Область техники, к которой относится изобретение
Изобретение относится к устройству прямого проецирования, способу прямого проецирования и компьютерной программе для выполнения прямой проекции через изображение. Изобретение дополнительно относится к устройству восстановления для итерационного восстановления изображения интересующей области, которое содержит устройство прямого проецирования, и к устройству формирования изображений для создания изображения интересующей области, которое содержит блок получения для получения проекционных данных и устройство восстановления.
Предшествующий уровень техники
US 2010/0119034 A1 раскрывает устройство, содержащее источник рентгеновского излучения, устройство обнаружения рентгеновского излучения, имеющее каналы и сегменты, и блок обработки сигналов, соединенный, чтобы принимать данные, собранные устройством обнаружения рентгеновского излучения. Блок обработки сигналов сконфигурирован с возможностью определения положения канала на устройстве обнаружения рентгеновского излучения, расположенном на линейном тракте от источника рентгеновского излучения, сквозь пиксель обратной проекции, и определения ширины ядра интерполяции с использованием расстояния от источника рентгеновского излучения до пикселя обратной проекции.
Для итерационного восстановления изображения из проекционных данных, которые могут быть получены посредством использования системы компьютерной томографии, на этапе итерации может быть выполнена прямая проекция через фактическое изображение для создания моделированных проекционных данных, могут быть определены разность между смоделированными проекционными данными и полученными проекционными данными, и упомянутая разность может быть обратно спроецирована для обновления фактического изображения. Несколько из этих этапов итераций могут быть выполнены, пока не выполнится условие завершения.
Прямая проекция может быть реализована, как раскрыто в статье "An Improved Algorithm for Reprojecting Rays Through Pixel Images" by P. M. Joseph IEEE TMI, MI-1, pages 192-196. (1982) («Улучшенный алгоритм для обратного проецирования лучей через пиксельные изображения» под авторством П.М. Джозефа, IEEE TMI, MI-1, стр. 192-196 (1982)), в которой изображение делится на элементы изображения, размещенные в прямоугольной сетке, и в котором ядро интерполяции используется для интерполяции элементов изображения, размещенных вдоль линии, являющейся параллельной главной оси сетки, для вычисления интерполированных значений, расположенных на лучах, вдоль которых выполняется прямая проекция. Интерполированные значения, которые располагаются на одном и том же луче, суммируются для создания значения проекции. Значения проекции, определенные для нескольких лучей, образуют смоделированные проекционные данные.
Итерационное восстановление с использованием вышеупомянутой описанной прямой проекции может привести к искажениям изображения, тем самым, снижая качество восстанавливаемого изображения.
Сущность изобретения
Задачей настоящего изобретения является предоставление устройства прямого проецирования, способа прямого проецирования и компьютерной программы для выполнения прямой проекции через изображение, в которых качество смоделированных проекционных данных, и, таким образом, изображение, которое было итерационно восстановлено посредством использования смоделированных проекционных данных, может быть повышено. Дополнительной задачей настоящего изобретения является предоставление устройства восстановления для итерационного восстановления изображения интересующей области, которое содержит устройство прямого проецирования, и устройства формирования изображений для создания изображения интересующей области, которое содержит устройство восстановления.
В первом аспекте настоящего изобретения представляется устройство прямого проецирования для выполнения прямой проекции через изображение, при этом устройство прямого проецирования содержит:
- блок предоставления лучей для предоставления лучей, проходящих упомянутое изображение, причем упомянутые лучи являются фиктивными лучами, размещенными вдоль прямых линий, исходящих от фиктивного источника излучения,
- блок интерполяции для определения интерполированных значений, расположенных на упомянутых предоставленных лучах, причем блок интерполяции выполнен с возможностью применения ядра интерполяции к множеству элементов изображения упомянутого изображения для определения интерполированных значений,
- блок суммирования для суммирования интерполированных значений, расположенных на соответствующем луче, для определения значения проекции для соответствующего луча,
при этом количество предоставленных лучей и/или межлучевой интервал между упомянутыми предоставленными лучами изменяется в зависимости от ширины луча относительно эффективного интервала между элементами изображения между упомянутыми элементами изображения упомянутого изображения, причем упомянутые элементы изображения размещены в сетке, и при этом эффективный интервал между элементами изображения для луча задается в качестве проекции параллельного главной оси сетки интервала между элементами изображения на линию, являющуюся перпендикулярной упомянутому лучу.
Так как по меньшей мере одно из количества предоставленных лучей, межлучевого интервала между упомянутыми предоставленными лучами и ширины ядра упомянутого ядра интерполяции изменяется в зависимости от ширины луча относительно эффективного интервала между элементами изображения, искажения в моделируемых значениях проекции, образующих проекционные данные и, таким образом, в изображении, которое итерационно восстанавливается посредством использования смоделированных проекционных данных, могут быть уменьшены, тем самым повышая качество смоделированных проекционных данных и итерационно восстановленного изображения. Например, если упомянутое количество предоставленных лучей и/или межлучевой интервал между упомянутыми предоставленными лучами изменяется в зависимости от ширины луча относительно эффективного интервала между элементами изображения, искажения из-за недостаточной дискретизации могут быть уменьшены. Кроме того, если межлучевой интервал между упомянутыми предоставленными лучами и/или ширина ядра упомянутого ядра интерполяции изменяется в зависимости от ширины луча относительно эффективного интервала между элементами изображения, искажения, вызванные посредством изменения эффективных ширин ядер, могут быть уменьшены.
Фиктивный источник излучения соответствует, предпочтительно, реальному источнику излучения, для того чтобы моделировать реальную прямую проекцию.
Сетка является предпочтительно прямоугольной сеткой, имеющей прямоугольные главные оси. Прямоугольная сетка может быть двумерной сеткой или трехмерной сеткой. Эффективный интервал между элементами изображения для луча предпочтительно задается в качестве проекции интервала между элементами изображения, параллельного главной оси сетки, которая может рассматриваться в качестве оси интерполяции сетки, на линию, являющуюся перпендикулярной упомянутому лучу. Ось интерполяции является осью, вдоль которой или параллельно которой размещаются элементы изображения, которые используются для определения интерполированного значения, расположенного на соответствующем луче, то есть ядро интерполяции размещается вдоль или параллельно оси интерполяции.
Лучи предпочтительно отклоняются так, что межлучевой интервал увеличивается с увеличением расстояния до фиктивного источника излучения. Также ширина луча может увеличиваться с увеличением расстояния до фиктивного источника излучения, или ширина луча может быть постоянной с увеличением расстояния до фиктивного источника излучения.
Предпочтительно, блок предоставления лучей выполнен с возможностью предоставления a) внутри первой области, имеющей меньшее расстояние до фиктивного источника излучения, первого количества лучей так, что ширина луча из первого количества лучей меньше или равна эффективному интервалу между элементами изображения, и b) внутри второй области, имеющей большее расстояние до фиктивного источника излучения, второго количества лучей так, что ширина луча из второго количества лучей меньше или равна эффективному интервалу между элементами изображения, причем второе количество лучей больше первого количества лучей, при этом блок интерполяции может быть выполнен с возможностью определения интерполированных значений на первом количестве лучей и на втором количестве лучей. Лучи из первого количества лучей и из второго количества лучей назначаются элементам обнаружения блока обнаружения, при этом блок суммирования выполнен с возможностью определения значения проекции для соответствующего элемента обнаружения посредством суммирования интерполированных значений на лучах из первого количества лучей и второго количества лучей, которые назначаются соответствующему элементу обнаружения. Дополнительно предпочтительно, второе количество лучей вдвое больше первого количества лучей. Поскольку в первой области и во второй области количество лучей отличается, причем в каждой из этих областей количество лучей выбирается так, что ширина луча из количества лучей меньше или равна фиктивному интервалу между элементами изображения, то в обеих областях не возникают искажения из-за недостаточной дискретизации, даже если ширина луча различна в первой и второй областях. Например, если предоставленные лучи отклоняются, то ширина луча первого количества лучей внутри первой области, которая ближе к фиктивному источнику излучения, может быть меньше, а ширина луча второго количества лучей во второй области, которая дальше от фиктивного источника излучения, может быть больше, не вызывая искажений из-за недостаточной дискретизации.
Дополнительно предпочтительно, что первая область и вторая область перекрываются в области перехода, и при этом блок суммирования выполнен с возможностью взвешенного суммирования интерполированных значений на первом количестве лучей и на втором количестве лучей в области перехода. Это гарантирует плавный переход между первой областью и второй областью и, таким образом, дополнительно повышает качество моделируемых значений проекции, образующих проекционные данные, которые могут использоваться для итерационного восстановления изображения интересующей области.
Дополнительно предпочтительно, что блок предоставления лучей выполнен с возможностью предоставления лучей, которые назначаются элементам обнаружения блока обнаружения, причем множество лучей назначаются одному и тому же элементу обнаружения, при этом межлучевой интервал между упомянутыми множеством лучей, назначенных одному и тому же элементу обнаружения, выбирается так, что если ширина луча относительно эффективного интервала между элементами изображения больше, то межлучевой интервал больше. В данном варианте осуществления ширина луча предпочтительно постоянна, то есть с уменьшением эффективного интервала между элементами изображения ширина луча относительно эффективного интервала между элементами изображения увеличивается. Дополнительно предпочитается, что каждый луч связан с эффективной шириной ядра, причем эффективная ширина ядра задается в качестве проекции ширины ядра, размещенной параллельно главной оси сетки, на линию, являющуюся перпендикулярной соответствующему лучу, при этом эффективные ширины ядер упомянутых лучей, назначенных одному и тому же элементу обнаружения, задают эффективную ширину ядра элемента обнаружения, и при этом межлучевой интервал упомянутых лучей, назначенных одному и тому же элементу обнаружения, выбирается так, что эффективные ширины ядер элементов обнаружения множества элементов обнаружения являются подобными. Предпочтительно, межлучевой интервал упомянутых лучей, назначенных одному и тому же элементу обнаружения, выбирается так, что эффективные ширины ядер элементов обнаружения множества элементов обнаружения одинаковы. Это позволяет уменьшить, в частности, устранить искажения, которые могут быть вызваны другими эффективными ширинами ядер.
