Изобретение относится к способу для управления рельсовым транспортным средством с признаками ограничительной части п. 1 формулы.
Из области рельсовых транспортных средств известно, что в процессе ускорения может происходить так называемое боксование приводимых колес. При этом под боксованием специалисты в области рельсовых транспортных средств понимают проворачивание приводимых колес при движении или ускорении рельсового транспортного средства. Причина этого боксования состоит в сравнительно малом трении между металлическими рельсами и обычно также выполненными из металла колесами. Другим явлением, которое также объясняется этим сравнительно малым трением, является так называемое скольжение при торможении рельсового транспортного средства. При этом возникает кратковременное неподвижное состояние колес или кратковременное слишком сильное уменьшение скорости вращения колес при торможении, так что между колесами и рельсами происходит проскальзывание. В частности, тогда, когда возникает неподвижное состояние заторможенных колес, за счет скольжения в целом изнашивается поверхность колеса, так что это приводит к дисбалансу и проблемам с вращением колеса. При боксовании проблема состоит в том, что энергия привода из-за прокручивания колес тратится впустую, без возможности использования для осуществления желаемой тяги рельсового транспортного средства.
Поэтому оба явления, как скольжение, так и боксование, необходимо объединить. Чтобы иметь возможность соответствующим образом воздействовать на мощность привода или торможения рельсового транспортного средства, тем не менее, необходимы соответствующие данные, так что, согласно общему уровню техники, может быть определена фактическая скорость транспортного средства и, таким образом, заданная скорость колес. Если при этом фактическая скорость отличается от заданной скорости, то имеет место боксование или скольжение. При этом трудность представляет определение фактической скорости, в частности, тогда, когда все оси или колеса локомотива являются приводимыми или тормозятся, то все колеса страдают от этих явлений, и оказывается невозможным получить точные данные. Наряду с использованием неприводимой поддерживающей оси для определения фактической скорости, что является возможным лишь в случае моторного вагона, поскольку локомотивы обычно имеют привод на все оси, обычным способом определения фактической скорости является, например, использование радиодатчика, который регистрирует проходящую мимо рельсового транспортного средства поверхность земли и посредством этого определяет фактическую скорость рельсового транспортного средства. Недостаток при использовании такого рода радиодатчика поверхности земли состоит в высокой стоимости и в том факте, что они функционируют не особенно надежно и, таким образом, для сравнительно большой стоимости выдают сравнительно плохие данные измерений. Альтернативой этому представляется, например, измерение скорости посредством системы GPS. При этом такое измерение скорости посредством системы GPS имеет недостаток, состоящий в том, что качество измерений зависит от количества видимых для датчика GPS спутников системы GPS. Так, например, качество измерений в лесах, глубоких впадинах и подобных местах зачастую является плохим. В длинных туннелях, как это часто имеет место в железнодорожном движении, измерения являются невозможными. Кроме того, расчет скорости требует некоторого времени, так что данные о скорости, которые получены посредством системы GPS, к текущему моменту времени является сравнительно неточными, поскольку измерение фактической скорости в соответствующий текущий момент времени всегда немного «запаздывает».
В качестве примера описанных выше методик для предотвращения боксования или скольжения при помощи сравнения скорости колес с фактической скоростью рельсового транспортного средства следует сослаться на US 7467830 B2. В US 6152546 A дополнительно на основе измерений скорости рассчитывается ускорение, и эти данные используются для управления.
В отношении скольжения при торможении рельсового транспортного средства, кроме того, на основе ранее измеренных данных о динамике скорости торможения может быть оценена примерная фактическая скорость, в ходе чего эта динамика соответствующим образом экстраполируется. Характеристики этой системы также подвержены ухудшению, то есть рассчитанные данные отклоняются от фактических значений.
Задача настоящего изобретения состоит в том, чтобы предложить способ для управления рельсовым транспортным средством, который был бы в состоянии при помощи простых и дешевых средств избежать указанных выше недостатков, а также предотвратить или, по меньшей мере, минимизировать боксование и скольжение и, таким образом, обеспечивал бы лучшее использование энергии привода или щадящий (материалосберегающий) режим торможения такого рельсового транспортного средства.
