Изобретение относится к самолетам всех типов и особенно к беспилотникам с электродистанционным управлением аэродинамической схемы «регрессивная флюгерная утка».
Известны самолеты с управлением «утка», см., например, пат. №2410286. Для образования регрессивного закона управления при электродистанционной конструкции управления в нем использован активный или реактивный резистор со средней точкой.
Задача и технический результат изобретения - расширение арсенала технических средств, упрощение конструкции, повышение надежности.
Для этого данная электродистанционная система управления имеет передний горизонтальный руль и содержит задатчик положения руля, датчик положения руля и датчик вертикального скольжения, входы которых соединены с усилителем с тремя входами, а выход усилителя соединен с исполнительным механизмом рулей, причем на начальном этапе повышения вертикального скольжения, когда направления отклонения датчика вертикального скольжения и горизонтального руля разнонаправлены, сигналы с датчиков обратны по знаку сигналу задатчика (то есть для увеличения тангажа сигнал задатчика положительный, считая от предыдущего уровня, а сигналы обоих датчиков при увеличении тангажа отрицательные, но при отклонении сигнала датчика вертикального скольжения больше уровня сигнала задатчика, сигналы датчиков становятся противоположны по знаку, причем знак датчика положения руля при этом совпадает со знаком задатчика).
Это управление особенно целесообразно на беспилотниках, где управление осуществляется с помощью радиоволн и сигнал с задатчика естественным образом имеет вид меняющегося напряжения.
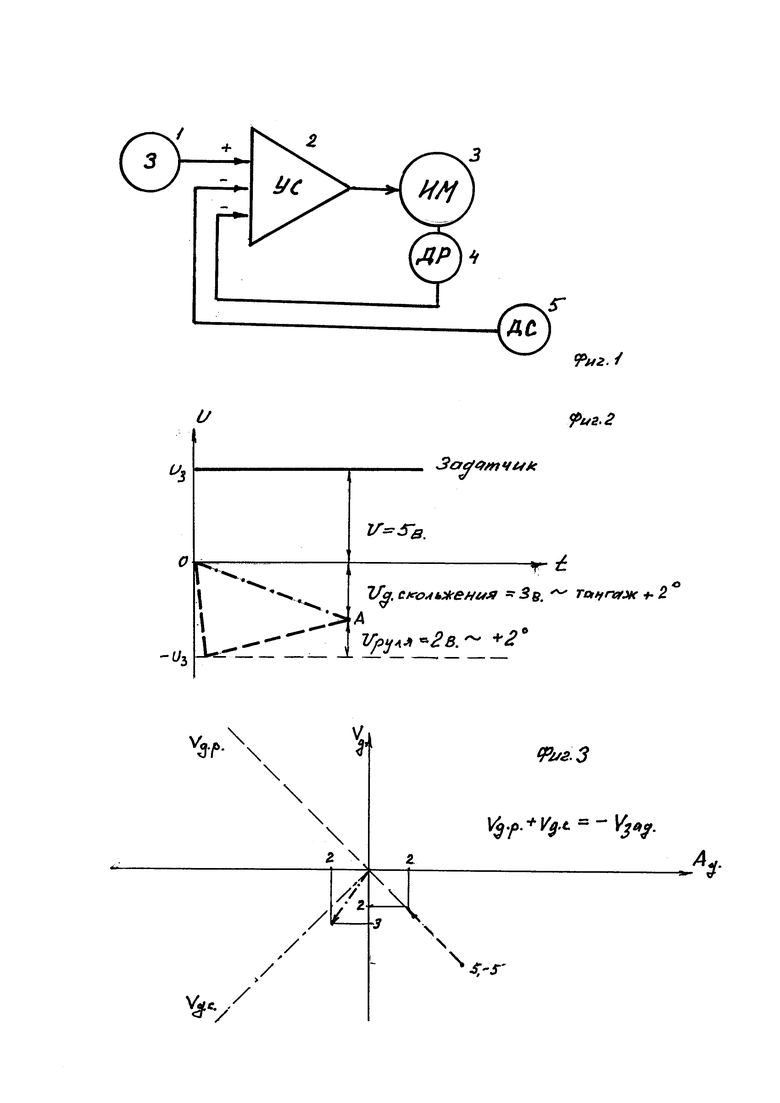
На фиг. 1 показана данная система управления, а на фиг. 2, 3 - ее работа. Система содержит задатчик З - 1, усилитель УС - 2, исполнительный механизм руля ИМ - 3, датчик положения руля ДР - 4 и датчик вертикального скольжения ДС - 5.
