Изобретение относится к области удаленной беспилотной доставки технических средств, оборудования, машин, механизмов, конструкций и материалов к месту проведения работ по суше, под водой и над водой и может быть использовано в военных и гражданских целях.
Известен малогабаритный телеуправляемый подводный аппарат (патент РФ №2387570, МПК B63G 8/00, B63G 8/38, B63C 11/00, опубл. 27.04.2010), содержащий раму модульной конструкции, движители горизонтального и вертикального хода, прочные герметичные контейнеры для размещения электронной части подводного аппарата, светильники, обзорную и стационарную видеокамеры, датчики глубины и температуры, компенсаторы давления, блок плавучести, установленный в верхней части подводного аппарата, манипуляционный модуль, включающий снабженный охватом манипулятор и герметичный привод, причем манипулятор установлен на выходном валу этого привода, надводный модуль управления, включающий пульт управления, источник электропитания, блок отображения видеоинформации, и кабель связи, соединяющий подводный аппарат с надводным модулем. На другом конце выходного вала привода манипулятора дополнительно установлена видеокамера так, что ее ось визирования постоянно направлена в центр охвата манипулятора, подводный аппарат снабжен съемным перфорированным контейнером для сбора образцов, установленным в верхней части подводного аппарата соосно с его вертикальной осью, а обзорная видеокамера установлена посредством кронштейна над блоком плавучести в диаметральной плоскости подводного аппарата в его кормовой части.
Недостатком известного аппарата является ограниченная область его применения только подводными работами.
Наиболее близким к предлагаемой является погружаемая платформа с изменяемой геометрией конструкции (патент РФ на изобретение №2438914, МПК B63B 35/00, опубл. 10.01.2012). Она представляет собой средство, выполненное из модулей базовой конструкции, набор которых обеспечивает возможность монтажа платформы заданной конфигурации, и функциональных модулей, закрепляемых на этой конструкции.
Недостатком платформы по патенту РФ №2438914 является ограниченная область ее применения - только подводные объекты.
Техническая задача, решаемая изобретением, заключается в расширении области ее применения за счет обеспечения возможности беспилотной доставки объектов по суше, под водой, над водой и по воде.
Поставленная задача решается тем, что в платформе-трансформере, включающей по меньшей мере два функциональных модуля, согласно изобретению функциональные модули выполнены в виде по меньшей мере двух сменных модулей доставки и размещенного в модуле доставки рабочего модуля. Рабочий модуль выполнен в виде беспилотника-трансформера, по меньшей мере один из сменных модулей доставки выполнен в виде радиоуправляемого транспортного средства на гусеничном ходу и по меньшей мере один - в виде радиоуправляемого подводно-надводного транспортного средства, выполненного с возможностью герметизации корпуса.
Снабжение платформы трансформера сменными модулями доставки обеспечивает возможность доставки рабочего модуля к месту назначения в любых условиях: по суше, по воде и/или под водой.
Рабочий модуль может быть снабжен по меньшей мере четырьмя авиационными двигателями с изменяющимся вектором тяги, обеспечивающими его перемещение в воздушном пространстве.
Рабочий модуль может быть снабжен по меньшей мере четырьмя двигателями на воздушной и/или водяной струе, обеспечивающими его движение по воде и подъем над водной поверхностью или сушей для обеспечения режима перехода на авиационные двигатели и полета.
Для обеспечения энергетической независимости при передвижении на дальние расстояния платформа-трансформер может быть снабжена размещенной на рабочем модуле и/или модуле доставки дублирующей системой энергообеспечения, включающей резервные аккумуляторы, генераторы и емкость для запаса топлива. Дублирующая система энергообеспечения на рабочем модуле обеспечивает его доставку в удаленную зону проведения работ.
Для обеспечения движения под водой рабочего модуля и соединения рабочего модуля с модулем доставки под водой модуль доставки и рабочий модуль могут быть снабжены балластными системами всплытия и погружения.
Рабочий модуль может быть снабжен герметизирующей крышкой, выполненной по меньшей мере из двух частей. Причем герметизирующая крышка при всплытии в рабочей зоне и движении в воздухе может трансформироваться в крылья аэродинамического профиля.
