ОБЛАСТЬ ТЕХНИКИ
Данное техническое решение относится к области видеонаблюдения, в частности к видеонаблюдению с использованием поворотных (PTZ) камер.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В настоящее время для видеонаблюдения за большими территориями используются ставшие повсеместно распространенными поворотные камеры (PTZ), представляющие собой устройство, которое поддерживает удаленное управление направлением взгляда и зумом. PTZ-камеры активно используются при проведении видеоконференций, являясь необходимым атрибутом конференц-зала или переговорной комнаты, при построении охранных систем и других систем видеонаблюдения. Вследствие их большой распространенности на данный момент, модельный ряд камер достаточно обширен, камеры обладают различными характеристиками и стоимостью.
При использовании поворотной камеры для видеонаблюдения важной характеристикой ее функционирования является ошибка позиционирования камеры, зависит от степени износа механизма, его начальной точности, калибровки камеры.
Из уровня техники известна статья [1], в которой описываются подходы, которые применяются в решении поставленной задачи.
Синха и Поллефейс предложили способ позиционирования для PTZ-камер [2], в котором камера сначала калибруется на малом зуме, а затем внутренние параметры камеры рассчитываются при увеличении зума. Так как калибровка осуществляется дискретно от одного значения зума к другому, применяют кусочно-линейную интерполяцию для вычисления внутренних параметров. Использование данного способа обеспечивает потребность в большом количестве шагов калибровки для смягчения шума, что значительно увеличивает время работы.
Также известен способ [3] Саркиса, в котором внутренние параметры камеры находятся в зависимости от настроек объектива на основе перемещающемся методе наименьших квадратов. Тем не менее, этот метод вычислительно требовательный.
СУЩНОСТЬ
Данное техническое решение направлено на устранение недостатков, свойственных решениям, известным из уровня техники.
Техническим результатом является уменьшение ошибки позиционирования камеры и увеличение повторяемости позиционирования.
Данный технический результат достигается за счет использования промежуточных точек позиционирования, которые уменьшают эффект инерции и «перелета» необходимой позиции. При уменьшении ошибки позиционирования повышается точность позиционирования.
Еще одним техническим результатом является повторяемость результатов позиционирования. В итоге ошибка позиционирования становится систематической и одинаковой.
Способ уменьшения ошибки позиционирования PTZ-камеры, характеризующийся тем, что получают целевую позицию поворота камеры, затем определяют, по крайней мере, одну промежуточную позицию камеры и ее координаты на основе данных о целевой позиции поворота камеры, после чего последовательно поворачивают камеру в целевую позицию через вышеупомянутые промежуточные позиции.
В некоторых вариантах осуществления технического решения одну промежуточную позицию и ее координаты определяют путем проведения тестирования камеры.
В некоторых вариантах осуществления технического решения, по крайней мере, одну промежуточную позицию и ее координаты определяют исходя из представлений о способе работы и характеристиках поворотного механизма камеры.
В некоторых вариантах осуществления технического решения промежуточные точки могут быть определены через абсолютные координаты или через относительные координаты.
В некоторых вариантах осуществления технического решения количество и координаты промежуточных позиций зависят от требуемой скорости и точности позиционирования.
В некоторых вариантах осуществления технического решения относительные координаты промежуточной позиции определяются таким образом, чтобы промежуточная позиция находилась максимально близко к требуемой позиции.
В некоторых вариантах осуществления технического решения для определения ошибки позиционирования используют алгоритмы компьютерного зрения
В некоторых вариантах осуществления технического решения определяют, по крайней мере, две промежуточные позиции, причем первая позиция отличается на А по панорамному углу и углу наклона от требуемой позиции, а вторая промежуточная позиция по панорамному углу совпадает с требуемой позицией, а по углу наклона отличается на А.
В некоторых вариантах осуществления технического решения определяют, по крайней мере, две промежуточные позиции, причем первая позиция отличается на А по панорамному углу и углу наклона от требуемой позиции, а вторая промежуточная позиция по углу наклона совпадает с требуемой позицией, а по панорамному углу отличается на А.
В некоторых вариантах осуществления технического решения скорость движения из исходной точки до первой промежуточной, между промежуточными и между последней промежуточной точкой и целевой точкой могут быть различными.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Признаки и преимущества настоящего технического решения станут очевидными из приводимого ниже подробного описания и прилагаемых чертежей, на которых:
На Фиг. 1 - приведена блок-схема заявляемого способа;
На Фиг. 2 - приведена блок-схема примера реализации заявляемой системы;
На Фиг. 3 - приведен пример реализации технического решения с одной промежуточной точкой.
