Область техники, к которой относится изобретение
Заявляемое изобретение относится к способам определения местоположения объектов их форм и нанесения их на карту, точнее к способам лазерной локации, и представляет интерес для лазерной локации наземных объектов, поверхности Земли с подвижного носителя, лазерной геодезии.
Уровень техники
Известен способ определения расстояния до объекта, основанный на облучении его лазерным импульсом, прием отраженного или рассеянного объектом излучения и определения времени задержки Тз между моментами излучения зондирующего и приема отраженного или рассеянного объектом импульса или импульсов, при таком режиме расстояние до объекта L определяется по формуле L=(с*Тз)/(2*n), где c - скорость света, n - показатель преломления среды, в которой распространяется посланный и отраженный (рассеянный) лазерный импульс (Козинцев В.И. Основы импульсной лазерной локации. МГТУ им. Н.Э. Баумана, 2010 г., 276 с.).
Достоинством этого способа является возможность определять расстояние до удаленных объектов с высокой точностью, которая определяется быстродействием приемной системы и возможностью излучателя лазерного локатора генерировать короткие импульсы с коротким передним фронтом. При существующем уровне быстродействия приемной системы на уровне ~0,1 нс расстояние может быть определено с точностью несколько сантиметров.
Недостатком этого способа является невозможность определения направления на исследуемый объект. Данный способ можно модифицировать и генерировать мощный лазерный импульс, который сразу «засвечивает» значительное угловое поле пространства, в котором находится лоцируемый объект. Это позволяет определить расстояние до объекта и положение объекта в пространстве, если идет прием на многоэлементный приемник. Необходимость использования лазерных импульсов с высокой энергией является значительным недостатком модифицированного способа, поскольку требует достаточно мощного и относительно громоздкого лазерного источника.
Прототипом является способ лазерной локации, включающий сканирование пространства последовательностью цугов лазерных импульсов с изменяемым временем между импульсами или интенсивностью импульсов в цуге, генерируемых лазерным локатором, регистрацию рассеянного (отраженного) объектом лазерного излучения, определение расстояния до объекта по времени задержки между излученным и принятым импульсами, а углового положения объекта по направлению излученного импульса (Патент RU 2456637, опубл. 20.07.2012).
В известном способе сканирующее устройство осуществляет поворот в пространстве зондирующего лазерного луча по заданной траектории. Использование известного способа позволяет определить не только расстояние до объекта, но и его угловое положение в пространстве.
Основным недостатком известного способа является его низкая производительность при определении дальности и положения объекта. Причина заключается в необходимости излучать следующий лазерный импульс после того, как зафиксирован отраженный или рассеянный импульс объектом предшествующего импульса. Указанное ограничение обработки сигнала определяет максимальную частоту следования лазерных импульсов на уровне fmax=c/2L. Например, если объект расположен на расстоянии до 2 км, то максимальная частота работы лазерного локатора составит 75 кГц. Вышерассмотренная причина ограничивает, в том числе, рабочую частоту и производительность лазерных локаторов, применяемых для лазерного зондирования земной поверхности, поскольку каждый следующий зондирующий импульс может быть излучен только после того, как зарегистрирован предыдущий отраженный импульс.
Задачей изобретения является повышение производительности способа при определении дальности и положения объекта.
Раскрытие изобретения
Для решения поставленной задачи предложен способ лазерной локации, включающий сканирование пространства последовательностью лазерных сигналов, генерируемых лазерным локатором, регистрацию рассеянных и/или отраженных объектом лазерных сигналов, определение расстояния до объекта по времени задержки между излученными и принятыми сигналами, а углового положения объекта по направлению соответствующего излученного сигнала. В отличие от прототипа в качестве генерируемого лазерным локатором сигнала используют лазерные импульсы с изменяемой длиной волны, различаемые по длине волны на величину, определяемую приемной системой лазерного локатора.
Излучение импульсов на разных длинах волн может производиться последовательно или одновременно.
В предпочтительном варианте регистрацию рассеянных и/или отраженных объектом лазерных сигналов осуществляют приемной системой, содержащей один или более приемников лазерного излучения.
Приемник лазерного излучения выполнен одноэлементным или многоэлементным.
Техническим результатом, достигаемым настоящим изобретением, является повышение производительности и информативности лазерного радара.
