ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству торможения для бесщеточного электродвигателя, которое генерирует силу торможения посредством создания короткого замыкания между контактами бесщеточного электродвигателя, и приводимому в действие электродвигателем инструменту, обеспеченному этим устройством торможения.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Например, в электрическом оборудовании, раскрытом в публикации нерассмотренной заявки на патент Японии No. 3-74194, при замедлении или остановке вращения трехфазного бесщеточного электродвигателя, используется так называемый тормоз короткого замыкания, который вызывает короткое замыкание между всеми контактами электродвигателя для того, чтобы генерировать силу торможения.
В тормозе короткого замыкания, например, три переключающих элемента (так называемые переключатели нижней стороны), обеспеченных в цепи проводимости между каждым контактом электродвигателя и отрицательным электродом источника питания постоянного тока, включаются, а другие три переключающих элемента (так называемый переключатель верхней стороны), обеспеченных в цепи проводимости между каждым контактом электродвигателя и положительным электродом источника питания постоянного тока, выключаются, тем самым, заставляя трехфазный бесщеточный электродвигатель генерировать силу торможения.
В соответствии с тормозом короткого замыкания, является возможным тормозить (замедлять или останавливать) электродвигатель только посредством включения/выключения переключающих элементов, использующихся при управлении проводимостью электродвигателя.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В вышеописанном тормозе короткого замыкания, однако, сила торможения генерируется посредством протекания электрического тока во все фазы электродвигателя. Таким образом, сила торможения становится такой большой, что усилие, прикладываемое к электрическому оборудованию посредством силы торможения, является большим, и иногда в электрическом оборудовании возникают дефекты.
Например, в перезаряжаемой газонокосилке, которая вращает вращательное режущее полотно посредством трехфазного бесщеточного электродвигателя, если вращение электродвигателя останавливается посредством вышеописанного тормоза короткого замыкания, имеет место проблема, в которой сила торможения является такой большой, что гайки, винты и тому подобное, использующиеся для монтажа вращательного режущего полотна, ослабляются.
Дополнительно, если торможение выполняется посредством вышеописанного тормоза короткого замыкания, например, в перезаряжаемой дисковой пиле, которая вращает дисковую пилу с высокой частотой вращения посредством трехфазного бесщеточного электродвигателя, сила торможения является такой большой, что также имеют место проблемы, в которых тормозная реакция является такой большой, что ощущение использования пользователем ухудшается.
В одном аспекте настоящего изобретения, является желательным, чтобы имелась возможность сдерживать силу торможения, генерируемую в бесщеточном электродвигателе посредством тормоза короткого замыкания.
Один аспект настоящего изобретения обеспечивает устройство торможения для трехфазного бесщеточного электродвигателя, который обеспечен в приводимом в действие электродвигателем инструменте и имеет три контакта. Устройство торможения включает в себя переключающую схему и устройство управления торможением. Переключающая схема включает в себя шесть переключающих элементов. Шесть переключающих элементов обеспечены в цепи проводимости стороны положительного электрода, которая соединяет три контакта со стороной положительного электрода источника питания постоянного тока, и в цепи проводимости стороны отрицательного электрода, которая соединяет три контакта со стороной отрицательного электрода источника питания постоянного тока, и выполнены с возможностью обеспечивать проводимость или прерывать каждую из цепи проводимости стороны положительного электрода и цепи проводимости стороны отрицательного электрода. Устройство управления торможением сконфигурировано с возможностью выполнения управления торможением, причем сила торможения генерируется в трехфазном бесщеточном электродвигателе посредством управления состоянием "включено"/"выключено" шести переключающих элементов, когда одна из команды останова и команды замедления трехфазного бесщеточного электродвигателя подается при вращении трехфазного бесщеточного электродвигателя. Устройство управления торможением дополнительно сконфигурировано с возможностью выполнения управления коротким замыканием двух фаз, причем состояние "включено"/"выключено" каждого из шести переключающих элементов устанавливается таким образом, что две из трех цепей проводимости, составляющих одну из цепи проводимости стороны положительного электрода и цепи проводимости стороны отрицательного электрода, находятся в проводящем состоянии, а другая из трех цепей проводимости находится в непроводящем состоянии при управлении торможением.
В таком устройстве торможения, сила торможения, генерируемая в трехфазном бесщеточном электродвигателе, может быть уменьшена, и возникновение дефектов в приводимом в действие электродвигателем инструменте вследствие чрезмерной силы торможения может сдерживаться.
При выполнении управления коротким замыканием двух фаз настоящего изобретения, создается период, во время которого, хотя электрический ток, который варьируется в зависимости от вращения трехфазного бесщеточного электродвигателя, протекает в двух фазах трехфазного бесщеточного электродвигателя, электрический ток не протекает на оставшуюся фазу, которая не используется для управления коротким замыканием.
Во время этого периода, изменения электрического тока двух фаз пересекаются в точке, где электрический ток является нулевым (точка перехода через ноль). То есть, во время торможения посредством управления коротким замыканием двух фаз, возникает время, в которое электрический ток, протекающий во всех фазах трехфазного бесщеточного электродвигателя, является нулевым.
Следовательно, устройство управления торможением может быть сконфигурировано с возможностью детектирования времени, в которое электрический ток, который протекает в каждой фазе трехфазного бесщеточного электродвигателя, является нулевым, в качестве времени завершения управления коротким замыканием двух фаз, исходя из состояния вращения трехфазного бесщеточного электродвигателя, и завершения управления коротким замыканием двух фаз при детектированном времени завершения.
То есть, при управлении коротким замыканием трех фаз, электрический ток определенно протекает в какой-либо из фаз трехфазного бесщеточного электродвигателя во время торможения. Следовательно, если три цепи проводимости, которые находились в проводящем состоянии до настоящего времени, переключаются в состояние прерывания для завершения управления коротким замыканием трех фаз, высокое напряжение генерируется на обоих концах обмотки, через которую электрический ток протекал в это время.
Высокое напряжение регенерируется в виде регенеративной энергии на стороне источника питания постоянного тока, через диоды (добавочные диоды полевых транзисторов и т.д.), подключенные параллельно с переключающими элементами, соединенными с соответствующими контактами. Если регенеративная энергия (другими словами, генерируемое напряжение) является большой, переключающие элементы могут повреждаться.
В частности, в трехфазном бесщеточном электродвигателе, когда импеданс цепи проводимости и сопротивление в состоянии "включено" переключающих элементов снижаются для повышения эффективности характеристик электродвигателя, когда прикладывается большая нагрузка, тормозной электрический ток, когда выполняется торможение коротким замыканием, является большим. Дополнительно, регенеративная энергия, подлежащая генерированию в конце торможения коротким замыканием, также является большой.
Следовательно, когда трехфазный бесщеточный электродвигатель тормозится, используя тормоз короткого замыкания, посредством традиционного управления коротким замыканием трех фаз, является необходимым использовать переключающие элементы, имеющие сопротивление к высокому напряжению для того, чтобы не повреждаться регенеративной энергией (высоким напряжением), генерируемой в конце торможения коротким замыканием.
В противоположность, при управлении коротким замыканием двух фаз, имеет место время, в которое электрические токи во всех фазах трехфазного бесщеточного электродвигателя являются нулевыми. Следовательно, если управление коротким замыканием двух фаз заканчивается в это время, является возможным устанавливать регенеративную энергию, генерируемую во время завершения, на ноль.
Таким образом, если устройство управления торможением выполнено, как описано выше, является возможным уменьшить сопротивление напряжению переключающих элементов, и, тем самым уменьшить затраты на устройство торможения.
Так как время, в которое электрический ток, протекающий в каждой фазе трехфазного бесщеточного электродвигателя, является нулевым, варьируется в зависимости от состояния вращения (положения вращения и частоты вращения) трехфазного бесщеточного электродвигателя, время завершения управления коротким замыканием двух фаз может устанавливаться исходя из состояния вращения трехфазного бесщеточного электродвигателя.
Состояние вращения трехфазного бесщеточного электродвигателя может детектироваться, используя датчик вращения (такой как элемент Холла или энкодер, и т.д.) для детектирования положения вращения, который обычно обеспечен в трехфазном бесщеточном электродвигателе.
Также, состояние вращения трехфазного бесщеточного электродвигателя может детектироваться посредством детектирования индуцированного напряжения, генерируемого в каждой фазе при торможении, или электрического тока, протекающего в каждой фазе.
Устройство торможения может включать в себя устройство детектирования положения вращения, которое сконфигурировано с возможностью детектирования положения вращения трехфазного бесщеточного электродвигателя. Устройство управления торможением может быть сконфигурировано с возможностью выполнения прерывистого управления коротким замыканием двух фаз, в котором управление коротким замыканием двух фаз прерывисто выполняется в соответствии с положением вращения трехфазного бесщеточного электродвигателя, детектированным посредством устройства детектирования положения вращения при управлении торможением, и, когда управление коротким замыканием двух фаз не выполняется, все из цепей проводимости стороны положительного электрода и стороны отрицательного электрода приводятся в непроводящее состояние.
В этом случае, посредством прерывистого выполнения управления коротким замыканием двух фаз, является возможным препятствовать протеканию электрического тока на фазу, которая не соответствует двум цепям проводимости для проведения и сдерживания электрического тока, который протекает через две цепи проводимости, которые проводили.
То есть, посредством регулирования периода для остановки управления коротким замыканием двух фаз посредством прерывистого управления коротким замыканием двух фаз, является возможным произвольно устанавливать силу торможения, генерируемую при торможении трехфазного бесщеточного электродвигателя.
Устройство управления торможением может быть сконфигурировано с возможностью выполнения управления переключением короткого замыкания двух фаз, в котором две цепи проводимости, которые приводятся в проводящее состояние при управлении коротким замыканием двух фаз, переключаются в соответствии с положением вращения трехфазного бесщеточного электродвигателя, детектированным посредством устройства детектирования положения вращения.
В этом случае, посредством переключения комбинации двух цепей проводимости, управляемых таким образом, чтобы они находились в проводящем состоянии при управлении коротким замыканием двух фаз, является возможным устанавливать силу торможения, генерируемую в трехфазном бесщеточном электродвигателе таким образом, чтобы она была больше, чем сила торможения при прерывистом управлении коротким замыканием двух фаз, и таким образом, чтобы она была меньше, чем сила торможения в случае, в котором управление коротким замыканием двух фаз выполняется непрерывно.
Устройство управления торможением может быть сконфигурировано с возможностью выполнения управления переключением короткого замыкания двух фаз посредством выбора двух цепей проводимости, подлежащих приведению в проводящее состояние при управлении коротким замыканием двух фаз, из трех цепей проводимости, составляющих одну из цепи проводимости стороны положительного электрода и цепи проводимости стороны отрицательного электрода, и переключения комбинации цепей проводимости, подлежащих выбору, в соответствии с положением вращения трехфазного бесщеточного электродвигателя.