Согласно изобретению, эта задача решается посредством способа с признаками отличительной части п. 1 формулы. В зависимых пунктах формулы представлены предпочтительные варианты осуществления и усовершенствования предлагаемого в изобретении способа.
Вместо распространенного в уровне техники измерения скорости, предлагаемый в изобретении способ использует измерение ускорений. Для этого в транспортном средстве устанавливается датчик ускорения. Такого рода датчики ускорения в настоящее время доступны в виде простых и сравнительно дешевых конструктивных элементов, обеспечивающих очень точные и быстрые измерения с высокой разрешающей способностью. Обычно измерения осуществляются во всех направлениях в пространстве. Такие датчики ускорения, или трехмерные датчики ускорения, обычно используются в автомобильной промышленности, чтобы активировать существенные для безопасности конструктивные элементы, например, подушки безопасности, при определенных величинах ускорения, или чтобы привести в готовность соответствующие, зависящие от ускорения системы управления функциями комфорта автомобиля. Такой простой, коммерчески доступный, имеющий высокую разрешающую способность датчик ускорения используется в предлагаемом в изобретении способе для определения самого по себе ускорения транспортного средства. При этом ускорение может являться либо положительным ускорением, либо отрицательным ускорением (замедлением). Скольжение или боксование колес рельсового транспортного средства возникает обычно лишь тогда, когда транспортное средство либо ускоряется, либо тормозится. В этих случаях у транспортного средства всегда возникает соответствующее ускорение, которое, согласно идее изобретения, может быть зарегистрировано посредством датчика ускорения.
При помощи датчиков числа оборотов на колесах, которые также уже используются в уровне техники, можно зарегистрировать изменение числа оборотов колес. Также является возможным определение другой величины, в частности, числа оборотов в поворотной тележке или также в трансмиссии, в частности, на выходе механизма смены ходовых ступеней, которое соответствует числу оборотов колес. Из этого может быть определено изменение числа оборотов колес. Изменение числа оборотов, по меньшей мере, одного приводимого/тормозимого колеса обеспечивает возможность определения ускорения этого колеса. Тогда величина ускорения этого приводимого/тормозимого колеса может быть непосредственно или, при необходимости, с поправкой на смещение сравнена с величиной ускорения, полученной посредством используемого, согласно изобретению, датчика ускорения.
Посредством системы управления мощностью привода и/или силой торможения осуществляется соответствующее согласование, если ускорение приводимого/тормозимого колеса отличается от ускорения транспортного средства. Благодаря согласованию мощности привода и/или силы торможения, боксование или скольжение колес рельсового транспортного средства может быть предотвращено или, в любом случае, по меньшей мере, существенно уменьшено.
Этот способ позволяет предельно быстро реагировать на боксование или скольжение колес. Как только ускорение колес, определенное, например, посредством вычисления производной его определяемой через число оборотов окружной скорости, отличается от ускорения транспортного средства, необходимо предполагать возникновение боксования или скольжения. Например, в случае боксования мощность для приведения в движение транспортного средства может быть непосредственно уменьшена, чтобы противодействовать этому боксованию. Такая система управления, действующая на основании данных об ускорении, имеет решающее преимущество, состоящее в том, что она может предельно быстро реагировать на возникновение боксования или скольжения. Временные задержки, которые необходимы для определения скорости, например, посредством системы GPS, в этом случае не возникают.
В заявленном способе является предпочтительным, что мощность для приведения в движение транспортного средства или сила для торможения транспортного средства уменьшается, если величина ускорения приводимого/тормозимого колеса больше величины ускорения транспортного средства. Если величины ускорения приводимого/тормозимого колеса отличаются от величин ускорения транспортного средства, то всегда имеет место боксование или скольжение. В зависимости от того, осуществляется ли приведение в движение или торможение, речь идет о боксовании или скольжении. Если ускорение или замедление приводимого/тормозимого колеса, то есть фактически, значение величины ускорения больше, чем значение величины ускорения транспортного средства, то необходимо осуществить соответствующее реагирование, в ходе которого уменьшается мощность привода транспортного средства или уменьшается сила для торможения транспортного средства. Таким образом, осуществляется эффективное противодействие боксованию или скольжению.