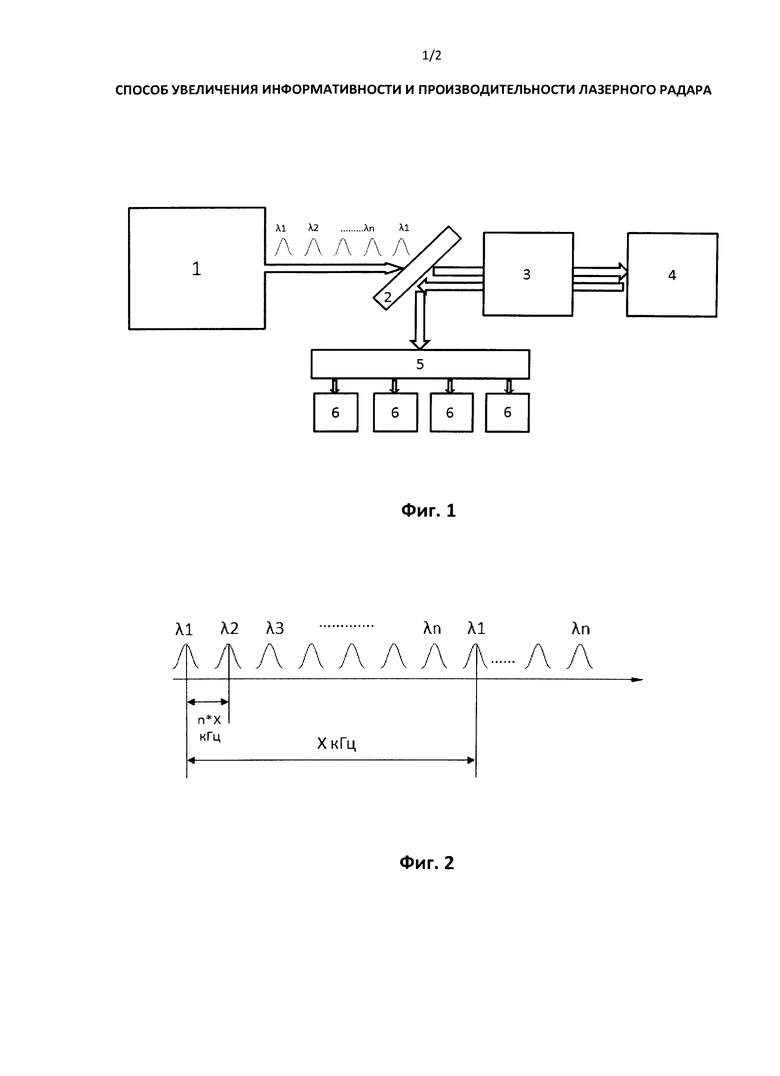
На Фиг. 1 представлена схема устройства лазерной локации, реализующего заявленный способ.
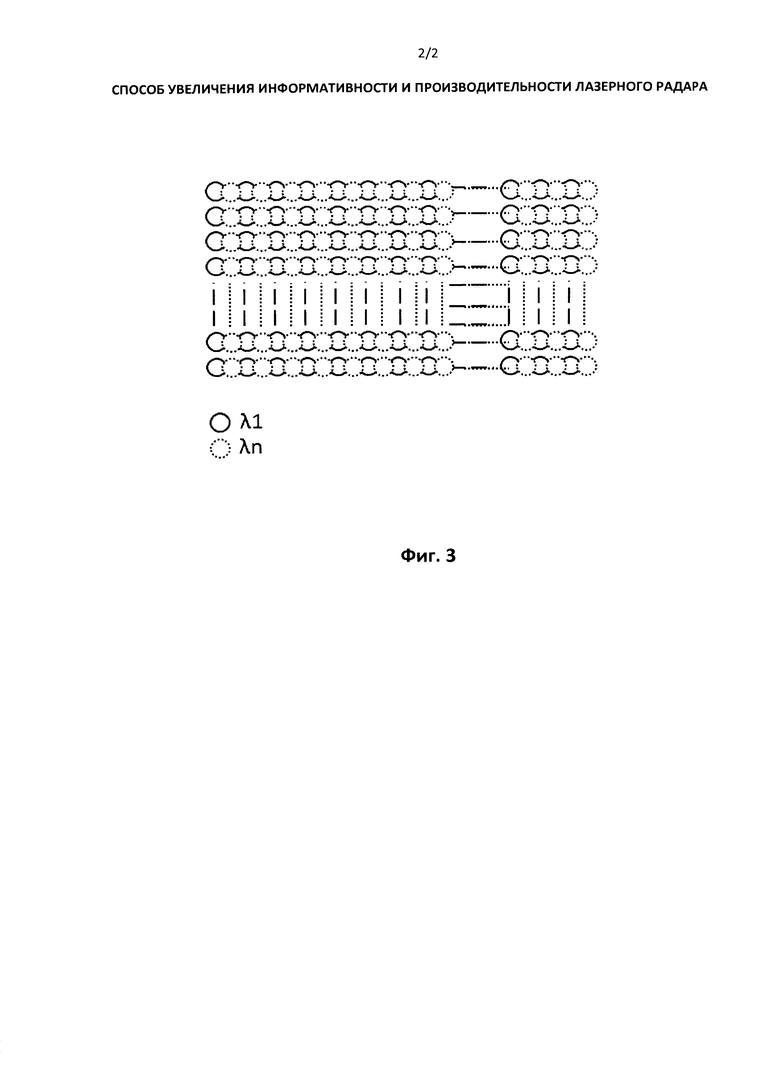
На Фиг. 2 представлен один из вариантов последовательности следования импульсов с разными длинами волн и соотношение общей частоты следования импульсов относительно частоты следования одной длины волны.
На Фиг. 3 представлено распределение точек на объекте при многоволновом сканировании.
Осуществление изобретения
Способ лазерного сканирования представлен на Фиг. 1. Способ заключается в следующем. Излучатель 1 лазерного локатора генерирует последовательность лазерных импульсов. Длина волны каждого импульса изменяется в соответствии с заданной последовательностью. Лазерные импульсы на различных длинах волн могут излучаться последовательно или одновременно.
Частота следования импульсов на каждой длине волны определяется максимальным расстоянием для однозначного определения расстояния до объекта и в общем случае равна X кГц, тогда при последовательном излучении импульсов на различных длинах волн, время между ними будет определяться частотой n*Х кГц, где n - количество длин волн, генерируемых излучателем локатора (см. Фиг. 2). Таким образом, общая частота следования импульсов лазерного излучения будет равна n*X кГц.
Оптическое излучение, генерируемое излучателем 1 лазерного локатора, поступает на разделитель 2 приемного и передающего тракта, который может быть выполнен на объемной или волоконной оптике, поступает на сканирующее устройство 3, предназначенное для направления зондирующего излучения на объект 5. Оптические импульсы, отраженные и/или рассеянные объектом 4, поступают обратно на