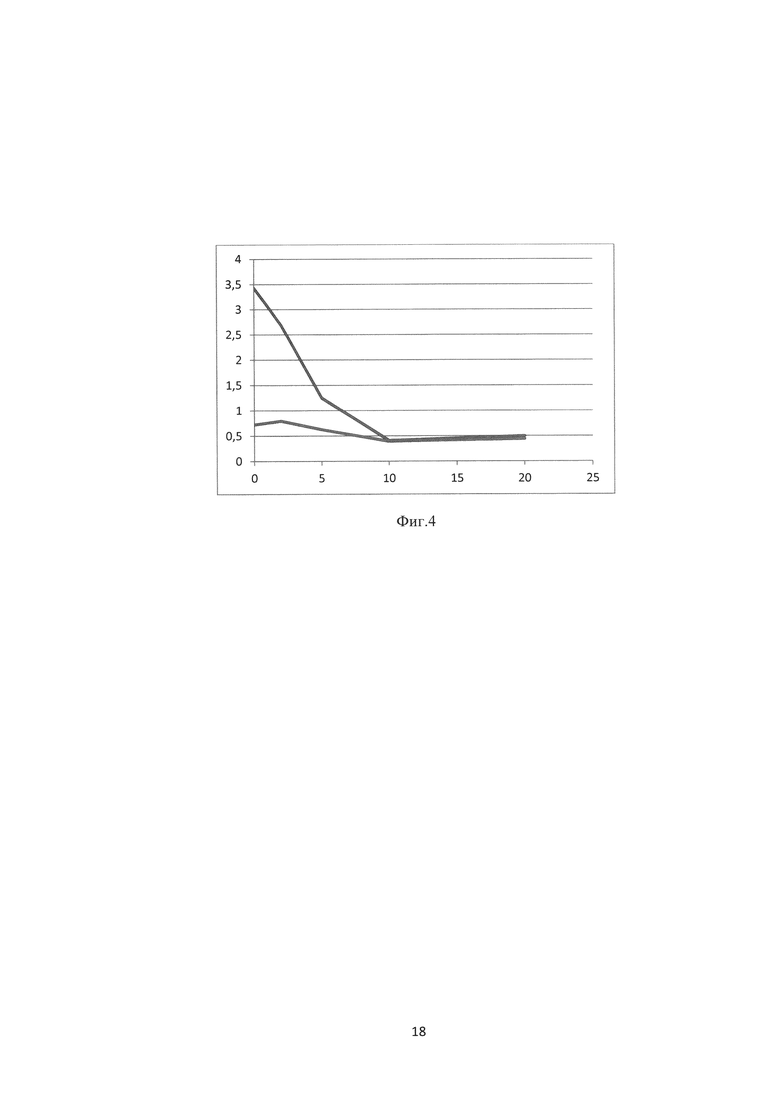
На Фиг. 4 - приведен график, на котором показана экспериментальная зависимость ошибки позиционирования по вертикали и горизонтали в пикселях от расстояния промежуточной точки от целевой точки в градусах.
ПОДРОБНОЕ РАСКРЫТИЕ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Ниже будут описаны понятия и определения, необходимые для подробного раскрытия осуществляемого технического решения.
Панорамный угол (угол прецессии, Pan) - один из углов Эйлера, описывающий поворот объекта вокруг оси Z (более подробно в источнике [9]). Данный угол соответствует повороту объекта в собственной горизонтальной плоскости.
Угол наклона (угол нутации, Tilt) - один из углов Эйлера, описывающий поворот объекта вокруг оси Y (более подробно в источнике [9]). Данный угол соответствует повороту объекта в собственной вертикальной плоскости.
Ошибка позиционирования - разница между целевой позицией камеры и фактическим положением камеры после позиционирования в целевую позицию. Выражается двумя углами: панорамным (соответствующим разнице между панорамными углами фактической и целевой позиции) и углом наклона (соответствующим разнице между углами наклона фактической и целевой позиции).
Повторяемость результата - характеристика, отражающая вероятность повторения результата эксперимента при соблюдении определенного набора начальных условий.
Повторяемость результата позиционирования - характеристика, отражающая вероятность достижения одних и тех же величин ошибки позиционирования при сохранении целевой позиции камеры и изменении исходной позиции.
Компьютерное зрение - теория и технология создания машин, которые могут производить обнаружение, слежение и классификацию объектов.
Алгоритмы компьютерного зрения это алгоритмы обработки графических и видео данных с целью выявления полезной информации, например описанные в источнике информации Форсайт, Д., and Д. Понс. "Компьютерное зрение. Современный подход. Вильяме" Москва 928 (2004).
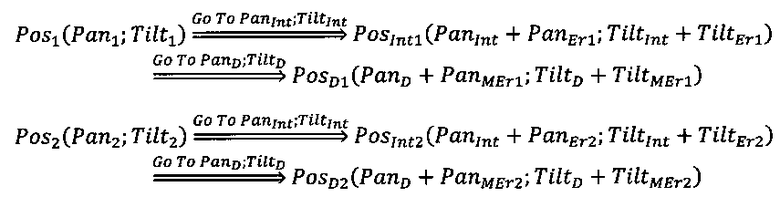
В стандартном режиме позиционирования при необходимости повернуть камеру из исходной позиции в целевую камере посылается команда поворота:
 ,
,
где Pos1(Pan1; Tilt1) - исходная позиция камеры, которая характеризуется панорамным углом Pan1 и углом наклона Tilt1, PosD1(PanD+PanEr1; TiltD+TiltEr1) - позиция камеры при движении камеры из точки 1 в целевую позицию, она отличается от требуемой целевой позиции PosD(PanD; TiltD) на величину ошибки позиционирования.
При этом поворот в ту же целевую позицию из другого исходного положения в общем случае приводит к другим ошибкам позиционирования:
 ,
,
Pos2(Pan2; Tilt2) - вторая начальная позиция ориентации камеры, отличающаяся от первой значениями панорамного угла и угла наклона, PosD2(PanD+PanEr2; TiltD+TiltEr2) - ориентация камеры при приходе в целевую позицию из исходной позиции 2, с другими значениями ошибки по панорамному углу и углу наклона. Получившаяся позиция так же отличается от требуемого целевого направления обзора камеры.
При таком подходе разброс значений PanEr; TiltEr может достигать существенных значений, причем для камер с различными механизмами поворота ошибка будет составлять от 0,05 градуса до 0,5 градусов. Различные механизмы поворота описаны в [4].