Предпочтительно, что ширина ядра упомянутого ядра интерполяции изменяется в зависимости от ширины луча относительно эффективного интервала между элементами изображения.
Дополнительно предпочтительно, что блок интерполяции выполнен с возможностью предоставления ядра интерполяции, имеющего большую ширину, если ширина луча относительно эффективного интервала между элементами изображения больше. Также в данном варианте осуществления ширина луча предпочтительно постоянна, то есть с уменьшением эффективного интервала между элементами изображения ширина луча относительно эффективного интервала между элементами изображения увеличивается. Дополнительно предпочтительно, что блок интерполяции выполнен с возможностью предоставления упомянутого ядра интерполяции так, что эффективная ширина ядра является подобной для каждого луча, причем эффективная ширина ядра задается в качестве проекции ширины ядра, размещенной параллельно главной оси сетки, на линию, являющуюся перпендикулярной соответствующему лучу. Дополнительно предпочтительно, что блок интерполяции выполнен с возможностью предоставления ядра интерполяции, имеющего ширину ядра, которая зависит от косинуса угла между соответствующим лучом и линией, перпендикулярной главной оси сетки, являющейся предпочтительно осью интерполяции. Также это уменьшает, в частности, устраняет искажения, которые могут быть вызваны изменяющейся шириной ядра.
В дополнительном аспекте настоящего изобретения представлено устройство восстановления для итерационного восстановления изображения интересующей области из полученных проекционных данных, при этом устройство восстановления содержит:
- устройство прямого проецирования по п.1 для выполнения прямой проекции через изображение интересующей области для создания моделированных проекционных данных,
- блок обратной проекции для обратного проецирования данных, которые основаны по меньшей мере на одном из полученных проекционных данных и смоделированных проекционных данных, для создания изображения,
блок управления для управления устройством прямого проецирования и блоком обратной проекции так, что на этапе итерации выполняются прямая проекция и обратная проекция.
В дополнительном аспекте настоящего изобретения представлено устройство формирования изображений для создания изображения интересующей области, при этом устройство формирования изображений содержит блок получения для получения проекционных данных интересующей области и устройство восстановления по п.11 для итерационного восстановления изображения интересующей области из полученных проекционных данных. Устройство формирования изображений предпочтительно является устройством компьютерной томографии. Однако устройство формирования изображений может также быть другой модальностью формирования изображений типа устройства формирования ядерных изображений, например, устройства позитронно-эмиссионной томографии или устройства однофотонной эмиссионной компьютерной томографии, или рентгеновского устройства с C-образным кронштейном. Устройство формирования изображений может быть любым устройством, которое получает проекционные данные и которое итерационно восстанавливает изображение из проекционных данных, причем в течение итерационного восстановления используются вышеупомянутые устройство прямого проецирования и блок обратной проекции.
В дополнительном аспекте настоящего изобретения представлен способ прямого проецирования для выполнения прямой проекции через изображение, причем упомянутое изображение содержит множество элементов изображения, при этом способ прямого проецирования содержит этапы, на которых:
- предоставляют лучи, проходящие упомянутое изображение, при этом лучи являются фиктивными лучами, размещенными вдоль прямых линий, исходящих от фиктивного источника излучения,
- определяют интерполированные значения, расположенные на предоставленных лучах, при этом применяют ядро интерполяции к множеству элементов изображения упомянутого изображения для определения интерполированных значений, и
- суммируют интерполированные значения, расположенные на соответствующем луче, для определения значения проекции для соответствующего луча,