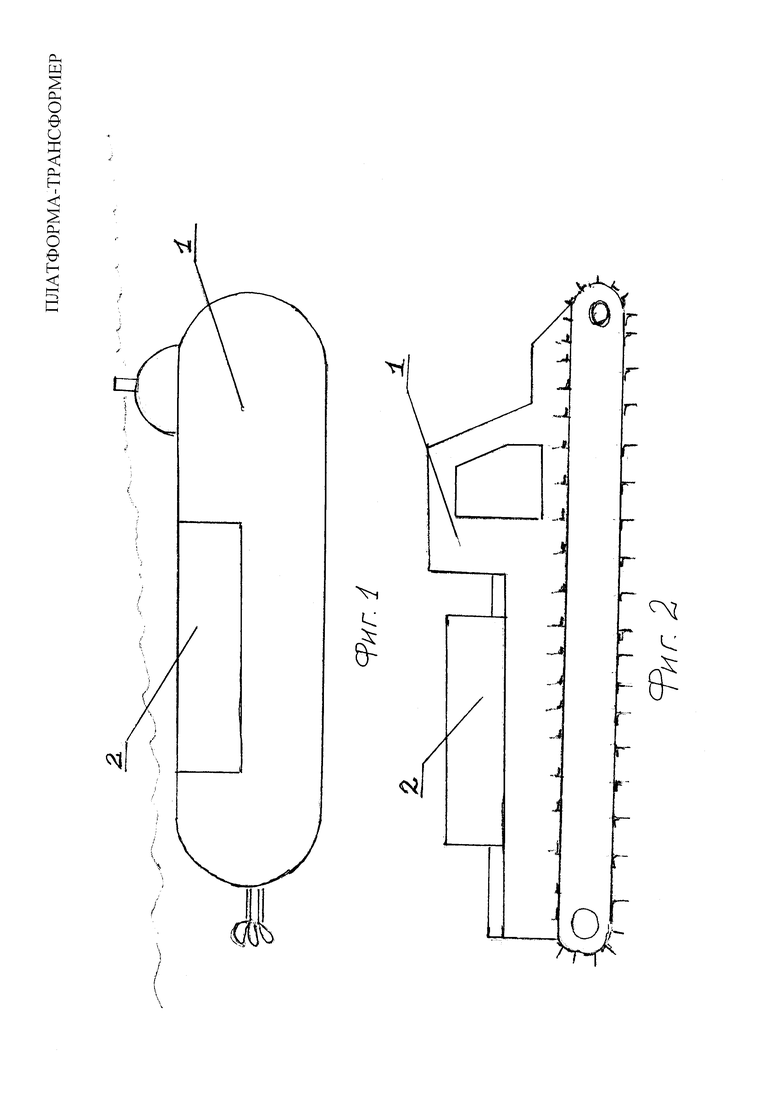
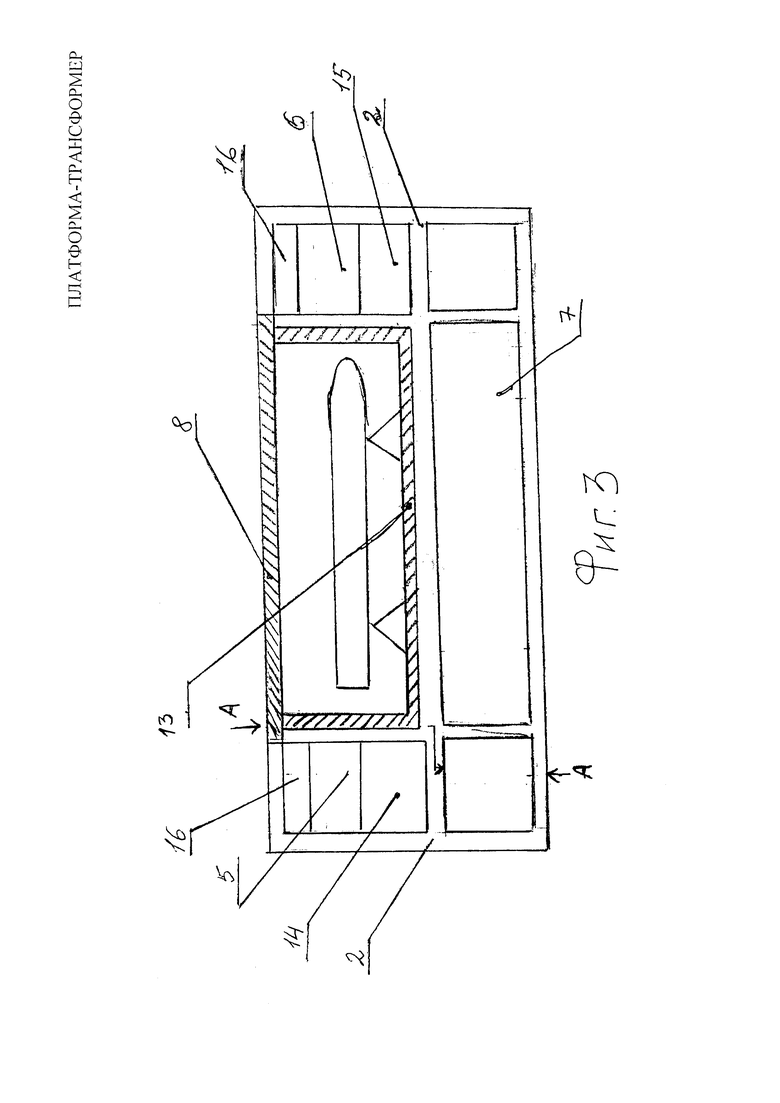
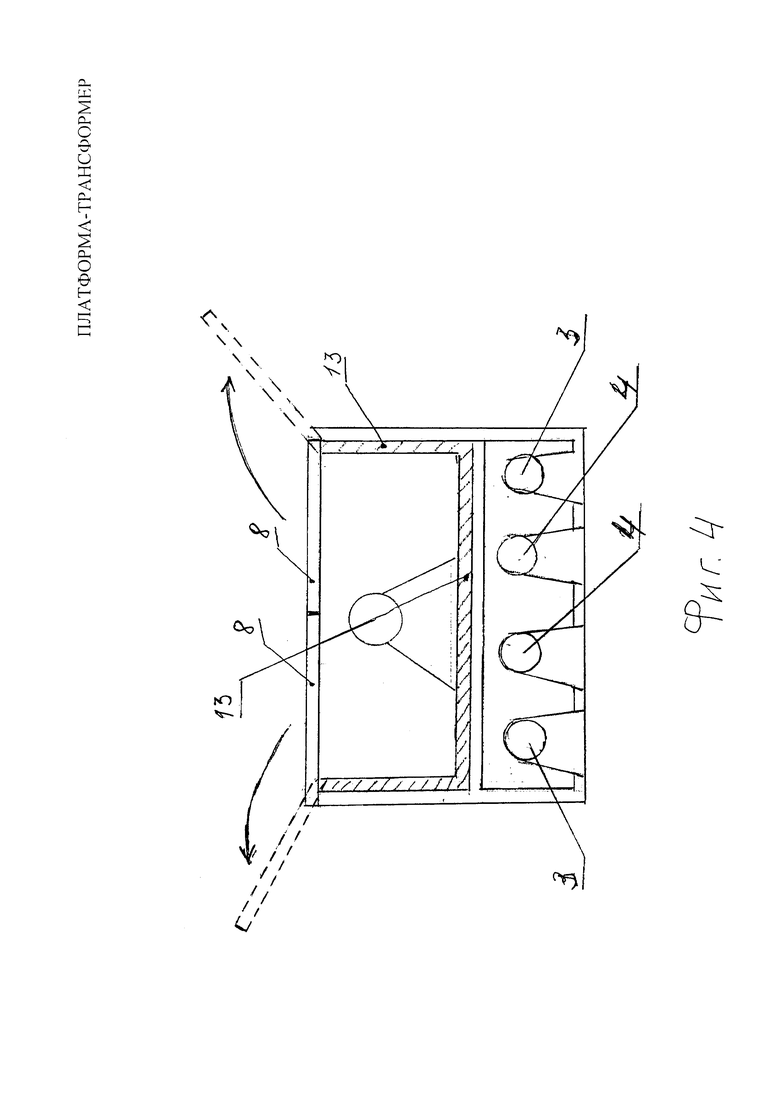
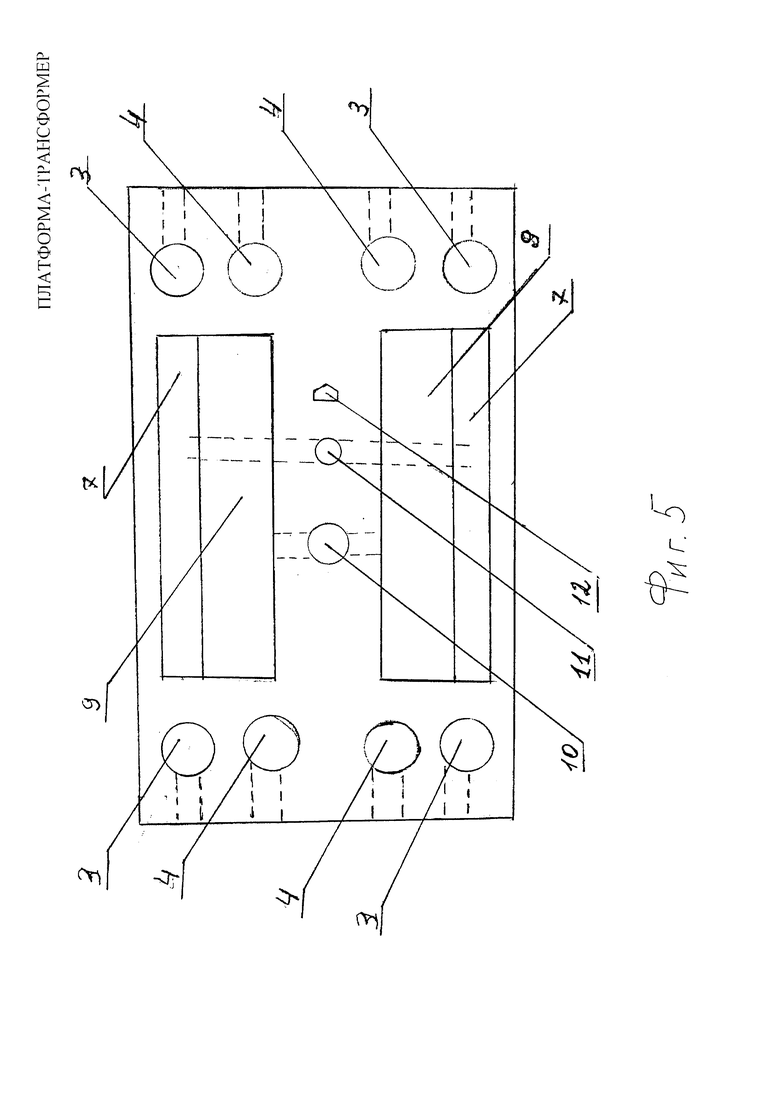
Изобретение поясняется чертежами, где на фиг. 1 представлена заявляемая платформа-трансформер с подводно-надводным модулем доставки, вид сбоку; на фиг. 2 - с модулем доставки на гусеничном ходу; на фиг. 3 - рабочий модуль в разрезе, вид сбоку; на фиг. 4 - разрез по А-А фиг. 3; на фиг. 4 - рабочий модуль, вид снизу.
Платформа-трансформер включает сменные модули доставки 1, выполненные в виде радиоуправляемого транспортного средства на гусеничном ходу и в виде радиоуправляемого подводно-надводного транспортного средства, выполненного с возможностью герметизации корпуса. На сменных модулях размещен рабочий модуль 2, выполненный в виде беспилотника-трансформера. Рабочий модуль 2 может быть снабжен четырьмя авиационными двигателями 3 с изменяющимся вектором тяги, обеспечивающим его перемещение в воздушном пространстве, и четырьмя двигателями 4 на воздушной и/или водяной струе с изменяющимся вектором тяги, обеспечивающими его подъем над водной поверхностью и поверхностью суши.
Для обеспечения энергетической независимости при передвижении в зону работы платформа-трансформер может быть снабжена размещенной на рабочем модуле 2 и/или модуле доставки 1 системой энергообеспечения, включающей резервные аккумуляторы 5, генераторы 6, емкость для запаса топлива 7 и балластные системы для погружения и всплытия как отдельно, так и вместе.
Предлагаемая платформа-трансформер работает следующим образом.