Согласно особенно выгодной и предпочтительной модификации предлагаемого изобретением способа, предусмотрено, что это уменьшение мощности или силы осуществляется с функцией по времени, в частности линейной функцией по времени. Этот принцип действия очень эффективно противодействует боксованию или скольжению, поскольку удается избежать резких изменений мощности или силы и осуществить «мягкое» согласование мощности или силы, например, с линейной зависимостью.
Если более не имеется разницы ускорений и, значит, колеса уже более не буксуют или не скользят, то тогда мощность снова может быть увеличена до желаемого значения. При этом протекание способа может быть проведено в виде управления, в частности, он осуществляется в виде регулирования, которое регулирует соответствующее согласование величин на непрерывно рассчитанную на основании данных о разнице ускорений заданную величину.
Число оборотов приводимого/тормозимого колеса обычно определяется посредством датчика числа оборотов. Он может быть расположен предпочтительно в области приводимого/тормозимого колеса или приводимых/тормозимых колес непосредственно или на без возможности поворота соединенной с колесами оси или на оси соединенных друг с другом в поворотной тележке колес. Это наилучшим образом обеспечивает измерение ускорения приводимого/тормозимого колеса или приводимых/тормозимых колес и позволяет, таким образом, осуществить способ с высокой точностью. При этом при помощи расположенного таким образом датчика можно соответствующим образом осуществить реагирование на боксование или скольжение.
В альтернативном варианте осуществления предлагаемого изобретением способа может быть предусмотрено, что датчик числа оборотов расположен в области трансмиссии на выходном вале механизма смены ходовых ступеней транспортного средства. В области выходного вала в случае осуществления привода число оборотов также соответствует числу оборотов приводимого/тормозимого колеса или приводимых/тормозимых колес, поскольку между выходным валом механизма смены ходовых ступеней и колесами обычно установлены выполнены без возможности проворота соединения с жестко заданными передаточными соотношениями, например, дифференциалы, реверсивные передачи или подобного рода соединения. Поэтому число оборотов выходного вала механизма смены ходовых ступеней также может быть использовано для определения ускорения и сравнения этого ускорения с ускорением транспортного средства. Разумеется, при такой конструкции можно воздействовать лишь на боксование, но не на возможное скольжение. Тем не менее, такая конструкция имеет преимущество, состоящее в том, что она может быть осуществлена независимо от соответствующего рельсового транспортного средства, так что, например, сама по себе трансмиссия, которая может быть использована для различных рельсовых транспортных средств, имеет одинаковую конструкцию и одинаковые сенсорные элементы для предотвращения боксования. Это является особенным преимуществом в отношении модульного принципа построения систем и возможности использования трансмиссии в различных рельсовых транспортных средствах.
Другие предпочтительные варианты осуществления предлагаемого в изобретении способа представлены в оставшихся зависимых пунктах формулы и детально разъяснены на примере осуществления изобретения, который подробно описан ниже при помощи чертежа.