при этом количество предоставленных лучей и/или межлучевой интервал между упомянутыми предоставленными лучами изменяют в зависимости от ширины луча относительно эффективного интервала между элементами изображения между упомянутыми элементами изображения упомянутого изображения, причем упомянутые элементы изображения размещают в сетке, и при этом эффективный интервал между элементами изображения для луча задают в качестве проекции параллельного главной оси сетки интервала между элементами изображения на линию, являющуюся перпендикулярной лучу.
В дополнительном аспекте настоящего изобретения представлена компьютерная программа для выполнения прямой проекции через изображение, при этом компьютерная программа содержит средство программного кода для предписания устройству прямого проецирования по п.1 осуществлять этапы способа прямого проецирования по п.13, когда компьютерная программа запущена на компьютере, управляющем устройством прямого проецирования.
Следует понимать, что устройство прямого проецирования по п.1, устройство восстановления по п.11, устройство формирования изображений по п.12, способ прямого проецирования по п.13 и компьютерная программа по п.14 имеют схожие и/или идентичные предпочтительные варианты осуществления, в частности, как определено в зависимых пунктах формулы изобретения.
Следует понимать, что предпочтительный вариант осуществления изобретения может также быть любой комбинацией зависимых пунктов формулы изобретения с соответствующим независимым пунктом формулы изобретения.
Эти и другие аспекты изобретения станут очевидны и будут объяснены со ссылкой на варианты осуществления, описанные в дальнейшем.
Краткое описание чертежей
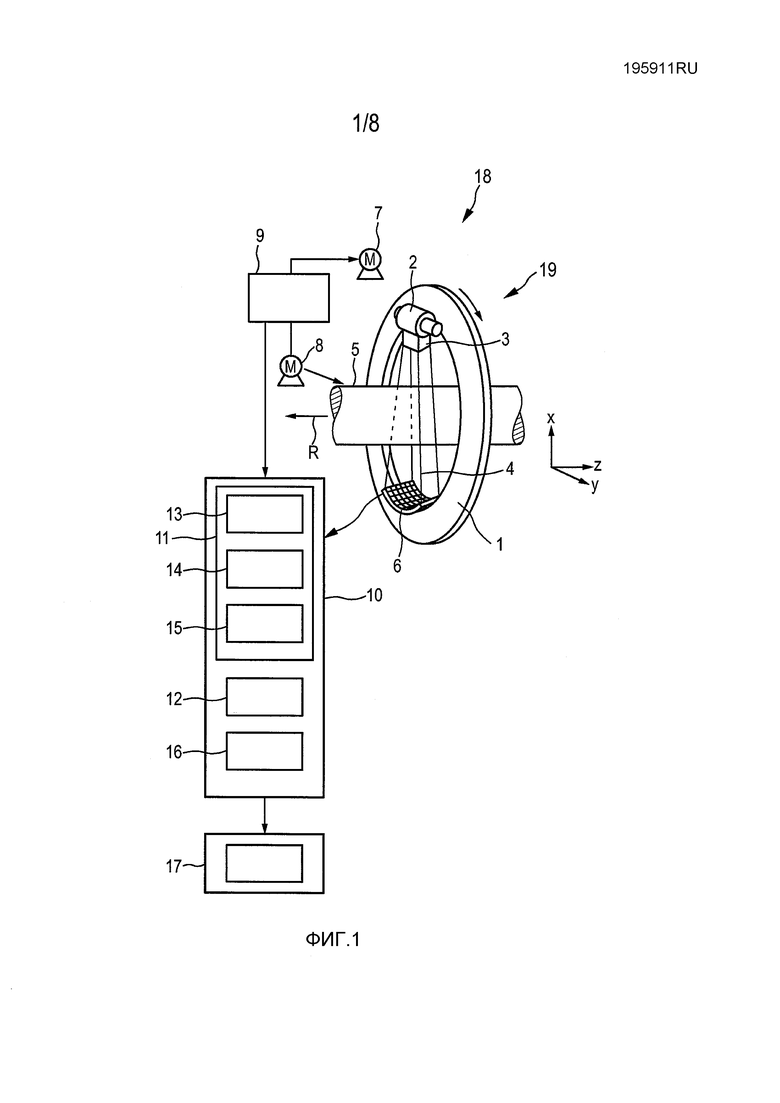
На Фиг.1 схематично и в качестве примера показан вариант осуществления устройства формирования изображений для создания изображения интересующей области,
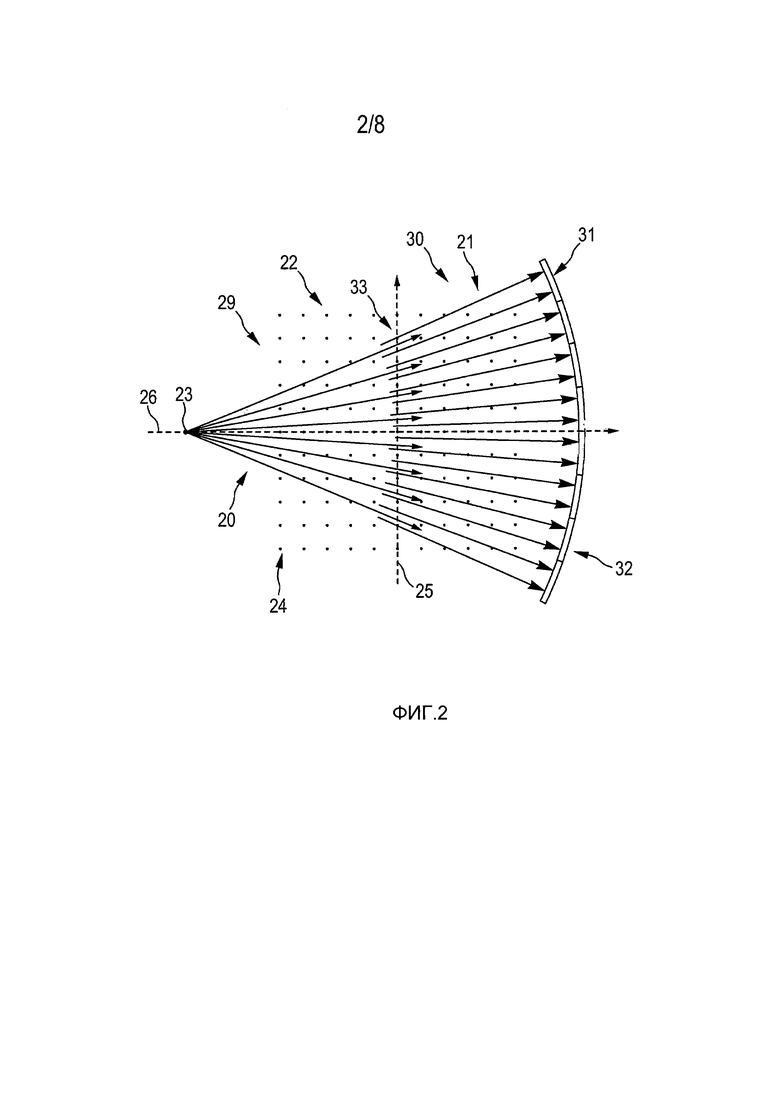
На Фиг.2 изображено изменение некоторого количества лучей,
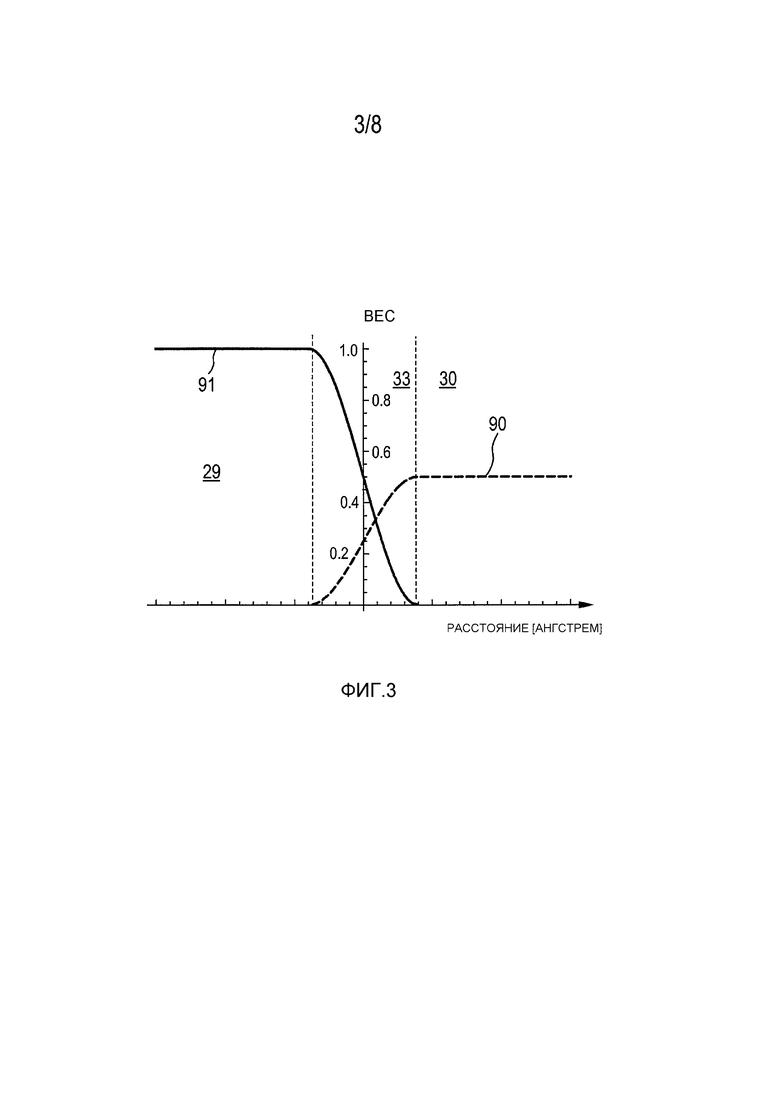
На Фиг.3 показаны в качестве примера веса для взвешивания интерполированных значений на лучах,
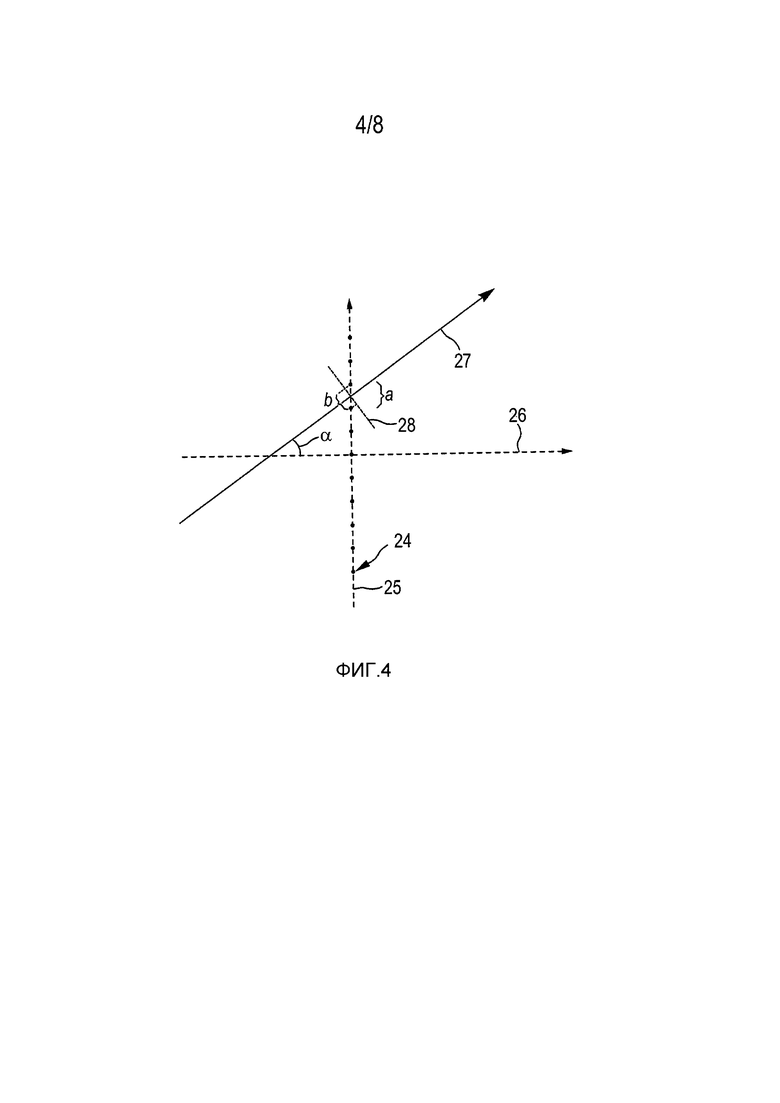
На Фиг.4 схематично и в качестве примера изображен эффективный интервал между элементами изображения,
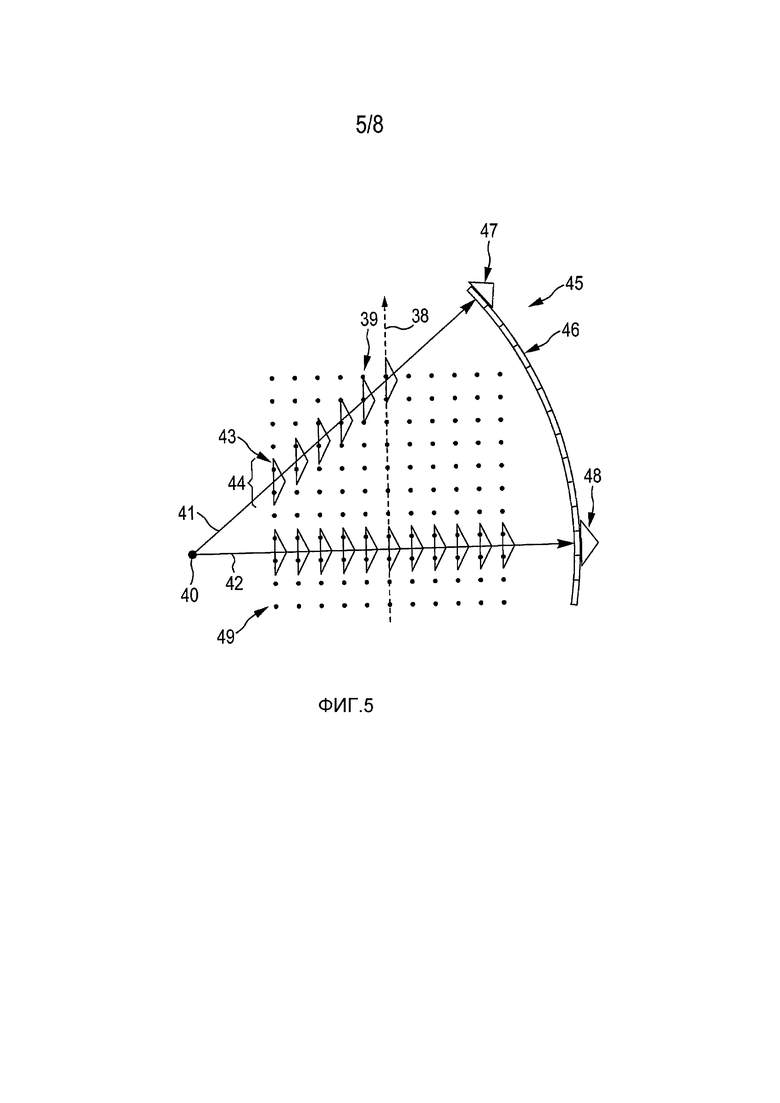
На Фиг. 5 схематично в качестве примера изображен известный способ прямого проецирования,
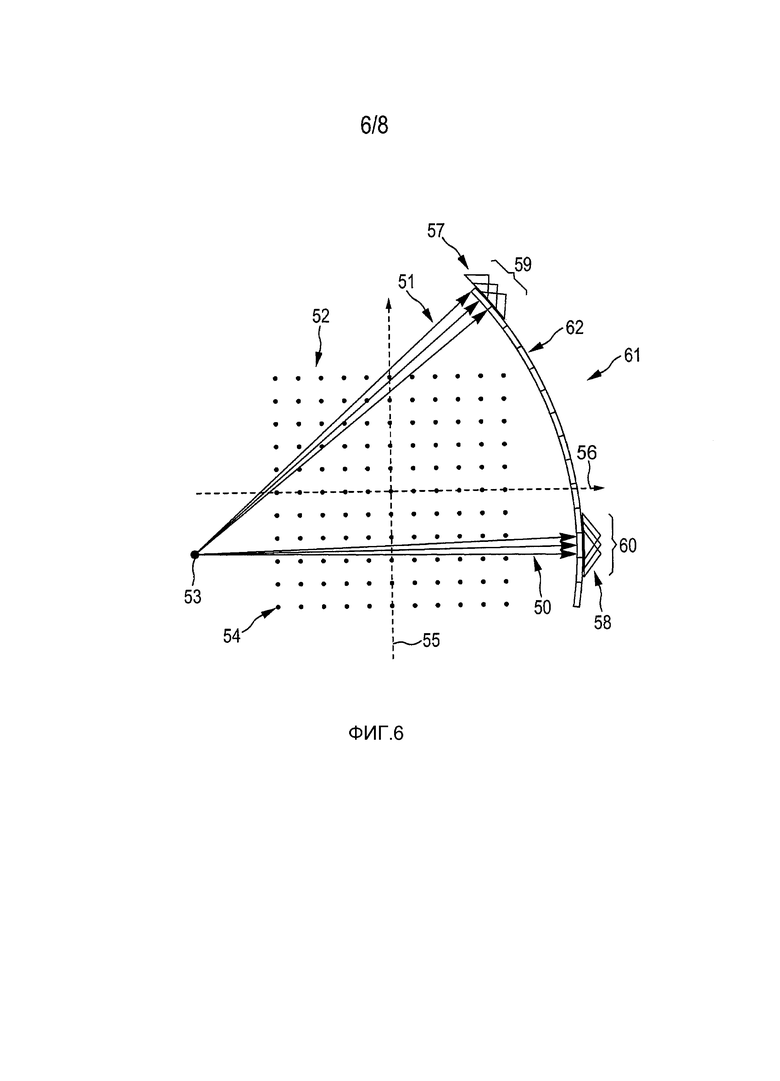
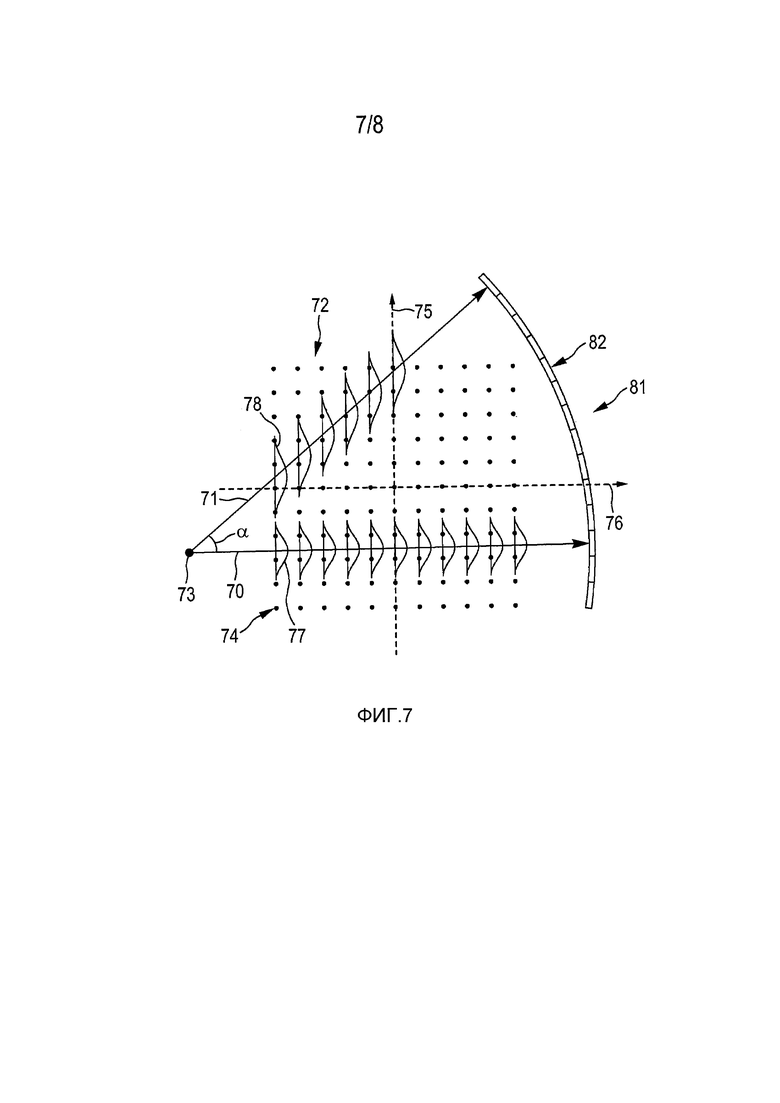
На Фиг.6 и 7 схематично в качестве примера изображены конфигурации прямой проекции для уменьшения действия изменения эффективных ширин ядер интерполяции,
На Фиг.8 показана блок-схема последовательности операций способа, в качестве примера изображающая вариант осуществления способа прямого проецирования для выполнения прямой проекции через изображение, и
На Фиг.9 в качестве примера показана блок-схема последовательности операций способа, изображающая вариант осуществления способа формирования изображений для создания изображения интересующей области.
Подробное описание вариантов осуществления
На Фиг.1 схематично и в качестве примера показано устройство формирования изображений для создания изображения интересующей области. В данном варианте осуществления устройство формирования изображений является устройством 18 компьютерной томографии. Устройство 18 компьютерной томографии включает в себя рамку 1, которая способна поворачиваться вокруг оси R вращения, которая продлевается параллельно z направлению. Источник 2 излучения, который является, в данном варианте осуществления, рентгеновской трубкой, устанавливается на рамке 1. Источник 2 излучения снабжается коллиматором 3, который образует, в данном варианте осуществления, конический пучок 4 излучения из излучения, созданного источником 2 излучения. Излучение проходит объект (не показан), такой как пациент, и интересующую область, которая предпочтительно располагается внутри объекта, в зоне 5 исследования, которая является, в данном варианте осуществления, цилиндрической. После прохождения зоны 5 исследования пучок 4 излучения падает на устройство 6 обнаружения, которое содержит двумерную поверхность обнаружения. Устройство 6 обнаружения устанавливается на рамке 1.
