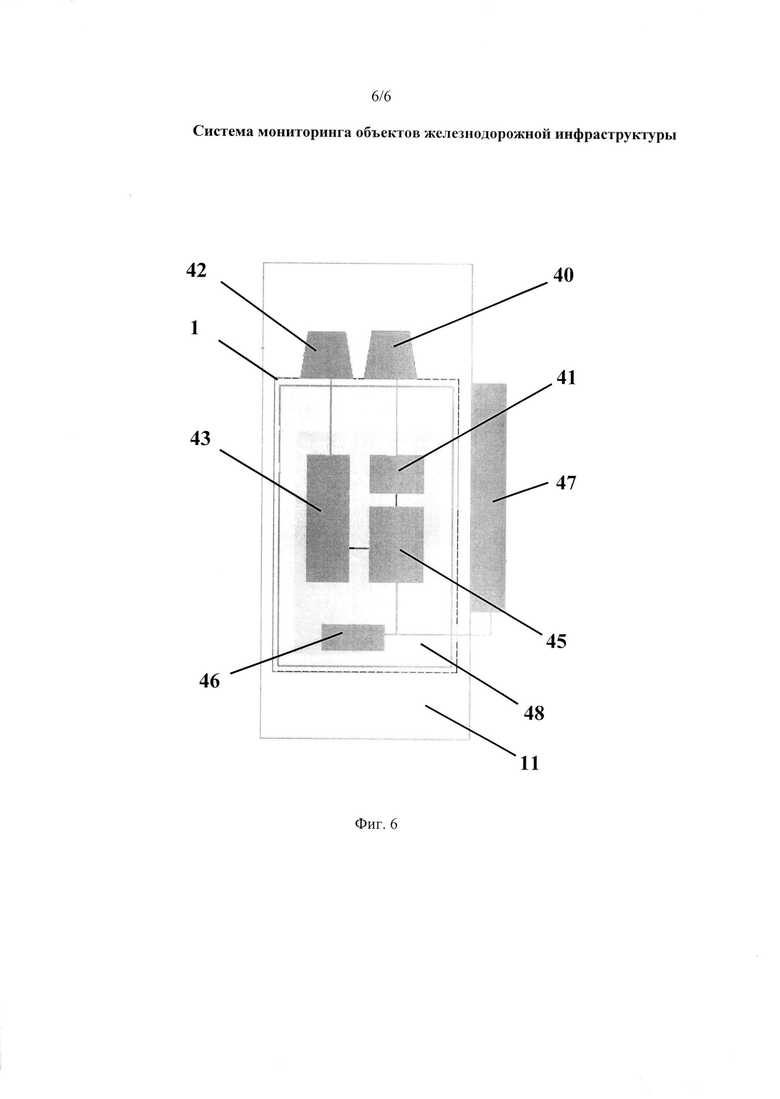
Фиг. 6 - Станция сбора и первичной обработки данных.
Система мониторинга объектов железнодорожной инфраструктуры (Фиг. 1-6) содержит, по меньшей мере, одну станцию 1 сбора и первичной обработки данных (далее - станция) и связанные с ней и между собой посредством радиосвязи измерительные беспроводные модули 2 (а, b, … n), 3 (а, b, … n), 4 (а, b, … n), 5 (а, b, … n) (далее - модули), размещенные в критических местах контролируемых объектов железнодорожной инфраструктуры, центральный блок 6 сбора данных (далее - центральный блок), связанный со станцией 1, по меньшей мере, одно автоматизированное рабочее место (АРМ) 7 (а, b, …, n), связанное с центральным блоком 6.
Модули 2-5 выполнены с возможностью осуществления измерения удлинения рельса 8 (Фиг. 3), сдвига земляного полотна 9 (Фиг. 4), натяжения контактной сети 10 (Фиг. 5), наклона опоры 11 контактной сети 10, соответственно.
Каждый модуль 2 (а, b, … n) (Фиг. 3), предназначенный для измерения удлинения рельсов 8, состоит из энергонезависимой памяти 12, внутреннего источника 13 питания, тензометрического многоосевого датчика 14 силы, аналого-цифрового преобразователя 15, микропроцессора 16, приемопередатчика 17 с антенной 18 для связи со станцией 1, датчика 19 температуры рельса 8 (здесь и далее под словом «рельс» имеется в виду контролируемый рельс), автономного источника 20 питания (необязательно), соединенных с внутренним источником 13 питания. Кроме того, каждый модуль 2 может содержать совместимый приемник 21, также соединенный с внутренним источником 13 питания и выполненный с возможностью осуществления беспроводной подзарядки внутреннего источника 13 питания, например, по технологии индукционной передачи энергии.