Устройство управления торможением может быть сконфигурировано с возможностью выполнения управления переключением короткого замыкания двух фаз посредством поочередного выбора двух цепей проводимости, подлежащих приведению в проводящее состояние при управлении коротким замыканием двух фаз, из трех цепей проводимости, составляющих цепь проводимости стороны положительного электрода, и трех цепей проводимости, составляющих цепь проводимости стороны отрицательного электрода, в соответствии с положением вращения трехфазного бесщеточного электродвигателя.
Устройство управления торможением может быть сконфигурировано с возможностью варьирования силы торможения, подлежащей генерированию в трехфазном бесщеточном электродвигателе, посредством изменения периода выполнения управления коротким замыканием двух фаз в соответствии с состоянием вращения трехфазного бесщеточного электродвигателя.
В этом случае, является возможным оптимально управлять силой торможения, генерируемой в трехфазном бесщеточном электродвигателе.
То есть, например, когда частота вращения трехфазного бесщеточного электродвигателя является высокой, является возможным сдерживать силу торможения, чтобы уменьшить удар при замедлении, создаваемый при торможении. Когда частота вращения трехфазного бесщеточного электродвигателя является низкой, является возможным увеличить силу торможения для немедленной остановки трехфазного бесщеточного электродвигателя без создания удара при замедлении.
Устройство управления торможением может быть выполнено таким образом, чтобы быть способным выполнять управление коротким замыканием трех фаз, в котором состояние "включено"/"выключено" каждого из шести переключающих элементов в переключающей схеме устанавливается таким образом, что три цепи проводимости, составляющие одну из цепи проводимости стороны положительного электрода и цепи проводимости стороны отрицательного электрода, приводятся в проводящее состояние, и другие из трех цепей проводимости приводятся в непроводящее состояние при управлении торможением. Устройство управления торможением может быть дополнительно сконфигурировано с возможностью управления тормозным усилием, генерируемым в трехфазном бесщеточном электродвигателе, посредством выполнения управления коротким замыканием трех фаз и управления коротким замыканием двух фаз в комбинации при торможении трехфазного бесщеточного электродвигателя.
Также, в этом случае, управление коротким замыканием двух фаз может выполняться посредством переключения способов управления, таких как прерывистое управление коротким замыканием двух фаз, управление переключением короткого замыкания двух фаз, и так далее.
Таким образом, является возможным тормозить трехфазный бесщеточный электродвигатель посредством оптимальной силы торможения в соответствии с состоянием вращения в это время.
Приводимый в действие электродвигателем инструмент в другом аспекте настоящего изобретения включает в себя вышеописанный бесщеточный электродвигатель и устройство торможения.
Приводимый в действие электродвигателем инструмент, выполненный подобным образом, может демонстрировать такой же эффект, как и вышеописанное устройство торможения, так как приводимый в действие электродвигателем инструмент обеспечен с вышеописанным тормозным устройством.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение теперь будет описываться ниже в качестве примера со ссылкой на прилагаемые чертежи, на которых:
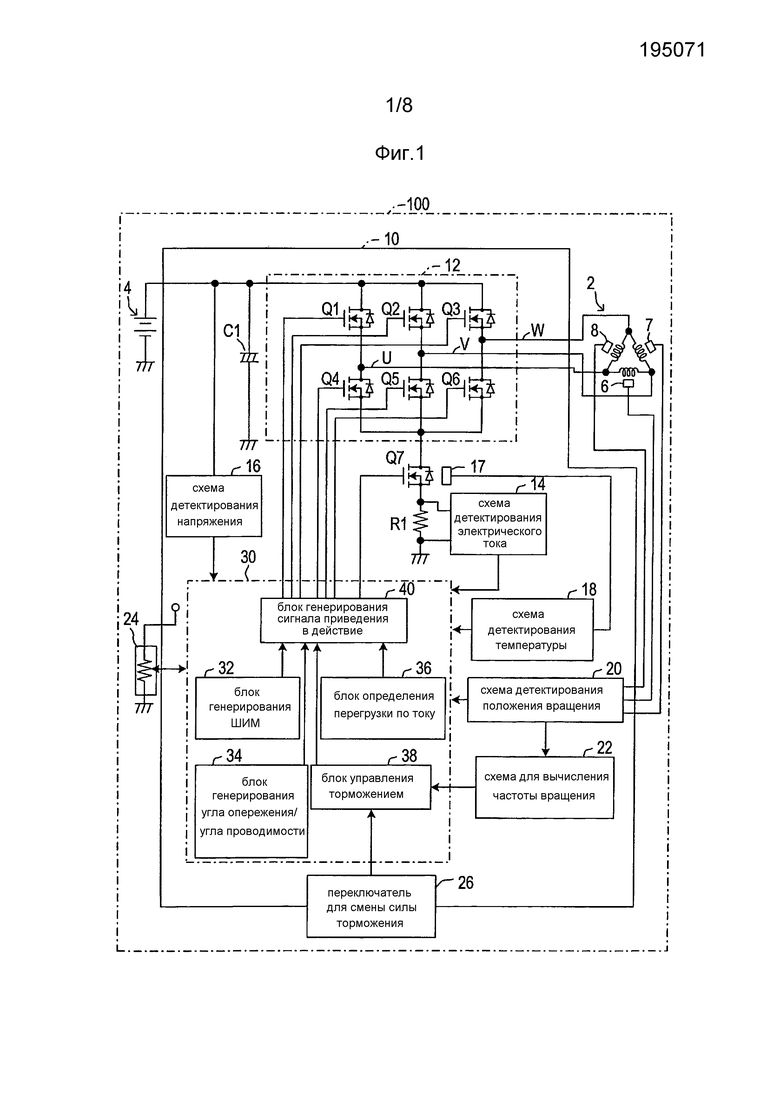
ФИГ. 1 представляет собой структурную схему, показывающую конфигурацию всего устройства привода электродвигателя одного варианта осуществления;
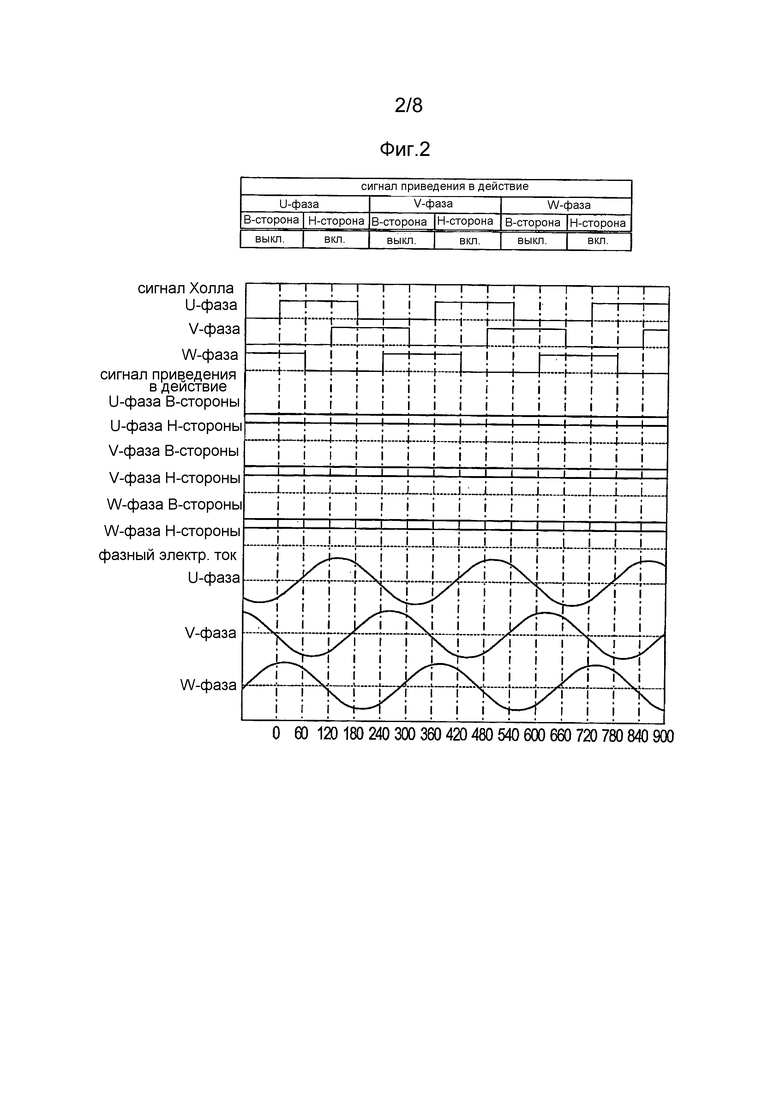
ФИГ. 2 представляет собой пояснительный график, показывающий изменения сигналов Холла, сигналов приведения в действие и фазных электрических токов, в тормозе короткого замыкания всех фаз;