Устройство 18 компьютерной томографии содержит два двигателя 7, 8. Рамка приводится в действие с предпочтительно постоянной, но регулируемой угловой скоростью посредством двигателя 7. Двигатель 8 предоставляется для перемещения объекта, например пациента, размещенного на столе для пациента в зоне 5 исследования, параллельно направлению оси R вращения или оси Z. Двигателями 7, 8 управляют посредством блока 9 управления, например, так, что источник 2 излучения и зона 5 исследования и, таким образом, интересующая область внутри зоны 5 исследования перемещаются друг относительно друга по спиральной траектории. Однако также возможно, что объект или зона 5 исследования не перемещаются, а что поворачивается только источник 2 излучения, то есть что источник излучения перемещается по круговой траектории относительно объекта или зоны 5 исследования. Кроме того, в еще одном варианте осуществления, коллиматор 3 может быть выполнен с возможностью образования другой формы пучка, в частности веерный пучок, а устройство 6 обнаружения может содержать поверхность обнаружения, которая формируется соответствующей другой форме пучка, в частности веерному пучку.
В течение относительного перемещения источника 2 излучения и зоны 5 исследования устройство 6 обнаружения создает проекционные данные в зависимости от излучения, падающего на поверхность обнаружения устройства 6 обнаружения. Поэтому источник 2 излучения, элементы для перемещения источника 2 излучения относительно зоны 5 исследования, в частности двигатель 7, 8 и рамка 1, и устройство 6 обнаружения образуют блок 19 получения для получения проекционных данных интересующей области.
Проекционные данные предоставляются в устройство 10 восстановления для итерационного восстановления изображения интересующей области из полученных проекционных данных.
Устройство 1 восстановления содержит устройство 11 прямого проецирования для выполнения прямой проекции через изображение интересующей области для создания смоделированных проекционных данных, блок 12 обратной проекции для обратного проецирования данных, которые основаны по меньшей мере на одном из полученных проекционных данных и смоделированных проекционных данных, для создания изображения, и блок 16 управления для управления устройством 11 прямого проецирования и блоком 12 обратной проекции так, что на этапе итерации выполняются прямая проекция и обратная проекция. В данном варианте осуществления итерационное восстановление инициализируется первоначальным предварительно определенным изображением, которое может, например, только содержать нули в качестве элементов изображения. На этапе итерации фактическое изображение, которое является, в начале, первоначальным изображением, прямо проецируется посредством устройства прямого проецирования для создания смоделированных проекционных данных. Полученные проекционные данные и смоделированные проекционные данные могут быть вычтены друг из друга, и на том же самом этапе итерации разность может быть обратно спроецирована посредством блока обратной проекции для обновления фактического изображения. Блок 16 управления предпочтительно выполнен с возможностью завершения итерационного восстановления, если условие завершения выполняется. Условие завершения состоит в том, например, что было достигнуто предварительно определенное количество итераций или что отклонение обновленного фактического изображения и фактического изображения до обновления на текущем этапе итерации меньше предварительно определенной пороговой величины. Более подробное описание этого и других итерационных восстановлений, которые могут использовать устройство 11 прямого проецирования, раскрываются, например, в главе "Statistical image reconstruction methods for transmission tomography" by Fessler, Handbook of Medical Imaging, Vol. 2, SPIE Press, edited by J.M. Fritzpatrick and M. Sonka pages 1-70 (2000) («Способы статистического восстановления изображения для трансмиссионной томографии» под авторством Фесслера, Руководство по формированию медицинских изображений, Том 2, SPIE Пресс, под редакцией Дж.М. Фрижпатрика и M. Сонка, стр. 1-70 (2000)), и статье "Cardiac cone-beam CT volume reconstruction using ART" by Nielsen et al, Medical Physics, vol 32, no 4, pages 851-860 (2005) («Восстановление объема при сердечной CT с коническим пучком с использованием ART» под авторством Нильсена и др., Медицинская Физика, том 32, № 4, страницы 851-860 (2005), или "A three-dimensional statistical approach to improved image quality for multislice helical CT" by Thibault et al, Medical Physics, vol 34, no 11, pages 4526-4544 (2007) («Трехмерный статистический подход к повышенному качеству изображения для многослойной спиральной CT» под авторством Тиболта и др., Медицинская Физика, том 34, № 11, страницы 4526-4544 (2007).