Тензометрический многоосевой датчик 14 силы содержит два тензорезистора (на чертеже не показано), которые выполнены с возможностью расположения, соответственно, продольно и поперечно рельсу 8.
Автономный источник 20 питания, в случае его наличия, предназначен для постоянной подзарядки внутреннего источника 13 питания и выполнен в виде виброэлектрического преобразователя, например, пьезоэлектрического генератора. В качестве внутреннего источника 13 питания применяют, например, аккумуляторную батарею.
Каждый модуль 2 может содержать блок 22 управления автономным источником 20 питания и переключатель (на чертеже не показано).
Все элементы каждого модуля 2, кроме тензометрического датчика 14 и датчика 19 температуры рельса 8, расположены и зафиксированы в герметичном контейнере, представляющим собой цельную конструкцию, выполненную из высокопрочного и влагоустойчивого пластика с образованными полостями для размещения элементов модуля 2, после монтажа которых, полости заполняют герметичным материалом. Контейнер выполнен с возможностью закрепления на шейке рельса 8, например, с помощью, струбцины (на чертеже не показано) или клея-герметика. При этом в стенке контейнера, прилегающей к шейке рельса 8, выполнено углубление, в котором расположен тензометрический датчик 14, размещенный на металлической пластине 23, которая крепится к шейке рельса 8 сваркой, и датчик 19 температуры рельса, который выполнен с возможностью крепления к шейке рельса 8 напрямую.
Число модулей 2, соединенных между собой, может варьироваться в зависимости от длины контролируемого рельса 8. Так, например, экспериментально установлено, что необходимое минимальное количество модулей 2 на 800 метровый рельс 8 (на прямом участке пути) для качественного контроля за рельсами 8 составляет 6-8 штук, поскольку зона чувствительности тензометрических датчиков 14 около 150-250 м.
Каждый модуль 3 (а, b, … n) (Фиг. 4), предназначенный для измерения сдвига земляного полотна 9, содержит элемент, чувствительный к деформации полотна 9 контролируемого пути, соединенный с ним измерительный блок 24.
Элемент, чувствительный к деформации полотна 9 контролируемого пути, образован из двух соединенных друг с другом стержней, один из которых - основной стержень 25, а второй - опорный стержень 26, и шарнира 27.
Основной стержень 25 одним своим концом прикреплен к шарниру 27, а другой его конец выполнен с возможностью прикрепления к рельсо-шпальной решетке 28 контролируемого пути, например, с помощью специально разработанного крепления 29, состоящего из стяжки и болтов. При этом основной стержень 25 может быть выполнен составным, например, из двух стержней (на чертеже не показано), соединенных шарниром (на чертеже не показано).
Опорный стержень 26 одним своим концом через шарнир 27 закреплен в земляном полотне 9 контролируемого пути, например, путем закапывания его стойки 30 и плотного утрамбовывания землей, песком, гравием, а на другом его конце имеется площадка 31, на которой установлен измерительный блок 24, например, с помощью болтов 32.
Измерительный блок 24 соединен с помощью беспроводной связи со станцией 1.
Измерительный блок 24 включает внутренний источник (на чертеже не показано) питания, энергонезависимую память (на чертеже не показано), микроконтроллер (на чертеже не показано), приемопередатчик (на чертеже не показано) с антенной (на чертеже не показано) для связи со станцией 1, соединенные с микроконтроллером (на чертеже не показано) датчик 33 температуры и датчик 34 состояния элемента, чувствительного к деформации земляного полотна 9.
Датчик 33 температуры предназначен для измерения температуры площадки 31 и соответственно опорного стержня 26 и основного стержня 25. Его наличие позволяет скорректировать данные измерений с учетом деформации стержней из-за изменения их температур.
Датчик 34 выполнен с возможностью измерения углов поворота опорного стержня 26 и представляет собой, например, G-сенсор, снабженный акселерометром.
Все стержни 25 и 26, шарнир 27 и площадка 31 выполнены металлическими.
В качестве внутреннего источника (на чертеже не показано) питания применяют, например, аккумуляторную батарею.