В данном техническом решении предлагается введение, по крайней мере, одной дополнительной позиции через которую проходит камера перед достижением целевой позиции, позволяющее уменьшить ошибку позиционирования:
Аналогично предыдущему:
Pos1(Pan1; Tilt1) - первая исходная позиция.
PosInt1(PanInt+PanEr1; TiltInt+TiltErl) - промежуточная позиция с собственной ошибкой позиционирования при перепозиционировании из первой исходной позиции.
PosD1(PanD+PanMEr1; TiltD+TiltMErl) - конечная (целевая) позиция при перепозиционировании из промежуточной позиции.
Pos2(Pan2; Tilt2) - вторая исходная позиция, отличающаяся от первой исходной позиции.
PosInt2(PanInt+PanEr2; TiltInt+TiltEr2) - промежуточная позиция с собственной ошибкой позиционирования при перепозиционировании из второй исходной позиции.
PosD2(PanD+PanMEr2; TiltD+TiltMEr2) - конечная позиция при приходе из промежуточной позиции.
Т.к. в конечную точку камера позиционируется из промежуточной точки, координаты которой в двух описываемых маршрутах движения могут отличаться не более, чем на ошибку позиционирования (от 0,05 до 0,5 градуса), конечная ошибка PanMEr; TiltMEr будет существенно меньше, и для камер с точностью позиционирования 0,05 градуса может составлять уже около 0,01 градуса.
Необходимый эффект достигается ценой некоторой потери времени, необходимого на промежуточное позиционирование и контроль установки поворотного механизма в промежуточную позицию. Однако для многих задач точность, которая достигается за счет уменьшения ошибки позиционирования, является приоритетным фактором. Кроме того, современные камеры обладают очень большой скоростью позиционирования, что сводит временные затраты на дополнительное позиционирование к минимуму.
Способ повышения точности позиционирования PTZ-камеры, характеризующийся тем, что:
Получают целевую позицию поворота камеры.
Под целевой позицией понимается позиция камеры, задаваемая программой управления камерой или оператором.
Определяют по крайней мере одну промежуточную позицию камеры и ее координаты на основе данных о целевой позиции поворота камеры.
Промежуточные позиции и их координаты определяют путем проведения тестирования камеры, либо на основании представлений об устройстве поворотного механизма камеры. При проведении тестирования для получения оптимальных параметров промежуточных точек могут использоваться алгоритмы глобальной оптимизации [6, 7, 8].
Промежуточные позиции могут быть определены через абсолютные координаты или через относительные координаты.
Количество промежуточных позиций зависит от требуемой скорости и точности позиционирования. Чем выше требуется скорость позиционирования, тем меньше должно быть промежуточных точек позиционирования, при этом, в некоторых случаях может быть достаточно одной промежуточной точки позиционирования. Также из общих соображений очевидно, что увеличение количества промежуточных точек сверх определенного предела не приведет к увеличению точности позиционирования.
Скорость и точность позиционирования могут задаваться автоматически или оператором в зависимости от конкретного способа применения камеры.
В некоторых вариантах определения промежуточных точек строят автоматическую процедуру вычисления получаемой точности позиционирования при заданной скорости и наоборот, получаемой скорости позиционирования при необходимой точности.
В частном случае, тестирование с целью определения промежуточных позиций может происходить следующим образом.
1. Случайным образом определяют целевую позицию камеры.
2. Камеру отправляют в произвольном направлении и возвращают в целевую позицию по определенному алгоритму позиционирования, проводя замер точности и скорости позиционирования.
3. Изменяют алгоритм позиционирования и снова проводят измерения точности позиционирования.
При изменении алгоритма позиционирования подразумевается как выбор другого алгоритма, так и настройка текущего действующего.
При этом могут использоваться различные стратегии изменения алгоритма позиционирования, в том числе наиболее простые. Приведем пример простой стратегии определения алгоритма позиционирования: выбирают одну промежуточную позицию, отличающуюся от целевой по панорамному углу и углу наклона на величину А. Затем при помощи алгоритма глобальной оптимизации [6, 7, 8] для одномерной функции выбирают такое значение А, которое соответствует минимальной ошибке позиционирования.
Для определения ошибки позиционирования могут использоваться алгоритмы компьютерного зрения, например, реализующие выделение опорных точек на двух кадрах и определение смещения опорных точек между кадрами. Поиск опорных точек может быть произведен, как указано в источнике информации [5]. В частном случае, могут использоваться два изображения - первое, полученное в целевой точке в начальный момент времени, и второе, полученное в целевой позиции после позиционирования из промежуточной позиции. Далее эти изображения сравниваются, и определяется ошибка позиционирования.
В качестве алгоритма компьютерного зрения может применяться, но не ограничиваясь, следующий алгоритм. Например, сдвиг можно определить корреляционным способом, т.е. при определении сдвига между двумя изображениями, взять центр первого из изображений, и посчитать двумерную корреляцию этого элемента одного изображения со вторым изображением, при этом координаты максимального значения корреляции будут соответствовать положению такого же участка как центр первого изображения на втором изображении, его смещение относительно центра изображения и будет сдвиг изображения, на основании которого можно определить ошибку позиционирования.
В качестве алгоритмов компьютерного зрения также могут использоваться алгоритмы линейной (нелинейной) фильтрации, поиска линий, поиска углов, границ и т.д.