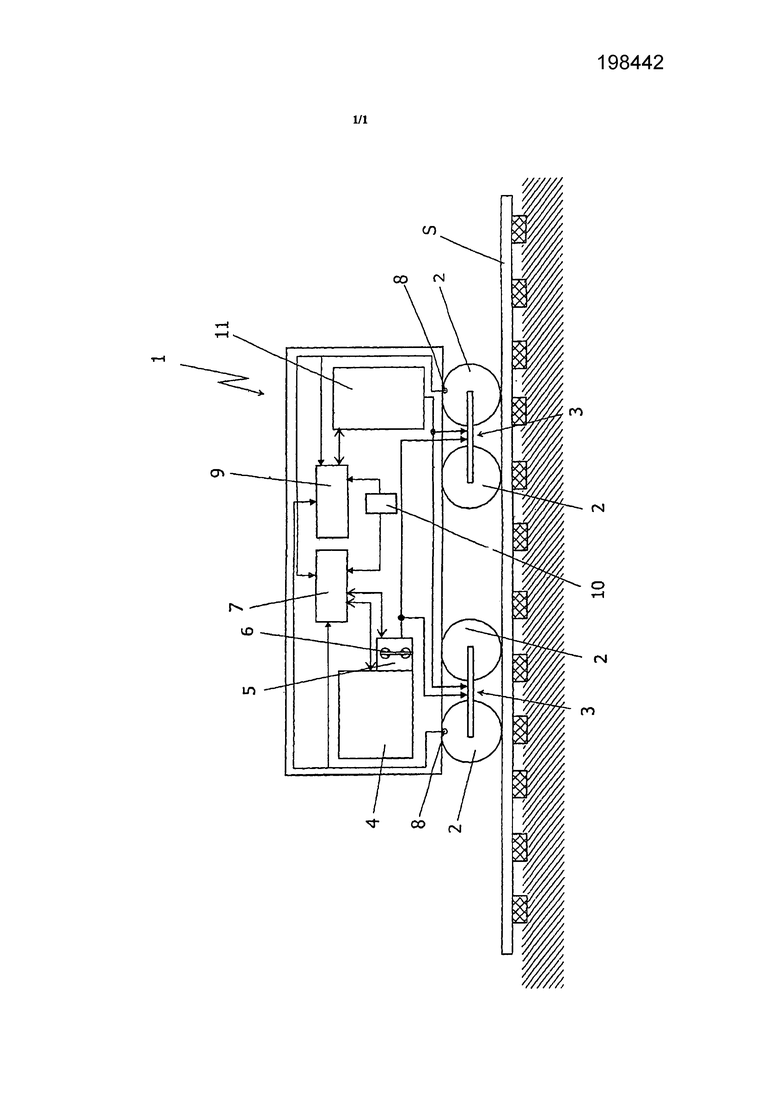
На чертеже схематически представлено рельсовое транспортное средство с соответствующим оборудованием для осуществления предлагаемого изобретением способа.
На чертеже представлено отмеченное схематически рельсовое транспортное средство 1, которое приводится в движение посредством приводимых колес 2, расположенных по четыре на каждой поворотной тележке 3. Таким образом, транспортное средство 1 приводится в движение всеми колесами 2, причем здесь принципиально показана лишь одна сторона транспортного средства и, таким образом, видны лишь четыре колеса 2. Таким же образом все имеющиеся колеса 2 транспортного средства 1 тормозятся при торможении. Транспортное средство 1 может перемещаться по схематически показанным рельсам S. Через приводной механизм 4 и узел 5 трансмиссии мощность для приведения в движение транспортного средства 1 подается в область колес 2, конструкция которой известна из общего уровня техники и потому представлена здесь лишь схематически. Приводной механизм 4 может являться любым приводным механизмом 4, например, на основе двигателя внутреннего сгорания, электродизельного приводного узла привода, электрического приводного узла привода или приводного узла подобного рода.