Все элементы измерительного блока 24 расположены и зафиксированы в герметичном контейнере, представляющим собой цельную конструкцию, выполненную из высокопрочного и влагоустойчивого пластика с образованными полостями для размещения элементов блока 24, после монтажа которых, полости заполняют герметичным материалом.
Число измерительных модулей 3, соединенных между собой, может варьироваться в зависимости от длины контролируемой насыпи земляного полотна 9 вдоль рельса. Так, например, экспериментально установлено, что максимальное количество модулей 3 на 100 метровый участок вдоль рельса может составлять 20 шт. (на прямом участке пути).
Каждый модуль 4 (а, b, … n) (Фиг. 5), предназначенный для измерения натяжения контактной сети 10, включает внутренний источник (на чертеже не показано) питания, энергонезависимую память (на чертеже не показано), микроконтроллер (на чертеже не показано), приемопередатчик (на чертеже не показано) с антенной (на чертеже не показано) для связи со станцией 1, соединенные с микроконтроллером (на чертеже не показано) датчик 35 температуры и датчик 36 технического состояния провода контактной сети 10, закрепленного на опорах 11 контролируемой контактной сети 10.
Датчик 35 температуры предназначен для измерения температуры внутри измерительного модуля 4.
Модуль 4 выполнен с возможностью его установки на подвижном ролике 37 компенсаторной подвески упомянутого провода, например, с помощью винтов 38. Датчик 36 технического состояния провода представляет собой датчик измерения углов поворота ролика 37. При этом модуль 4 может быть установлен в ролик 37 компенсаторной подвески несущего и/или контактного провода. На конце провода, идущего через ролик 37, закреплен груз 39 компенсатора.
В качестве внутреннего источника (на чертеже не показано) питания применяют, например, аккумуляторную батарею.
Все элементы модуля 4 расположены и зафиксированы в герметичном контейнере, представляющим собой цельную конструкцию, выполненную из высокопрочного и влагоустойчивого пластика с образованными полостями для размещения элементов модуля, после монтажа которых, полости заполняют герметичным материалом.
Число измерительных модулей 4 определяется исходя из 1-2 шт. на один анкерный участок (максимально 1600 м), и в зависимости от общей длины контролируемого участка контактной сети 10.
Каждый модуль 5 (а, b, … n), предназначенный для измерения наклона опоры 11 контактной сети 10, включает внутренний источник (на чертеже не показано) питания, энергонезависимую память (на чертеже не показано), микроконтроллер (на чертеже не показано), приемопередатчик (на чертеже не показано) с антенной (на чертеже не показано) для связи со станцией 1, соединенные с микроконтроллером (на чертеже не показано) датчик температуры и датчик (на чертеже не показано) измерения углов отклонения опоры 11 относительно ее первоначальной установки (например, G-сенсор).
Датчик (на чертеже не показано) температуры предназначен для измерения температуры внутри измерительного модуля 5.
Модуль 5 выполнен с возможностью его установки на контролируемой опоре 11 на высоте не менее 3 м, например, с помощью винтов (на чертеже не показано) или металлического хомута (на чертеже не показано).
В качестве внутреннего источника (на чертеже не показано) питания применяют, например, аккумуляторную батарею.
Все элементы измерительного модуля 5 расположены и зафиксированы в герметичном контейнере, представляющем собой цельную конструкцию, выполненную из высокопрочного и влагоустойчивого пластика с образованными полостями для размещения элементов модуля 5, после монтажа которых, полости заполняют герметичным материалом.
Число измерительных модулей 5 определяется исходя из расчета по 1 шт. на каждую опору 11, контроль за которой нужно установить.
Каждая станция 1 сбора и первичной обработки данных выполнена с возможностью принимать информацию от измерительных модулей 2-5 и включает антенну 40 и приемопередатчик 41 для связи с измерительными модулями 2-5, антенну 42 и приемопередатчик 43 для связи с блоком 6 напрямую, антенну (на чертеже не показано) и приемопередатчик (например, Bluetooth модуль) (на чертеже не показано) для связи с ручным считывателем 44 (при его наличии), микропроцессор 45, внутренний источник 46 питания и соединенный с ним автономный источник 47 питания, в качестве которого применен ветряной генератор или солнечная батарея. Все элементы станции 1 расположены и зафиксированы на монтажной плите 48, которая прикреплена к задней стенке герметичного корпуса, закрытого крышкой, изготовленного из металла или высокопрочного и влагоустойчивого пластика и выполненного с возможностью закрепления на путевом столбе 11 (опоре), расположенного в непосредственной близости к контролируемому участку железнодорожного пути.