На модуль доставки 1, выполненный в виде радиоуправляемого транспортного средства на гусеничном ходу, устанавливают рабочий модуль 2 и соединяют оба модуля. После доставки рабочего модуля к месту назначения рабочий модуль 2 отсоединяют от модуля доставки 1, включают авиационные двигатели 3, после чего рабочий модуль 2 либо направляется к месту назначения на авиационных двигателях 3, либо перемещается на сменный модуль доставки 1 в виде радиоуправляемого подводно-надводного транспортного средства, выполненного с возможностью герметизации корпуса, для дальнейшей транспортировки. После установки на сменный модуль доставки 1 рабочий модуль 2 закрепляют на подводном модуле доставки 1. При необходимости дальнейшего перемещения платформы-трансформера под водой корпус модуля доставки герметизируют. Далее платформа-трансформер перемещается по водной поверхности или погружается и перемещается под водой. После доставки к следующей точке назначения платформа-трансформер всплывает, корпус модуля доставки 1 разгерметизируют. Затем рабочий модуль 2 посредством двигателей 4 поднимают над водной поверхностью, либо продолжают его движение под водой. При движении под водой аэродинамические элементы 8 надежно герметизируют внутреннюю полость рабочего модуля 2, выполняя функцию герметизирующей крышки. После подъема рабочего модуля 2 над водной поверхностью раздвигают аэродинамические элементы 8, включают авиационные двигатели 3 и осуществляют передвижение рабочего модуля 2 к цели. При этом аэродинамические элементы 8 выполняют функцию крыла рабочего модуля 2. После выполнения задачи рабочий модуль 2 на авиационных двигателях 3 возвращают к месту расположения модуля доставки 1, размещают в последнем и соединяют с ним. Аэродинамические элементы 8 закрывают, герметизируя тем самым рабочий модуль 2. Дальнейшие перемещения осуществляются так же, как и при первоначальной доставке рабочего модуля 2 к месту назначения. Для скрытого движения под водой и соединения рабочего модуля 2 с модулем доставки 1 оба модуля снабжены обеспечивающей всплытие и погружение подводного рабочего модуля 1 балластной системой 9 с клапаном 10. После соединения рабочего модуля 2 с модулем доставки 1 платформа-трансформер возвращается в место постоянного нахождения.
При необходимости длительной работы платформы-трансформера в удалении от места постоянного нахождения могут быть использованы аккумуляторы 5 и генераторы 6. Дозаправка авиационных двигателей в этом случае может быть осуществлена из емкости для запаса топлива 7 через верхнюю и нижнюю горловины 11, а подзарядка аккумулятора 5 через верхний и нижний разъемы 12. При заправке рабочего модуля на суше используют верхние горловину 11 и/или разъем 12, а при заправке под водой - нижние горловину 11 и/или разъем 12. Для ускорения погрузки-разгрузки груза, перевозимого платформой-трансформером в зону проведения работ, целесообразно снабдить рабочий модуль 2 грузовым боксом 13. Для обеспечения выполнения функций и задач платформы трансформера рабочий модуль 2 и модуль доставки 1 снабжены блоками управления 14 и 15. Закрытие и раскрытие аэродинамических элементов 8 осуществляют посредством механизма открытия-раскрытия 16.
Преимущества предлагаемой платформы трансформера:
а) платформа-трансформер является модульной самодвижущейся рамной конструкцией, приводимой в движение и удерживаемой в воздушном, надводном, подводном пространстве и на суше бортовыми движительными средствами;
б) платформа выполняется любых типоразмеров в зависимости от характера требуемой задачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| ПЛАТФОРМА-АМФИБИЯ ДЛЯ ПЕРЕМЕЩЕНИЯ, ПОЗИЦИОНИРОВАНИЯ И НЕПОДВИЖНОГО БАЗИРОВАНИЯ РАБОЧИХ СРЕДСТВ И МЕХАНИЗМОВ В ХОДЕ ОСУЩЕСТВЛЕНИЯ РАБОТ | 2010 |