Для представленного здесь примера осуществления изобретения приводной механизм 4 должен быть дизельным двигателем, который приводится в действие через механизм смены ходовых ступеней (переключенная передача), в частности, автоматический механизм смены ходовых ступеней, выполненный в виде узла 5 трансмиссии. Узел 5 трансмиссии содержит различные конструктивные элементы трансмиссии, такие как, например, планетарная передача, цилиндрическая зубчатая передача или другие элементы такого рода, а также гидродинамический преобразователь 6. Эта конструкция также известна из уровня техники, поэтому здесь она показана лишь схематически. Вместо гидродинамического преобразователя 6 в трансмиссии может быть также использована гидродинамическая муфта. Кроме того, в трансмиссии показана система 7 управления, в данном случае система управления тягой, которая управляет или регулирует отдачу мощности. При этом система 7 управления тягой соединена с символически показанным датчиком 8 числа оборотов на одном из колес 2 каждой поворотной тележки 3. Посредством этих датчиков 8 числа оборотов определяется число оборотов соответствующих приводимых/тормозимых колес 2. Поскольку колеса 2 на одной поворотной тележке жестко соединены друг с другом, обычно одного из датчиков 8 числа оборотов достаточно для каждой поворотной тележки 3. Кроме того, датчики 8 числа оборотов соединены с системой 9 управления, в данном случае с системой управления торможением. При помощи этой системы 9 управления торможением соответствующим образом регулируется подаваемая на колеса 2 сила торможения для торможения транспортного средства 1.
Описанная до настоящего момента конструкция известна из общего уровня техники и потому является общепринятой, поэтому она не разъяснена в деталях.
Кроме того, рельсовое транспортное средство 1 имеет датчик 10 ускорения, который регистрирует ускорение транспортного средства 1. В частности, этот датчик ускорения может быть выполнен в виде трехмерного датчика 10 ускорения, как, например, известно из области систем управления безопасностью в легковых автомобилях и является общепринятым в этой области. При помощи этого датчика 10 ускорения могут быть очень точно и без задержки по времени определены возникающие положительные и отрицательные ускорения (ускорения и замедления) транспортного средства 1. Затем фактическое значение ускорения передается от датчика 10 ускорения системам 7, 9 управления. Параллельно этому система 7 управления тягой или система 9 управления торможением посредством датчиков 8 числа оборотов могут получить значение числа оборотов, из которого определяется ускорение приводимых или тормозимых колес 2. Затем в системах 7, 9 управления значения величин этих ускорений сравниваются между собой. Если определенное из полученной при помощи датчиков 8 числа оборотов величины ускорение приводимых колес 2 больше, чем ускорение транспортного средства 1, которое определяется при помощи датчика 10 ускорения, то приводимые колеса 2 в случае осуществления приведения в движение, или в случае ускорения, проворачиваются по отношению к рельсам S, и возникает так называемое боксование. В этом случае уменьшается сила тяги и повышается износ колес 2 и рельсов S. Таким образом, боксование приводимых колес 2 является нежелательным.
Тем не менее, при помощи сравнения величин двух ускорений такое боксование предельно быстро и надежно детектируется уже при очень малом боксовании. Система 7 управления тягой, которая также находится во взаимодействии с приводным механизмом 4 и узлом 5 трансмиссии, может в ответ на это уменьшить мощность привода для транспортного средства 1 до тех пор, пока ускорения вновь не станут равными друг другу и не будет достигнута допустимая величина скольжения. Таким образом, при помощи воздействия системы 7 управления тягой на приводной механизм 4 и/или узел 5 трансмиссии может осуществляться противодействие боксованию. Таким образом, улучшается эффективность использования требуемой и используемой для привода энергии, и уменьшается износ колес 2 и рельсов S.
Для уменьшения мощности привода при помощи системы 7 управления тягой могут быть осуществлены различные способы. Является особенно дешевым и эффективным, если система 7 управления тягой соответствующим образом уменьшает передаваемую приводным механизмом 4 мощность с функцией, в частности, линейной функцией по времени, например с наклонной зависимостью, чтобы предотвратить боксование приводимых колес 2. После того, как достигнута допустимая величина скольжения, мощность приводного механизма также с функцией по времени, например, с наклонной зависимостью, увеличивается до желаемого значения мощности. Чтобы иметь возможность соответствующим образом быстро реагировать, система 7 управления тягой может, кроме того, оказывать соответствующее воздействие на узел 5 трансмиссии, чтобы уменьшить поток мощности от приводного механизма 4 к приводимым колесам 2. В целом такие узлы 5 трансмиссии являются гидродинамическим элементом, то есть имеют, например, гидродинамическую муфту или, как описано здесь, гидродинамический преобразователь 6. За счет опорожнения гидродинамического преобразователя 6, то есть за счет выпуска рабочей среды в гидродинамическом преобразователе 6, может быть очень быстро осуществлено уменьшение подачи мощности привода на приводимые колеса 2, чтобы уменьшить или предотвратить боксование приводимых колес 2.