Последовательно поворачивают камеру в целевую позицию через вышеупомянутые промежуточные позиции.
После получения целевой позиции и вычисления набора промежуточных позиций, камеру сначала поворачивают в первую промежуточную позицию, затем, при ее наличии, во вторую, и так далее. Последним шагом будет поворот камеры в целевую позицию.
В одном из вариантов реализации, данное техническое решение может быть выполнено в виде системы повышения точности позиционирования PTZ-камеры, включающей: PTZ-камеру, одно или более устройств обработки данных, одно или более устройств хранения данных, одну или более программ, где одна или более программ хранятся на одном или более устройстве хранения данных и исполняются на одном и более устройстве обработки данных, причем одна или более программ включает следующие инструкции: что получают целевую позицию поворота камеры, затем определяют, по крайней мере, одну промежуточную позицию камеры и ее координаты на основе данных о целевой позиции поворота камеры, после чего последовательно поворачивают камеру в целевую позицию через вышеупомянутые промежуточные позиции.
В некоторых вариантах реализации указанный способ реализуется физически на камере.
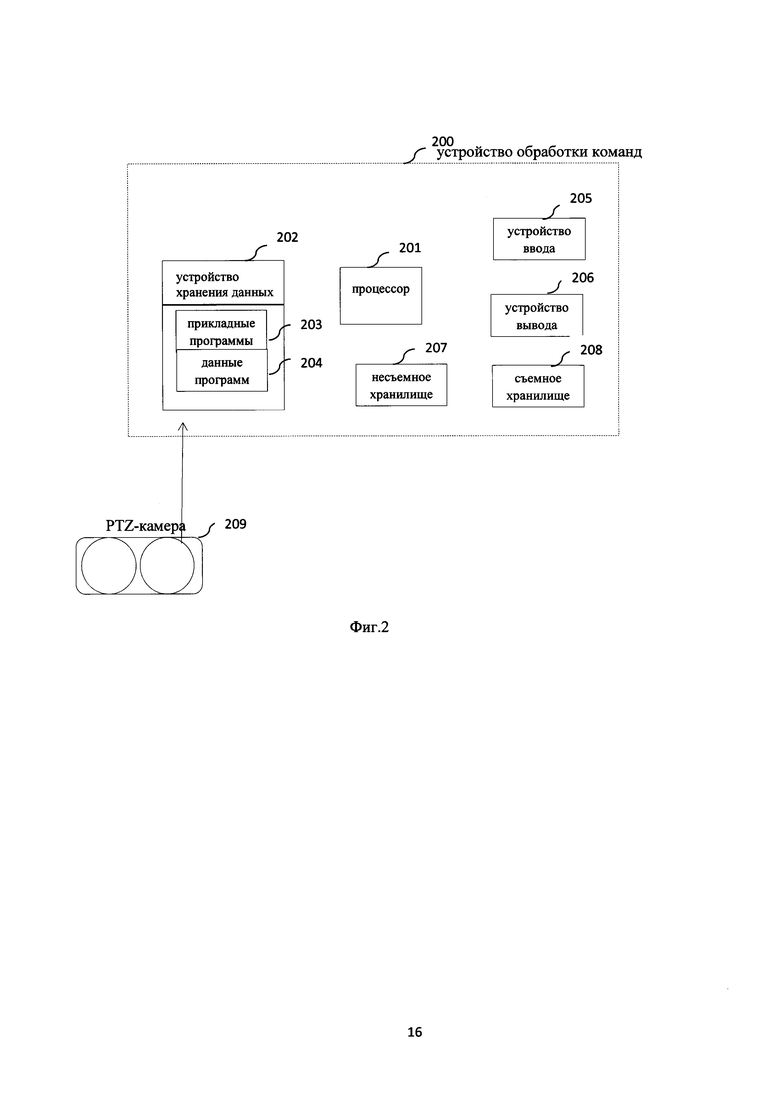
Согласно Фиг. 2, примерная система для реализации технического решения включает в себя устройство обработки данных 200. Устройство обработки данных 200 может быть сконфигурировано как клиент, сервер, мобильное устройство или любое другое вычислительное устройство, которое взаимодействует с данными в системе совместной работы, основанной на сети. В самой базовой конфигурации устройство обработки данных 200, как правило, включает в себя, по меньшей мере, один процессор 201 и устройство хранения данных 202. В зависимости от точной конфигурации и типа вычислительного устройства системная память 202 может быть энергозависимой (например, оперативное запоминающее устройство (ОЗУ, RAM)), энергонезависимой (например, постоянное запоминающее устройство (ПЗУ, ROM)) или некоторой их комбинацией. Устройство хранения данных 202, как правило, включает в себя одну или более прикладных программ 203 и может включать в себя данные 204 программ. Настоящее техническое решение как способ, описанное в деталях выше, реализовано в прикладных программах 203.