Заявляемая система может включать ручной считыватель (на чертеже не показано). При этом ручной считыватель 44, выполненный с возможностью получать информацию от станции 1 посредством беспроводной радиоволновой связи малого радиуса действия с низким энергопотреблением, например Bluetooth, состоит из микропроцессора (на чертеже не показано), внутренней памяти (на чертеже не показано), приемопередатчика (на чертеже не показано) для связи со станцией 1, клавиатуры (на чертеже не показано) и дисплея (на чертеже не показано). Ручной считыватель 44 предназначен для получения информации со станции 1, которая осуществляет сбор данных с каждого измерительного модуля 2-5. Ручной считыватель 44 выполнен с возможностью получения информации, обработки ее с помощью специального установленного программного обеспечения, отображения на экране дисплея (на чертеже не показано) в удобном и понятном для сотрудника железной дороги виде. Причем ручной считыватель 44 имеет возможность считывать и отображать информацию как за заданный период времени наблюдений, так и позволяет получать и отображать информацию в режиме реально времени (с частотой 1 Гц, т.е. 1 раз в секунду). Кроме того, ручной считыватель 44 при необходимости можно подключить к центральному блоку 6 сбора и обработки и передать на него все полученный от станции 1 данные. Кроме того, ручной считыватель 44 может применяться при первоначальной установке системы для оперативного контроля правильности приходящих данных (пуско-наладка.)
Центральный блок 6 сбора данных представляет собой сервер, в котором происходит сбор, накопление, обработка и анализ измерительных данных, полученных от каждого измерительного модуля 2-5 и включает вычислительный блок (на чертеже не показано), базу (на чертеже не показано) данных, блок (на чертеже не показано) управления и приемопередатчик (на чертеже не показано), соединенный посредством радиоканала с приемопередатчиками 43 станций 1. Имеется по меньшей мере одно автоматизированное рабочее место 7 (а, b, …, n), связанное с центральным блоком 6 сбора данных и предназначенное для оператора, осуществляющего слежение за работой системы и анализирующей ее выходные данные.
Система работает следующим образом.
Для комплексного мониторинга объектов инфраструктуры железнодорожного пути элементы системы транспортируют к месту проведения измерений и устанавливают на соответствующих местах.
Непосредственно перед установкой измерительных модулей 2, предназначенных для измерения удлинения рельса 8, определяют сечения, по которым будут производиться измерения. В этих сечениях к рельсу 8 точечной сваркой («холодная пайка») прикрепляют металлическую пластину 23, на которой предварительно закреплен тензометрический датчик 14. Датчик 19 температуры рельса 8 закрепляют так, чтобы он контактировал непосредственно с рельсом 8, этим достигается и высокая точность измерений. После этого производят крепление самого контейнера беспроводного модуля 2 и соединяют его с датчиком 19 температуры рельса 8 и тензометрическим датчиком 14. Данные измерений от каждого модуля 2 передаются в станцию 1, обрабатываются там и передаются сразу в центральный блок 6 сбора или на ручной считыватель (на чертеже не показано), а затем в центральный блок 6.
Непосредственно перед установкой измерительных модулей 3, предназначенных для измерения сдвига земляного полотна 9 насыпи железнодорожного пути, определяют сечения, по которым будет производиться измерение параметров состояния контролируемого земляного полотна 9. В этих сечениях устанавливают элемент, чувствительный к деформации земляного полотна 9, и прикрепляют к нему измерительный блок 24. С помощью датчика 33 отслеживают изменение температуры стержней 25 и 26 относительно их температуры в первоначальном положении и определяют изменение длины стержня 25 из-за влияния температуры. Затем эти данные используют для составления калибровочных таблиц.
При возникновении подвижек земляного полотна 9 происходит поворот опорного стержня 26 относительно шарнира 27, при этом на основании данных измерений датчика 34 отслеживают изменения координат в двух взаимно перпендикулярных плоскостях относительно первоначальной установки и с помощью калибровочных данных определяют величины подвижек земляного полотна 9 такие, как боковое смещение и смещение вниз насыпи земляного полотна 9 (просадка).