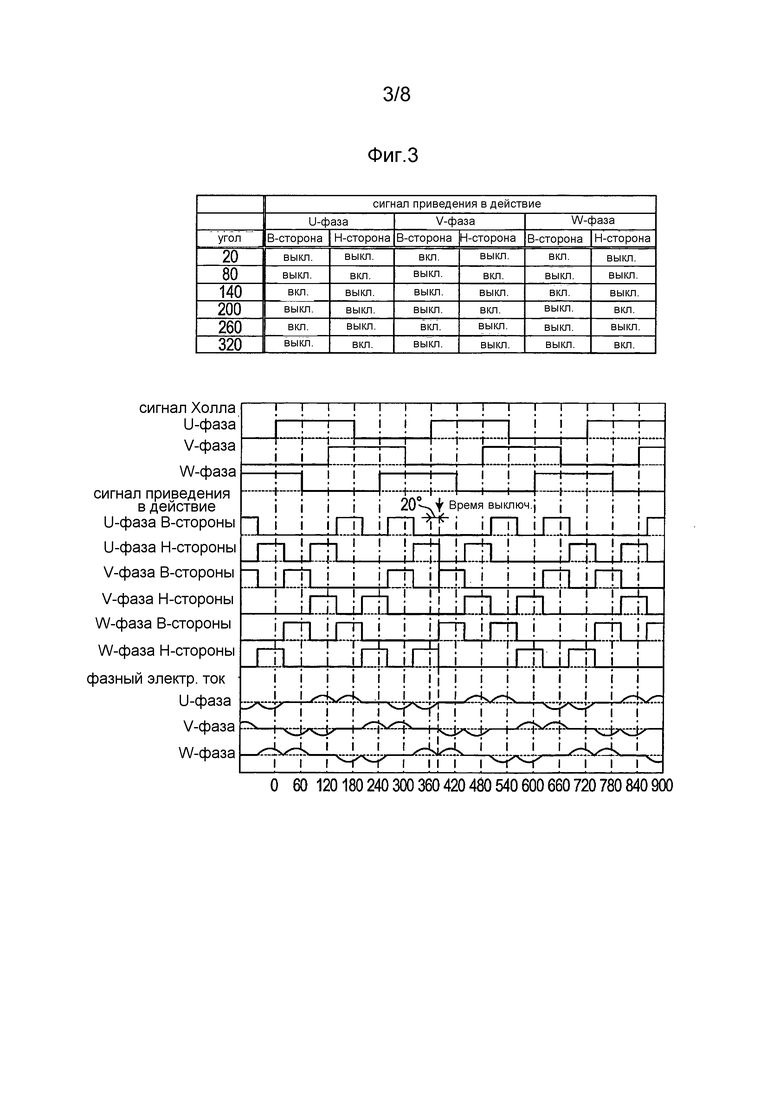
ФИГ. 3 представляет собой пояснительный график, показывающий изменения сигналов Холла, сигналов приведения в действие и фазных электрических токов, в тормозе короткого замыкания двух фаз посредством управления переключением фаз короткого замыкания В/Н;
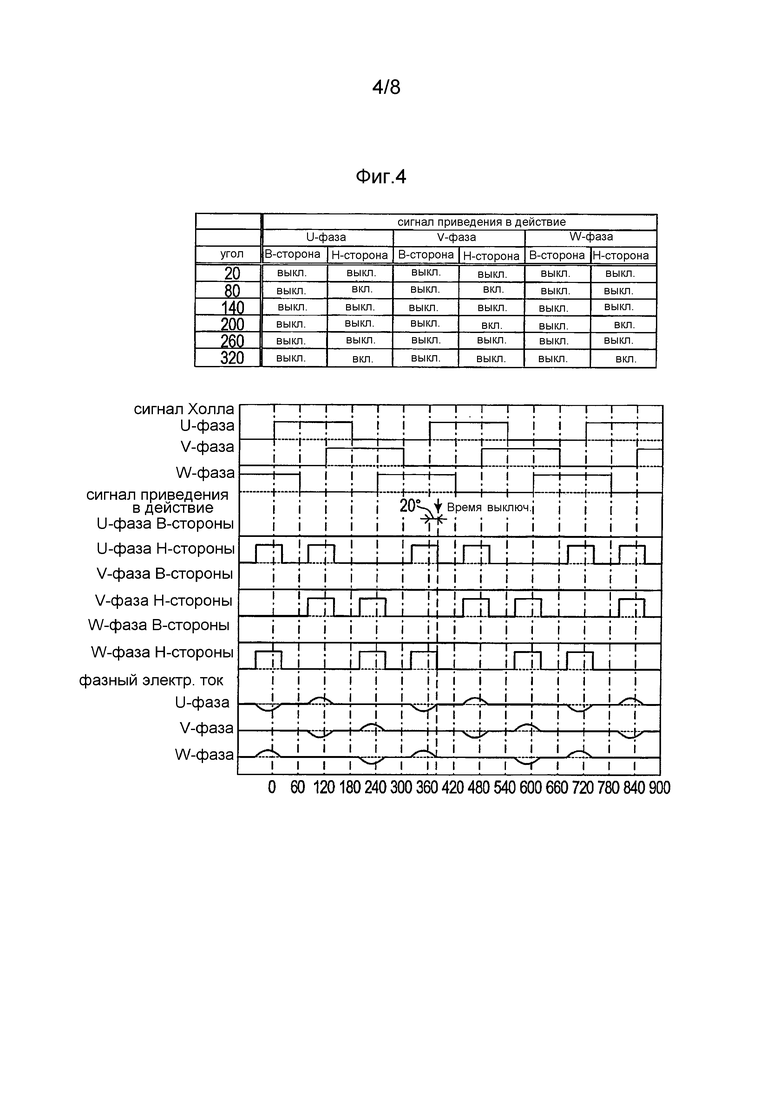
ФИГ. 4 представляет собой пояснительный график, показывающий изменения сигналов Холла, сигналов приведения в действие и фазных электрических токов, в тормозе короткого замыкания двух фаз посредством управления переключением фаз короткого замыкания Н-стороны;
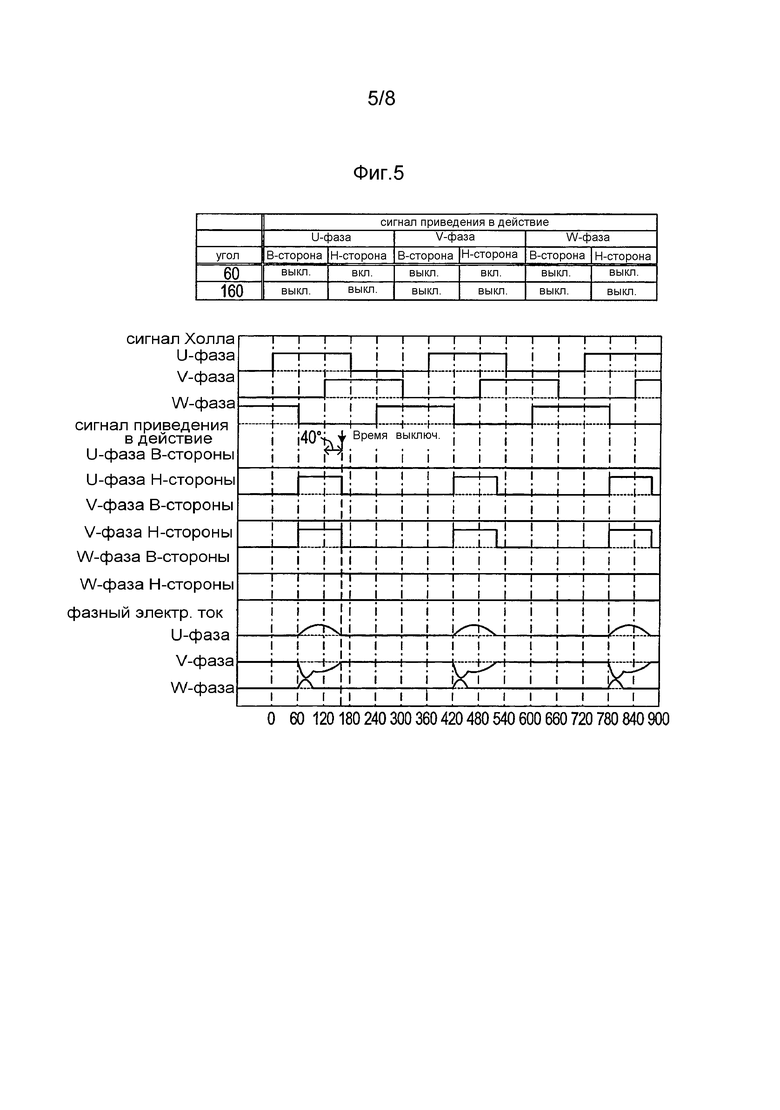
ФИГ. 5 представляет собой пояснительный график, показывающий изменения сигналов Холла, сигналов приведения в действие и фазных электрических токов, в тормозе короткого замыкания двух фаз посредством управления коротким замыканием UV-фаз Н-стороны;
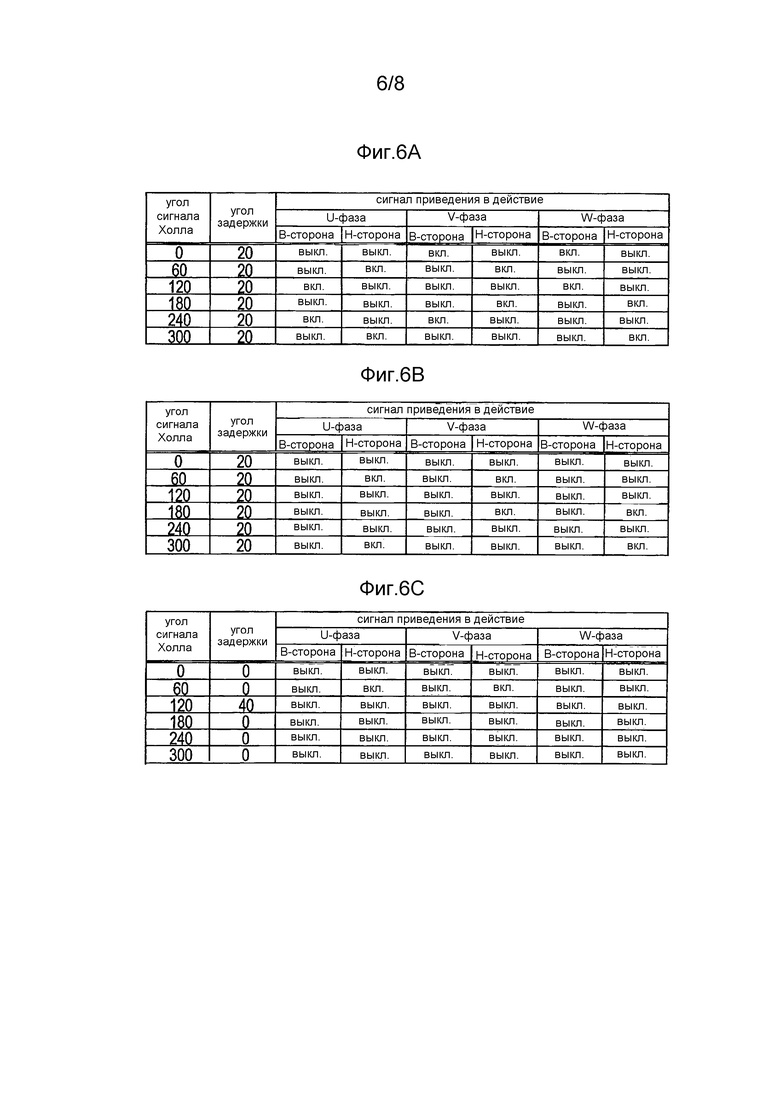
ФИГ. 6А-6С представляют собой пояснительные схемы, показывающие таблицы управления, использующиеся в тормозах короткого замыкания двух фаз, показанных на ФИГ. 3-5;
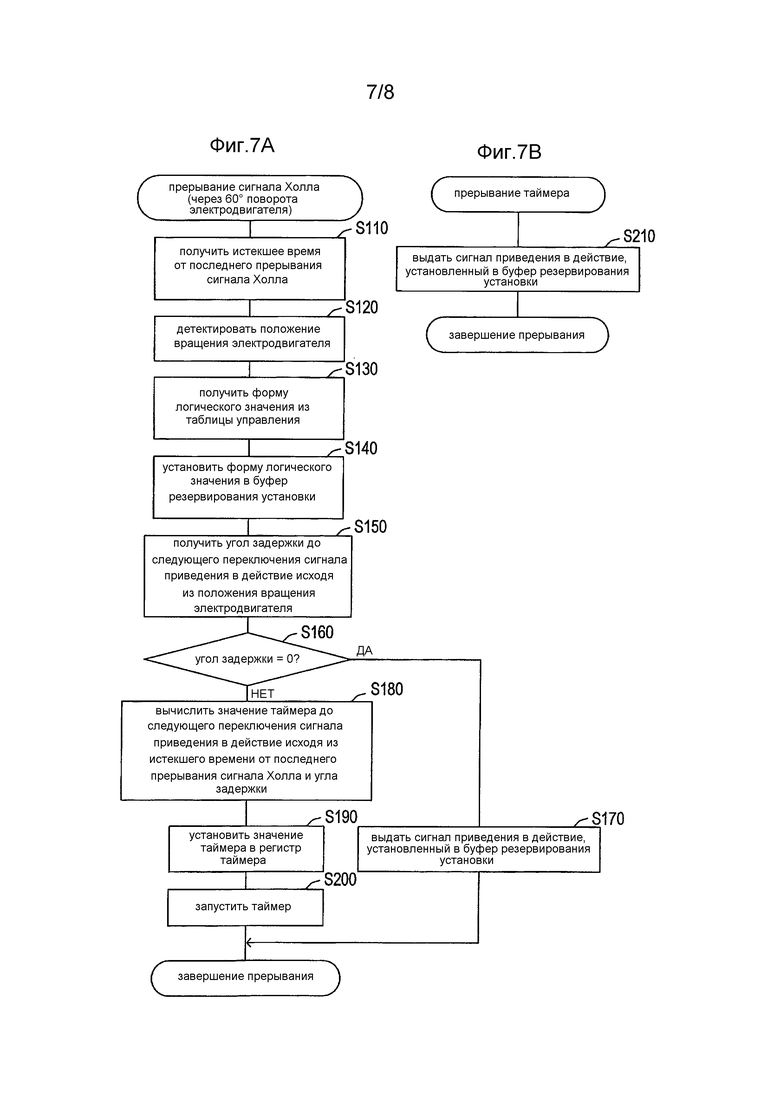
ФИГ. 7А и 7В представляют собой блок-схемы, показывающие процессы, выполняемые для осуществления функции в качестве блока управления торможением в схеме управления; и
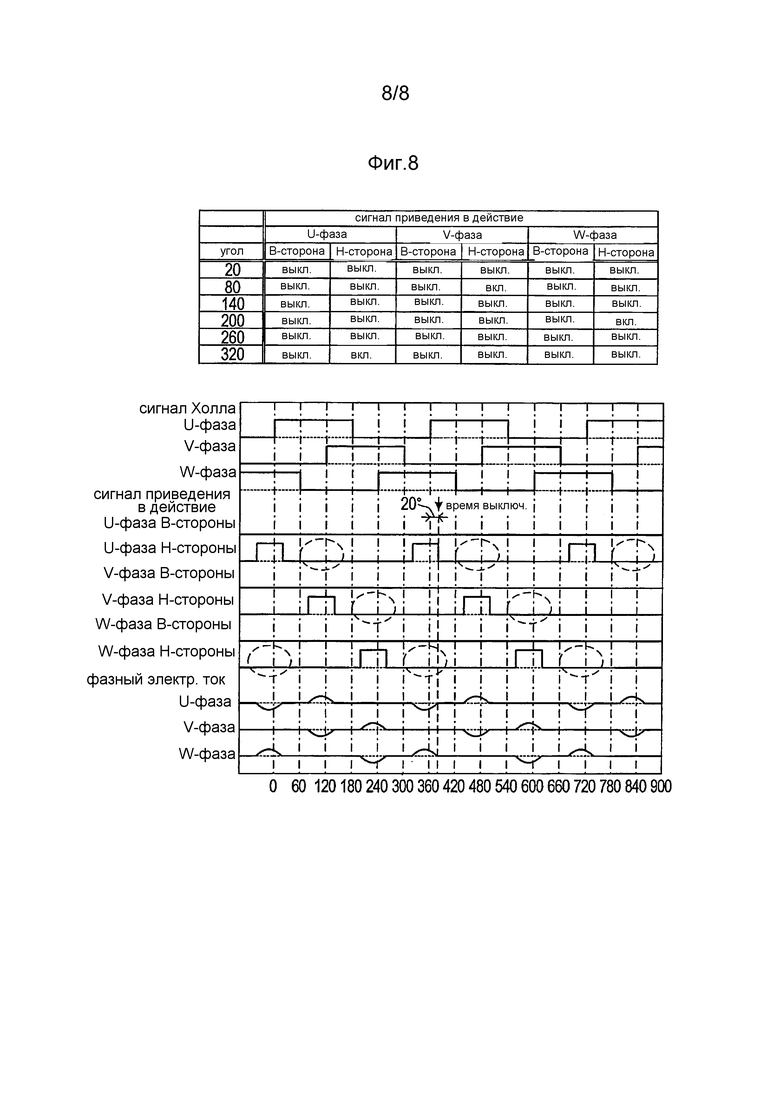
ФИГ. 8 представляет собой пояснительный график, показывающий изменение тормоза короткого замыкания двух фаз посредством управления переключением фаз короткого замыкания Н-стороны.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В настоящем варианте осуществления, настоящее изобретение применяется для устройства 10 привода электродвигателя, использующегося для приведения в действие трехфазного бесщеточного электродвигателя (в дальнейшем, просто называемого электродвигателем) 2, который служит в качестве источника мощности в электрическом оборудовании 100, включающем в себя приводимый в действие электродвигателем инструмент, такой как перезаряжаемая косилка, перезаряжаемая дисковая пила и тому подобное.
Как показано на ФИГ. 1, приводное устройство 10 электродвигателя настоящего варианта осуществления обеспечено линией электропитания и линией заземления. Линия электропитания соединена со стороной положительного электрода аккумуляторной батареи 4, которая представляет собой источник питания постоянного тока. Линия заземления соединена со стороной отрицательного электрода аккумуляторной батареи 4.
Между линией электропитания на стороне положительного электрода и линией заземления на стороне отрицательного электрода, обеспечена переключающая схема 12 для управления электрическим током, протекающим на каждую фазу U, V и W электродвигателя 2.
Переключающая схема 12 включает в себя три переключающих элемента Q1, Q2 и Q3 (переключатель Q1 верхней стороны U-фазы, переключатель Q2 верхней стороны V-фазы и переключатель Q3 верхней стороны W-фазы), и три переключающих элемента Q4, Q5 и Q6 (переключатель Q4 нижней стороны U-фазы, переключатель Q5 нижней стороны V-фазы и переключатель Q6 нижней стороны W-фазы). Переключающие элементы Q1, Q2 и Q3 обеспечены в цепи проводимости на стороне положительного электрода между контактами U-, V-, и W-фаз электродвигателя 2 и линией электропитания. Переключающие элементы Q4, Q5 и Q6 обеспечены в цепи проводимости на стороне отрицательного электрода между контактами U-, V-, и W-фаз электродвигателя 2 и линией заземления.
Дополнительно, в цепи проводимости на стороне отрицательного электрода между переключающей схемой 12 и линией заземления (то есть, между переключающими элементами Q4-Q6 на стороне отрицательного электрода и линией заземления), обеспечены переключающий элемент (переключатель для прерывания электрического тока) Q7 для прерывания электрических токов и резистор R1.