Устройство обработки данных 200 может иметь дополнительные особенности или функциональные возможности. Например, устройство обработки данных 200 может также включать в себя дополнительные устройства хранения данных (съемные и несъемные), такие как, например, магнитные диски, оптические диски или лента. Такие дополнительные хранилища проиллюстрированы на Фиг. 1 посредством съемного хранилища 207 и несъемного хранилища 208. Компьютерные носители данных могут включать в себя энергозависимые и энергонезависимые, съемные и несъемные носители, реализованные любым способом или при помощи любой технологии для хранения информации, такой как машиночитаемые инструкции, структуры данных, программные модули или другие данные. Устройство хранения данных 202, съемное хранилище 207 и несъемное хранилище 208 являются примерами компьютерных носителей данных. Компьютерные носители данных включают в себя, но не в ограничительном смысле, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), электрически стираемое программируемое ПЗУ (EEPROM), флэш-память или память, выполненную по другой технологии, ПЗУ на компакт-диске (CD-ROM), универсальные цифровые диски (DVD) или другие оптические запоминающие устройства, магнитные кассеты, магнитные ленты, хранилища на магнитных дисках или другие магнитные запоминающие устройства, или любую другую среду, которая может быть использована для хранения желаемой информации и к которой может получить доступ устройство обработки данных 200. Любой такой компьютерный носитель данных может быть частью устройства 200. Устройство обработки данных 200 может также включать в себя устройство(а) 205 ввода, такие как клавиатура, мышь, перо, устройство с речевым вводом, устройство сенсорного ввода, и так далее. Устройство (а) 206 вывода, такие как дисплей, динамики, принтер и тому подобное, также могут быть включены в состав устройства.
Устройство обработки данных 200 содержит коммуникационные соединения, которые позволяют устройству связываться с другими вычислительными устройствами, например по сети. Сети включают в себя локальные сети и глобальные сети наряду с другими большими масштабируемыми сетями, включая, но не в ограничительном смысле, корпоративные сети и экстрасети. Коммуникационное соединение является примером коммуникационной среды. Как правило, коммуникационная среда может быть реализована при помощи машиночитаемых инструкций, структур данных, программных модулей или других данных в модулированном информационном сигнале, таком как несущая волна, или в другом транспортном механизме, и включает в себя любую среду доставки информации. Термин «модулированный информационный сигнал» означает сигнал, одна или более из его характеристик изменены или установлены таким образом, чтобы закодировать информацию в этом сигнале. Для примера, но без ограничения, коммуникационные среды включают в себя проводные среды, такие как проводная сеть или прямое проводное соединение, и беспроводные среды, такие как акустические, радиочастотные, инфракрасные и другие беспроводные среды. Термин «машиночитаемый носитель», как употребляется в этом документе, включает в себя как носители данных, так и коммуникационные среды.
ПРИМЕРЫ РЕАЛИЗАЦИИ
Пусть имеется модель камеры, допускающая возможность позиционирования с различными скоростями. При этом известно, что в силу инерционности механизма, попытка позиционирования камеры в точку (Pan, Tilt) приводит к позиционированию в точку (Pan+Perr, Tilt+Terr), где (Perr, Terr) - ошибка позиционирования, величина которой зависит от скорости движения камеры в точку позиционирования, а направление зависит от вектора движения, которым обладала камера в момент достижения целевой позиции. Таким образом, позиционирование с максимальной скоростью приводит к появлению ошибки максимальной величины. Направление ошибки так же непредсказуемо, поскольку зависит от позиции, в которой камера находилась до начала позиционирования. Позиционирование с малой скоростью уменьшило бы ошибку, но многократно увеличило бы время позиционирования в случае, если начальная позиция камеры и целевая позиция существенно отличаются. В ходе тестирования возможностей поворотного механизма камеры выяснилось, что для достижения минимальной ошибки позиционирования достаточно определить одну промежуточную точку, отличающуюся от целевой позиции на один градус по панорамному углу и углу наклона и осуществлять движение из промежуточной позиции в целевую с минимальной скоростью. При этом увеличение расстояния между целевой позицией и промежуточной не приводит к уменьшению ошибки, но, естественно, приводит к увеличению времени позиционирования. В то же время, дальнейшее сокращение расстояния приводит к увеличению ошибки позиционирования. Таким образом, расстояние в один градус по двум углам является оптимальным с точки зрения уменьшения ошибки позиционирования.
В процессе экспериментов было выяснено, что при использовании последовательного дохода по панорамному углу, потом по углу наклона, при уменьшении расстояния от промежуточных точек до целевой точки ошибка изменяется нелинейно.
На Фиг. 4 по оси X расстояние в градусах от промежуточной позиции до целевой, по оси У ошибка позиционирования (по панорамному углу и углу наклона) (усредненная за множество экспериментов).
Как видно из Фиг. 4, при уменьшении расстояния от промежуточной позиции до целевой начинает возрастать ошибка позиционирования (уменьшаться повторяемость), причем это связано с особенностями механизма конкретной модели камер.
При этом точка с координатой по Х=0 соответствует отсутствию использования промежуточных точек.
Как видно на Фиг. 4, даже введение промежуточных позиций на небольшом расстоянии от целевой уже достигается технический результат, но минимальная ошибка достигается при угле дохода 10 градусов, и после нее увеличение угла дохода практически не влияет на ошибку.
Таким образом, с точки зрения достижения технического результата доход на 10 и на 20 градусов не отличаются (ошибка одинаковая), но доход на 10 градусов предпочтительнее, т.к. он задействует меньше механический ресурс камеры и его можно осуществить быстрее (т.к. камере надо меньше расстояние прокрутить объектив).