За счет опорожнения гидродинамического преобразователя 6 может быть очень быстро и безупречно достигнуто то, что мощность привода соответствующим образом уменьшается, в частности, до тех пор, пока не прекратится боксование, то есть пока не сравняются ускорения. Параллельно этому может быть уменьшена мощность приводного механизма 4, что обычно осуществляется медленнее, чем опорожнение гидродинамического преобразователя 6. После того, как боксование прекратилось, гидродинамический преобразователь 6 может быть снова наполнен и мощность приводного механизма 4, предпочтительно с наклонной зависимостью, может быть снова увеличена, пока не будет достигнута желаемая мощность.
Наряду с применением описанного здесь способа для предотвращения или уменьшения боксования, способ также может применяться для предотвращения или, по меньшей мере, минимизации скольжения при торможении транспортного средства 1. Для этого на чертеже представлена показанная независимо от системы 7 управления тягой система 9 управления торможением. На практике эти системы 7, 9 управления могут быть интегрированы в конструкцию. Посредством системы 9 управления торможением должно оказываться соответствующее влияние на силу торможения, которая воздействует на колеса 2 для их торможения. В рельсовых транспортных средствах для торможения обычно используются неизнашиваемые тормоза системы длительного торможения, фрикционные тормоза или также торможение посредством подачи энергии, которая генерируется, например, при помощи генератора или гидравлического агрегата, из аккумулятора или, в случае приводимого в движение от электричества локомотива, из электрической сети. Независимо от того, как вырабатывается сила для торможения, система 9 управления торможением должна оказывать соответствующее влияние на подаваемую на колеса 2 силу торможения. Поскольку способ, которым осуществляется торможение транспортного средства 1, не является предметом настоящего изобретения и не является существенным для настоящего изобретения, поток энергии при торможении символически отмечен лишь при помощи схематически показанного тормозного механизма 11, который соединен, соответственно, с тормозимыми колесами 2. При этом тормозной механизм 11 может содержать любые средства для торможения с регенерацией или без регенерации энергии.
При этом система 9 управления торможением управляет тормозным механизмом 11 таким образом, что на подаваемую на колеса 2 силу торможение оказывается соответствующее влияние. Здесь снова используется фактическое, измеренное датчиком 10 ускорения значение ускорения транспортного средства 1, которое также направляется в систему 9 управления торможением. Кроме того, система 9 управления торможением также располагает данными от датчиков 8 числа оборотов и, таким образом, может определять ускорение колес 2 при помощи датчиков 8 числа оборотов. Если при этом возникает отличие этих двух ускорений друг от друга в случае торможения транспортного средства 1, то обычно имеет место скольжение, при котором колеса 2 частично блокируются. Если бы в предельном случае возникла полная блокировка колес 2, то следовало бы ожидать немедленного повреждения колес 2 за счет образования на них пробуксовины. Поэтому при торможении транспортного средства 1 необходимо предотвратить это скольжение. При помощи этой разницы ускорений в этом отношении является возможным определить наличие скольжения, как только оно возникает. Всегда, когда замедление колес 2 меньше, чем фактическое замедление транспортного средства 1, или абсолютная величина замедления колес 2 больше, чем абсолютная величина фактического замедления транспортного средства 1, имеет место скольжение. Благодаря очень точным результатам измерений, полученным от датчика 10 ускорения, может быть зарегистрировано даже незначительное скольжение и может быть осуществлено противодействие скольжению, в ходе чего система 9 управления торможением соответствующим образом уменьшает силу торможения до тех пор, пока не пропадет скольжение, то есть пока не исчезнет разница ускорений.