К обоим концам резистора R1, присоединена схема 14 детектирования электрического тока, которая детектирует электрический ток, протекающий в электродвигатель 2, от напряжения между обоими концами резистора R1. Датчик 17 температуры, имеющий характеристики, которые изменяются в зависимости от температуры переключателя Q7 для прерывания электрического тока, обеспечен вблизи переключателя Q7 для прерывания электрического тока.
Кроме того, к датчику 17 температуры присоединена схема 18 детектирования температуры, которая детектирует температуру переключателя Q7 для прерывания электрического тока посредством датчика 17 температуры. Сигналы детектирования от схемы 18 детектирования температуры подаются на схему 30 управления вместе с сигналами детектирования от схемы 14 детектирования электрического тока.
В настоящем варианте осуществления, каждый из вышеописанных переключающих элементов Q1-Q7 представляет собой N-канальный МОП-транзистор. Однако переключающие элементы настоящего изобретения не ограничены N-канальным МОП-транзистором.
Кроме того, между линией электропитания, ведущей к переключающей схеме 12 от стороны положительного электрода аккумуляторной батареи 4 (цепь проводимости на стороне положительного электрода), и линией заземления, обеспечены конденсатор С1 для сглаживания и схема 16 детектирования напряжения, которая детектирует напряжение (то есть, напряжение аккумуляторной батареи) между линиями.
Дополнительно, приводное устройство 10 электродвигателя также включает в себя схему 20 детектирования положения вращения и схему 22 для вычисления частоты вращения. Схема 20 детектирования положения вращения детектирует положение вращения электродвигателя 2. Схема 22 для вычисления частоты вращения вычисляет частоту вращения электродвигателя 2, исходя из положения вращения, определенного посредством схемы 20 детектирования положения вращения.
Сигналы детектирования от схемы 16 детектирования напряжения, схемы 20 детектирования положения вращения и схемы 22 для вычисления частоты вращения также подаются на схему 30 управления.
Схема 20 детектирования положения вращения детектирует положение вращения (другими словами, угол вращения) электродвигателя 2, исходя из сигналов детектирования (сигналов Холла) от трех датчиков 6, 7 и 8 Холла для детектирования положения вращения, обеспеченных в электродвигателе 2.
То есть, датчики 6, 7 и 8 Холла расположены со 120-градусным интервалом вокруг ротора электродвигателя 2, и выдают сигналы Холла U-, V-, и W-фазы, которые повышаются или понижаются, каждый раз, когда ротор поворачивается на 180 градусов.
Схема 20 детектирования положения вращения выполняет формирование кривых сигналов Холла U-, V-, и W-фазы от датчиков 6, 7 и 8 Холла, тем самым генерируя импульсноообразные сигналы Холла (см. ФИГ. 2-4), положительные и отрицательные из которых меняются через 180-градусное вращение ротора, для детектирования положения вращения электродвигателя 2 (ротора) при 60-градусном интервале от фронта каждого сигнала Холла. Дополнительно, схема 22 для вычисления частоты вращения вычисляет частоту вращения электродвигателя 2 из интервала фронта каждого сигнала Холла.
Далее, схема 30 управления представляет собой микрокомпьютер, который включает в себя непоказанные ЦП, ПЗУ и ОЗУ в настоящем варианте осуществления. В соответствии с состоянием блока 24 для манипулирования, манипулируемого пользователем, выполняются управление приведением в действие и управление торможением электродвигателя 2.
Другими словами, схема 30 управления определяет, что подается приводная команда, когда блок 24 для манипулирования манипулируется пользователем, и приводит в действие электродвигатель 2 в соответствии с величиной манипулирования блока 24 для манипулирования. Когда манипулирование блоком 24 для манипулирования пользователем завершено, схема 30 управления определяет, что подается команда замедления или команда останова, и тормозит электродвигатель 2.