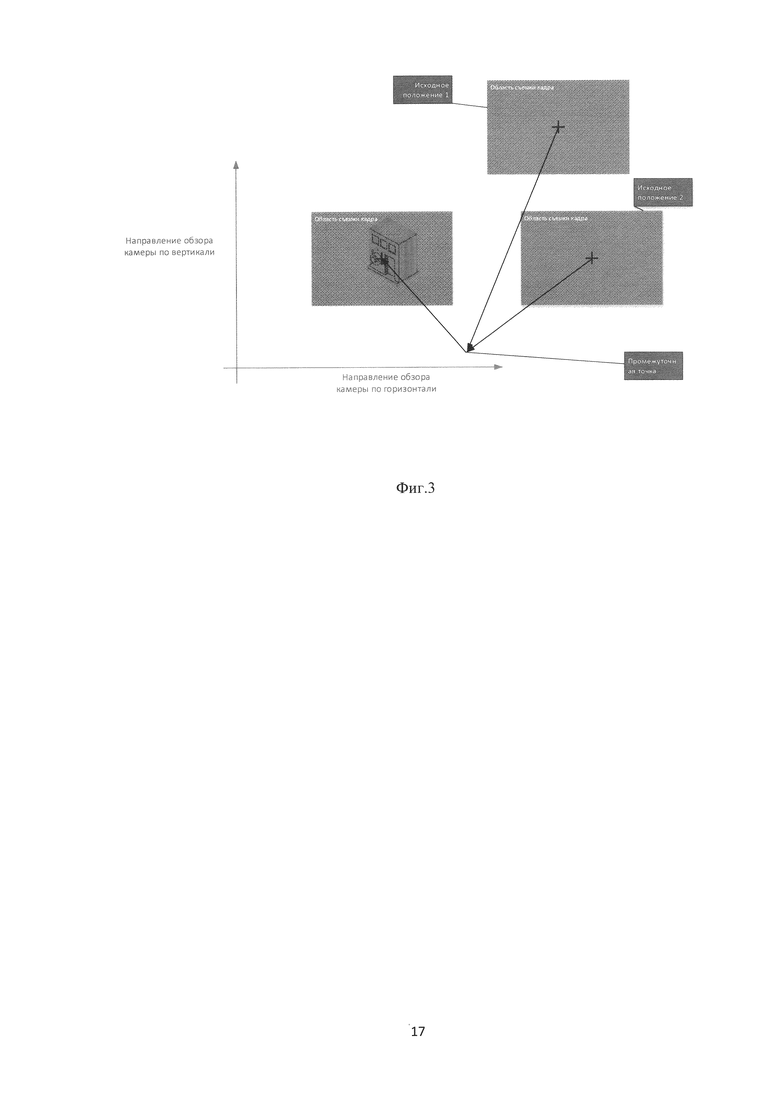
Далее рассматривается пример реализации технического решения (Фиг. 3), в котором присутствует одна промежуточная точка (Pan - 1°, Tilt - 1°). Определение промежуточной позиции (Pan - 1°, Tilt - 1°) дано в абсолютных координатах камеры, но также может быть определено в относительных координатах. При этом, если исходная позиция камеры была (Рисх, Тисх), то относительная позиция промежуточной точки будет (Pan-1-Рисх, Tilt-1-Тисх) и будет соответствовать смещению, на которое подлежит повернуть камеру для достижения промежуточной позиции. Аналогично, координаты целевой позиции относительно промежуточной позиции будут (1, 1).
Предварительно, получают целевую позицию (Pan, Tilt). Далее определяют одну промежуточную позицию (Pan - 1°, Tilt - 1°), после чего поворачивают камеру с максимальной скоростью из исходной позиции в промежуточную. Из промежуточной позиции поворачивают камеру в целевую позицию с минимальной скоростью.
Результатом такой последовательности действий будет уменьшение ошибки позиционирования в целевой точке, поскольку движение в нее осуществлялось с минимальной скоростью. При этом время позиционирования вырастет несущественно, поскольку с минимальной скоростью камера двигалась лишь короткий промежуток траектории позиционирования, а именно путь в один градус по панорамному углу и углу наклона. Кроме того, направление уменьшенной ошибки будет одинаковым, поскольку вектор движения камеры в момент достижения целевой позиции будет одним и тем же, что позволит перевести ошибку в разряд систематических, учесть и таким образом полностью нивелировать.
В примере реализации с двумя промежуточными точками предварительно получают целевую позицию, после чего определяют две промежуточные позиции. Первая позиция (Pan - 1°, Tilt - 1°), вторая позиция (Pan, Tilt - 1°). Затем осуществляют позиционирование в первую промежуточную позицию с максимальной скоростью, после чего происходит позиционирование во вторую промежуточную позицию с минимальной скоростью. В итоге осуществляют позиционирование в целевую позицию с минимальной скоростью.
Специалисту в данном уровне техники очевидно, что технический результат достигается при использовании одной промежуточной точки. При увеличении количества промежуточных точек, ошибка позиционирования уменьшается.
Кроме технического результата, описанного для способа с одной промежуточной точкой, данный способ имеет результатом дальнейшее уменьшение ошибки позиционирования, связанное с тем, что на двух последних шагах движение осуществляется только по одному из углов и отсутствует ошибка, связанная с неточной синхронизацией приводов механизма позиционирования, осуществляющих движение по каждому из углов.
Настоящее подробное описание составлено с приведением различных не имеющих ограничительного и исчерпывающего характера вариантов осуществления. В то же время, специалистам, имеющим средний уровень компетентности в рассматриваемой области техники, очевидно, что различные замены, модификации или сочетания любых раскрытых здесь вариантов осуществления (в том числе частично) могут быть воспроизведены в пределах объема настоящего технического решения. Таким образом, подразумевается и понимается, что настоящее описание технического решения включает дополнительные варианты осуществления, суть которых не изложена здесь в явно выраженной форме. Такие варианты осуществления могут быть получены путем, например, сочетания, модификации или преобразования каких-либо действий, компонентов, элементов, свойств, аспектов, характеристик, ограничений и пр., относящихся к приведенным здесь и не имеющим ограничительного характера вариантам осуществления.