Описанный способ может применяться, в частности, на локомотивах, у которых, как представлено здесь, все колеса 2 являются приводимыми. Принципиально он может быть использован также в том случае, когда приводимыми являются не все колеса 2, но рельсовое транспортное средство 1 имеет приводимые и неприводимые оси, как, например, в случае моторного вагона.
Разумеется, возможно также математически перевести величину ускорения, полученную датчиком 10 ускорения, в величину скорости и затем сравнить ее с величиной скорости колес 2, которая может быть определена из числа оборотов колес 2. Принцип изобретения также аналогично работал бы при такого рода сравнении скоростей.
Изобретение относится к области рельсовых транспортных средств. На приводимое/тормозимое колесо подается мощность для приведения в движение или торможения транспортного средства, причем изменение числа оборотов приводимого/тормозимого колеса регистрируется опосредованно, и с системой управления для воздействия на мощность для приведения в движение или на силу для торможения транспортного средства. Транспортное средство имеет датчик ускорения, при помощи которого регистрируется ускорение транспортного средства. Из изменения числа оборотов приводимого/тормозимого колеса вычисляется ускорение приводимого/тормозимого колеса. Система управления мощностью и/или силой осуществляет согласование, если ускорение приводимого/тормозимого колеса отличается от ускорения транспортного средства. Достигается предотвращение или минимизация буксования и скольжение и, таким образом, обеспечение улучшения использования энергии привода или щадящего режима торможения рельсового транспортного средства. 8 з.п. ф-лы, 1 ил.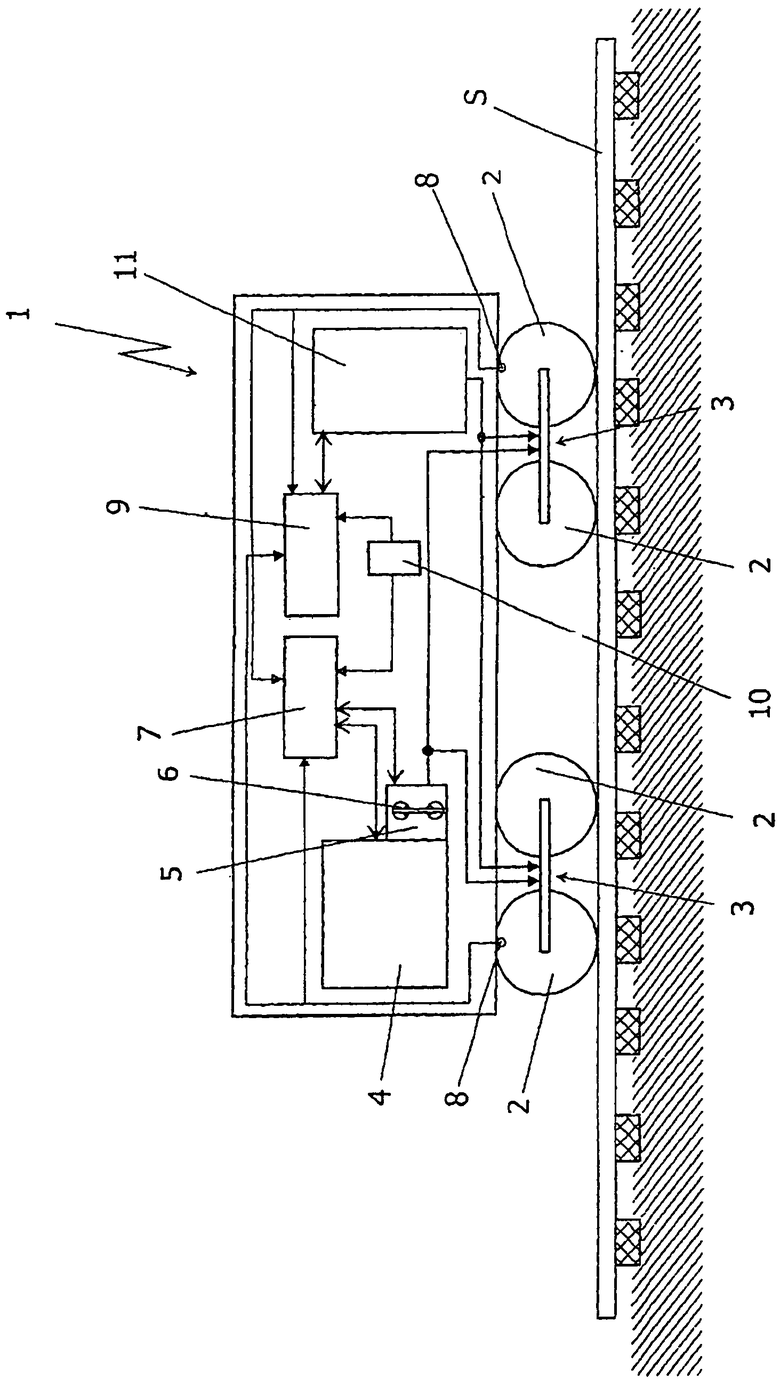
1. Способ управления рельсовым транспортным средством (1)
с несколькими колесами (2);
по меньшей мере, с одним приводимым/тормозимым колесом (2), на которое подается мощность для приведения в движение или торможения транспортного средства (1); причем
изменение числа оборотов приводимого/тормозимого колеса регистрируется, по меньшей мере, опосредованно; и
с системой управления для воздействия на мощность для приведения в движение или на силу для торможения транспортного средства (1), отличающийся тем, что
транспортное средство (1) имеет датчик (10) ускорения, при помощи которого регистрируют ускорение транспортного средства;