Для выполнения управления приведением в действие и управления торможением электродвигателя 2, как приведено выше, схема 30 управления выполняет различные программы управления, хранящиеся в ПЗУ, и осуществляет функции в качестве блока 32 генерирования ШИМ, блока 34 генерирования угла опережения/угла проводимости, блока 36 определения перегрузки по току, блока 38 управления торможением и блока 40 генерирования сигнала приведения в действие, все из которых показаны на ФИГ. 1.
Здесь, исходя из электрического тока проводимости, протекающего на электродвигатель 2, детектированного посредством схемы 14 детектирования электрического тока, и положения вращения электродвигателя 2, детектированного посредством схемы 20 детектирования положения вращения, блок 34 генерирования угла опережения/угла проводимости генерирует команду проводимости, представляющую собой угол опережения/угол проводимости, во время приведения в действие электродвигателя 2, ссылаясь на таблицу углов опережения/углов проводимости, предварительно сохраненную в ПЗУ, и выдает команду проводимости на блок 40 генерирования сигнала приведения в действие.
Дополнительно, блок 32 генерирования ШИМ вычисляет коэффициент заполнения приведения в действие для ШИМ-управления электродвигателем 2, генерирует ШИМ-команду, которая представляет собой коэффициент заполнения приведения в действие, и выдает ШИМ-команду на блок 40 генерирования сигнала приведения в действие.
Затем, блок 40 генерирования сигнала приведения в действие включает переключатель Q7 для прерывания электрического тока, когда блок 24 для манипулирования манипулируется и выполняется управление приведением в действие электродвигателя 2. Дополнительно, в соответствии с командой проводимости от блока 34 генерирования угла опережения/угла проводимости, блок 40 генерирования сигнала приведения в действие генерирует сигналы приведения в действие для включения одного из переключающих элементов (переключателей верхней стороны) Q1-Q3 на стороне положительного электрода и одного из переключающих элементов (переключателей нижней стороны) Q4-Q6 на стороне отрицательного электрода, которые составляют переключающую схему 12, и выдает сигналы приведения в действие на переключающую схему 12.
Дополнительно, блок 40 генерирования сигнала приведения в действие выдает сигналы приведения в действие для одной из группы переключателей верхней стороны и группы переключателей нижней стороны в виде ШИМ-сигналов, имеющих коэффициент заполнения приведения в действие, соответствующий ШИМ-команде от блока 32 генерирования ШИМ, тем самым, приводя в действие в соответствии с заполнением переключатели.
В результате, электрический ток, соответствующий коэффициенту заполнения приведения в действие протекает на каждую из U-, V-, и W-фаз электродвигателя 2. Электродвигатель 2 вращается с частотой вращения, соответствующей величине манипулирования блока 24 для манипулирования.
Кроме того, блок 36 определения перегрузки по току, когда приводной электрический ток электродвигателя 2, детектированный посредством схемы 14 детектирования электрического тока, превышает пороговое значение для определения перегрузки по току, прекращает выдачу сигналов приведения в действие от блока 40 генерирования сигнала приведения в действие (другими словами, приведение в действие электродвигателя 2).
Дополнительно, схема 30 управления, исходя из сигналов детектирования от схемы 16 детектирования напряжения и схемы 18 детектирования температуры, осуществляет мониторинг напряжения аккумуляторной батареи и температуры переключателя Q7 для прерывания электрического тока и останавливает управление приведением в действие электродвигателя 2, когда напряжение аккумуляторной батареи является низким или температура переключателя Q7 для прерывания электрического тока повышается.
Далее, блок 38 управления торможением представляет собой блок управления, который осуществляет функцию в качестве примера устройства торможения в соответствии с настоящим изобретением. Когда манипулирование блоком 24 для манипулирования пользователем завершается после выполнения управления приведением в действие электродвигателя 2, блок 38 управления торможением определяет, что подается команда замедления или команда останова, и генерирует силу торможения в электродвигателе 2.
Конкретно, блок 38 управления торможением выключает переключатель Q7 для прерывания электрического тока через посредство узла 40 генерирования сигнала приведения в действие и выборочно включает часть переключающих элементов Q1-Q6 в переключающей схеме 12 для того, чтобы соединяться между контактами электродвигателя 2. Таким образом, сила торможения генерируется в электродвигателе 2.
Как приведено выше, в качестве тормоза короткого замыкания, который соединяется между контактами U-, V-, и W-фаз электродвигателя 2 для того, чтобы генерировать силу торможения, известен тормоз короткого замыкания всех фаз, который управляет переключающими элементами Q1-Q3 на стороне положительного электрода (В-стороне) U-, V-, и W-фаз электродвигателя 2 в состояние "выключено", и переключающими элементами Q4-Q6 на стороне отрицательного электрода (Н-стороне) в состояние "включено", как показано на ФИГ. 2.
Однако, в тормозе короткого замыкания всех фаз, электрический ток (тормозной электрический ток) протекает на каждую из U-, V-, и W-фаз электродвигателя 2 в соответствии с вращением электродвигателя 2. Затем, генерируется сила торможения, соответствующая электрическому току торможения. Таким образом, в зависимости от состояния вращения (например, частоты вращения) электродвигателя 2, сила торможения становится большой, что могут возникать дефекты в электрическом оборудовании 100.
Следовательно, в настоящем варианте осуществления, блок 38 управления торможением выполняет одно из торможений короткого замыкания двух фаз, показанных на ФИГ. 3-5, дополнительно к тормозу короткого замыкания всех фаз, показанному на ФИГ. 2, таким образом, чтобы быть способным тормозить электродвигатель 2 с требуемой силой торможения.
То есть, устройство 10 привода электродвигателя настоящего варианта осуществления обеспечено переключателем 26 для смены силы торможения. Переключатель 26 для смены силы торможения переключает силу торможения при торможении электродвигателя 2 в четыре этапа с максимальной силы торможения посредством тормоза короткого замыкания всех фаз на силы торможения посредством тормозов короткого замыкания двух фаз, показанных на ФИГ. 3-5, в ответ на операцию переключения пользователем.
Затем, блок 38 управления торможением генерирует силу торможения в электродвигателе 2 посредством тормоза короткого замыкания, заданного посредством переключателя 26 для смены силы торможения, тем самым тормозя электродвигатель 2.
Здесь, торможение короткого замыкания двух фаз, показанное на ФИГ. 3, достигается посредством управления переключением фаз короткого замыкания В/Н. При управлении переключением фаз короткого замыкания В/Н, сила торможения генерируется в электродвигателе 2 в соответствии с этапами ниже.
(i) Переключающие элементы в переключающей схеме 12 включаются таким образом, чтобы поочередно переключать цепь проводимости, подлежащую обеспечивать проводимость, между цепью проводимости на стороне положительного электрода (В-стороне) и цепью проводимости на стороне отрицательного электрода (Н-стороне), через 60-градусное вращение электродвигателя 2.
(ii) Две фазы выбираются из трех фаз U-, V-, и W-фаз в качестве цепей проводимости, подлежащих обеспечивать проводимость одновременно.
(iii) Комбинация двух фаз, подлежащих выбору, переключается с UV на VW на WU, последовательно.
(iv) Дополнительно, время переключения (время выключения) устанавливается на время, отстающее на 20-градусов поворота электродвигателя 2 от фронтов (0 градусов, 60 градусов, 120 градусов,...) сигналов Холла.
Дополнительно, при управлении переключением фаз короткого замыкания В/Н, группа из двух фаз, которые коротко замыкаются посредством цепи проводимости, переключается через 60-градусов поворота электродвигателя 2, как показано на ФИГ. 3. Короткое замыкание возникает между контактами любых двух фаз в области полного оборота электродвигателя 2. Затем, электрический ток торможения протекает на две фазы.
Причина, почему время переключения управления коротким замыканием двух фаз через 60-градусов поворота электродвигателя 2 установлено на время, отстающее на 20-градусов поворота электродвигателя 2 от фронтов (0 градусов, 60 градусов, 120 градусов) сигналов Холла, заключается в том, что электрический ток, протекающий в каждой фазе электродвигателя 2, может быть в достаточной мере уменьшен в это время.
Другими словами, время, в которое электрический ток, протекающий в каждой фазе электродвигателя 2, является нулевым, варьируется в зависимости от условий, таких как частота (индуцированное напряжение), величина тормозного электрического тока, индуктивность обмотки электродвигателя 2 и т.д.
Следовательно, для установки вышеописанного времени переключения на время, в которое электрический ток, протекающий в каждой фазе электродвигателя 2, является нулевым, время переключения может быть установлено в соответствии с этими условиями.
Однако, так как вышеприведенные условия варьируются, является трудным установить вышеописанное время переключения таким образом, что электрический ток, протекающий в каждой фазе электродвигателя 2, является нулевым без отказа.
Следовательно, в настоящем варианте осуществления, время, в которое электрический ток, протекающий в каждой фазе электродвигателя 2, становится нулевым при определенных условиях, определено, и это определенное время устанавливается в качестве времени переключения. Таким образом, когда электрический ток, который протекает в каждой фазе электродвигателя 2, является нулевым или достаточно небольшим, выполняется переключение управления коротким замыканием двух фаз.
Вследствие вышеприведенной установки времени переключения, возникновение высокого напряжения может сдерживаться в цепи проводимости, которая переключается из проводящего состояния в состояние прерывания. Переключающий элемент, соединенный с цепью проводимости, может защищаться от высокого напряжения.
Далее, торможение короткого замыкания двух фаз, показанное на ФИГ. 4, достигается посредством управления переключением фаз короткого замыкания Н-стороны. В управлении переключением фаз короткого замыкания Н-стороны, сила торможения генерируется в электродвигателе 2 в соответствии с этапами ниже.
(i) Переключающие элементы (переключатели верхней стороны) Q1-Q3, обеспеченные в цепи проводимости на стороне положительного электрода (В-стороне), из переключающих элементов Q1-Q6 в переключающей схеме 12 выключаются для прерывания цепи проводимости на стороне положительного электрода (В-стороне).
(ii) Два из переключающих элементов (переключателей нижней стороны) Q4-Q6, обеспеченных в цепи проводимости на стороне отрицательного электрода (Н-стороне), включаются только в течение 60 градусов через 120-градусов поворота электродвигателя 2, таким образом две из цепей проводимости на стороне отрицательного электрода (Н-стороне) находятся в проводящем состоянии.
(iii) Комбинация двух переключающих элементов, подлежащих включению, переключается последовательно с UV на VW на WU.
(iv) Время выключения переключающих элементов, подлежащих переключению из состояния "включено" в состояние "выключено" посредством вышеприведенного переключения, устанавливается на время, отстающее на 20-градусов поворота электродвигателя 2 от фронтов (0 градусов, 120 градусов, 240 градусов,...) сигналов Холла.