ИСПОЛЬЗУЕМЫЕ ИСТОЧНИКИ
1. «Keeping a Pan-Tilt-Zoom Camera Calibrated)), авторы: Ziyan Wu, Richard J. Radke, опубликовано: IEEE Trans. Pattern Anal. Mach. Intell. - 2013.
2. S.N. Sinha and M. Pollefeys. Pan-tilt-zoom camera calibration and high-resolution mosaic generation. Computer Vision and Image Understanding, 103(3):170-183, Sept. 2006.
3. M. Sarkis, C. Senft, and K. Diepold. Calibrating an Automatic Zoom Camera With Moving Least Squares. IEEE Transactions on Automation Science and Engineering, 6(3):492-503, July 2009.
4. Интернет-ресурс: http://www.aktivsb.ru/article-info1052.html
5. Компьютерное зрение современный подход Computer Vision: A Modern Approach Авторы: Дэвид А. Форсайт, Жан Понс. Переводчики: А. Назаренко, И. Дорошенко. Языки: Русский Издательство: Вильямс ISBN 5-8459-0542-7, 0-13-085198-1; 2004 г.
6. Стронгин Р.Г. Численные методы в многоэкстремальных задачах. "Оптимизация и исследование операций", Главная редакция физико-математической литературы издательства "Наука", М., 1978, 240 стр.
7. Пападимитриу X., Стайглиц К. Комбинаторная оптимизация: Алгоритмы и сложность. М.: Мир, 1985.
8. Батищев Д.И. Генетические алгоритмы решения экстремальных задач. Под ред. Львовича Я.Е.: Учеб. пособие. Воронеж, 1995, 64 с.
9. Интернет-ресурс: https://ru.wikipedia.org/wiki/Углы_Эйлepa
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система определения параметров калибровки PTZ камеры | 2018 |
|
RU2699401C1 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО УДАЛЕННЫХ ОБЪЕКТОВ | 2016 |
|
RU2652535C2 |
| Способ эмуляции по меньшей мере двух стационарных виртуальных видеокамер при использовании одной поворотной (PTZ) видеокамеры | 2017 |
|
RU2663884C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2017 |
|
RU2646936C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ПРИРОДНЫХ ПОЖАРОВ В ПРИГОРИЗОНТНЫХ ОБЛАСТЯХ | 2017 |
|
RU2650347C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПАНОРАМНОГО ИЗОБРАЖЕНИЯ | 2020 |
|
RU2759965C1 |
| СПОСОБ ПОЛУЧЕНИЯ ФОТО- ИЛИ ВИДЕОИЗОБРАЖЕНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ОБЪЕКТА СЪЕМКИ | 2015 |
|
RU2671551C2 |
| СПОСОБ УПРАВЛЕНИЯ КАМЕРОЙ В РОБОТОХИРУРГИЧЕСКОМ КОМПЛЕКСЕ | 2020 |
|
RU2721461C1 |
| Способ и устройство для интеграции объекта в панорамное видео | 2018 |
|
RU2730877C1 |
| Система калибровки и способ определения геометрических параметров рабочих органов для автоматизации работы строительной техники | 2024 |
|
RU2830703C1 |
Изобретение относится к области видеонаблюдения, в частности к видеонаблюдению с использованием поворотных (PTZ) камер. Техническим результатом является уменьшение ошибки позиционирования камеры и увеличение повторяемости позиционирования. Предложен способ уменьшения ошибки позиционирования PTZ-камеры, характеризующийся тем, что получают целевую позицию поворота камеры, затем определяют по крайней мере одну промежуточную позицию камеры и ее координаты на основе данных о целевой позиции поворота камеры, после чего последовательно поворачивают камеру в целевую позицию через вышеупомянутые промежуточные позиции. 2 н. и 19 з.п. ф-лы, 4 ил. 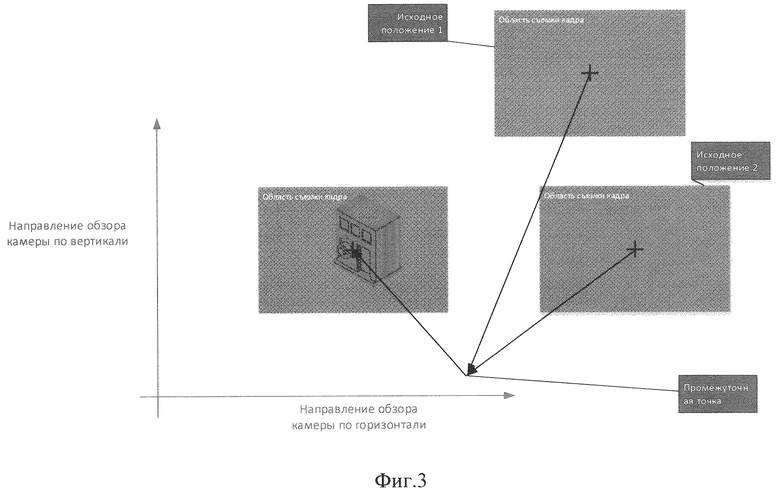
1. Способ уменьшения ошибки позиционирования PTZ-камеры, характеризующийся тем, что:
- получают целевую позицию поворота камеры;
- определяют по крайней мере одну промежуточную позицию камеры и ее координаты на основе данных о целевой позиции поворота камеры;
- последовательно поворачивают камеру в целевую позицию через вышеупомянутые промежуточные позиции.