из изменения числа оборотов приводимого/тормозимого колеса (2) вычисляют ускорение приводимого/тормозимого колеса (2); и
система управления мощностью и/или силой осуществляет согласование, если ускорение приводимого/тормозимого колеса (2) отличается от ускорения транспортного средства (1).
2. Способ по п. 1, отличающийся тем, что мощность для приведения в движение транспортного средства (1) или сила для торможения транспортного средства (1) уменьшается, если величина ускорения приводимого/тормозимого колеса (2) больше величины ускорения транспортного средства (1).
3. Способ по п. 2, отличающийся тем, что уменьшение мощности или силы осуществляется с функцией, в частности, линейной функцией по времени.
4. Способ по п. 2 или 3, отличающийся тем, что уменьшенная мощность для приведения в движение транспортного средства (1) или уменьшенная сила для торможения транспортного средства (1) вновь увеличивается, если разница между ускорениями становится меньше.
5. Способ по любому из пп. 1-3, отличающийся тем, что в транспортном средстве мощность для приведения в движение транспортного средства (1) и/или сила для торможения транспортного средства приложена ко всем колесам (2).
6. Способ по п. 1, отличающийся тем, что в качестве датчика (10) ускорения в транспортном средстве (1) используется датчик для определения ускорения в трех пространственных направлениях.
7. Способ по п. 1, отличающийся тем, что изменение числа оборотов, по меньшей мере, одного приводимого/тормозимого колеса (2) регистрируется посредством датчика (8) числа оборотов.
8. Способ по п. 7, отличающийся тем, что датчик (8) числа оборотов расположен, по меньшей мере, на одном приводимом/тормозимом колесе (2) транспортного средства (1), на несущей это колесо (2) оси или на оси несущей это колесо (2) поворотной тележки.
9. Способ по п. 7, отличающийся тем, что датчик (8) числа оборотов расположен на выходном валу механизма (5) смены ходовых ступеней транспортного средства (1).
| US 6152546 A, 28.11.2000; | |||
| ГРАНУЛЯТОР | 2014 |
|
RU2591962C1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| DE 102005001403 A1, 27.07.2006 | |||
| DE 19927225 C1, 09.11.2000 | |||
| DE 19735562 A1, 18.02.1999 | |||
| DE 19612222 A1, 02.10.1996 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2006 |
|
RU2392140C2 |