При этом боковое смещение L (отсчитывается вдоль земляного полотна 9) определяется за счет измерения угла поворота α опорного стержня 26 датчиком 34 и равен: L=k*R*tgα, где R - длина части опорного стержня 26 до места крепления с основным стержнем 25, k - коэффициент, определяемый из калибровочных данных, соответствующий изменению длины опорного стержня 26 в результате температурного изменения.
Смещение вниз насыпи земляного полотна 9 (просадка) h вычисляется как: h=L/sinβ, где β - угол наклона насыпи относительно горизонта.
Пример вычислений при изменении угла поворота опорного стержня 26 на 1 градус (при R=100 мм, а k=1, т.к. предположим, что температура стержня 26 не менялась за исследуемый период времени): L=1*100*0,017=1,7 мм, h=1,7/sin20°=5 мм.
Данные измерений от каждого измерительного модуля 3 передаются в станцию 1, обрабатываются там и передаются сразу в центральный блок 6 сбора или на ручной считыватель (на чертеже не показано), а затем в центральный блок 6. По полученным данным, используя калибровочные таблицы, определяют точные подвижки земляного полотна 9 относительно шпальной решетки 28 железнодорожного пути. На основании результатов измерений делают выводы о текущем состоянии полотна 9, а проводя периодические измерения, контролируют его состояние с течением времени.
Непосредственно перед установкой измерительных модулей 4, предназначенных для измерения натяжения контактной сети 10, определяют критические анкерные участки и соответственно компенсаторные ролики 37, в которых непосредственно будут установлены измерительные модули 4. С помощью датчика 40 отслеживают изменение температуры внутри корпуса измерительного модуля 4 относительно его температуры в первоначальном положении и определяют расчетное значение деформации провода в зависимости от изменения этой температуры.
При возникновении деформации провода происходит поворот ролика 37 на определенный угол, при этом на основании данных измерений датчика 41 отслеживают этот угол поворота ролика 37.
Данные измерений от каждого измерительного модуля 4 передаются в станцию 1, обрабатываются там и передаются сразу в центральный блок 6 сбора или на ручной считыватель (на чертеже не показано), а затем в центральный блок 6. По полученным данным определяют величину сжатия или растяжения контролируемого провода, например, следующим образом.
Расстояние от груза 39 до земли Втеор. определяется по формуле
Втеор.=B0+(Kл*Lан)/2*Ткорп., где
В0 - справочная величина необходимого для безопасной эксплуатации контактной сети 10 расстояния при Ткорп.=0°С;
Kл - коэффициент линейного теплового расширения провода (медь или сталь);
Lан - длина анкерного участка (длина провода);
Ткорп. - температура корпуса (примерно равная температуре окружающей среды).
Величина деформации L провода в зависимости от изменения угла поворота ролика 37 определяется по формуле
L=(πR*£)/360, где
R - радиус ролика, £ - угол поворота ролика 37.
Таким образом, текущее расстояние от груза 39 до земли Втекущ., определяется следующим образом:
Втекущ.=В0+L.
На основании результатов измерений делают выводы о текущем состоянии провода, а проводя периодические измерения, контролируют его состояние с течением времени. Основной задачей такого контроля является не допустить такого растяжения провода, при котором груз 39 компенсатора окажется ниже, чем за 20 см от земли, и его сжатия, при котором груз 39 окажется выше, чем за 20 см до ролика 37. Поэтому при |Втекущ.-Втеор.|<0,2 м - блок 6 сбора и обработки выдает информационный сигнал, например, на отображающем дисплее (на чертеже не показано), специальных светодиодных индикаторах (на чертеже не показано) или устройстве (на чертеже не показано) вывода информации на бумаге (принтер, факс), о том, что деформация провода в пределах нормы (например, в словесной форме или в виде цветового сигнала зеленого цвета). При 0,2<|Втекущ.-Втеор.|<0,4 - выдается предупреждающий сигнал (например, в словесной форме или в виде цветового сигнала желтого цвета). При |Втекущ.-Втеор.|>0,4 - выдается тревожный сигнал (например, в словесной форме или в виде цветового сигнала красного цвета), который свидетельствует о возможном обрыве, провисе или другом нештатном событии, требующем анализа и устранение проблемы.
Пример расчета при Kл=17*10-6°С-1 (медь), В0=151 см, Laн=630 м, Ткорп=30°С.
Тогда Втеор=B0+(Kл*Lан)/2*Tкорп=151+(17*10-6*630)/2*30=151,16 см.