сканирующее устройство 3, которое направляет их на разделитель 2 приемного и передающего тракта. Излучение, отраженное и/или рассеянное объектом 4 и собранное сканирующим устройством 3, разделителем 2 приемного и передающего тракта, направляется на селектор 5 длин волн, который может быть выполнен как с использованием стандартных диспергирующих элементов типа дифракционной решетки или призмы, так и с использованием оптоволоконных элементов. Селектор длин волн разделяет импульсы по длинам волн и направляет их на приемники 6 оптического излучения.
Приемник 6 может быть один или несколько, максимальное количество приемников определяется количеством длин волн, генерируемых лазерным источником 1 локатора. В схеме с использованием одного приемника его тип может быть многоэлементным в виде матрицы или линейки приемных элементов.
При лазерном зондировании происходит сканирование лазерного луча в пространстве с помощью сканирующего устройства 3. В зависимости от скорости сканирования направления лазерного луча, частоты следования импульсов лазерного источника, расходимости лазерного луча, определяющей размер лазерного пятна на объекте, количество точек на объекте может изменяться в больших пределах. В некоторых случаях необходимо иметь высокое значение плотности точек на длину или площадь для возможности определения малых объектов, например тонких проводов и т.д.
Для примера рассмотрим сканирование в одном направлении. Расстояние между точками на объекте определяется следующей зависимостью:

где sigma - угловая расходимость лазерного излучения, PRF - частота следования импульсов излучателя лазерного локатора, w - угловая скорость сканирования, R - дистанция до объекта.