Изображение, сформированное посредством устройства 10 восстановления, предоставляется в устройство 17 отображения для отображения созданного изображения.
Также устройством 10 восстановления предпочтительно управляют посредством блока 9 управления. В другом варианте осуществления блок 9 управления может также выполнять управление, которое, в данном варианте осуществления, выполняется посредством блока 16 управления. В этом случае устройство 10 восстановления может не содержать блок 16 управления.
Устройство 11 прямого проецирования содержит блок 13 предоставления лучей для предоставления лучей, проходящих фактическое изображение, для создания значений проекции, образующих моделированные проекционные данные. Лучи являются фиктивными лучами, исходящими от фиктивного источника излучения. Лучи предоставляются так, что они моделируют получение реальных измеренных проекционных данных. Фиктивный источник излучения соответствует, поэтому, реальному источнику 2 излучения. Перемещение фиктивного источника излучения моделируется, что соответствует реальному перемещению, выполняемому реальным источником 2 излучения во время получения реальных измеренных проекционных данных. Таким образом, устройство прямого проецирования выполнено с возможностью моделирования геометрии получения, используемой во время получения реальных измеренных проекционных данных.
Устройство прямого проецирования дополнительно содержит блок 14 интерполяции для определения интерполированных значений, расположенных на упомянутых предоставленных лучах, причем блок 14 интерполяции выполнен с возможностью применения ядра интерполяции к множеству элементов изображения упомянутого изображения для определения интерполированных значений, и блок 15 суммирования для суммирования интерполированных значений, расположенных на соответствующем луче, для определения значения проекции для соответствующего луча. По меньшей мере одно из количества предоставленных лучей, межлучевого интервала между упомянутыми предоставленными лучами и ширины ядра упомянутого ядра интерполяции изменяется в зависимости от ширины луча относительно эффективного интервала между элементами изображения между упомянутыми элементами изображения упомянутого изображения, причем упомянутые элементы изображения размещены в сетке, имеющей несколько главных осей, и при этом эффективный интервал между элементами изображения задается в качестве проекции параллельного главной оси сетки интервала между элементами изображения на линию, являющуюся перпендикулярной соответствующему лучу. Это будет ниже изображено более подробно со ссылкой на Фиг.2-7.
На Фиг.2 в первой области 29, которая имеет меньшее расстояние до фиктивного источника 23 излучения, предоставляется первое количество лучей 20 так, что ширина луча из первого количества лучей 20 меньше или равна эффективному интервалу между элементами изображения. Кроме того, внутри второй области 30, которая имеет большее расстояние до фиктивного источника 23 излучения, предоставляется второе количество лучей 21 так, что ширина луча из второго количества лучей 21 меньше или равна эффективному интервалу между элементами изображения, причем второе количество лучей 21 больше первого количества лучей 20. В частности, второе количество лучей 21 вдвое больше первого количеством лучей 20. На Фиг.2 изображение 22 содержит элементы 24 изображения, размещенные в прямоугольной сетке, имеющей прямоугольные главные оси 25, 26. Лучи 20, 21 отклоняются так, что для одного и того же количества лучей, то есть первого количества лучей 20 или второго количества лучей 21, межлучевой интервал увеличивается с увеличением расстояния до фиктивного источника 23 излучения. Также ширина луча, которая, в данном примере, задается половиной расстояния до непосредственно соседних лучей, увеличивается с увеличением расстояния до фиктивного 23 источника излучения.
В примере, показанном на Фиг.2, блок 14 интерполяции определяет интерполированные значения на первом количестве лучей 20 и на втором количестве лучей 21, и лучи из первого количества лучей 20 и из второго количества лучей 21 назначаются элементам 31 обнаружения блока обнаружения 32, при этом блок 15 суммирования определяет значение проекции для соответствующего элемента 31 обнаружения посредством суммирования интерполированных значений на лучах из первого количества лучей 20 и из второго количества лучей 21, которые назначаются соответствующему элементу 31 обнаружения.
Первая область 29 и вторая область 30 перекрываются в области 33 перехода, и блок 15 суммирования выполнен с возможностью взвешенного суммирования интерполированных значений на первом количестве лучей 20 и на втором количестве лучей 21 в области 33 перехода. Данное взвешивание в качестве примера изображено на Фиг.3. На Фиг.3 показаны веса w, которые используются для взвешивания интерполированных значений на лучах, направленных на конкретный элемент 31 обнаружения, в зависимости от расстояния d до фиктивного источника 23 излучения. В первой области 29 интерполированным значениям на луче из первого количества лучей 20 присваивается вес 1,0, как указано посредством первой кривой 91. Во второй области 30 интерполированным значениям на двух лучах из второго количества лучей 21, которые направлены к тому же самому соответствующему элементу 31 обнаружения, присваивается вес 0,5, как указано посредством второй кривой 90. В области 33 перехода интерполированным значениям на луче из первого количества лучей 20, который направлен к соответствующему элементу 31 обнаружения, присваивается вес, который уменьшается с увеличением расстояния до фиктивного источника 23 излучения, как указано посредством первой кривой 91, и веса для интерполированных значений на двух лучах из второго количества лучей, которые направлены к тому же самому соответствующему элементу 31 обнаружения, увеличиваются с увеличением расстояния до фиктивного источника 23 излучения. Взвешенные интерполированные значения, которые располагаются на лучах, направленных к тому же самому соответствующему элементу 31 обнаружения, добавляются для создания значения проекции для соответствующего элемента 31 обнаружения. Веса предпочтительно выбираются так, что для конкретного расстояния d до фиктивного источника излучения сумма весов для интерполированных значений на лучах, направленных к тому же самому элементу 31 обнаружения, является единицей.
На Фиг.4 в качестве примера изображен эффективный интервал b между элементами изображения. На Фиг.4 показаны некоторые элементы 24 изображения, размещенные вдоль первой главной оси 25 и второй главной оси 26 сетки, содержащей элементы 24 изображения. Дополнительно элементы 24 изображения не показаны на Фиг.4 из соображений ясности. Кроме того, в качестве примера показан луч 27, который охватывает угол α со второй главной осью 26. Интервал a между элементами изображения проецируется на прямую линию 28, которая перпендикулярна лучу 27, для определения эффективного интервала b между элементами изображения.
На Фиг.5 изображена известная процедура прямой проекции, в которой несколько фиктивных лучей, которые исходят от фиктивного источника 40 излучения и от которого только два фиктивных луча 41, 42 показаны в качестве примера, проходят изображение 39, содержащее элементы 49 изображения. Элементы изображения, которые размещены параллельно главной оси 38 сетки элементов 49 изображения, интерполируются посредством использования ядер 43 интерполяции, имеющих некоторую ширину 44 ядра. Эффективная ширина ядра относительно луча 41, которая задается в качестве проекции ширины 44 ядра, размещенной параллельно главной оси 38 сетки, на линию, являющуюся перпендикулярной соответствующему лучу 41, меньше эффективной ширины ядра относительно луча 42. На Фиг.5 это показано посредством треугольников 47 и 48, соответственно, которые имеют различную ширину. Для определения значения проекции для элемента 46 обнаружения устройства 45 обнаружения интерполированные значения, которые располагаются на соответствующем луче 41 или 42, вычисляются посредством использования ядра 43 интерполяции, причем интерполированные значения, расположенные на луче 41, суммируются для создания первого значения проекции, а интерполированные значения, расположенные на лучах 42, суммируются для создания второго значения проекции. Так как эффективная ширина ядра упомянутых ядер интерполяции является различной относительно лучей 41, 42, то в вычисленных значениях проекции вызываются искажения, которые могут привести к искажениям в конечном восстановленном изображении.
Для того чтобы уменьшить, в частности, чтобы устранить данную возможную причину искажений, блок 13 предоставления лучей может быть выполнен с возможностью предоставления лучей 50, 51, которые назначаются элементам 62 обнаружения блока 61 обнаружения, как схематично и в качестве примера изображено на Фиг.6. Множество лучей назначаются одному и тому же элементу 62 обнаружения. Межлучевой интервал между упомянутыми множеством лучей, назначенных одному и тому же элементу 62 обнаружения, выбирается так, что если ширина луча относительно эффективного интервала между элементами изображения больше, то межлучевой интервал больше, при этом, в данном варианте осуществления, ширина луча предполагается постоянной, то есть с уменьшением эффективного интервала между элементами изображения ширина луча относительно эффективного интервала между элементами изображения увеличивается. На Фиг.6 лучи 51 имеют большую ширину луча относительно эффективного интервала между элементами изображения, и, таким образом, межлучевой интервал 51 больше межлучевого интервала 50, для которого ширина луча относительно эффективного интервала между элементами изображения является меньшей.
Подобно размещению, показанному на Фиг.5, ядра интерполяции размещаются так, что ширины ядер размещаются параллельно главной оси 55 сетки, в которой помещены элементы 54 изображения упомянутого изображения 52. Каждый из лучей 50, 51, который исходит от фиктивного источника 53 излучения, связан с эффективной шириной ядра, причем эффективная ширина ядра задается в качестве проекции ширины ядра, размещенной параллельно главной оси 55 сетки, на линию, являющуюся перпендикулярной соответствующему лучу. Эффективные ширины ядер лучей, назначенных одному и тому же элементу обнаружения, задают эффективную ширину 59, 60 ядра элемента обнаружения, причем межлучевой интервал упомянутых лучей, назначенных одному и тому же элементу 62 обнаружения блока обнаружения 61, выбирается так, что эффективная ширина 59, 60 ядра элемента обнаружения множества элементов обнаружения является одинаковой.