Поворот ролика 37 (угол изменения) составил 40°, т.е. £=40°, R=10 см.
Деформация провода L=(πR*£)/360=(3,14*10*40)/360=3,5 см, соответственно Втекущ.=В0+L=151+3,5=154,5 см.
Осуществляют сравнительный анализ и определяют состояние деформации на предмет безопасности |Втекущ.-Втеор.|=154,5-151,16=3,34 см, это <0,2 м, следовательно, деформация провода контактной сети 10 в пределах нормы.
Непосредственно перед установкой измерительных модулей 5, предназначенных для измерения наклона опоры 11 контактной сети 10, определяют те опоры 11, состояние которых визуально определяется как неустойчивое (например, уже имеют видимое отклонение от первоначального состояния установки или имеют большие амплитуды колебаний), на которых непосредственно будут установлены измерительные модули 5. При возникновении отклонений опоры 11 от первоначального положения датчик (на чертеже не показано) измерения углов фиксирует изменения координат Χ, Y относительно первоначальной установки и выдает значение угла в градусах, на который наклонилась опора 11.
Станции 1 и ручные считыватели (при их наличии) располагают непосредственно вблизи контролируемых объектов железнодорожной инфраструктуры (рельса 8, опоры 11, участка контактной сети 10, насыпи земляного полотна 9).
Центральный блок 6 располагают, например, в серверных помещениях (на чертеже не показано) железных дорог, а связанные с ними автоматизированные рабочие места 7 располагают, например, в помещении диспетчерского центра (на чертеже не показано).
На основании результатов измерений делают выводы о текущем состоянии объектов инфраструктуры железнодорожного пути, а проводя периодические измерения, контролируют их состояние с течением времени.
При этом время проведения контроля определяется исходя из требований заказчика (РЖД) за контролем того или иного участка на определенное время, для сбора данных и понимания характера деформаций объектов. Это необходимо для принятия решения по устранению проблемы или дальнейшему наблюдению до достижения критического состояния, не позволяющего гарантировать безопасность железнодорожного движения.
Таким образом, достигается технический результат: повышение точности контроля при одновременном расширении функциональных возможностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система распределенного контроля железнодорожного пути для высокоскоростного движения | 2017 |
|
RU2671796C1 |
| Система диагностики и удаленного мониторинга усилия натяжения проводов и тросов контактной сети железной дороги | 2016 |
|
RU2631891C1 |
| Система для контроля и диагностики инфраструктуры высокоскоростного железнодорожного транспорта | 2018 |
|
RU2681779C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ КОНТАКТНОГО ПРОВОДА ЭЛЕКТРОТРАНСПОРТА | 2017 |
|
RU2750823C1 |
| Система контроля верхнего строения пути и элементов железнодорожной инфраструктуры на предмет несанкционированного воздействия | 2024 |
|
RU2831499C1 |
| Система для мониторинга состояния объектов железнодорожного транспорта | 2023 |
|
RU2807663C1 |
| МОБИЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2009 |
|
RU2438903C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ АВАРИИ СОСТАВА | 2009 |
|
RU2392149C1 |
| МОБИЛЬНЫЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2066645C1 |
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