|
RU2468932C2 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСФОРМИРУЕМЫЙ МНОГОРАЗОВЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ И СПОСОБЫ СТАРТА | 2022 |
|
RU2778177C1 |
| АВТОМАТИЧЕСКИЙ МУЛЬТИРОТОРНЫЙ АППАРАТ ТРАНСПОРТЕР ДЛЯ ОПЕРАТИВНОЙ ДОСТАВКИ МЕДИКАМЕНТОВ, ПРОДОВОЛЬСТВИЯ И ДРУГОГО ГРУЗА ЧЕРЕЗ ОПАСНУЮ ДЛЯ ЧЕЛОВЕКА ЗОНУ | 2020 |
|
RU2736604C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| Способ формирования мишенного объекта, имитирующего старт воздушной цели в условиях ракетной позиции, аэродрома, необорудованной территории, и устройство для его осуществления | 2019 |
|
RU2759973C2 |
| ПРИТАПЛИВАЕМЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ИЗМЕРИТЕЛЬНЫХ И ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2011 |
|
RU2468959C1 |
| МОРСКАЯ ПЛАВУЧАЯ ПЛАТФОРМА | 2014 |
|
RU2556408C1 |
| Многофункциональный комплекс для выполнения подводно-технических работ | 2017 |
|
RU2653527C1 |
Изобретение относится к области удаленной беспилотной доставки технических средств, оборудования, машин, механизмов, конструкций и материалов к месту проведения работ по суше, под водой и над водой и может быть использовано в военных и гражданских целях. Платформа-трансформер включает по меньшей мере два функциональных модуля. Функциональные модули выполнены в виде по меньшей мере двух сменных модулей доставки и размещенного в модуле доставки рабочего модуля. Рабочий модуль выполнен в виде беспилотника-трансформера. По меньшей мере один из сменных модулей доставки выполнен в виде радиоуправляемого транспортного средства на гусеничном ходу и по меньшей мере один - в виде радиоуправляемого подводно-надводного транспортного средства, выполненного с возможностью герметизации корпуса. Достигается возможность беспилотной доставки объектов по суше, под водой, над водой и по воде. 5 з.п. ф-лы, 5 ил.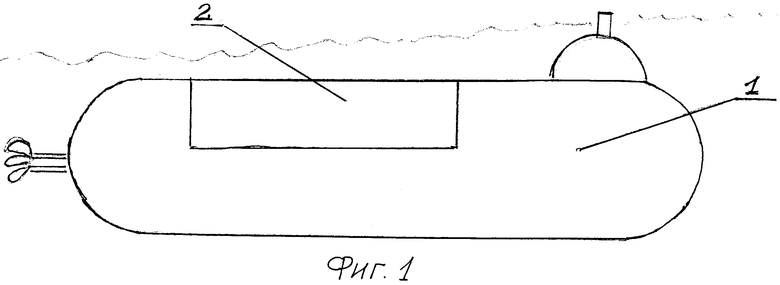
1. Платформа-трансформер, включающая по меньшей мере два функциональных модуля, отличающаяся тем, что функциональные модули выполнены в виде по меньшей мере двух сменных модулей доставки и размещенного в модуле доставки рабочего модуля, выполненного в виде беспилотника-трансформера, причем по меньшей мере один из сменных модулей доставки выполнен в виде радиоуправляемого транспортного средства на гусеничном ходу и по меньшей мере один - в виде радиоуправляемого подводно-надводного транспортного средства, выполненного с возможностью герметизации корпуса.
2. Платформа-трансформер по п.1, отличающаяся тем, что рабочий модуль снабжен по меньшей мере четырьмя авиационными двигателями с изменяющимися векторами тяги.
3. Платформа-трансформер по п.1, отличающаяся тем, что рабочий модуль снабжен по меньшей мере четырьмя двигателями на воздушной и/или водяной струе с изменяющимся вектором тяги.
4. Платформа-трансформер по п.1, отличающаяся тем, что она дополнительно снабжена размещенными на модуле доставки и на рабочем модуле системами энергообеспечения, включающими резервные аккумуляторы, генераторы и емкость для запаса топлива.
5. Платформа-трансформер по п.1, отличающаяся тем, что она дополнительно снабжена размещенными на модуле доставки и на рабочем модуле балластными системами.
6. Платформа-трансформер по п.1, отличающаяся тем, что рабочий модуль снабжен двумя аэродинамическими элементами, установленными с возможностью герметизации в их верхней части.
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| WO 2001098140 A1, 27.12.2001 | |||
| Запорно-проходной вентиль | 1955 |
|
SU102590A1 |
| Двухтактный двигатель внутреннего сгорания с кривошипно-камерной продувкой | 1983 |
|
SU1190072A1 |
| ПЛАВАЮЩАЯ ПЛАТФОРМА ДЛЯ МОРСКОГО СТРОИТЕЛЬСТВА И ПОДЪЕМА ЗАТОНУВШИХ СУДОВ | 2003 |
|
RU2261818C2 |