Дополнительный вариант осуществления, который позволяет достигать одинаковой эффективной ширины ядра, перпендикулярной соответствующему лучу 70, 71, направленному к соответствующему элементу 82 обнаружения блока обнаружения 81, схематично и в качестве примера изображен на Фиг.7. В данном варианте осуществления блок 14 интерполяции выполнен с возможностью предоставления ядра интерполяции 77, 78, имеющего большую ширину, если ширина луча относительно эффективного интервала между элементами изображения больше. Также в данном варианте осуществления ширина луча предполагается постоянной, то есть с уменьшением эффективного интервала между элементами изображения ширина луча относительно эффективного интервала между элементами изображения увеличивается. Блок 14 интерполяции дополнительно выполнен с возможностью предоставления ядра интерполяции 77, 78 так, что эффективная ширина ядра является одинаковой (равной) для каждого луча 70, 71, в частности так, что их ширина ядра зависит от косинуса угла α между соответствующим лучом и линией, перпендикулярной главной оси 75 сетки.
Изображение может быть представлено посредством многомерных окон Кайзера-Бесселя, как раскрыто, например, в статье "Multi-dimensional digital image representation using generalized Kaiser-Bessel window functions", Lewitt, J.Opt.Soc.Am.A, vol 7, no 10 (2000) («Представление многомерного цифрового изображения с использованием обобщенной функции окна Кайзера-Бесселя», Льюит, J.Opt.Soc.A, том 7, № 10 (2000)). В данном случае представление изображения основано на базисных функциях вида:

где r обозначает расстояние точки дискретизации от центра базисной функции, β обозначает параметр формы, и a обозначает радиус базисной функции. Функция I0 является функцией нулевого порядка. Альтернативно, основная функция может зависеть от функции Бесселя более высокого порядка. Сферически-симметричные базисные функции, как функция Бесселя-Кайзера, часто называют «каплями». Функция интерполяции, то есть ядро интерполяции, перпендикулярная соответствующему лучу, может в данном случае называться «контуром» капли. Для примерной капли, заданной выше, контур является:

где s является расстоянием соответствующего луча до центра капли, то есть точки сетки.
Как уже упоминалось выше, ядро интерполяции может зависеть от косинуса угла α между соответствующим лучом и линией, перпендикулярной главной оси, которая предпочтительно является осью интерполяции, сетки. В частности, ядро интерполяции kα(y), в отношении применения с соответствующей главной осью, является контуром p(s), растянутым на множитель 1/cos(α):

Уравнение (3) может использоваться, если ось интерполяции является осью y. Если ось интерполяции является осью x, в уравнении (3), y может быть заменен на x.
Если изображение является двумерным изображением, то используется одномерное ядро интерполяции, которое размещается вдоль первой главной оси или второй главной оси сетки, которые могут рассматриваться в качестве оси x и оси y, соответственно. Если изображение является трехмерным изображением, двумерные ядра интерполяции предпочтительно используются для выполнения интерполяций в первой главной плоскости сетки или второй главной плоскости сетки, при этом первая главная плоскость сетки и вторая главная плоскость сетки предпочтительно параллельны плоскости x-z и плоскости y-z, соответственно. Двумерное ядро интерполяции в соответствующей плоскости может быть растянуто на множитель 1/cos(β) в направлении x или в направлении y, и на множитель 1/cos(γ) в направлении z, при этом угол β задается как угол между соответствующим лучом и плоскостью x-z, если главная плоскость сетки является плоскостью y-z, и как угол между соответствующим лучом и плоскостью y-z, если главная плоскость сетки является плоскостью x-z, и при этом угол γ является углом между соответствующим лучом и плоскостью x-y, часто называемый углом раствора конуса соответствующего луча.
Представление изображения может, конечно, также быть основано на других базисных функциях, как усеченная базисная функция Гаусса или обобщенная функция Кайзера-Бесселя с параметрами, которые отличаются от параметров, упомянутых выше со ссылкой на уравнение (1), как, например, раскрыто в статье "Practical Considerations for 3D Image Reconstruction using Spherically Symmetric Basis Functions" by Matej and Lewitt, IEEE TMI, vol 15, no 1, pages 68-78 (1996) («Практические рассмотрения восстановления 3-D изображения с использованием сферически-симметричных базисных функций» под авторством Мэтью и Льюита, IEEE TMI, том 15, № 1, страницы 68-78 (1996)).
В следующем варианте осуществления способа прямого проецирования для выполнения прямой проекции через изображение будет в качестве примера описан со ссылкой на блок-схему последовательности операций, показанной на Фиг.8.
На этапе 101 предоставляются лучи, которые проходят изображение, и на этапе 102 определяются интерполированные значения, которые располагаются на предоставленных лучах, при этом ядро интерполяции применяется к множеству элементов изображения упомянутого изображения для определения интерполированных значений, при этом по меньшей мере одно из количества предоставленных лучей, межлучевого интервала между упомянутыми предоставленными лучами и ширины ядра упомянутого ядра интерполяции изменяются в зависимости от ширины луча относительно эффективного интервала между элементами изображения между упомянутыми элементами изображения упомянутого изображения, причем упомянутые элементы изображения размещаются в сетке, имеющей несколько главных осей, и при этом эффективный интервал между элементами изображения задается в качестве проекции параллельного главной оси сетки интервала между элементами изображения на линию, являющуюся перпендикулярной соответствующему лучу. На этапе 103 интерполированные значения, расположенные на соответствующем луче, суммируются для определения значения проекции для соответствующего луча.
Ниже будет в качестве примера описан способ формирования изображений для создания изображения интересующей области со ссылкой на блок-схему последовательности операций, показанной на Фиг.9.
На этапе 201 получают проекционные данные интересующей области, например, посредством использования блока 19 получения, описанного выше со ссылкой на Фиг.1. На этапе 202 полученные проекционные данные используются для итерационного восстановления изображения интересующей области. Итерация начинается с первоначального изображения, которое может быть изображением, имеющим нулевые значения, или которое может быть другим изображением, и на этапе итерации a) выполняется прямая проекция через фактическое изображение, которое вначале является первоначальным изображением, как описано выше со ссылкой на Фиг.8, для определения смоделированных проекционных данных, которые соответствуют полученным проекционным данным; b) вычисляется разность между смоделированными проекционными данными и полученными проекционными данными; и c) разность обратно проецируется для обновления фактического изображения интересующей области. Данный этап итерации повторяется, пока не выполнится условие завершения. Условие завершения выполняется, если, например, этап итерации был повторен предварительно определенное количество раз, разность между полученными проекционными данными и смоделированными проекционными данными оказывается ниже предварительно определенной пороговой величины или если отклонение фактического изображения, обновленного на настоящем этапе итерации от изображения, которое было обновлено на предыдущем этапе итерации, оказывается ниже пороговой величины. На этапе 203 итерационно восстановленное изображение интересующей области показывают на устройстве 17 отображения.
Итерационное восстановление может использоваться, чтобы уменьшить дозу рентгеновского облучения, применяемую к людям или животным в течение сканирования компьютерной томографии. Недостаток итерационного восстановления состоит в высокой вычислительной нагрузке в течение восстановления из-за необходимости в выполнении нескольких прямых проекций и обратных проекций. Чтобы решить данную проблему, предпочтительно осуществляются операция прямой проекции и операция обратной проекции посредством использования блоков графической обработки (GPU). Таким образом, устройство прямого проецирования и блок обратной проекции предпочтительно являются блоками GPU. Прямая проекция может быть осуществлена очень эффективным образом посредством использования аппаратной реализации трехмерных текстур в GPU.
Прямая проекция может быть реализована в качестве так называемой управляемой лучом прямой проекции. Например, для каждого пикселя устройства обнаружения один или несколько лучей могут быть пропущены через изображение, и получается желаемое значение устройства обнаружения, то есть желаемое значение проекции, посредством дискретизации изображения вдоль одного или нескольких лучей и посредством накопления этих значений дискретизаций (отсчетов). Одной частной проблемой, которая может в целом присутствовать в данном подходе, в частности в веерном пучке и геометрии с коническим пучком, является недостаточная дискретизация. Если пропускаемые лучи отклоняются, исходя от фиктивного источника излучения, то вблизи источника излучения расстояние между лучами является относительно малым и изображение может дискретизироваться подходящим образом. Однако дальше от фиктивного источника излучения лучи имеют большее расстояние друг относительно друга, и это может привести к нарушению критерия Найквиста, приводя к искажениям из-за недостаточной дискретизации.
Как описано выше со ссылкой на Фиг.2, для того чтобы преодолеть данную проблему недостаточной дискретизации, может использоваться несколько лучей, по необходимости, адаптивно, то есть может быть адаптивно выполнена сверхдискретизация вдоль пути от фиктивного источника излучения до соответствующего элемента обнаружения. В первой области 29 необходим только один луч на элемент 31 обнаружения, без субдискретизации изображения, тогда как во второй области 30 используются два луча на элемент обнаружения 31 для дискретизации изображения, чтобы подавить искажения из-за недостаточной дискретизации. Если интервал между элементами изображения в области отображения равен интервалу между лучами в изоцентре блока получения, может использоваться один луч на элемент обнаружения, чтобы вычислить вклад изображения от источника излучения до изоцентра без недостаточной дискретизации. Для более удаленной части изображения относительно источника излучения межлучевой интервал больше интервала между элементами изображения и, в варианте осуществления, описанном выше со ссылкой на Фиг.2, используются два подлуча на элемент обнаружения, чтобы вычислить вклад оставшейся части изображения в соответствующее значение проекции. Для того чтобы гарантировать плавный переход между зоной одного луча на элемент обнаружения и зоной, где используется больше лучей на элемент обнаружения, существует малый диапазон перехода, то есть область 33 перехода, в которой, в данном варианте осуществления, вычисляются три луча на элемент обнаружения. В данных зонах предпочтительно используются относительные веса, как показано, например, на Фиг.3.