Работает управление следующим образом. Для простоты примем, что начальные условия равны нулю (задатчик и все датчики показывают 0). Допустим, летчик или оператор беспилотника задали задатчику руля З - 1 положение +5 градусов, выражающееся в масштабе: 1 вольт соответствует 1 градусу (далее 1 В/град) То есть задатчик выдает на усилитель УС - 2 напряжение +5 вольт, см. фиг. 2 - верхняя сплошная линия. Чувствительность датчика положения руля ДР - 4 должна быть согласована с задатчиком, то есть равна масштабу задатчика, то есть тоже 1 В/град (иначе, получив команду 5 градусов, исполнительный механизм будет крутить руль до тех пор, пока датчик положения руля не покажет 5 вольт, а угол отклонения руля при этом может оказаться совсем другой).
Исполнительный механизм ИМ - 3 через усилитель УС - 2 сразу начинает отрабатывать сигнал задатчика З - 1 до тех пор, пока сигнал с датчика ДР - 4 не возрастает до -5 вольт (нижняя точка пунктирной линии на фиг. 2), то есть руль повернулся на +5 градусов. После чего дальнейшая работа ИМ - 3 прекращается.
Но тут начинает реагировать на отклонение горизонтального руля самолет, и его тангаж и вертикальное скольжение увеличиваются (штрихпунктирная линия на графике V-T, то есть «напряжение-время»). Допустим, чувствительность датчика скольжения ДС - 5 равна 1,5 В/град. Тогда по мере увеличения отрицательного сигнала датчика скольжения на нижнем входе усилителя УС - 2 появляется отрицательный сигнал, и усилитель дает сигнал исполнительному механизму ИМ - 3 уменьшить угол атаки рулей. Так как сигнал с датчика руля ДР - 4 уменьшается, а сигнал с датчика вертикального скольжения ДС - 5 увеличивается (оба при этом являются отрицательными к знаку сигналу задатчика), то вскоре наступает равновесие - сумма сигналов с датчиков становится равна и противоположна по знаку сигналу с задатчика (фиг. 2, точка «А»). Конкретное положение точки равновесия определить невозможно - оно зависит от свойств продольной устойчивости самолета. Но допустим, на сигнал датчика руля приходится -2 вольта, то есть его отклонение +2 градуса, а датчик скольжения выдает -3 вольта, то есть вертикальное скольжение составляет 2 градуса. Самолет при этом летит в установившемся режиме с углом атаки +2 градуса, а рули при этом находятся в положении +2 градуса к планеру самолета, который в свою очередь имеет угол атаки +2 градуса. Итого угол атаки горизонтального руля относительно потока уменьшился до +4 градусов, вместо первоначальных +5 градусов. Это и есть регрессивность управления «утки» - когда при увеличении вертикального скольжения угол атаки горизонтального руля относительно потока автоматически уменьшается.
Регулируя соотношение чувствительностей датчиков ДР и ДС и сами чувствительности, можно регулировать интенсивность управления. Нужная резкость управления подбирается исходя из выноса центра масс самолета относительно его аэродинамического фокуса (продольная устойчивость должна быть положительной).
Более интересно рассмотреть диаграмму Vд-Ад (напряжение - угол отклонения датчиков) на фиг. 3. Диаграмма представляет собой два графика, которые соответствуют друг другу при выполнении условия Vдр+Vдс=-Vзадат., где: Vдр - напряжение на датчике положения руля, Vдс - напряжение на датчике вертикального скольжения, и Vзадат. - напряжение задатчика.
Начнем рассматривать диаграмму с начальной точки «отклонение руля на +5 градусов» (точка 5, -5 на диаграмме справа внизу). Самолет начинает реагировать на это отклонение руля, и появляется вертикальное скольжение - штрихпунктирная стрелка слева внизу. По мере роста на датчике скольжения отрицательного напряжения руль возвращается ближе к нейтральному положению, это - пунктирная стрелка от точки 5, -5. При этом все время с помощью усилителя и исполнительного механизма сохраняется упомянутая выше сумма напряжений. Но вот наступает равновесие в той же точке, что и на фиг. 2, а именно: отклонение руля +2 градуса (напряжение -2 В), вертикальное скольжение тоже +2 градуса (напряжение -3 В). Это положение и показано на диаграмме.