2. Способ по п. 1, характеризующийся тем, что по крайней мере одну промежуточную позицию и ее координаты определяют путем проведения тестирования камеры.
3. Способ по п. 1, характеризующийся тем, что по крайней мере одну промежуточную позицию и ее координаты определяют исходя из представлений о способе работы и характеристиках поворотного механизма камеры.
4. Способ по п. 1, характеризующийся тем, что промежуточные точки могут быть определены через абсолютные координаты или через относительные координаты.
5. Способ по п. 1, в котором количество и координаты промежуточных позиций зависят от требуемой скорости и точности позиционирования.
6. Способ по п. 1, в котором относительные координаты промежуточной позиции определяются таким образом, чтобы промежуточная позиция находилась максимально близко к требуемой позиции.
7. Способ по п. 2, в котором для определения ошибки позиционирования используют алгоритмы компьютерного зрения.
8. Способ по п. 1, характеризующийся тем, что определяют по крайней мере две промежуточные позиции, причем первая позиция отличается на А по панорамному углу и углу наклона от требуемой позиции, а вторая промежуточная позиция по панорамному углу совпадает с требуемой позицией, а по углу наклона отличается на А.
9. Способ по п. 1, характеризующийся тем, что определяют по крайней мере две промежуточные позиции, причем первая позиция отличается на А по панорамному углу и углу наклона от требуемой позиции, а вторая промежуточная позиция по углу наклона совпадает с требуемой позицией, а по панорамному углу отличается на А.
10. Способ по п. 1, характеризующийся тем, что скорость движения из исходной точки до первой промежуточной, между промежуточными и между последней промежуточной точкой и целевой точкой могут быть различными.
11. Система уменьшения ошибки позиционирования PTZ-камеры включает:
- позиционируемую дистанционно управляемую PTZ-камеру;
- одно или более устройств обработки данных;
- одно или более устройств хранения данных;
- одну или более программ,
i. где одна или более программ хранятся на одном или более устройстве хранения данных и исполняются на одном и более устройстве обработки данных, причем одна или более программ включает следующие инструкции:
- получают целевую позицию поворота камеры;
- определяют по крайней мере одну промежуточную позицию камеры и ее координаты на основе данных о целевой позиции поворота камеры;
- последовательно поворачивают камеру в целевую позицию через вышеупомянутые промежуточные позиции.
12. Система уменьшения ошибки позиционирования PTZ-камеры по п. 11, в которой устройство обработки данных включает блок принятия команд и управляющий блок, выполненный с возможностью отображать информацию в блоке вывода данных.
13. Система уменьшения ошибки позиционирования PTZ-камеры по п. 11, в которой по крайней мере одну промежуточную позицию и ее координаты определяют путем проведения тестирования камеры.
14. Система уменьшения ошибки позиционирования PTZ-камеры по п. 11, в которой по крайней мере одну промежуточную позицию и ее координаты определяют исходя из представлений о способе работы и характеристиках поворотного механизма камеры.
15. Система уменьшения ошибки позиционирования PTZ-камеры по п. 11, в которой промежуточные точки могут быть определены через абсолютные координаты или через относительные координаты.
16. Система уменьшения ошибки позиционирования PTZ-камеры по п. 11, в которой количество и координаты промежуточных позиций зависят от требуемой скорости и точности позиционирования.
17. Система уменьшения ошибки позиционирования PTZ-камеры по п. 11, в которой относительные координаты промежуточной позиции определяются таким образом, чтобы промежуточная позиция находилась максимально близко к требуемой позиции.
18. Система уменьшения ошибки позиционирования PTZ-камеры по п. 11, в которой для определения ошибки позиционирования используют алгоритмы компьютерного зрения.
19. Система уменьшения ошибки позиционирования PTZ-камеры по п. 11, в которой определяют по крайней мере две промежуточные позиции, причем первая позиция отличается на А по панорамному углу и углу наклона от требуемой позиции, а вторая промежуточная позиция по панорамному углу совпадает с требуемой позицией, а по углу наклона отличается на А.
20. Система уменьшения ошибки позиционирования PTZ-камеры по п. 11, в которой определяют по крайней мере две промежуточные позиции, причем первая позиция отличается на А по панорамному углу и углу наклона от требуемой позиции, а вторая промежуточная позиция по углу наклона совпадает с требуемой позицией, а по панорамному углу отличается на А.
21. Система уменьшения ошибки позиционирования PTZ-камеры по п. 11, в которой скорость движения из исходной точки до первой промежуточной, между промежуточными и между последней промежуточной точкой и целевой точкой могут быть различными.
| US 2011102586 A1, 2011-05-05 | |||
| US 2006098092 A1, 2006-05-11 | |||
| US 2010033567 A1, 2010-02-11 | |||
| US 2013329003 A1, 2013-12-12 | |||
| US 5847960 A, 1998-12-08 | |||
| US 7623156 B2, 2009-11-24 | |||
| US 2005036036 A1, 2005-02-17 | |||
| US 2008188983 A1, 2008-08-07 | |||
| УСТРОЙСТВО КАЛИБРОВКИ ОПТИКОЭЛЕКТРОННОЙ СИСТЕМЫ | 2001 |
|
RU2199150C2 |
| M | |||
| Sarkis et al, Calibrating an Automatic Zoom Camera With Moving Least Squares, IEEE Transactions on Automation Science and Engineering, July 2009, c.492-503. | |||