По сравнению с решением, которое использует, например, два луча на элемент обнаружения вдоль всего пути от источника излучения до соответствующего элемента обнаружения, дополнительное усилие против недостаточной дискретизации может быть уменьшено с множителя в 2 до 3/2 в случае веерного пучка и с множителя в 4 до 5/8 в случае конического пучка, если используется конфигурация луча, описанная выше со ссылкой на Фиг.2, то есть если для пути луча от источника излучения до точки, где плотность луча соответствует плотности элемента изображения, пропускается только один луч на элемент обнаружения, и если для дополнительного пути до соответствующего элемента обнаружения пропускаются два подлуча через изображение, которое может быть двумерным или трехмерным изображением.
Вышеупомянутая статья Джозефа описывает реализацию прямой проекции, которая может использовать луч и конфигурацию ядра интерполяции, описанную выше со ссылкой на Фиг.5, то есть на Фиг.5 изображена прямая проекция, предложенная Джозефом, в которой для каждого луча выполняется линейная интерполяция внутри каждой линии сетки, являющейся параллельной главной оси 38. На Фиг.5 линейная интерполяция изображается посредством треугольных ядер интерполяции. Если изображение является трехмерным изображением, линейная интерполяция выполняется внутри каждой главной плоскости сетки, которая соответствует линиям, параллельным главной оси в двумерном случае.
Один недостаток прямой проекции, предложенной Джозефом, состоит в том, что ядро интерполяции имеет постоянную ширину относительно главной оси сетки. Это подразумевает, что эффективная ширина ядра, перпендикулярного соответствующему лучу ядра интерполяции, изменяется на множитель √2. Это указано на Фиг.5 посредством треугольников 47, 48 в положениях соответствующих элементов обнаружения. Луч 42, показанный на Фиг.5, пропускается перпендикулярно главной оси 38. Полная ширина в половину максимума эффективного ядра интерполяции равна интервалу между элементами изображения. Другой луч 41 пропускается почти под 45 градусов относительно главной оси 38 так, что эффективная ширина ядра для данного другого луча 41 составляет примерно интервал элементов изображения, разделенный на √2.
Могут пропускаться несколько лучей на элемент обнаружения, например, для того чтобы избежать искажений из-за недостаточной дискретизации. В данном случае эффект от изменения эффективной ширины ядра может компенсироваться должным образом выбранным интервалом между лучами, которые направляются на один и тот же соответствующий элемент обнаружения и которые могут рассматриваться в качестве подлучей, как описано выше со ссылкой на Фиг.6. Посредством использования большего межлучевого интервала с меньшей эффективной шириной ядра можно достигнуть того, что полная эффективная ширина ядра средней величины, в варианте осуществления, описанном выше со ссылкой на Фиг.6, трех отдельных лучей поддерживается постоянной для всех углов луча. Конечно, изобретение не ограничивается определенным числом отдельных лучей, пропущенных на элементы обнаружения через изображение. Например, также может быть пропущено более трех лучей на элемент обнаружения.
Альтернативный подход к решению проблемы изменения эффективных ширин ядер описывается выше со ссылкой на Фиг.7. Ядра интерполяции высшего порядка используются вместо ядер линейной интерполяции, которые могут использоваться в двумерном случае, или вместо ядер билинейной интерполяции, которые могут использоваться в трехмерном случае, внутри каждой линии, параллельной главной линии сетки или оси, в двумерном случае, или внутри каждой главной плоскости сетки в трехмерном случае. Ширина ядра может регулироваться под угол между соответствующим лучом и линиями, являющимися параллельными главной оси или главной плоскости сетки, соответственно, чтобы гарантировать постоянную ширину ядра, перпендикулярную соответствующему лучу. В частности, ядра интерполяции, совпадающие с линиями, являющимися параллельными главной оси или главным плоскостям сетки, соответственно, под углом совпадения могут быть растянуты на множитель 1/косинус угла совпадения, при этом угол совпадения может быть углом между лучом, перпендикулярным главной оси или главной линии сетки, и другим лучом, для которого должно быть задано ядро интерполяции.
Хотя на Фиг.2 и 5-7 показаны только двумерные изображения, изобретение не ограничивается двумерным случаем. Устройство прямого проецирования, устройство восстановления и устройство формирования изображений могут быть выполнены с возможностью осуществлять восстановление двумерных изображений и/или трехмерных изображений.
Хотя на Фиг.2 и 5-7 показаны только несколько лучей из соображений разборчивости, устройство прямого проецирования предпочтительно выполняется с возможностью пропускания фиктивных лучей ко всем элементам обнаружения блока обнаружения, при этом могут пропускаться один или несколько лучей на элемент обнаружения.
Другие изменения к раскрытым вариантам осуществления могут быть поняты и осуществлены специалистами в уровне техники при реализации заявляемого изобретения после изучения чертежей, раскрытия и прилагаемой формулы изобретения.
В формуле изобретения слово «содержит» не исключает других элементов или этапов, а использование единственного числа не исключает множества.
Один блок или устройство могут выполнять функции нескольких элементов, изложенных в формуле изобретения. Сам факт того, что конкретные критерии рассказываются во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих критериев не может использоваться для получения преимущества.
Вычисления, как прямая и обратная проекции, выполняемые посредством одного или нескольких блоков или устройств, могут быть выполнены любым другим количеством блоков или устройств. Например, этапы 101-103 и этап 202 могут быть выполнены посредством одного блока или посредством любого другого количества различных блоков. Вычисления и/или управление устройством прямого проецирования в соответствии со способом прямого проецирования и/или управление устройством формирования изображений в соответствии со способом формирования изображений могут быть реализованы в качестве средств программного кода компьютерной программы и/или в качестве выделенных аппаратных средств.
Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптический носитель хранения информации или твердотельный носитель, поставляемые совместно с или в качестве части других аппаратных средств, но может также распространяться в других формах, например через Интернет или другие проводные или беспроводные телекоммуникационные системы.
Любая ссылочная позиция в формуле изобретения не должна рассматриваться как ограничивающая объем изобретения.
Изобретение относится к устройству прямого проецирования для выполнения прямой проекции через изображение, в котором по меньшей мере одно из некоторого количества лучей для выполнения прямой проекции, межлучевого интервала между упомянутыми лучами и ширины ядра у ядра интерполяции для вычисления интерполированных значений, расположенных на упомянутых лучах, изменяется в зависимости от ширины луча относительно эффективного интервала между элементами изображения между элементами изображения упомянутого изображения. Это позволяет уменьшать искажения в моделированных проекционных данных и, таким образом, в изображении, которое итерационно восстанавливается посредством использования смоделированных проекционных данных. Например, если упомянутое количество предоставленных лучей и/или межлучевой интервал между упомянутыми предоставленными лучами изменяется, то искажения из-за недостаточной дискретизации могут быть уменьшены. Кроме того, если межлучевой интервал между упомянутыми предоставленными лучами и/или ширина ядра у ядра интерполяции изменяется, то искажения, вызванные посредством изменения эффективной ширины ядра, могут быть уменьшены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ СПИРАЛЬНОЙ КТ И СПОСОБЫ РЕКОНСТРУКЦИИ | 2015 |
|
RU2595312C1 |
| Способ формирования медицинского изображения | 2019 |
|
RU2736160C1 |
| СПОСОБЫ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПЛАСТА И БУРОВОЙ СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ ТОМОГРАФИИ ФРЕНЕЛЕВСКОГО ОБЪЕМА | 2003 |
|
RU2331089C2 |
| ПРОЕКЦИОННЫЙ ЭКРАН | 2013 |
|
RU2574413C2 |
| СПОСОБ ПОЛУЧЕНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА, СОДЕРЖАЩЕГО МЕТАЛЛИЧЕСКИЕ ВКЛЮЧЕНИЯ, В КОМПЬЮТЕРНОЙ ТОМОГРАФИИ | 2022 |
|
RU2801336C1 |
| РЕГИСТРАЦИЯ ДВУМЕРНЫХ/ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ НА ОСНОВЕ ПРИЗНАКОВ | 2008 |
|
RU2568635C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ СЛУЧАЙНЫХ ВОЛНОВЫХ НЕОДНОРОДНОСТЕЙ СРЕДЫ, МЕНЯЮЩИХСЯ ВО ВРЕМЕНИ | 1995 |
|
RU2099690C1 |
| ПРОЕКЦИЯ С ДВОЙНЫМ НАЛОЖЕНИЕМ | 2011 |
|
RU2575981C2 |
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ, УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЙ И НОСИТЕЛЬ ДАННЫХ | 2018 |
|
RU2709437C1 |
| РЕНТГЕНОВСКАЯ СИСТЕМА, В ЧАСТНОСТИ СИСТЕМА ТОМОСИНТЕЗА, И СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА | 2014 |
|
RU2665125C2 |