Настоящее изобретение относится к измерительной технике, а именно к средствам контроля состояния конструкций искусственных сооружений для железнодорожного транспорта в процессе их эксплуатации, и может применяться для выявления потенциально опасных участков железнодорожного пути и его окружения. Система мониторинга объектов железнодорожной инфраструктуры содержит, по меньшей мере, одну станцию сбора и первичной обработки данных и связанные с ней и между собой посредством радиосвязи измерительные модули, размещенные в критических местах контролируемых объектов железнодорожной инфраструктуры и выполненные с возможностью осуществления измерения удлинения рельса, сдвига земляного полотна, натяжения контактной сети, наклона опоры контактной сети, центральный блок сбора данных, связанный со станцией сбора и первичной обработки данных, по меньшей мере, одно автоматизированное рабочее место, связанное с центральным блоком сбора данных. Каждый измерительный модуль включает автономный источник питания, сенсорные датчики, приемопередатчик и микроконтроллер. Каждая станция сбора и первичной обработки данных включает автономный источник питания, контроллер и приемопередатчик, соединенный посредством радиоканала с приемопередатчиками измерительных модулей. Центральный блок сбора данных включает вычислительный блок, базу данных, блок управления и приемопередатчик, соединенный посредством радиоканала с приемопередатчиками станций сбора и первичной обработки данных. В результате повышается точность контроля при одновременном расширении функциональных возможностей. 6 ил.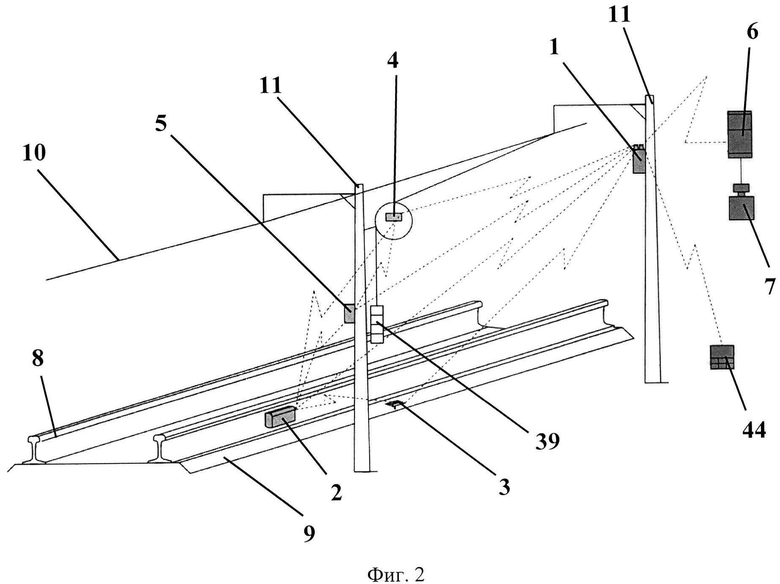
Система мониторинга объектов железнодорожной инфраструктуры, содержащая, по меньшей мере, одну станцию сбора и первичной обработки данных и связанные с ней и между собой посредством радиосвязи измерительные модули, размещенные в критических местах контролируемых объектов железнодорожной инфраструктуры, центральный блок сбора данных, связанный со станцией сбора и первичной обработки данных, по меньшей мере, одно автоматизированное рабочее место, связанное с центральным блоком сбора данных, при этом каждый измерительный модуль включает автономный источник питания, сенсорные датчики, приемопередатчик и микроконтроллер, каждая станция сбора и первичной обработки данных включает автономный источник питания, контроллер и приемопередатчик, соединенный посредством радиоканала с приемопередатчиками измерительных модулей, а центральный блок сбора данных включает вычислительный блок, базу данных, блок управления и приемопередатчик, соединенный посредством радиоканала с приемопередатчиками станций сбора и первичной обработки данных, отличающаяся тем, что измерительные модули выполнены с возможностью осуществления измерения удлинения рельса, сдвига земляного полотна, натяжения контактной сети, наклона опоры контактной сети, соответственно, причем измерительный модуль, предназначенный для измерения удлинения рельсов, выполнен с возможностью его установки на шейке контролируемого рельса и дополнительно содержит тензометрический многоосевоой датчик силы и датчик температуры рельса, измерительный модуль, предназначенный для измерения сдвига земляного полотна, выполнен с возможностью его установки в земляном полотне насыпи контролируемого пути и дополнительно включает датчик измерения углов поворота опорного стержня и датчик температуры основного стержня, измерительный модуль, предназначенный для измерения натяжения контактной сети, выполнен с возможностью его установки в подвижном ролике компенсаторной подвески контактного или несущего провода, закрепленного на контролируемой опоре, и дополнительно включает датчик измерения углов поворота подвижного ролика и датчик температуры окружающей среды, измерительный модуль, предназначенный для измерения наклона опоры контактной сети, выполнен с возможностью его установки на контролируемой опоре контактной сети и дополнительно включает датчик измерения углов отклонения опоры относительно ее первоначальной установки.
| СИСТЕМА МОНИТОРИНГА ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ ИНФРАСТРУКТУРЫ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2011 |
|
RU2450346C1 |
| Устройство для передачи и приема информации на транспортном средстве | 1988 |
|
SU1623905A1 |
| СИСТЕМА МОНИТОРИНГА НАПРЯЖЕНИЙ ДЛЯ ЖЕЛЕЗНЫХ ДОРОГ | 2007 |
|
RU2441788C2 |
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2013 |
|
RU2521095C1 |