Данное выражение можно переписать в следующем виде:

На Фиг. 2 видно, что для одноволнового зондирования расстояние между точками на объекте определяется частотой X кГц, а в случае многоволнового зондирования, предлагаемого в данном методе, n*X кГц. Таким образом, расстояние между точками на объекте уменьшается пропорционально количеству длин волн, тем самым увеличивая плотность точек на единицу расстояния на объекте, что приводит к увеличению информативности лазерного сканирования. На Фиг. 3 представлено распределение точек на объекте при многоволновом сканировании.
Реализация заявляемого технического решения для описанного выше примера локации земной поверхности или объекта, находящегося на расстоянии 2 км, может быть, например, следующей: излучатель лазерного локатора на частоте 75 кГц генерирует последовательность импульсов с длиной волны λ1, также с частотой 75 кГц генерируется последовательность лазерных импульсов с длиной волны λ2, аналогичные параметры серии импульсов для λ3 и λn. Импульсы на разных длинах волн могут излучаться последовательно или одновременно. Излучение, через разделитель приемного и передающего канала, который может быть выполнен на открытой оптике или волоконной оптике, а также по бистатической схеме, когда излучатель и приемник разнесены в пространстве, поступает на сканирующее устройство, которое может и отсутствовать, далее взаимодействуя с объектом, отражается или рассеивается, проходя через указанный сканер, собирается приемным каналом лазерного локатора и поступает на селектор длин волн, который может быть выполнен на открытой оптике с использованием дисперсионных элементов или оптоволоконной техники. При таком режиме работы, в приемном канале происходит разделение длин волн и каждая из них детектируется отдельным приемником.
Подобная модернизация известного способа позволяет многократно, в соответствии с количеством используемых длин волн, увеличить производительность лазерной локации. Использование данного способа позволяет либо повысить плотность точек в n-раз на объекте, что важно при зондировании поверхности Земли или большого объекта, либо повысить скорость сканирования и, следовательно, частоту обновления информации, при последнем необходимо увеличить поле зрения приемной системы в n-раз.
Выбор фиксированных длин волн осуществляется согласно рекомендованной сетке длин волн Международного Телекоммуникационного Союза (ITU GRID), используемой в технологии Спектрального Уплотнения Каналов (Dense Wavelength Division Multiplexing (DWDM)). Разница двух длин волн определяется фиксированным расстоянием между каналами согласно рекомендациям ITU, в частности 12.5 (0.1 нм), 25 (0.2 нм), 50 (0.4 нм), 100 (0.8 нм) или 200 (1.6 нм) ГГц. Графически это представлено на примере 100 ГГц сетки на рисунке X.
Выбор длин волн в конкретном случае обусловлено параметрами усилителя, пропусканием атмосферы и т.д. В частности, для 100 ГГц сетки длины волн находятся в пределах от 14 92.25 нм до 1611.7 9 нм.
Для 12.5 ГГц систем длины волн определяются по формуле:
193.1+n×0.0125, где n - положительное или отрицательное целое число, включая 0.
Для 25 ГГц систем длины волн определяются по формуле:
193.1+n×0.025, где n - положительное или отрицательное целое число, включая 0.
Для 50 ГГц систем длины волн определяются по формуле:
193.1+n×0.05, где n - положительное или отрицательное целое число, включая 0.
Для 100 ГГц систем длины волн определяются по формуле:
193.1+n×0.1, где n - положительное или отрицательное целое число, включая 0.
Для 2 00 ГГц систем длины волн определяются по формуле:
193.1+n×0.2, где n - положительное или отрицательное целое число, включая 0.