Изобретение относится к области проецирования через изображение. Технический результат - обеспечение повышения качества смоделированных проекционных данных посредством уменьшения искажений. Устройство прямого проецирования для выполнения прямой проекции через изображение содержит: блок генерирования лучей для генерирования лучей, проходящих упомянутое изображение, причем упомянутые лучи являются фиктивными лучами, направленными вдоль прямых линий, исходящих от фиктивного источника излучения; блок интерполяции для определения интерполированных значений, расположенных на упомянутых сгенерированных лучах, причем блок интерполяции выполнен с возможностью применения ядра интерполяции к множеству элементов изображения упомянутого изображения для определения интерполированных значений; блок суммирования для суммирования интерполированных значений, расположенных на соответствующем луче, для определения значения проекции для соответствующего луча; при этом количество сгенерированных лучей и/или межлучевой интервал между упомянутыми сгенерированными лучами изменяется в зависимости от ширины луча относительно эффективного интервала между элементами изображения. 5 н. и 9 з.п. ф-лы, 9 ил.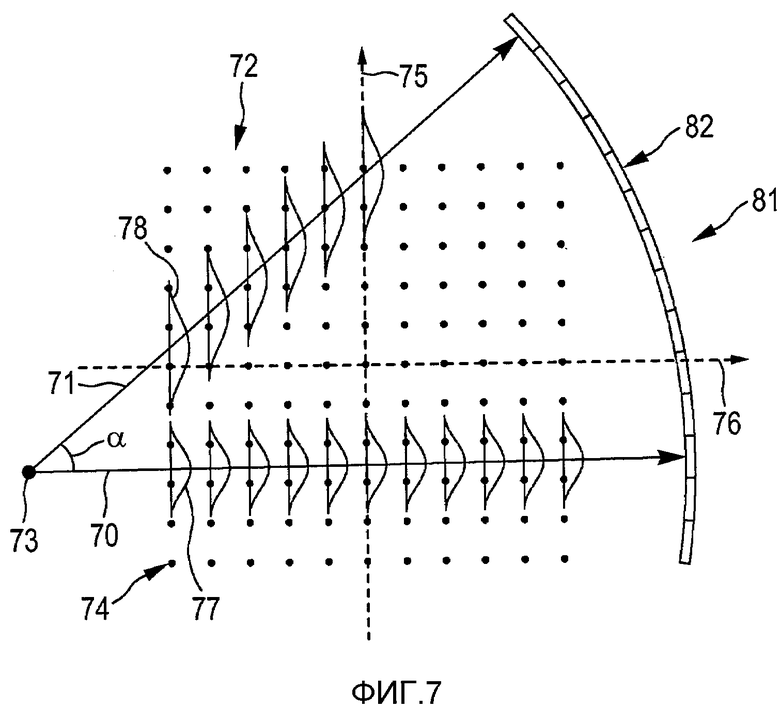
1. Устройство прямого проецирования для выполнения прямой проекции через изображение, причем устройство (11) прямого проецирования содержит:
блок (13) генерирования лучей для генерирования лучей (20, 21; 50, 51; 70, 71), проходящих упомянутое изображение (22; 52; 72), причем упомянутые лучи (20, 21; 50, 51; 70, 71) являются фиктивными лучами, направленными вдоль прямых линий, исходящих от фиктивного источника (23; 53; 73) излучения,
блок (14) интерполяции для определения интерполированных значений, расположенных на упомянутых сгенерированных лучах (20, 21; 50, 51; 70, 71), причем блок (14) интерполяции выполнен с возможностью применения ядра интерполяции к множеству элементов (24; 54; 74) изображения упомянутого изображения (22; 52; 72) для определения интерполированных значений,
блок (15) суммирования для суммирования интерполированных значений, расположенных на соответствующем луче, для определения значения проекции для соответствующего луча,
при этом количество сгенерированных лучей и/или межлучевой интервал между упомянутыми сгенерированными лучами изменяется в зависимости от ширины луча относительно эффективного интервала между элементами изображения между упомянутыми элементами (24; 54; 74) изображения упомянутого изображения (22; 52; 72), причем упомянутые элементы (24; 54; 74) изображения размещены в сетке (25, 26; 55, 56; 75, 76), и при этом эффективный интервал между элементами изображения для луча задается в качестве проекции параллельного главной оси (25; 55; 75) сетки интервала между элементами изображения на линию, являющуюся перпендикулярной упомянутому лучу.
2. Устройство прямого проецирования по п. 1, в котором
блок (13) генерирования лучей выполнен с возможностью генерировать
внутри первой области (29), имеющей меньшее расстояние до фиктивного источника (23) излучения, первое количество лучей (20) так, что ширина луча для первого количества лучей меньше или равна эффективному интервалу между элементами изображения,
внутри второй области (30), имеющей большее расстояние до фиктивного источника (23) излучения, второе количество лучей (21) так, что ширина луча для второго количества лучей (21) меньше или равна эффективному интервалу между элементами изображения, причем второе количество лучей (21) больше первого количества лучей (20),
блок (14) интерполяции выполнен с возможностью определения интерполированных значений на первом количестве лучей (20) и на втором количестве лучей (21),
лучи из первого количества лучей и из второго количества лучей назначаются элементам (31) обнаружения блока (32) обнаружения, при этом блок (15) суммирования выполнен с возможностью определения значения проекции для соответствующего элемента обнаружения посредством суммирования интерполированных значений на лучах из первого количества лучей (20) и второго количества лучей (21), которые назначаются соответствующему элементу обнаружения.
3. Устройство прямого проецирования по п. 2, в котором второе количество лучей (21) вдвое больше первого количества лучей (20).
4. Устройство прямого проецирования по п. 2, в котором первая область (29) и вторая область (30) перекрываются в области (33) перехода, при этом блок (15) суммирования выполнен с возможностью взвешенного суммирования интерполированных значений на первом количестве лучей (20) и на втором количестве лучей (21) в области (33) перехода.
5. Устройство прямого проецирования по п. 1, в котором блок (13) генерирования лучей выполнен с возможностью генерирования лучей (50, 51), которые назначаются элементам (62) обнаружения блока (61) обнаружения, причем множество лучей назначаются одному и тому же элементу обнаружения, при этом межлучевой интервал между упомянутым множеством лучей, назначенных одному и тому же элементу обнаружения, выбирается так, что если ширина луча относительно эффективного интервала между элементами изображения больше, то межлучевой интервал больше.
6. Устройство прямого проецирования по п. 5, в котором каждый луч связан с эффективной шириной ядра, причем эффективная ширина ядра задается в качестве проекции ширины ядра, размещенной параллельно главной оси сетки, на линию, являющуюся перпендикулярной соответствующему лучу, при этом эффективные ширины ядер упомянутых лучей, назначенных одному и тому же элементу обнаружения, задают эффективную ширину (59, 60) ядра элемента обнаружения, и при этом межлучевой интервал упомянутых лучей, назначенных одному и тому же элементу обнаружения, выбирается так, что эффективные ширины (59, 60) ядер элементов обнаружения множества элементов обнаружения являются подобными.
7. Устройство прямого проецирования по п. 1, в котором ширина ядра упомянутого ядра интерполяции изменяется в зависимости от ширины луча относительно эффективного интервала между элементами изображения.
8. Устройство прямого проецирования по п. 7, в котором блок (14) интерполяции выполнен с возможностью предоставления ядра (77, 78) интерполяции, имеющего большую ширину, если ширина луча относительно эффективного интервала между элементами изображения больше.
9. Устройство прямого проецирования по п. 8, в котором блок (14) интерполяции выполнен с возможностью предоставления упомянутого ядра (77, 78) интерполяции так, что эффективная ширина ядра является подобной для каждого луча, причем эффективная ширина ядра задается в качестве проекции ширины ядра, размещенной параллельно главной оси сетки, на линию, являющуюся перпендикулярной соответствующему лучу.
10. Устройство прямого проецирования по п. 8, в котором блок (14) интерполяции выполнен с возможностью предоставления ядра (77, 78) интерполяции, имеющего ширину ядра, которая зависит от косинуса угла между соответствующим лучом и линией, перпендикулярной главной оси сетки.
11. Устройство восстановления для итерационного восстановления изображения интересующей области из полученных проекционных данных, при этом устройство (10) восстановления содержит:
устройство (11) прямого проецирования по п. 1 для выполнения прямой проекции через изображение интересующей области для создания смоделированных проекционных данных,
блок (12) обратной проекции для обратного проецирования данных, которые основаны на по меньшей мере одном из полученных проекционных данных и смоделированных проекционных данных, для формирования изображения,
блок (16) управления для управления устройством (11) прямого проецирования и блоком (12) обратной проекции так, что на шаге итерации выполняются прямая проекция и обратная проекция.
12. Устройство формирования изображений для создания изображения интересующей области, при этом устройство (18) формирования изображений содержит блок (19) получения для получения проекционных данных интересующей области и устройство (10) восстановления по п. 11 для итерационного восстановления изображения интересующей области из полученных проекционных данных.
13. Способ прямого проецирования для выполнения прямой проекции через изображение, содержащее множество элементов изображения, при этом способ прямого проецирования содержит этапы, на которых:
генерируют лучи (20, 21; 50, 51; 70, 71), проходящие упомянутое изображение (22; 52; 72), при этом лучи (20, 21; 50, 51; 70, 71) являются фиктивными лучами, направленными вдоль прямых линий, исходящих от фиктивного источника (23; 53; 73) излучения,
определяют интерполированные значения, расположенные на сгенерированных лучах (20, 21; 50, 51; 70, 71), при этом применяют ядро интерполяции к множеству элементов (24; 54; 74) изображения упомянутого изображения (22; 52; 72) для определения интерполированных значений, и
суммируют интерполированные значения, расположенные на соответствующем луче, для определения значения проекции для соответствующего луча,
при этом количество сгенерированных лучей и/или межлучевой интервал между упомянутыми сгенерированными лучами изменяются в зависимости от ширины луча относительно эффективного интервала между элементами изображения между упомянутыми элементами (24; 54; 74) изображения упомянутого изображения (22; 52; 72), причем упомянутые элементы (24; 54; 74) изображения размещаются в сетке (25, 26; 55, 56; 75, 76), и при этом эффективный интервал между элементами изображения для луча задается в качестве проекции параллельного главной оси (25; 55; 75) сетки интервала между элементами изображения на линию, являющуюся перпендикулярной лучу.
14. Машиночитаемый носитель информации, на котором сохранена компьютерная программа для выполнения прямой проекции через изображение, при этом компьютерная программа содержит средства программного кода для предписания устройству прямого проецирования по п. 1 осуществлять этапы способа прямого проецирования по п. 13, когда компьютерная программа запущена на компьютере, управляющем устройством прямого проецирования.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 6525729 B1, 25.02.2003 | |||
| US 5760781 A, 02.06.1998 | |||
| US 7786991 B2, 31.08.2010 | |||
| US 6587537 B1, 01.07.2003 | |||
| СИСТЕМА И СПОСОБ ДЛЯ РЕКОНСТРУИРОВАНИЯ ИЗОБРАЖЕНИЯ ПОСРЕДСТВОМ СКАНИРОВАНИЯ ПО ПРЯМОЛИНЕЙНОЙ ТРАЕКТОРИИ | 2006 |
|
RU2334973C1 |