При управлении переключением фаз короткого замыкания Н-стороны, как показано на ФИГ. 4, две фазы, которые коротко замыкаются посредством цепи проводимости на стороне отрицательного электрода (Н-стороне), переключаются через 120-градусов поворота электродвигателя 2. Так как период короткого замыкания двух фаз представляет собой период, во время которого электродвигатель 2 поворачивается на 60 градусов, электрический ток торможения протекает в двух фазах в пределах 1/2 диапазона от диапазона полного оборота электродвигателя 2.
Следовательно, в тормозе короткого замыкания двух фаз посредством управления переключением фаз короткого замыкания Н-стороны, сила торможения, генерируемая в электродвигателе 2, может сдерживаться по сравнению с тормозом короткого замыкания двух фаз посредством управления переключением фаз короткого замыкания В/Н, показанного на ФИГ. 3.
Кроме того, причина, почему время завершения управления коротким замыканием двух фаз через 120-градусов поворота электродвигателя 2 установлено на время, отстающее на 20-градусов поворота электродвигателя 2 от фронтов (0 градусов, 120 градусов, 240 градусов) сигналов Холла, заключается в том, что электрический ток, протекающий на каждую фазу электродвигателя 2, может быть в достаточной мере уменьшен в это время.
То есть, в настоящем варианте осуществления, касательно также времени переключения тормоза короткого замыкания двух фаз в управлении переключением фаз короткого замыкания Н-стороны, как в случае вышеописанного управления переключением фаз короткого замыкания В/Н, время, в которое электрический ток, который протекает на каждую фазу электродвигателя 2, является нулевым, при определенных условиях, определено. Определенное время устанавливается в качестве времени переключения.
Следовательно, даже при управлении переключением фаз короткого замыкания Н-стороны, как и при управлении переключением фаз короткого замыкания В/Н, показанном на ФИГ. 3, посредством установки времени завершения управления коротким замыканием двух фаз, возникновение высокого напряжения в цепи проводимости, которая переключается из проводящего состояния в состояние прерывания, может сдерживаться. Переключающие элементы, соединенные с путем проводимости, могут защищаться от высокого напряжения.
Далее, торможение короткого замыкания двух фаз, показанное на ФИГ. 5, достигается посредством управления коротким замыканием UV-фаз Н-стороны. В управлении коротким замыканием UV-фаз Н-стороны, сила торможения генерируется в электродвигателе 2 в соответствии с этапами ниже.
(i) Из переключающих элементов Q1-Q6 в переключающей схеме 12, переключающие элементы (переключатели верхней стороны) Q1-Q3, обеспеченные в цепи проводимости на стороне положительного электрода (В-стороне), и переключатель Q6 нижней стороны W-фазы из переключающих элементов (переключателей нижней стороны) Q4-Q6, обеспеченных в цепи проводимости на стороне отрицательного электрода (Н-стороне), выключаются для прерывания цепи проводимости, обеспеченного с переключающими элементами Q1-Q3 и Q6.
(ii) Остальные два (переключатель Q4 нижней стороны U-фазы и переключатель Q5 нижней стороны V-фазы) из переключающих элементов (переключателей нижней стороны) Q4-Q6, обеспеченных в цепи проводимости на стороне отрицательного электрода (Н-стороне), включаются только во время 100-градусов поворота за один оборот электродвигателя 2, таким образом, цепь проводимости, обеспеченная переключающими элементами Q4 и Q5, находится в проводящем состоянии в течение заданного периода времени.
(iii) Время выключения для переключения переключающих элементов Q4 и Q5 из состояния "включено" в состояние "выключено" дополнительно устанавливается на время, отстающее на 40 градусов поворота электродвигателя 2 от 120-градусного фронта сигнала Холла.
Затем, при управлении коротким замыканием UV-фаз Н-стороны, как показано на ФИГ. 5, только до тех пор, пока электродвигатель 2 не повернется на 100 градусов от спадающего фронта (положение вращения электродвигателя 2: 60 градусов) сигнала Холла W-фазы за один оборот электродвигателя 2, переключатель Q4 нижней стороны U-фазы и переключатель Q5 нижней стороны V-фазы включены. Таким образом, тормозной электрический ток протекает к цепи проводимости на стороне отрицательного электрода (Н-стороне), обеспеченной этими двумя переключающими элементами.
Кроме того, во время вышеприведенного, переключатель Q6 нижней стороны W-фазы удерживается в состоянии "выключено". Однако, между стоком и истоком полевого транзистора, составляющего переключатель Q6 нижней стороны W-фазы, имеется дополнительный диод, который находится в направлении вперед от истока к стоку. Следовательно, через диод, в первой половине периода проводимости электрического тока торможения, электрический ток торможения протекает к цепи проводимости на стороне отрицательного электрода W-фазы.
Таким образом, при этом управлении коротким замыканием UV-фаз Н-стороны, сила торможения, соответствующая электрическому току торможения, протекающему к цепи проводимости на стороне отрицательного электрода каждой из U-, V-, и W-фаз, генерируется в электродвигателе 2. Его сила торможения может устанавливаться на значение, отличное от значений в тормозах короткого замыкания двух фаз, показанных на ФИГ. 3 и 4, посредством величины электрического тока торможения, протекающего на W-фазу.
Другими словами, при управлении коротким замыканием UV-фаз Н-стороны, если время, в течение которого электрический ток торможения протекает в цепи проводимости на стороне отрицательного электрода W-фазы, уменьшается, сила торможения может уменьшаться. Если время, в течение которого электрический ток торможения протекает в цепи проводимости на стороне отрицательного электрода W-фазы, увеличивается, сила торможения может увеличиваться.
Следовательно, при управлении коротким замыканием UV-фаз Н-стороны, сила торможения, генерируемая в электродвигателе 2, может уменьшаться или увеличиваться, по сравнению с тормозными усилиями посредством тормозов короткого замыкания двух фаз, показанных на ФИГ. 3 и 4.
Причина установки времени выключения переключающих элементов Q4 и Q5 на время, отстающее на 40 градусов поворота электродвигателя 2 от 120-градусного фронта сигнала Холла, заключается в том, что электрический ток, протекающий на каждую фазу электродвигателя 2, может быть достаточно небольшим в это время.
Другими словами, в настоящем варианте осуществления, также для времени выключения переключающих элементов Q4 и Q5 в управлении коротким замыканием UV-фаз Н-стороны, точно так же как и время переключения в вышеприведенном управлении переключением фаз короткого замыкания В/Н и управлении переключением фаз короткого замыкания Н-стороны, время, в которое электрический ток, протекающий на каждую фазу электродвигателя 2, является нулевым, при определенных условиях, определено. Это время устанавливается в качестве времени выключения.
Следовательно, даже при управлении коротким замыканием UV-фаз Н-стороны, аналогично управлению переключением фаз короткого замыкания В/Н, показанному на ФИГ. 3, и управлению переключением фаз короткого замыкания Н-стороны, показанному на ФИГ. 4, посредством установки времени завершения управления коротким замыканием двух фаз, возникновение высокого напряжения в цепи проводимости, которая переключается из проводящего состояния в состояние прерывания, может сдерживаться. Переключающие элементы, соединенные с цепью проводимости, могут защищаться от высокого напряжения.
Далее, для осуществления вышеприведенных трех типов тормоза короткого замыкания двух фаз, таблицы управления, показанные на ФИГ. 6А, 6В и 6С, хранятся в памяти (ПЗУ или энергонезависимом ОЗУ) схемы 30 управления для каждого из вышеприведенных тормозов короткого замыкания двух фаз.
Затем, схема 30 управления (ЦП), при выполнении управления торможением посредством тормоза короткого замыкания двух фаз, выбирает таблицу управления в зависимости от типа тормоза короткого замыкания двух фаз. В соответствии с выбранной таблицей управления, схема 30 управления переключает состояние "включено"/"выключено" переключающих элементов Q1-Q6 в переключающей схеме 12. На ФИГ. 6А показана таблица управления для использования в управлении переключением фаз короткого замыкания В/Н. На ФИГ. 6В показана таблица управления для использования в управлении переключением фаз короткого замыкания Н-стороны. На ФИГ. 6С показана таблица управления для использования в управлении коротким замыканием UV-фаз Н-стороны.
Как показано на ФИГ. 6А-6С, вышеописанные таблицы управления тормозов короткого замыкания двух фаз образованы посредством описания состояния "включено"/"выключено" (в соответствии с логическим значением Высокий/Низкий сигналов приведения в действие) переключающих элементов Q1-Q6 относительно опорного положения вращения (0 градусов, 60 градусов, 120 градусов,...) электродвигателя 2, в соответствии с фронтом сигнала Холла, и угла задержки от опорного положения вращения, который представляет собой время переключения состояния "включено"/"выключено".
Затем, схема 30 управления, при синхронизации с временем фронта сигнала Холла, через 60-градусный поворот электродвигателя 2, выполняет процесс прерывания сигнала Холла, показанный на ФИГ. 7А, и дополнительно, процесс прерывания таймера, показанный на ФИГ. 7В, как требуется. Посредством выполнения вышеприведенных процессов, достигается функция в качестве блока 38 управления торможением.
Как показано на ФИГ. 7А, в процессе прерывания сигнала Холла, сначала на S110 (S представляет собой этап), получается истекшее время от последнего прерывания сигнала Холла.
Дополнительно, на следующем S120, исходя из уровня сигнала Холла каждой из U-, V-, и W-фаз, детектируется положение вращения электродвигателя 2 (угол: 0 градусов, 60 градусов, 120 градусов,...).
Затем, на S130, из таблицы управления, в соответствии с типом тормоза короткого замыкания двух фаз, который выбран в настоящее время, получается форма логического значения сигнала приведения в действие, в соответствии с положением вращения электродвигателя 2 (состояние "включено"/"выключено" переключающих элементов Q1-Q6), определенным на S120. На S140, полученная форма логического значения устанавливается в буфер резервирования установки. Буфер резервирования установки представляет собой область памяти, обеспеченную заранее в схеме 30 управления.
Далее, на S150, из той же таблицы управления, что и таблица на S130, получается угол задержки, соответствующий положению вращения электродвигателя 2, определенному на S120. На следующем S160, определяется, равен ли или нет угол задержки 0 градусам.
Если угол задержки равен 0 градусам, нет необходимости задерживать выдачу сигналов приведения в действие. Процесс переходит на S170. Сигналы приведения в действие, соответствующие форме логического значения, установленной в буфер резервирования установки на S140, выдаются на затворы соответствующих переключающих элементов Q1-Q6. Процесс прерывания сигнала Холла завершается.
С другой стороны, когда на S160 определено, что угол задержки не равен 0 градусам, процесс переходит на S180. Исходя из истекшего времени от последнего прерывания сигнала Холла, полученного на S110, и угла задержки, полученного на S150, время задержки до следующего времени переключения сигнала приведения в действие вычисляется в виде значения таймера.
То есть, на S180, так как угол вращения электродвигателя 2 до прерывания сигнала Холла этого времени от предыдущего прерывания сигнала Холла составляет 60 градусов, время задержки до следующего времени переключения сигнала приведения в действие вычисляется следующим образом "время задержки=истекшее время*(угол задержки/60 градусов)". Время задержки преобразуется в значения таймера (значение счетчика) для отсчета времени.