Для перевода частоты в длину волны по формуле λ=c/ν, где λ - длина волны, ν - частота в Гц, необходимо использовать c - скорость света, равную 2.99792458 x 108 m/s. Например, каналу 35 (100 ГГц сетка) соответствует длина волны 1549.32 нм.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ | 2010 |
|
RU2456637C1 |
| Система импульсной лазерной локации | 2017 |
|
RU2660390C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2528109C1 |
| СПОСОБ ПОЛУЧЕНИЯ ПРОСТРАНСТВЕННОЙ МОДЕЛИ ОКРУЖАЮЩЕЙ ОБСТАНОВКИ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ НА ОСНОВЕ ДАННЫХ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2679923C1 |
| СПОСОБ И УСТРОЙСТВО ОПТИЧЕСКОЙ ЛОКАЦИИ С ПОМОЩЬЮ СЕНСОРА УЛЬТРАФИОЛЕТОВОГО ИЗЛУЧЕНИЯ | 2009 |
|
RU2433424C2 |
| СПОСОБ ДОСТАВКИ НА ЦЕЛЬ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 1987 |
|
SU1839888A1 |
| УЛЬТРАЗВУКОВОЙ МИКРОСКОП | 2005 |
|
RU2270997C1 |
| ДОППЛЕРОВСКИЙ ЛАЗЕРНЫЙ ЛОКАТОР | 1977 |
|
SU1840483A1 |
Способ увеличения информативности и производительности лазерной локации включает в себя сканирование пространства последовательностью лазерных сигналов, генерируемых лазерным локатором, регистрацию рассеянных и/или отраженных объектом лазерных сигналов, определение расстояния до объекта по времени задержки между излученными и принятыми сигналами. Угловое положение объекта определяют по направлению соответствующего излученного сигнала. При этом в качестве сканирующего лазерного излучения используют последовательность лазерных импульсов, различающихся по длине волны, поступающих на сканирующее устройство. Лазерные импульсы разделяют по длинам волн посредством селектора длин волн. Технический результат заключается в повышении производительности и информативности лазерного радара. 7 з.п. ф-лы, 3 ил.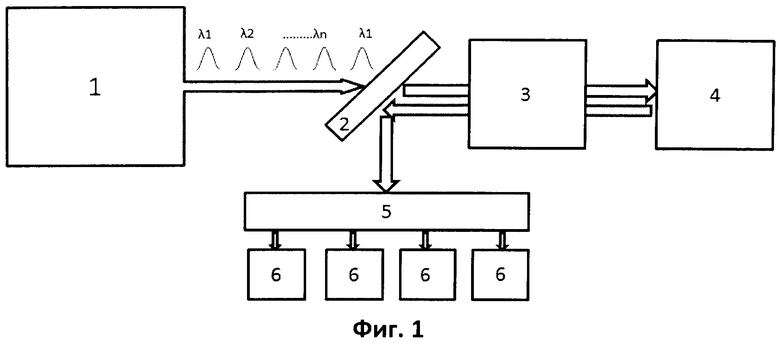
1. Способ увеличения информативности и производительности лазерной локации, включающий сканирование пространства последовательностью лазерных сигналов, генерируемых лазерным локатором, регистрацию рассеянных и/или отраженных объектом лазерных сигналов, определение расстояния до объекта по времени задержки между излученными и принятыми сигналами, а углового положения объекта по направлению соответствующего излученного сигнала, отличающийся тем, что в качестве сканирующего лазерного излучения используют последовательность лазерных импульсов, различающихся по длине волны, поступающих на сканирующее устройство, при этом упомянутые лазерные импульсы разделяют по длинам волн посредством селектора длин волн.
2. Способ по п. 1, отличающийся тем, что селектор длин волн выполнен в виде дифракционной решетки.
3. Способ по п. 1, отличающийся тем, что селектор длин волн выполнен в виде призмы.
4. Способ по п. 1, отличающийся тем, что селектор длин волн выполнен на основе волоконной оптики.
5. Способ по п. 1, отличающийся тем, что излучение импульсов на разных длинах волн производится последовательно.
6. Способ по п. 1, отличающийся тем, что излучение импульсов на разных длинах волн производится одновременно.
7. Способ по п. 1, отличающийся тем, что регистрацию рассеянных и/или отраженных объектом лазерных сигналов осуществляют приемной системой, содержащей один или более приемников лазерного излучения.
8. Способ по п. 4, отличающийся тем, что приемник лазерного излучения выполнен многоэлементным.
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ | 2010 |
|
RU2456637C1 |
| US 20110116072 A1, 19.05.2011 | |||
| WO 2008107409 A1, 12.09.2008 | |||
| КОЛОДОЧНЫЙ ТОРМОЗ | 0 |
|
SU348790A1 |