Интересен анализ диаграммы на фиг. 3. Если чувствительность датчика скольжения будет равна 0 (горизонтальная линия, совпадающая с осью абсцисс), то при изменении вертикального скольжения горизонтальный руль не сдвинется с точки 5, -5, и это будет режим «классической утки». Если чувствительность датчика скольжения (тонкая штрихпунктирная линия слева внизу) будет равна чувствительности датчика положения руля (тонкая пунктирная линия слева вверху, являющаяся продолжением с другим знаком при переходе через ноль пунктирной стрелки от точки 5, -5), то это будет управление «флюгерная утка», то есть при любом скольжении (хоть до +120 градусов при «кобре») руль всегда будет под постоянным углом к потоку. А если чувствительность датчика вертикального скольжения будет больше чувствительности датчика положения руля (в данном примере 1,5 В/град), то это будет «регрессивная флюгерная утка».
Кстати, датчиком положения руля и датчиком вертикального скольжения может быть одна и та же конструкция датчика, просто напряжение питания на датчик скольжения подается больше.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2012 |
|
RU2531706C2 |
| САМОЛЕТ СТАРОВЕРОВА (ВАРИАНТЫ) | 2011 |
|
RU2490169C2 |
| УПРАВЛЕНИЕ "УТКА" -2 /ВАРИАНТЫ/ | 2012 |
|
RU2515817C2 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2007 |
|
RU2410286C2 |
| УПРАВЛЕНИЕ "УТКА" - 3 | 2012 |
|
RU2515818C2 |
| Боевой беспилотный самолёт /варианты/ | 2016 |
|
RU2622327C1 |
| ПРОТИВОСАМОЛЕТНАЯ РАКЕТА | 2009 |
|
RU2439476C2 |
| Самолёт дальнего радиолокационного обнаружения | 2016 |
|
RU2639374C1 |
| СИСТЕМА НАВЕДЕНИЯ ПРОТИВОСАМОЛЕТНЫХ РАКЕТ | 2009 |
|
RU2400690C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2504815C2 |
Изобретение относится к системам управления самолетом, выполненным по схеме «регрессивная флюгерная утка». Система управления передним горизонтальным оперением «утка» содержит задатчик положения руля, датчик положения руля, датчик вертикального скольжения, усилитель с тремя входами, исполнительный механизм рулей, соединенные определенным образом. Обеспечивается повышение надежности и упрощение конструкции самолета. 2 з.п. ф-лы, 3 ил.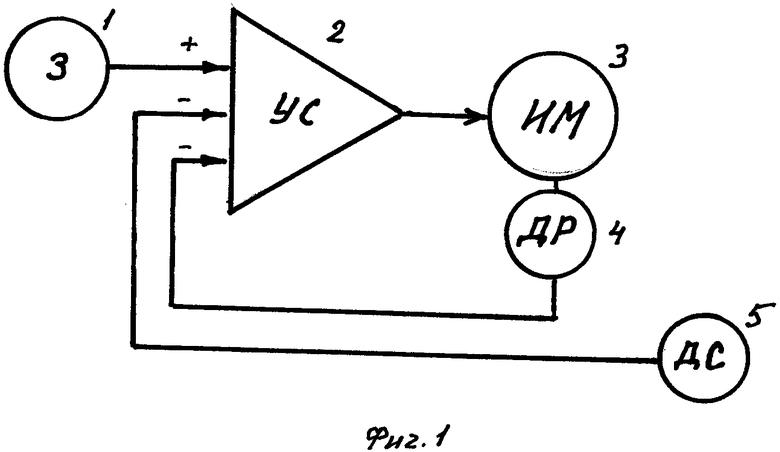
1. Система управления передним горизонтальным оперением «утка» содержит задатчик положения руля, датчик положения руля и датчик вертикального скольжения, входы которых соединены с усилителем с тремя входами, а выход усилителя соединен с исполнительным механизмом рулей, причем на начальном этапе повышения вертикального скольжения, когда направления отклонения датчика вертикального скольжения и горизонтального руля разнонаправлены, сигналы с датчиков обратны по знаку сигналу задатчика.
2. Система управления по п. 1, отличающаяся тем, что чувствительность датчика положения руля равна масштабу задатчика.
3. Система управления по п. 1, отличающаяся тем, что чувствительность датчика вертикального скольжения больше чувствительности датчика положения руля.
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2007 |
|
RU2410286C2 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2012 |
|
RU2531706C2 |
| US 4825375 A1, 25.04.1989 | |||
| US 4598888 A1, 08.07.1986. | |||