Затем, на S190, значение таймера устанавливается в регистр таймера, обеспеченный в схеме 30 управления, для начала отсчета времени посредством таймера. Процесс прерывания сигнала Холла завершается.
Затем, когда отсчет времени посредством таймера начинается на S200, прерывание таймера возникает после истечения времени задержки.
Следовательно, схема 30 управления выполняет процесс на S210, показанный на ФИГ. 7В, в ответ на прерывание таймера. Сигналы приведения в действие, соответствующие форме логического значения, установленной в буфер резервирования установки на S140, выдаются на затворы соответствующих переключающих элементов Q1-Q6.
В результате, даже если любое одно из управления переключением фаз короткого замыкания В/Н, управления переключением фаз короткого замыкания Н-стороны и управления коротким замыканием UV-фаз Н-стороны выбрано в качестве тормоза короткого замыкания двух фаз, состояние "включено"/"выключено" переключающих элементов Q1-Q6 переключается с формой управления, в соответствии с управлением. Сила торможения, в соответствии с управлением, генерируется в электродвигателе 2.
Как описано выше, в соответствии с устройством 10 привода электродвигателя настоящего варианта осуществления, в качестве управления тормозом, подлежащего выполнению при торможении электродвигателя 2, один из тормоза короткого замыкания всех фаз и трех типов тормозов короткого замыкания двух фаз (управления переключением фаз короткого замыкания В/Н, управления переключением фаз короткого замыкания Н-стороны и управления коротким замыканием UV-фаз Н-стороны) может устанавливаться.
Следовательно, в соответствии с устройством 10 привода электродвигателя настоящего варианта осуществления, когда сила торможения при торможении электродвигателя 2 является слишком большой с тормозом короткого замыкания всех фаз, который представляет собой традиционный тормоз короткого замыкания трех фаз, пользователь может выбирать один из трех типов тормозов короткого замыкания двух фаз для достижения требуемой силы торможения. Является возможным сдерживать дефекты в электрическом оборудовании 100 вследствие чрезмерной силы торможения.
Также, в настоящем варианте осуществления, даже с тормозом короткого замыкания двух фаз в любом одном из управления переключением фаз короткого замыкания В/Н, управления переключением фаз короткого замыкания Н-стороны и управления коротким замыканием UV-фаз Н-стороны, время завершения управления коротким замыканием двух фаз, при завершении управления коротким замыканием двух фаз для переключения фазы короткого замыкания, устанавливается таким образом, что электрический ток, протекающий в каждой фазе электродвигателя 2, является нулевым или имеет достаточно небольшое значение электрического тока.
Таким образом, затрудняется возникновение высокого напряжения в цепи проводимости, подлежащей переключению из проводящего состояния в состояние прерывания во время завершения. Переключающий элемент, соединенный с цепью проводимости, может защищаться от высокого напряжения (регенеративной энергии).
В настоящем варианте осуществления, переключающая схема 12, схема 30 управления, датчики 6-8 Холла и схема 20 детектирования положения вращения соответствуют примеру устройства торможения настоящего изобретения.
Более конкретно, электродвигатель 2 соответствует примеру бесщеточного электродвигателя настоящего изобретения, переключающая схема 12 соответствует примеру переключающей схемы настоящего изобретения, схема 30 управления (блок 38 управления торможением) соответствует примеру устройства управления торможением настоящего изобретения, датчики 6-8 Холла и схема 20 детектирования положения вращения соответствуют примеру устройства детектирования положения вращения настоящего изобретения.
Управление переключением фаз короткого замыкания В/Н и управление переключением фаз короткого замыкания Н-стороны из тормозов короткого замыкания двух фаз, осуществленные при управлении торможением посредством схемы 30 управления (процесса прерывания сигнала Холла, показанного на ФИГ. 7А, и процесса прерывания таймера, показанного на ФИГ. 7В) соответствуют примеру управления переключением короткого замыкания двух фаз настоящего изобретения, и управление коротким замыканием UV-фаз Н-стороны соответствует примеру прерывистого управления коротким замыканием двух фаз настоящего изобретения.
Хотя вариант осуществления настоящего изобретения был описан выше, настоящее изобретение не ограничено на вышеприведенном варианте осуществления, а может принимать различные варианты осуществления в пределах объема, не отступая от сущности настоящего изобретения.
Например, в вышеприведенном варианте осуществления, в качестве управления торможением электродвигателя 2, один из тормоза короткого замыкания всех фаз и трех типов тормозов короткого замыкания двух фаз (управления переключением фаз короткого замыкания В/Н, управления переключением фаз короткого замыкания Н-стороны и управления коротким замыканием UV-фаз Н-стороны) выбирается посредством манипулирования переключателя 26 пользователем для смены силы торможения.
Этот выбор может автоматически выполняться, исходя из частоты вращения или тому подобного, при торможении электродвигателя 2 посредством схемы 30 управления.
Таким образом, является возможным автоматически выбирать тормоз короткого замыкания двух фаз, имеющий низкую силу торможения (управление коротким замыканием UV-фаз Н-стороны), во время высокочастотного вращения электродвигателя 2 для того, чтобы уменьшить удар, прикладывающийся к электрическому оборудованию, и выбирать тормоз короткого замыкания всех фаз, имеющий высокую силу торможения, во время низкочастотного вращения электродвигателя 2 для того, чтобы немедленно останавливать электродвигатель 2.
Также, не всегда является необходимым подготавливать множество типов тормозов короткого замыкания двух фаз, таких как управление переключением фаз короткого замыкания В/Н, управление переключением фаз короткого замыкания Н-стороны и управление коротким замыканием UV-фаз Н-стороны, как в вышеописанном варианте осуществления. Управление замедлением электродвигателя 2 может выполняться посредством только одного типа тормоза короткого замыкания двух фаз, из которого получается требуемая сила торможения.
В варианте осуществления, описанном выше, объяснено то, что, при выполнении тормоза короткого замыкания двух фаз, два переключающих элемента, из переключающих элементов Ql-Q3, обеспеченных в цепи проводимости на стороне положительного электрода, или переключающих элементов Q4-Q6, обеспеченных в цепи проводимости на стороне отрицательного электрода, выбираются и включаются одновременно.
Однако в полевых транзисторах, составляющих переключающие элементы Ql-Q6 имеются дополнительные диоды. В зависимости от направления электрического тока, электрический ток торможения может протекать через диод без включения переключающих элементов.
Например, ФИГ. 8 представляет собой управление (то есть, управление переключением фаз короткого замыкания Н-стороны), в котором электрический ток торможения протекает таким же образом, как и при управлении переключением фаз короткого замыкания Н-стороны, показанном на ФИГ. 4, из тормозов короткого замыкания двух фаз.
В управлении, показанном на ФИГ. 8, только один из переключающих элементов двух фаз, подлежащих управлению, включается во время управления, аналогичном времени управления на ФИГ. 4. В цепи проводимости, обеспеченной с другими переключающими элементами, электрический ток торможения протекает через диод, обеспеченный переключающим элементом.
Как приведено выше, при управлении коротким замыканием двух фаз, посредством включения только переключающего элемента, обеспеченного в одной из двух цепей проводимости, которые обеспечивают проводимость между контактами электродвигателя 2, протекает электрический ток торможения, и сила торможения может генерироваться в электродвигателе 2. В случае осуществления настоящего изобретения, может быть выбрано такое управление.
Дополнительно, в вышеприведенном варианте осуществления, при управлении коротким замыканием UV-фаз Н-стороны тормоза короткого замыкания двух фаз, посредством установки рабочего периода переключающих элементов на 100-градусный период вращения электродвигателя 2, электрический ток торможения протекает не только к цепи проводимости на стороне отрицательного электрода проводящей UV-фазы, но также к цепи проводимости на стороне отрицательного электрода W-фазы.
Посредством протекания электрического тока торможения в W-фазе, сила торможения, генерируемая при торможении электродвигателя 2, увеличивается. Однако, рабочий период переключающих элементов может быть установлен таким образом, что электрический ток торможения не протекает к цепи проводимости другой фазы (W-фазы), которая не подлежит управлению.
Также, в вышеприведенном варианте осуществления, время переключения управления коротким замыканием двух фаз устанавливается исходя из сигналов детектирования (сигналов Холла) от датчиков 6-8 Холла, которые детектируют положение вращения электродвигателя 2. Время переключения также может устанавливаться посредством использования сигналов детектирования от других датчиков вращения для детектирования положения вращения, таких как энкодер. Дополнительно, время переключения может устанавливаться исходя из индуцированного напряжения, генерируемого в каждой фазе при торможении, или из изменений в электрическом токе, протекающем в каждой фазе.
Также, в вышеприведенном варианте осуществления, схема 30 управления представляет собой микрокомпьютер. Схема 30 управления может быть образована посредством комбинации различных отдельных электронных частей, таких как дискретный элемент, может представлять собой ASIC (Специализированную Интегральную Микросхему), может представлять собой программируемое логическое устройство, такое как FPGA (Программируемая Пользователем Вентильная Матрица), или может представлять собой комбинацию вышеприведенных.
Изобретение относится к области электротехники и может быть использовано для управления бесщеточным электродвигателем инструмента. Техническим результатом является обеспечение надежности при торможении инструмента, приводимого бесщеточным электродвигателем. Устройство торможения для трехфазного бесщеточного электродвигателя в соответствии с одним аспектом настоящего изобретения обеспечено в приводимом в действие электродвигателем инструменте и включает в себя переключающую схему, имеющую шесть переключающих элементов, и устройство управления торможением. Устройство управления торможением выполняет управление коротким замыканием двух фаз при управлении торможением, в котором сила торможения генерируется в электродвигателе. В управлении коротким замыканием двух фаз состояние "включено"/"выключено" каждого из переключающих элементов устанавливается таким образом, что две из трех цепей проводимости, составляющих одну из цепи проводимости стороны положительного электрода, которая соединяет три контакта электродвигателя и сторону положительного электрода источника питания постоянного тока, и цепи проводимости стороны отрицательного электрода, которая соединяет три контакта и сторону отрицательного электрода источника питания, находятся в проводящем состоянии, а другая из трех цепей проводимости находится в непроводящем состоянии. 2 н. и 10 з.п. ф-лы, 11 ил.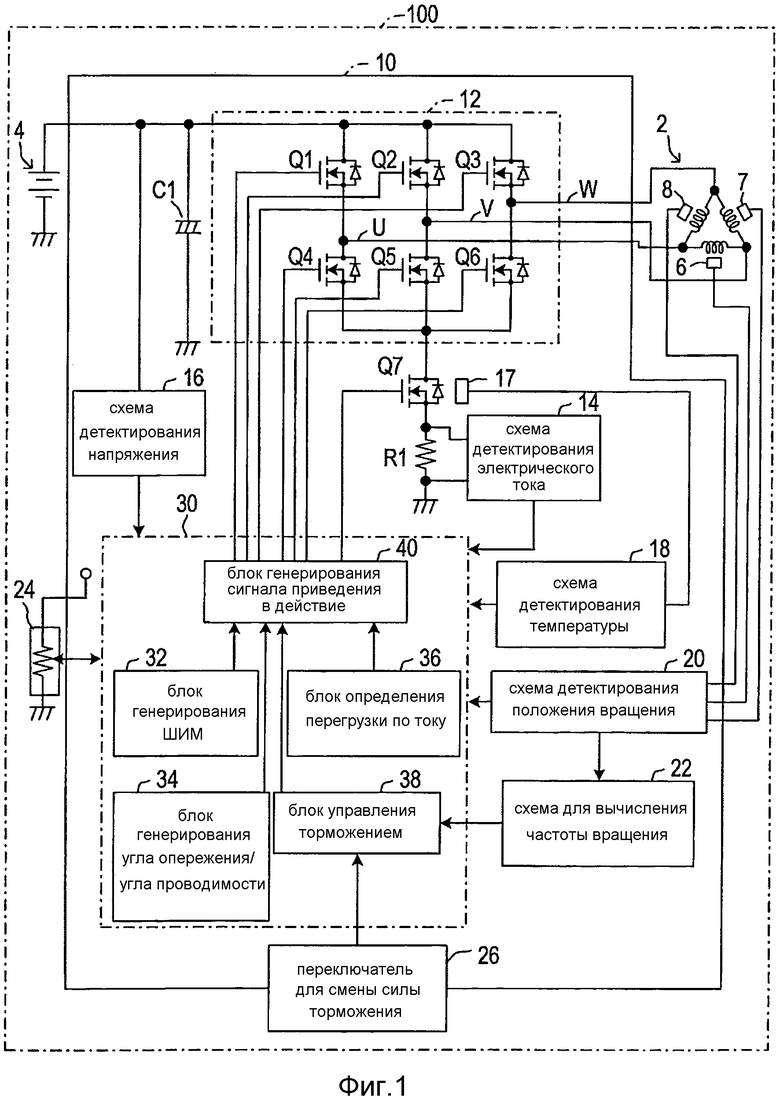
1. Устройство торможения для трехфазного бесщеточного электродвигателя, обеспеченного в приводимом в действие электродвигателем инструменте и имеющего три контакта, причем устройство торможения содержит:
переключающую схему, которая включает в себя шесть переключающих элементов, причем шесть переключающих элементов обеспечены в цепи проводимости стороны положительного электрода, которая соединяет три контакта со стороной положительного электрода источника питания постоянного тока, и в цепи проводимости стороны отрицательного электрода, которая соединяет три контакта со стороной отрицательного электрода источника питания постоянного тока, и выполнены с возможностью проводить или прерывать каждую из цепи проводимости стороны положительного электрода и цепи проводимости стороны отрицательного электрода; и
устройство управления торможением, которое сконфигурировано с возможностью выполнения управления торможением, причем сила торможения генерируется в трехфазном бесщеточном электродвигателе посредством управления состоянием "включено"/"выключено" шести переключающих элементов, когда одна из команды останова и команды замедления трехфазного бесщеточного электродвигателя подается при вращении трехфазного бесщеточного электродвигателя,
причем устройство управления торможением дополнительно сконфигурировано с возможностью выполнения управления коротким замыканием двух фаз, причем состояние "включено"/"выключено" каждого из шести переключающих элементов устанавливается таким образом, что две из трех цепей проводимости, составляющих одну из цепи проводимости стороны положительного электрода и цепи проводимости стороны отрицательного электрода, находятся в проводящем состоянии, а другая из трех цепей проводимости находится в непроводящем состоянии при управлении торможением.
2. Устройство торможения по п. 1, в котором устройство управления торможением сконфигурировано с возможностью детектирования времени, в которое электрический ток, который протекает в каждой фазе трехфазного бесщеточного электродвигателя, является нулевым, в качестве времени завершения управления коротким замыканием двух фаз, исходя из состояния вращения трехфазного бесщеточного электродвигателя, и с возможностью завершения управления коротким замыканием двух фаз при детектированном времени завершения.
3. Устройство торможения по п. 1, содержащее
устройство детектирования положения вращения, которое сконфигурировано с возможностью детектирования положения вращения трехфазного бесщеточного электродвигателя,
причем устройство управления торможением сконфигурировано с возможностью выполнения прерывистого управления коротким замыканием двух фаз, причем управление коротким замыканием двух фаз выполняется прерывисто в соответствии с положением вращения трехфазного бесщеточного электродвигателя, детектированным посредством устройства детектирования положения вращения, и, когда управление коротким замыканием двух фаз не выполняется, все из цепи проводимости стороны положительного электрода и цепи проводимости стороны отрицательного электрода приводятся в непроводящее состояние при управлении торможением.
4. Устройство торможения по п. 1, содержащее
устройство детектирования положения вращения, которое сконфигурировано с возможностью детектирования положения вращения трехфазного бесщеточного электродвигателя,
причем устройство управления торможением сконфигурировано с возможностью выполнения управления переключением короткого замыкания двух фаз, причем две цепи проводимости, которые приводятся в проводящее состояние при управлении коротким замыканием двух фаз, переключаются в соответствии с положением вращения трехфазного бесщеточного электродвигателя, детектированным посредством устройства детектирования положения вращения, при управлении торможением.
5. Устройство торможения по п. 4, в котором устройство управления торможением сконфигурировано с возможностью выполнения управления переключением короткого замыкания двух фаз посредством выбора двух цепей проводимости, приводимых в проводящее состояние при управлении коротким замыканием двух фаз, из трех цепей проводимости, составляющих одну из цепи проводимости стороны положительного электрода и цепи проводимости стороны отрицательного электрода, и переключения комбинации выбираемых цепей проводимости, в соответствии с положением вращения трехфазного бесщеточного электродвигателя.
6. Устройство торможения по п. 4, в котором устройство управления торможением сконфигурировано с возможностью выполнения управления переключением короткого замыкания двух фаз посредством поочередного выбора двух цепей проводимости, приводимых в проводящее состояние при управлении коротким замыканием двух фаз, из трех цепей проводимости, составляющих цепь проводимости стороны положительного электрода, и трех цепей проводимости, составляющих цепь проводимости стороны отрицательного электрода, в соответствии с положением вращения трехфазного бесщеточного электродвигателя.
7. Устройство торможения по п. 3, в котором устройство управления торможением сконфигурировано с возможностью варьирования силы торможения, генерируемой в трехфазном бесщеточном электродвигателе, посредством изменения периода выполнения управления коротким замыканием двух фаз в соответствии с состоянием вращения трехфазного бесщеточного электродвигателя.
8. Устройство торможения по п. 4, в котором устройство управления торможением сконфигурировано с возможностью варьирования силы торможения, генерируемого в трехфазном бесщеточном электродвигателе, посредством изменения периода выполнения управления коротким замыканием двух фаз в соответствии с состоянием вращения трехфазного бесщеточного электродвигателя.
9. Устройство торможения по п. 5, в котором устройство управления торможением сконфигурировано с возможностью варьирования силы торможения, генерируемой в трехфазном бесщеточном электродвигателе, посредством изменения периода выполнения управления коротким замыканием двух фаз в соответствии с состоянием вращения трехфазного бесщеточного электродвигателя.
10. Устройство торможения по п. 6, в котором устройство управления торможением сконфигурировано с возможностью варьирования силы торможения, генерируемого в трехфазном бесщеточном электродвигателе, посредством изменения периода выполнения управления коротким замыканием двух фаз в соответствии с состоянием вращения трехфазного бесщеточного электродвигателя.
11. Устройство торможения по п. 1, в котором устройство управления торможением сконфигурировано таким образом, чтобы быть способным выполнять управление коротким замыканием трех фаз, в котором состояние "включено"/"выключено" каждого из шести переключающих элементов в переключающей схеме устанавливается таким образом, что три цепи проводимости, составляющие одну из цепи проводимости стороны положительного электрода и цепи проводимости стороны отрицательного электрода, приводятся в проводящее состояние, и три цепи проводимости, составляющие другую из них, приводятся в непроводящее состояние, и
причем устройство управления торможением дополнительно сконфигурировано с возможностью управления силой торможения, генерируемой в трехфазном бесщеточном электродвигателе, посредством выполнения управления коротким замыканием трех фаз и управления коротким замыканием двух фаз в комбинации при торможении трехфазного бесщеточного электродвигателя.
12. Приводимый в действие электродвигателем инструмент, содержащий:
трехфазный бесщеточный электродвигатель, имеющий три контакта;
переключающую схему, которая включает в себя шесть переключающих элементов, при этом шесть переключающих элементов обеспечены в цепи проводимости стороны положительного электрода, которая соединяет три контакта со стороной положительного электрода источника питания постоянного тока, и в цепи проводимости стороны отрицательного электрода, которая соединяет три контакта со стороной отрицательного электрода источника питания постоянного тока, и выполнены с возможностью проводить или прерывать каждую из цепи проводимости стороны положительного электрода и цепи проводимости стороны отрицательного электрода; и
устройство управления торможением, которое сконфигурировано с возможностью выполнения управления торможением, в котором сила торможения генерируется в трехфазном бесщеточном электродвигателе посредством управления состоянием "включено"/"выключено" шести переключающих элементов, когда одна из команды останова и команды замедления трехфазного бесщеточного электродвигателя подается при вращении трехфазного бесщеточного электродвигателя,
причем устройство управления торможением дополнительно сконфигурировано с возможностью выполнения управления коротким замыканием двух фаз, в котором состояние "включено"/"выключено" каждого из шести переключающих элементов устанавливается таким образом, что две из трех цепей проводимости, составляющих одну из цепи проводимости стороны положительного электрода и цепи проводимости стороны отрицательного электрода, находятся в проводящем состоянии, а другая из трех цепей проводимости находится в непроводящем состоянии при управлении торможением.
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2398348C1 |
| УСТРОЙСТВО ДЛЯ ТОРМОЖЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1996 |
|
RU2112312C1 |
| Способ динамического торможения вентильного электродвигателя | 1985 |
|
SU1317629A1 |
| АВТОНОМНАЯ ГАЗОНОКОСИЛКА | 1991 |
|
RU2103860C1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| JPH 0728553 B2, 29.03.1995 | |||
| JP 2008022678 A, 31.01.2008 | |||
| US 20110029179 A1, 03.02.2011 | |||
| СПОСОБ ХИРУРГИЧЕСКОГО ДОСТУПА ПРИ ОПЕРАЦИЯХ НА ТАЗОБЕДРЕННОМ СУСТАВЕ | 2004 |
|
RU2281710C2 |
| WO 9204817 A, 02.04.1992. | |||

